Roboty Mobilne
Opisane wczeķniej ukģady dģoni - systemy oczne mogą byæ uwaŋane za "roboty", ale nie mogģy poruszaæ się ze swojej ustalonej bazy. Do tego czasu niewiele robiono na robotach mobilnych, mimo ŋe zyskiwaģy one znaczącą pozycję w nauce. Wspomniaģem juŋ o "ŋóģwiach Graya", które byģy wczesnymi wersjami autonomicznych robotów mobilnych. Na początku lat 60. naukowcy z Laboratorium Fizyki Stosowanej Uniwersytetu Johna Hopkinsa zbudowali robota mobilnego o nazwie "Bestia". Kontrolowany przez pokģadową elektronikę i kierowany czujnikami sonarowymi, fotokomórkami i ramieniem "wyczuwającym pģytę ķcienną", mógģ wędrowaæ po korytarzach o biaģych ķcianach w poszukiwaniu ciemnych wtyczek zasilania. Po znalezieniu jednego, a jeķli jego baterie byģyby sģabe, podģączaģby się i ģadowaģ jego baterie. System jest opisany w ksiąŋce Hansa Moravca. Od poģowy lat 60. kilka grup zaczęģo pracowaæ nad robotami mobilnymi, w tym AI Labs w SRI i Stanford. Zacznę od obszernego opisu Projekt robota SRI dla niego dostarczyģ bodžca do wynalezienia i integracji kilku waŋnych technologii AI.
Shakey, robot SRI
W listopadzie 1963 r. Charles Rosen, lider badaņ sieci neuronowych w SRI, napisaģ notatkę, w której zaproponowaģ opracowanie mobilnego "automatu", który ģączyģby funkcje rozpoznawania wzorców i pamięci sieci neuronowych z programami AI wyŋszego poziomu { takie jak byģy opracowywane w MIT, Stanford, CMU i gdzie indziej. Rosen wczeķniej uczestniczyģ w letnim kursie na UCLA na LISP prowadzonym przez Bertrama Raphaela, który koņczy doktorat w SIR ,na MIT. Rosen, i inni w jego grupie natychmiast zaczęli myķleæ o robotach mobilnych. Zatrudnili równieŋ Marvina Minsky′ego jako konsultanta, który miaģ pomagaæ. Minsky spędziģ dwa tygodnie w SRI w sierpniu 1964 roku. Zrobili pierwszą z wielu podróŋy do biura ARPA (w tym czasie w Pentagonie), aby wzbudziæ zainteresowanie wspieraniem badaņ robotów mobilnych w SRI. Rozmawialiķmy równieŋ z Ruth Davis, dyrektorem Departamentu Badaņ i Inŋynierii Obronnej (DDR i E) - biura odpowiedzialnego za wszystkie badania Departamentu EFENS. W kwietniu 1964 r. Napisali do DDR & E propozycję "Badania w inteligentnych automatach (faza I)", która, jak twierdzili, ostatecznie doprowadziģy do opracowania maszyn, które będą wykonywaæ zadania, które obecnie uwaŋa się za wymagające ludzkiej inteligencji. "Propozycja wraz z kilkoma wyjazdami i dyskusjami zakoņczyģa się w listopadzie 1964 r. oķwiadczeniem "work" wydanym przez ówczesnego dyrektora ARPA Biuro Technik Przetwarzania Informacji, Ivan Sutherland. Fragment poniŋszy opisuje cele programu.
W międzyczasie Bertram Raphael ukoņczyģ studia doktoranckie MIT. Dyplom uzyskaģ w 1964 i objąģ stanowisko w UC Berkeley na rok akademicki. W kwietniu 1965 r. przyjąģ ofertę doģączenia do SRI, aby zapewniæ naszej grupie niezbędną wiedzę specjalistyczną w zakresie sztucznej inteligencji. Po kilku projektach propozycji badaņ i dyskusjach z osobami w odpowiednich biurach Departamentu Obrony (skomplikowane tym, ŋe Ivan Sutherland opuķciģ ARPA w tym czasie), SRI otrzymaģo w koņcu doķæ duŋy (jak na razie) kontrakt oparty zasadniczo na pracy Sutherlanda . Datą "rozpoczęcia pracy" w projekcie, którym zarządzaģo ARPA przez Rome Air Development Center (RADC) w Rzymie w Nowym Jorku, byģ 17 marca 1966 r. Ruth Davis odegraģ znaczącą rolę w zachęcaniu ARPA i RADC do kontynuacji realizacji projektu. "Ģączenie" kilku róŋnych technologii AI byģo jednym z gģównych wyzwaņ i jednym z gģównych wkģadów projektu automatyki SRI. Jednym z zadaņ byģa faktyczna budowa pojazdu-robota, którego dziaģania byģyby kontrolowane przez pakiet programów. Z powodu róŋnych dziwactw inŋynieryjnych pojazd zatrząsģ się, gdy nagle się zatrzymaģ. Wkrótce nazwaliķmy go "Shakey", chociaŋ jeden z badaczy uwaŋaģ to za zbyt lekcewaŋące. [Shakey zostaģ wprowadzony do "Robot Hall of Fame" ( wraz z C-3PO między innymi) ] w 2004 r. Zostaģ równieŋ uznany jako piąty najlepszy robot wszechczasów (spoķród 50) wedģug magazynu Wired w styczniu 2006 r. Numery 2 i 4 Wireda byģy oficjalne, "Spirit" i "Opportunity" (roboty masrsjaņskie) byģy numerem 3, a "Stanley" (zwycięzca 2005 roku DARPA "Grand Challenge") zostaģa uznany "robotem wszech czasów nr 1". Shakey jest teraz wystawiany w Computer History Museum w Mountain View, Kalifornia.]
Shakey miaģ wbudowaną kamerę telewizyjną do robienia zdjęæ otoczenie, laserowy dalmierz (triangulujący, nie okreķlający czasu) do wykrywania jego odlegģoķci od ķcian i innych obiektów oraz wykrywacze guzów przypominające kocie wąsy. Ķrodowiskiem Shakeya byģa kolekcja "pokoi" drzwiami, ale oddzielonych niskimi ķcianami, które moglibyķmy wygodnie zobaczyæ, ale Shakey nie. Niektóre pokoje zawieraģy duŋe obiekty. Większoķæ programów, które opracowaliķmy w celu kontrolowania Shakey, dziaģaģa na komputerze DEC PDP-10. Między PDP-10 a samym pojazdem mobilnym znajdowaģ się komputer peryferyjny PDP-15 (do obsģugi dolnej poziom komunikacji i poleceņ do sprzętu pokģadowego) oraz dwukierunkowe ģącze radiowe i wideo. Programy PDP-10 byģy zorganizowane w tak zwanej hierarchii "trójwarstwowej". Programy na najniŋszym poziomie napędzaģy wszystkie silniki i przechwycone informacje sensoryczne. Programy na poziomie poķrednim nadzorowaģy prymitywne dziaģania, takie jak przejķcie do wyznaczonej pozycji, a takŋe przetwarzaģy obrazy wizualne z kamery telewizyjnej Shakeya. Planowanie bardziej zģoŋonych dziaģaņ, wymagających wykonania sekwencji poķredniej Dziaģania na tym samym poziomie byģy wykonywane przez programy na najwyŋszym poziomie hierarchii. Projekt Shakey obejmowaģ integrację kilku nowych wynalazków w technikach wyszukiwania, w solidnej kontroli dziaģaņ, w planowaniu i nauce oraz w wizji. Wiele z tych pomysģów jest dziķ powszechnie uŋywanych.
A*: Nowa heurystyczna metoda wyszukiwania
Jednym z pierwszych problemów, które rozwaŋano, byģo zaplanowanie sekwencji "punktów nawigacyjnych", których Shakey mógģ uŋyæ podczas nawigacji z miejsca na miejsce. Aby ominąæ pojedynczą przeszkodę leŋącą między pozycją początkową a pozycją bramkową, Shakey powinien najpierw skierowaæ się w stronę punktu w pobliŋu okludującej granicy przeszkody, a następnie skierowaæ się prosto w kierunku niezakģóconego koņcowego punktu bramkowego. Sytuacja staje się jednak bardziej skomplikowana, jeķli ķrodowisko jest wypeģnione wieloma przeszkodami i szukaliķmy ogólnego rozwiązania tego trudniejszego problemu. Shakey zachowaģ informacje o poģoŋeniu przeszkód i wģasnej pozycji w modelu siatki takim jak ten pokazany poniŋej

(Aby uzyskaæ wymaganą dokģadnoķæ, komórki siatki zostaģy rozģoŋone na mniejsze komórki w pobliŋu obiektów. Myķlę, ŋe byģo to jedno z pierwszych zastosowaņ adaptacyjnego rozkģadu komórek w planowaniu ruchu robota i jest obecnie powszechnie stosowaną techniką.) Wežmy na przykģad pod uwagę problem z nawigacją, w którym Shakey jest w pozycji R i musi podróŋowaæ do G (gdzie R i G są oznaczone zacienionymi kwadratami). Moŋe uŋyæ komputerowej reprezentacji modelu siatki do zaplanowania trasy przed rozpoczęciem podróŋy - ale jak? Mapa pokazuje pozycje trzech obiektów, których naleŋy unikaæ. Obliczenie lokalizacji niektórych kandydujących punktów orientacyjnych w pobliŋu rogów obiektów nie jest trudne. (Punkty te muszą byæ wystarczająco daleko od rogów, aby Shakey nie wpadģ na przedmioty.) Punkty trasy są oznaczone zacienionymi gwiazdami i oznaczone "A", "B" i tak dalej przez "K." Korzystając z technik znanych obecnie w grafice komputerowej, nietrudno jest równieŋ obliczyæ, które punkty nawigacyjne są osiągalne, korzystając z pozbawionej przeszkód prostej linii z dowolnego innego punktu nawigacyjnego oraz od R. i G. Patrząc w ten sposób, problem nawigacji Shakeya jest problemem wyszukiwania, podobnym do tych, o których wspominaģem wczeķniej. Oto, w jaki sposób moŋna zbudowaæ drzewo wyszukiwania, a następnie wyszukaæ najkrótszą ķcieŋkę od R do G. Po pierwsze, poniewaŋ do A i F moŋna bezpoķrednio dotrzeæ pozbawionymi przeszkód, prostymi ķcieŋkami z R, są one ustawione jako potomek bezpoķredni "wezģów" R w drzewie wyszukiwania. Kontynuujemy proces obliczania węzģów potomnych (wzdģuŋ ķcieŋek prostych bez przeszkód) z kaŋdego z A i F i tak dalej, aŋ do drzewa zostanie dodane G. Następnie jest to prosta kwestia, aby zidentyfikowaæ najkrótszą drogę od R do G. Kilka metod przeszukiwania drzew (i ich bardziej ogólnych kuzynów, wykresów) byģo juŋ uŋywanych w poģowie lat 60. XX w. Jednym z argumentów przemawiających za tymi znanymi metodami byģo zagwarantowanie do znalezienia najkrótszych ķcieŋek uŋywanych do rozwiązania problemów nawigacyjnych Shakeya. Mogą one jednak byæ niewykonalne obliczeniowo w przypadku trudnych problemów. Oczywiķcie rozwiązywanie prostych problemów z nawigacją (takich jak na schemacie) nie wymaga duŋego wyszukiwania, więc kaŋda metoda wyszukiwania szybko rozwiązuj takie problemy, ale opanowane metodami ogólnymi, które skutecznie dziaģaģyby na większe, trudniejsze problemy. Znaģem heurystyczną metodę wyszukiwania zaproponowaną przez J. Dorana i Donalda Michie do rozwiązania oķmioczęķciowej ukģadanki z przesuwanymi kafelkami. Przypisali wartoķæ liczbową do kaŋdego węzģa w drzewie wyszukiwania, w oparciu o szacunkową trudnoķæ osiągnięcia celu z tego węzģa. Węzģem o najniŋszym wyniku byģ ten, który zostaģ wybrany obok generowanych potomków. Uznaģem, ŋe dobrym "heurystycznym" oszacowaniem trudnoķci w dostaniu się z pozycji punktu drogi do celu (przed dalszym szukaniem dalej) byģaby "odlegģoķæ linii lotniczej", ignorując wszelkie przeszkody poķrednie, od tej pozycji do celu. Zasugerowaģem, abyķmy wykorzystali tę ocenę jako wynik odpowiedniego węzģa w drzewie wyszukiwania. Bertram Raphael, który wówczas kierowaģ pracą nad Shakey, zauwaŋyģ, ŋe lepszą wartoķcią dla wyniku byģaby suma odlegģoķci przebytej tak daleko od pozycji początkowej plus moje heurystyczne oszacowanie, jak daleko robot musiaģ się posunąæ. Raphael i ja opisaliķmy ten pomysģ Peterowi Hartowi, który niedawno uzyskaģ stopieņ doktora. ze Stanford i doģączyģ do naszej grupy w SRI. Hart wspomina "wracając do domu tego dnia, siedząc na okreķlonym krzeķle i wpatrując się w ķcianę przez ponad godzinę, i dochodząc do wniosku", ŋe jeķli oszacowanie pozostaģej odlegģoķci (cokolwiek by to byģo) nigdy nie byģo większe niŋ faktyczna pozostaģa odlegģoķæ, to zastosowanie takiego oszacowania w naszym nowym schemacie punktacji zawsze znajdowaģoby ķcieŋkę mającą jak najkrótszą odlegģoķæ do bramki. (Oczywiķcie, moja heurystyczna odlegģoķæ linii lotniczej speģniģa bardziej ogólny stan Hart'a.) Ponadto, pomyķlaģ, ŋe taka procedura wygeneruje drzewa wyszukiwania nie większe niŋ jakiekolwiek inne procedury, które gwarantowaģyby równieŋ najkrótsze ķcieŋki i które wykorzystywaģyby oceny heurystyczne nie lepiej niŋ nasz. Razem Hart, Raphael byli w stanie stworzyæ na to dowody ,twierdzi, a wynikowy proces wyszukiwania nazwali "A*". ("A" dotyczyģo algorytmu, a "*" oznaczaģo jego szczególną wģaķciwoķæ znalezienia najkrótszych ķcieŋek. Myķlę, ŋe Hart i Raphael wykonali większoķæ cięŋkiego podnoszenia przy opracowywaniu dowodów.) Kiedy ķcieŋki wiąŋą się z kosztami, które zaleŋą od więcej niŋ tylko odlegģoķæ, a gdy takie koszty (a nie odlegģoķci) są uwzględniane przy obliczaniu wyników, A* gwarantuje ķcieŋki o najniŋszych kosztach. Uwzględnienie oszacowania pozostaģej odlegģoķci (lub kosztu) do celu przyczynia się do poszukiwania w ogólnym kierunku celu. Uwzględnienie dotychczasowego dystansu (lub kosztu) zapewnia, ŋe proces wyszukiwania nie będzie na zawsze prowadzony obiecującymi, ale byæ moŋe daremnymi ķcieŋkami i będzie w stanie "przecinaæ" przeszkody. A* zostaģ przedģuŋony na wiele sposobów {szczególnie Richarda Korfa, aby uczyniæ go bardziej praktycznym, gdy pamięæ komputera jest ograniczona. Obecnie A* jest uŋywany w wielu aplikacjach, w tym w parsowaniu języka naturalnego, obliczaniu wskazówek dojazdu i interaktywnych grach komputerowych.
Solidne wykonanie akcji
Algorytm A* zostaģ osadzony w programach Shakey′a do nawigacji z jednego miejsca do drugiego w pomieszczeniu zawierającym przeszkody i do popychania obiektu z jednego miejsca do drugiego. Programy nawigacyjne wraz z innymi zajmowaģy ķrodkowy poziom w hierarchii programów Shakeya. Te programy na poziomie ķrednim zostaģy zaprojektowane tak, aby osiągnąæ okreķlone cele, takie jak na przykģad postawienie obiektu przed wejķciem. Byli równieŋ doķæ solidni w tym, ŋe "próbowali" nawet w obliczu nieprzewidzianych trudnoķci. Na przykģad, jeķli obiekt, który zostaģ popchnięty, przypadkowo zeķlizgnąģ się z przedniego "paska popychającego", program pchający zauwaŋyģ ten problem (poprzez wbudowane czujniki kontaktowe na pasku popychającym) i przestawiono Shakey, aby mógģ ponownie poģączyæ obiekt i kontynuowaæ pchanie. Myķląc o tym, jak osiągnąæ tę wytrzymaģoķæ, zainspirowaģy mnie zarówno urządzenia TOTE Millera, Galantera i Pribrama, jak i idea homeostazy. (Przypomnij sobie, ŋe jednostka TOTE do wbijania gwoždzi wali, dopóki gwóždž nie zostanie caģkowicie wbity, a systemy homeostatyczne podejmują dziaģania w celu przywrócenia ich stabilnoķci w obliczu postrzeganych zakģóceņ ķrodowiska.) Chciaģem, aby programy na ķrednim poziomie szukaģy i wykonaģy akcję, która byģa zarówno "najbliŋsza" realizacji ich celów, i która faktycznie mogģaby zostaæ wykonana w obecnej sytuacji. Jeķli wykonanie tej akcji doprowadziģoby do sytuacji, w której, zgodnie z przewidywaniami, moŋna by wykonaæ akcję jeszcze bliŋszą osiągnięcia celu, dobrze, program na ķrednim poziomie przynajmniej robiģ postępy. Jeķli nie, lub coķ nieoczekiwanego spowodowaģoby niepowodzenie, następna akcja zostaģaby wykonana w celu powrotu na wģaķciwe tory. Opracowaliķmy z Richardem Dudą format zwany "tabelami Markowa" do pisania programów na poziomie poķrednim posiadających tę wģaķciwoķæ "próbowania"
STRIPS: Nowa metoda planowania
Programy na ķrednim poziomie mogą wykonywaæ szereg prostych zadaņ, takich jak przenoszenie Shakey z jednego miejsca do drugiego w tym samym pokoju, pchanie przedmiotów i przenoszenie Shakey przez drzwi do sąsiedniego pokoju. Jednak przejķcie do jakiegoķ odlegģego pokoju i popchnięcie tam jakiegoķ obiektu w wyznaczone miejsce wymagaģoby poģączenia sekwencji kilku programów na ķrednim poziomie. Tak jak ludzie czasami tworzą, a następnie wykonują plany wykonania swoich zadaņ, chcieliķmy, aby Shakey byģ w stanie opracowaæ plan dziaģaņ, a następnie wykonaæ plan. Plan skģadaģby się z listy programów do wykonania. Informacje potrzebne do planowania zostaģy zapisane w tak zwanym "modelu aksjomatycznym". Ten model zawieraģ logiczne stwierdzenia w języku rachunku predykatów (o którym mówiģem wczeķniej). Na przykģad poģoŋenie Shakeya byģo reprezentowane przez instrukcję taką jak AT (ROBOT, 7,5), fakt , ŋe Box1 jest przesuwalny, byģo reprezentowane przez instrukcję PUSHABLE (BOX1), a fakt, ŋe między drzwiami R1 i R2 istniaģo przejķcie o nazwie D1, reprezentowane byģo przez JOINSROOMS (D1, R1, R2). Model aksjomatów miaģ prawie dwieķcie takich stwierdzeņ i byģ podstawą zdolnoķci rozumowania i planowania Shakeya. Pierwsza próba budowy planów Shakey wykorzystywaģa system dedukcji QA3 i rachunek sytuacji. Poprosilibyķmy QA3 o udowodnienie (przy uŋyciu wersji modelu aksjomat), ŋe istniaģa sytuacja, w której cel Shakeya (na przykģad przebywanie w odlegģym pokoju) byģ prawdziwy. Wynik odliczenia (jeķli się powiedzie) nazwaģby tę sytuację kategorią dziaģania na ķrednim poziomie do wykonania. Wykorzystanie rachunku sytuacyjnego do planowania, jak zestawiaæ dziaģania ķredniego szczebla, przy uŋyciu logicznych instrukcji opisujących wpģyw tych dziaģaņ na sytuacje. Musieliķmy nie tylko opisaæ, w jaki sposób akcja na ķrednim poziomie zmieniģa pewne rzeczy w ķwiecie, ale musieliķmy równieŋ stwierdziæ, ŋe nie zmieniģo to wielu rzeczy. Na przykģad, gdy Shakey pchnąģ obiekt, pozycja tego obiektu w powstaģej sytuacji zostaģa zmieniona, ale pozycje wszystkich innych obiektów nie. To, ŋe większoķæ rzeczy w ķwiecie Shakeya nie ulegģo zmianie, musiaģo zostaæ wyražnie przedstawione jako logiczne stwierdzenia, a co gorsza, uzasadnione przez QA3. Trudnoķæ ta, zwana "problemem z ramką", byģa przedmiotem wielu badaņ w AI, a wiele prób byģo zģagodziæ, jeķli nie rozwiązaæ. Z powodu problemu z ramką QA3 moŋna byģo wykorzystaæ za wykorzystanie najprostszych dwu- lub trzyetapowych planów. Kaŋda próba generowania planów znacznie dģuŋej wyczerpaģoby pamięæ komputera. Problem z rachunkiem sytuacji (tak jak go wówczas uŋywano) polegaģ na tym, ŋe zakģadano, ŋe wszystkie rzeczy mogą się zmieniæ, chyba ŋe zostanie wyražnie stwierdzone, ŋe się nie zmieniģy. Uznaģem, ŋe lepszą konwencją byģoby zaģoŋenie, ŋe wszystkie rzeczy pozostaģy niezmienione, chyba ŋe wyražnie stwierdzono, ŋe się zmieniģy. Aby zastosowaæ taką konwencję, zaproponowaģem inny sposób aktualizacji zbioru instrukcji logicznych opisujących sytuację. Pomysģem byģo to, ŋe pewne fakty, w szczególnoķci te, które miaģy miejsce przed wykonaniem czynnoķci, ale które mogą nie zostaæ utrzymane, powinny zostaæ usunięte, a niektóre nowe fakty, mianowicie te spowodowane przez wykonanie czynnoķci, powinny zostaæ dodane. Wszystkie inne fakty (te, które nie zostaną przeznaczone do usunięcia), naleŋy po prostu skopiowaæ do zbioru opisującego nową sytuację. Oprócz opisania w ten sposób skutków akcji, kaŋdy opis akcji miaģby warunek wstępny, to znaczy stwierdzenie, co musiaģo byæ prawdziwe w sytuacji, aby móc wykonaæ akcję w tej sytuacji. (Rok wczeķniej doktorant Carl Mewitt na MIT opracowywaģ język programowania robotów o nazwie PLANNER, który miaģ mechanizmy dla podobnych rodzajów aktualizacji. Na przykģad, aby opisaæ efekty programu goto (( X1, Y1), (X2, Y2)) w celu przeniesienia Shakey z pewnej pozycji (X1, Y1) na jakąķ pozycję (X2, Y2), naleŋy usunąæ logiczną instrukcję AT (ROBOT, X1, Y1), dodaæ instrukcję AT (ROBOT, X2, Y2) i zachowaj wszystkie pozostaģe instrukcje. Oczywiķcie, aby wykonaæ goto ((X1, Y1), (X2, Y2)), Shakey musiaģby juŋ byæ w pozycji (X1, Y1); to znaczy model aksjomatowy musiaģ zawieraæ warunek wstępny AT (ROBOT, X1, Y1) lub przynajmniej zawieraæ stwierdzenia, z których moŋna udowodniæ AT (ROBOT, X1, Y1).
Mniej więcej w tym czasie (1969) Richard Fikes wģaķnie ukoņczyģ doktorat. Pracuj pod kierunkiem Allena Newella w Carnegie i doģączyģ do grupy w SRI. W rozprawie Fikes′a badano nowe sposoby rozwiązywania problemów przy uŋyciu procedur zamiast logiki, jak w QA3. Razem z Fikes pracowaliķmy nad zaprojektowaniem systemu planowania, który uŋywaģ warunków wstępnych, usuwaģ listy i dodawaģ listy (wszystkie wyraŋone jako logiczne instrukcje) do opisania dziaģaņ. Fikes zasugerowaģ, ŋe wykonując poszukiwanie sekwencji dziaģaņ speģniających cele, system powinien uŋyæ heurystycznej analizy "means-ends" centralnej dla Newell, Shaw i ogólnego problemu rozwiązywania problemów (GPS) Newella, Shawa i Simona. zaczynaģby od zidentyfikowania tych akcji, których listy dodania zawieraģy instrukcje, które pomogģy ustaliæ warunek celu. Warunki wstępne tych dziaģaņ byģyby ustalone jako podzadania, a ten proces rozumowania wstecznego trwaģby do momentu znalezienia sekwencji dziaģaņ, która przeksztaģci początkową sytuacja w jedną speģniającą cel. Okoģo roku 1970 Fikes zakoņczyģo programowanie (w LISP) nowym systemem planowania. Nazwaliķmy go STRIPS, akronimem Solvera Problemford Research Institute. Po jego zakoņczeniu STRIPS zastąpiģ QA3 jako system Shakey do generowania planów dziaģania. Typowe plany skģadające się z okoģo szeķciu dziaģaņ na ķrednim poziomie moŋna wygenerowaæ na PDP-10 w ciągu okoģo dwóch minut. Sam system planowania STRIPS h jako droga do bardziej wydajnych planistów AI, ale wielu z nich nadal opisuje dziaģania w kategoriach tak zwanych "operatorów STRIPS" (czasami "reguģ STRIPS"), które skģadają się z warunków wstępnych, usuņ listy i dodaj listy.
Uczenie się i wykonywanie planów
To jedna rzecz, aby zrobiæ plan, a zupeģnie inna, aby go wģaķciwie wykonaæ. Chcieliķmy teŋ móc zapisaæ plany juŋ opracowane przez STRIPS do ewentualnego wykorzystania w przyszģoķci. Udaģo się stworzyæ strukturę zwaną "tabelą trójkątów" do reprezentowania planów, która byģa przydatna nie tylko do wykonywania planów, ale takŋe do ich zapisywania. (John Munson początkowo zasugerowaģ pogrupowanie warunków i efektów dziaģaņ robota w trójkątny stóģ. Okoģo 1970 roku Munson, Richard Fikes, Peter Hart opracowali formalizm tabeli trójkątów do reprezentowania planów skģadających się z operatorów STRIPS.) Tabela trójkątów warunki wstępne i skutki kaŋdego dziaģania w planie, aby mógģ on ķledziæ, czy plan byģ prawidģowo wykonywany. Dziaģania w planach wygenerowanych przez STRIPS miaģy okreķlone wartoķci dla swoich parametrów. Na przykģad, jeķli jakieķ dziaģanie goto byģo częķcią planu, rzeczywiste wspóģrzędne miejsca zostaģy uŋyte do nazwania miejsca, z którego miaģ się udaæ Shakey, i miejsca, do którego miaģo się udaæ, byæ moŋe goto ((3,7), (8,14 )). Chociaŋ moŋemy chcieæ zapisaæ plan, który zawieraģby ten konkretny goto jako komponent, bardziej ogólnie stosowany plan miaģby komponent goto z niespecyficznymi parametrami, które moŋna by zastąpiæ konkretnymi w zaleŋnoķci od konkretnego celu. Chcielibyķmy uogólniæ coķ takiego jak goto ((3,7), (8,14)), na przykģad goto ((x1, y1), (x2, y2)). Nie moŋna nie chcąc nie chcąc zamieniaæ staģych na zmienne, ale naleŋy upewniæ się, ŋe wszelkie takie uogólnienia skutkują wykonalnymi i wykonalnymi planami dla wszystkich wartoķci zmiennych. Byli w stanie wymyķliæ procedurę, która daģa prawidģowe uogólnienia, i te uogólnione plany byģy reprezentowane w tabeli trójkątów. Po wygenerowaniu, uogólnieniu i przedstawieniu planu w tabeli trójkątów ogólny program wykonawczy Shakey, zwany "PLANEX", nadzorowaģ jego wykonanie. W ķrodowisku, w którym dziaģaģ Shakey, wykonanie planu czasami się zaģamywaģo, ale PLANEX, korzystając z tabeli trójkątów, mógģ zdecydowaæ, jak przywróciæ Shakey z powrotem do pierwotnego celu. PLANEX zapewniģ ten sam rodzaj "ciągģej" odpornoķci na planowanie wykonania, co tabele Markowa dawaģy do wykonywania akcji na ķrednim poziomie.
Procedury wizji Shakey′a
Ķrodowisko Shakeya skģadaģo się z podģogi, po której się poruszaģ, ķcian ograniczających pokoje, drzwi między pokojami i duŋych prostoliniowych przedmiotów na podģodze w niektórych pokojach. Doģoŋono wszelkich staraņ, aby Shakey "ģatwo widziaģ". Ciemna listwa przypodģogowa oddzieliģa jasną podģogę od jasnych ķcian. Obiekty pomalowano na róŋne odcienie czerwieni, które wydawaģy się ciemne dla kamery vidicon i jasne dla dalmierza laserowego na podczerwieņ. Mimo to przetwarzanie wizualne wciąŋ stanowiģo trudne problemy. Zamiast próbowaæ przeprowadziæ peģną analizę scen wizualnych, nasza praca koncentrowaģa się na wykorzystaniu wizji do uzyskania okreķlonych informacji, których Shakey potrzebowaģ do wykonania swoich zadaņ. Informacje te obejmowaģy lokalizację Shakey oraz obecnoķæ i lokalizację obiektów {rodzaj informacji, która byģa wymagana przez dziaģania na ķrednim poziomie. Procedury wizualne sģuŋące do gromadzenia tych informacji zostaģy wbudowane w programy do wykonywania tych dziaģaņ. W tych procedurach wykorzystywano znane wģaķciwoķci ķrodowiska Shakey. Wykorzystując fakt, ŋe obiekty, podģoga i ķciana zawieraģy pģaszczyzny raczej staģego oķwietlenia, Claude Brice i Claude Fennema w naszej grupie opracowali procedury przetwarzania obrazu, które identyfikowaģy regiony o jednolitej intensywnoķci na obrazie. Poniewaŋ oķwietlenie na jednej pģaszczyžnie, powiedzmy twarz obiektu, moŋe zmieniaæ się stopniowo w caģym regionie, rutynowa regionalizacja jako pierwsza identyfikuje raczej maģe regiony. Zostaģy one następnie scalone ponad granicami regionu na obrazie, jeķli zmiana intensywnoķci na granicy nie byģa zbyt duŋa. Ostatecznie obraz zostanie podzielony na kilka duŋych regionów, które wykonaģy rozsądną robotę, reprezentując samoloty na scenie. Granice tych regionów moŋna by następnie wytyczyæ za pomocą odcinków prostych. Inną rutyną wizji byģa moŋliwoķæ bezpoķredniej identyfikacji segmentów prostych na obrazie. Richard Duda i Peter Hart opracowali metodę wykonania tego w oparciu o nowoczesną formę "transformacji Hougha". Po wykryciu krawędzi podczas przetwarzania zidentyfikowano lokalizacje i kierunki maģych odcinków linii, transformacji Hougha uŋyto do skonstruowania dģuŋszych linii, które byģy statystycznie najbardziej prawdopodobne, biorąc pod uwagę maģe odcinki linii jako dowód. Zarówno nding regionu, jak i wykrywanie linii zastosowano w róŋnych obszarach widzenia procedury dla dziaģaņ na ķrednim poziomie. Jedna z tych procedur, zwana obloc, zostaģa uŋyta do okreķlenia poģoŋenia obiektu, którego poģoŋenie byģo znane z grubsza. Zdjęcia pokazują ramkę, jak to wygląda jako obraz telewizyjny z kamery Shakeya i dwa etapy przetwarzania obloka.
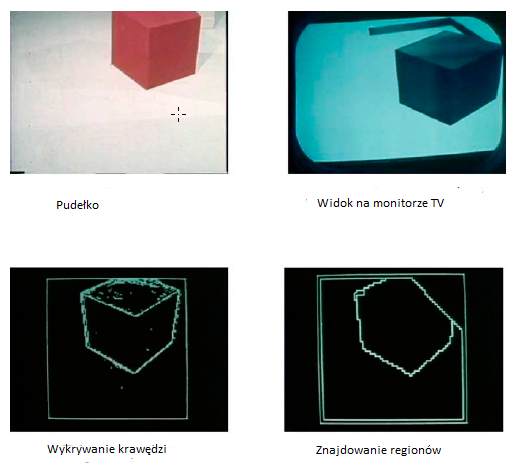
Z obszarów odpowiadających pudeģku i podģodze (i biorąc pod uwagę fakt, ŋe Shakey jest na tej samej podģodze co pudeģko), proste obliczenia geometryczne mogģyby dodaæ pudeģko i jego lokalizację do modeli Shakey. Shakey zwykle ķledziģ swoją lokalizację, licząc martwe rachunki (licząc obroty kóģ), ale szacunki te stopniowo akumulowaģy bģędy. Kiedy Shakey zdecydowaģ, ŋe powinien zaktualizowaæ swoją lokalizację, uŋyģ innej procedury wizji, zwanej picloc. Pobliski "punkt orientacyjny", taki jak róg pokoju, zostaģ uŋyty do aktualizacji pozycji Shakey w odniesieniu do punktu orientacyjnego. Zdjęcia na ryc. 12.7 pokazują, w jaki sposób obloc ķledzi listwę przypodģogową i znajduje obszary odpowiadające ķcianom i podģodze.
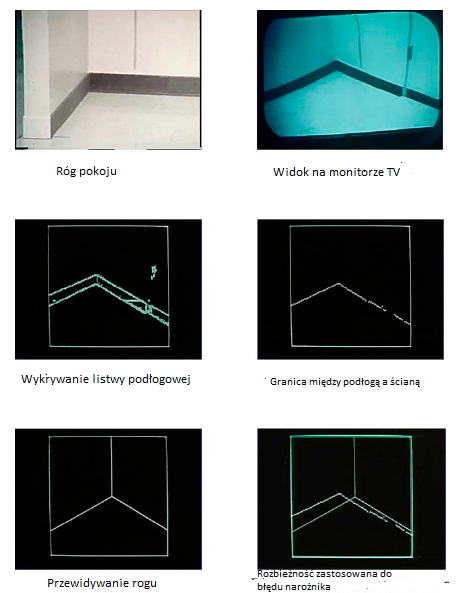
Ostatnie zdjęcie pokazuje rozbieŋnoķæ między przewidywaną przez Shakey lokalizacją rogu (na podstawie oszacowania wģasnej lokalizacji przez Shakey) a faktyczną lokalizacją na podstawie pikloku. Ta rozbieŋnoķæ zostaģa wykorzystana do skorygowania oszacowania pozycji Shakey. Zanim Shakey rozpocząģ prostoliniowy ruch w pokoju, w którym obecnoķæ przeszkód moŋe nie byæ znana, uŋyģ procedury zwanej clearpath, aby ustaliæ, czy jego ķcieŋka jest wolna. Ta procedura sprawdzaģa obraz swojej ķcieŋki na lub (w ksztaģcie trapezu) pod kątem zmian jasnoķci, które mogą wskazywaæ na obecnoķæ przeszkody. Oceniając wydajnoķæ wizualną Shakey, naleŋy zauwaŋyæ, ŋe byģ naprawdę bardzo prymitywny i z zastrzeŋeniem wielu bģędów - nawet w specjalnie zaprojektowanym ķrodowisku Shakey. Jak podaje jeden raport: "Regiony, które chcemy zachowaæ odrębnoķæ {takie jak dwie ķciany spotykające się w rogu - są często ģączone, a fragmenty znaczących regionów, które powinny zostaæ scalone, są zbyt często trzymane oddzielnie." Jeķli chodzi na
przykģad o clearpath, ten sam raport zauwaŋa, ŋe "cienie i odbicia mogą nadal powodowaæ faģszywe alarmy, a jedynym rozwiązaniem niektórych z tych problemów jest wykonanie dokģadniejszej analizy sceny". Niemniej jednak wizja odegraģa waŋną rolę w ogólnej wydajnoķci Shakey, a wiele technik przetwarzania wizualnego opracowanych podczas projektu Shakey jest nadal uŋywanych (z póžniejszymi ulepszeniami)
Niektóre eksperymenty z Shakey
Aby zilustrowaæ metody planowania i realizacji Shakey oraz metody uczenia się w dziaģaniu, stworzono zadanie, w którym Shakey miaģ przepchnąæ okreķlone okno przed okreķlonymi drzwiami w nieprzylegającym pokoju. Aby to zrobiæ, Shakey musiaģ uŋyæ STRIPS, aby zaplanowaæ podróŋ do tego pokoju, a następnie pchnąæ pudeģko. Przed rozpoczęciem realizacji planu Shakey zapisaģ go w uogólnionej formie opisanej wczeķniej. Podczas realizacji planu ustalono, ŋe Shakey napotka nieoczekiwaną przeszkodę. Ilustrując swoją solidną procedurę wykonywania planu, Shakey byģ w stanie znaležæ inną wersję uogólnionego planu, który poprowadziģby go nieco inną drogą do docelowego pomieszczenia, w którym mógģby kontynuowaæ. Jednym z badaczy pracujących nad projektem Shakey byģ L. Stephen Coles, który niedawno uzyskaģ stopieņ doktora. dyplom pod kierunkiem Herb Simon na Carnegie Mellon University zajmujący się przetwarzaniem języka naturalnego. Coles chciaģ daæ Shakeyowi zadania okreķlone w języku angielskim. Opracowaģ parser i system analizy semantycznej, który tģumaczy proste angielskie polecenia na logiczne instrukcje dla STRIPS. Na przykģad, wspomniane zadanie wypychania pudeģka zostaģo dla Shakey po angielsku postawione w następujący sposób:
Uŋyj BOX2, aby zablokowaæ drzwi DPDPCLK z pokoju RCLK.
(BOX2, DPDPCLK i RCLK byģy nazwami, których Shakey uŋywaģ do identyfikacji danego pudeģka, drzwi i pokoju. Byliķmy zobowiązani do uŋywania nazw Shakey do wykonywania zadaņ do wykonania.) Program Colesa o nazwie ENGROB, przetģumaczony to angielskie polecenie do speģniony jest następujący warunek (wyraŋony w języku rachunek predykatów):
ZABLOKOWANE (DPDPCLK, RCLK, BOX2)
Warunek ten zostaģ następnie przekazany STRIPS, aby opracowaæ plan jego osiągnięcia. Coles byģ równieŋ zainteresowany tym, aby Shakey rozwiązaģ problemy wymagające poķredniego rozumowania. Zaģoŋyģ eksperyment, w którym Shakey miaģ zepchnąæ pudģo z podwyŋszonej platformy. Aby to zrobiæ, musiaģby się zorientowaæ, ŋe będzie musiaģ zepchnąæ rampę na platformę, zwinąæ rampę, a następnie pchnąæ pudģo. To zadanie zostaģo powierzone Shakey po angielsku jako "Push box, który jest na platformie na podģogę". Zadanie zostaģo pomyķlnie wykonane i opisane w jednym z raportów technicznych Shakey. Zadanie "zepchnięcia pudeģka z platformy" byģo sposobem Colesa na pokazanie, ŋe Shakey moŋe rozwiązaæ problemy takie jak problem z maģpami i bananami. Problem ten, rozsģawiony przez Johna McCarthy′ego jako przykģad rozumowania dedukcyjnego, dotyczyģ maģpy, pudeģka i niektóre z bananów wiszących poza zasięgiem. Maģpa miaģa byæ w stanie zrozumieæ, ŋe aby zdobyæ banany, musiaģby wepchnąæ pudeģko pod banany, wspiąæ się na pudeģko, a następnie zģapaæ banany. Mówi się, ŋe McCarthy sģyszaģ, jak Karl Lashley podczas sympozjum Caltech Hixon w 1948 r. Opisuje podobny problem z demonstrowaniem inteligentnego rozwiązywania problemów przez szympansy. Jedną z osób, które byģy pod wraŋeniem Shakey, byģ Bill Gates, który póžniej byģ wspóģzaģoŋycielem Microsoft. Widziaģ Shakey lm w 1972 roku jako gimnazjalista i pojechaģ z Seattle do SRI (wraz z Paulem Allenem, który byģ drugim wspóģzaģoŋycielem Microsoftu), aby się przyjrzeæ. Wedģug jednego ze žródeģ byģ "szczególnie podekscytowany tym, ŋe Shakey porusza się po okolicy, ŋeby mógģ wejķæ na rampę"
Shakey wpada w kģopoty z finansowaniem
Shakey byģ pierwszym systemem robotów posiadającym umiejętnoķci planowania, rozumowania i uczenia się; postrzegaæ otoczenie za pomocą czujników wizyjnych, zasięgowych i dotykowych; i do monitorowania realizacji swoich planów. Byæ moŋe byģo to nieco przed czasem. Potrzebne byģoby znacznie więcej badaņ (i ogólnie postęp w technologii komputerowej), zanim praktyczne zastosowania robotów o takich umiejętnoķciach byģyby moŋliwe. W jednym z raportów o Shakey′u wspomniano o niektórych ograniczających zaģoŋeniach przyjętych w tym czasie przez projekty badawcze robotów:
"Zazwyczaj ķrodowisko problemowe [dla robota] jest nudnym rodzajem miejsca, w którym pojedynczy robot jest jedynym czynnikiem zmieniającym - nawet czas stoi w miejscu, dopóki robot się nie poruszy. Sam robot ģatwo się myli; nie moŋna podaæ drugiego problemu, dopóki nie rozwiąŋe pierwszego, nawet jeķli oba problemy mogą byæ powiązane w jakiķ intymny sposób. Wreszcie, większoķæ systemów robotów nie moŋe jeszcze wygenerowaæ planów zawierających wyražne instrukcje warunkowe lub pętle."
Mimo ŋe badacze SRI mieli wielkie plany kontynuowania pracy nad Shakey, DARPA odmówiģa, a projekt zakoņczyģ się w 1972 r. Zakoņczenie to byģo niefortunne, poniewaŋ prace nad planowaniem, widzeniem, uczeniem się i ich integracją z systemami robotów osiągnęģy wiele rozmach i entuzjazm wķród badaczy SRI. Ponadto badano kilka nowych pomysģów dotyczących planowania i percepcji wizualnej. Wiele z nich zostaģo szczegóģowo opisanych w koņcowym raporcie dla projektu Shakey. Spoķród tych pomysģów szczególnie waŋna byģa technika konstruowania planów w sposób hierarchiczny. Aby to zrobiæ, najpierw musi zostaæ utworzony ogólny plan skģadający się tylko z dziaģaņ wysokiego poziomu. Taki plan moŋna znaležæ przy znacznie mniejszym wyszukiwaniu niŋ jeden skģadający się ze wszystkich potrzebnych dziaģaņ na najniŋszym poziomie. Na przykģad plan uzyskania pracy moŋe potrzebowaæ tylko decyzji o ježdzie metrem lub kierowaniu samochodem. Stopniowo plan wysokiego poziomu musi byæ coraz bardziej szczegóģowo dopracowany, aŋ do podjęcia dziaģaņ na najniŋszym poziomie (np. jaki zestaw kluczy samochodowych powinien zostaæ wykorzystany) w koņcu zostaģby zaatakowany. Student Stanford, pracujący w SRI, Earl Sacerdoti, zaproponowaģ dwie nowatorskie metody planowania hierarchicznego. Po pierwsze (w ramach pracy magisterskiej) zaprogramowaģ system który nazwaģ ABSTRIPS. Skģadaģ się on z szeregu aplikacji STRIPS {począwszy od ģatwego do skomponowania planu, który ignorowaģ wszystkie oprócz najwaŋniejszych warunków wstępnych operatora. Rezultatem byģa seria coraz bardziej szczegóģowych planów, których kulminacją byģ plan, który moŋna faktycznie zrealizowaæ. Dla jego doktoratu, podczas pracy Sacerdoti opracowaģ potęŋniejszy system planowania hierarchicznego, który nazwaģ NOAH (ang. Nets of Action Hierarchies). W przeciwieņstwie do ABSTRIPS, których operatory akcji byģy na tym samym poziomie szczegóģowoķci (choæ z warunkami, które moŋna selektywnie zignorowaæ), NOAH zastosowaģ operatory akcji na kilku poziomach szczegóģowoķci. Kaŋdy operator jest wyposaŋony w specyfikacje, w jaki sposób mogą zostaæ opracowane przez operatorów na niŋszym poziomie szczegóģowoķci. Co więcej, przedstawienie planu przez NOAH, w formie Sacerdoti zwanej "siecią proceduralną", "pozwoliģo na nieokreķlonoķæ co do kolejnoķci wykonywania kroków planu na jednym poziomie. To" opóžnione zobowiązanie "dotyczące zamówienia pozwoliģo na bardziej szczegóģowe kroki opracowania nieuporządkowanych planów na jednym poziomie, które mają byæ przeplatane na niŋszym poziomie, często z konsekwentną poprawą ogólnej wydajnoķci. Sacerdoti liczyģ na wykorzystanie swoich pomysģów dotyczących planowania hierarchicznego w projekcie Shakey, więc on i reszta z SRI byli bardzo rozczarowani ŋe DARPA nie zamierza wesprzeæ kolejnego projektu (podstawowe badania nad robotami byģy jedną z ofiar nacisku DARPA na prace nad aplikacjami, które rozpoczęģy się na początku lat 70.). Jednak udaģo nam się namówiæ DARPA na projekt, który miaģ oczywiste znaczenie wojskowe, ale nadal pozwalaģ nam kontynuowaæ prace nad automatycznym planowaniem, wizją i realizacją planu. Co ciekawe, projekt byģ wģaķciwie kontynuacją badaņ nad Shakiem ale z czģowiekiem wykonującym zaplanowane zadania zamiast robota. Nazwano to "projektem konsultanta komputerowego (CBC)".Sacerdoti i badacze SRI nie byli sami w rozpoznawaniu i znaczeniu planowania hierarchicznego. W ramach swojego doktoratu pracując na uniwersytecie w Edynburgu, Austin Tate opracowywaģ sieciowy system planowania o nazwie INTERPLAN. W latach 1975 i 1976, wspierany przez British Science Research Council, Tate i koledzy z badaņ operacyjnych stworzyli hierarchicznego planistę o nazwie NONLIN . Planista wziąģ swoją nazwę od faktu, ŋe podobnie jak NOAH, niektóre kroki planu pozostaģy nieuporządkowane, dopóki nie zostaģy opracowane na niŋszych poziomach hierarchii. Inne systemy planowania wyrosģy z tradycji NOAH i NONLIN. Jednym z nich byģ interaktywny system generowania i wykonywania planu SIPE-2 opracowany przez Davida E. Wilkinsa z SRI International35. Kolejnym byģ O-PLAN opracowany przez Tate i wspóģpracowników z Artiialial Intelligence Applications Institute (AIAI) na University of Edynburg Te systemy zostaģy szeroko stosowane, rozszerzone i stosowane.
Wózek Stanforda
Na początku lat 60. James Adams, absolwent inŋynierii mechanicznej w Stanford (a póžniej profesor Stanford), zacząģ eksperymentowaæ z czterokoģowym wózkiem mobilnym z kamerą telewizyjną i ģączem radiowym. Lester Earnest napisaģ (w swojej historii kilku projektów wykorzystujących ten wózek) "
Między innymi Adams pokazaģ w swojej rozprawie, ŋe z opóžnieniem komunikacji odpowiadającym podróŋy w obie strony na Księŋyc (okoģo 2 sekund) pojazdu nie da się niezawodnie kontrolowaæ jeķli podróŋuje z prędkoķcią większą niŋ okoģo 0,2 km / h (0,3 km / h). "
Po tym jak Earnest doģączyģ do Stanford AI Laboratory, on i Rodney Schmidt, doktor inŋynierii elektrycznej, otrzymaģ ulepszoną wersję wózka, aby "podąŋaæ za biaģą linią o wysokim kontraķcie [na drodze wokóģ laboratorium] w kontrolowanych warunkach oķwietleniowych z prędkoķcią okoģo 0,8 mil na godzinę (1,3 km / h)". Inni absolwenci AI równieŋ eksperymentowali z wózkiem od czasu do czasu na początku lat siedemdziesiątych. Kiedy Hans Moravec przyjechaģ do Stanford, aby kontynuowaæ doktorat studiując nawigację wizualną, rozpocząģ pracę z wózkiem, "ale doznaģ niepowodzenia w paždzierniku 1973 r., kiedy wózek spadģ z rampy zjazdowej pod kontrolą ręczną i skoņczyģ z kwasem akumulatorowym w caģej elektronice". W 1979 roku Moravec dostaģ odnowiony wózek, teraz wyposaŋony w system wizyjny stereo, do przejķcia przez zagracony pokój bez interwencji czģowieka. Ale robiģo to bardzo powoli. Wedģug Moravca system byģ niezawodny dla krótkich serii, ale powolny. "Wózek poruszaģ się 1 m co 10-15 minut koģysząc się na boki. Po przejechaniu z metr zatrzymaģ się, zrobiģ kilka zdjęæ i dģugo o nich myķlaģ. Potem zaplanowaģ nową ķcieŋkę, wykonaģ jej trochę i znów się zatrzymaģ. Z powodzeniem przejechaģ wózek przez kilka 20-metrowych torów (kaŋdy zajmuje okoģo 5 godzin) na tyle skomplikowanych, ŋe wymagaģo to trzech lub czterech unikanie skrętów; w innych próbach zawiodģo w odkrywaniu sposobów. Wraz z Shakey'em wózek Stanforda znajduje się w Muzeum Historii Komputerów w Mountain View w Kalifornii. Byģy one prekursorami dģugiej linii pojazdów-robotów