Przetwarzanie sygnaġu cyfrowego (DSP)
Wszyscy ludzie praktykujḟ przetwarzanie sygnaġu cyfrowego (DSP) codziennie. Moṡe to zaskoczyæ, ale to prawda. Co wiêcej, bardzo niewielu ludzi zna prostḟ teoriê, którḟ praktykujḟ kaṡdego dnia instynktownie. W tym rozdziale omówimy teoriê i odniesiemy jḟ do przykġadów z ṡycia wziêtych. Najpierw, szybko sprawdỳmy, jak funkcjonuje DSP. Wiêkszo¶æ prawdziwego ¶wiata jest analogowa, a nie cyfrowa. Robot bêdzie musiaġ patrzeæ na sygnaġy wszelkiego rodzaju. Sygnaġy te muszḟ byæ dostêpne dla komputera sterujḟcego, aby moṡliwe byġo prawidġowe przetwarzanie. Rysunek 8-1 pokazuje, w jaki sposób moṡna to zrobiæ. Przetwornik analogowo-cyfrowy (A / D) digitalizuje analogowe sygnaġy wej¶ciowe. Cyfrowe reprezentacje sygnaġów trafiajḟ nastêpnie do komputera, gdzie sḟ przetwarzane zgodnie z potrzebḟ aplikacji. Komputer moṡe nastêpnie wysyġaæ cyfrowe wyniki, z których niektóre mogḟ napêdzaæ konwerter cyfrowo-analogowy (D / A), który generuje sygnaġy analogowe dla wyj¶cia. Kaṡdy element tego ġañcucha elektroniki sġuṡy do modyfikowania informacji z oryginalnych sygnaġów na róṡne sposoby. Omówimy charakterystykê kaṡdego bloku na rysunku w dalszej czê¶ci rozdziaġu, ale na razie, po prostu u¶wiadom sobie, ṡe komputer nie widzi sygnaġów analogowych przez caġy czas. Moṡe tylko okresowo je próbkowaæ z A / D, i nie ma pojêcia, co sygnaġy robiḟ miêdzy próbkami. Podamy gġówne twierdzenie stosowane w DSP, a nastêpnie zademonstrujemy, ṡe znamy juṡ twierdzenie i uṡywamy go instynktownie kaṡdego dnia.

Twierdzenie o próbkach Nyquista-Shannona
Nie moṡemy uchwyciæ istoty zdigitalizowanego sygnaġu bez próbkowania go z czêstotliwo¶ciḟ dwukrotnie wiêkszḟ niṡ czêstotliwo¶æ sygnaġu. Innymi sġowy, musimy próbkowaæ sygnaġ dwa razy szybciej niṡ komponent o najwyṡszej czêstotliwo¶ci w sygnale.
FILTR OCHRONNY
Aby pomy¶lnie przetestowaæ sygnaġ, musimy najpierw go zmieniæ, aby odfiltrowaæ wszystkie skġadowe czêstotliwo¶ci, które sḟ powyṡej poġowy czêstotliwo¶ci próbkowania. Czêstotliwo¶æ na poziomie 50 procent czêstotliwo¶ci próbkowania jest równieṡ nazywana czêstotliwo¶ciḟ Nyquist. Rozpoczynamy dyskusjê o tym, co dalej oznacza aliasing. Stwierdzenia te sḟ uproszczeniami oryginalnego twierdzenia. Sprawdỳ dokġadniejsze adresy URL pod koniec tej sekcji. Wiêc gdzie uṡywamy caġej tej teorii matematycznej w naszym codziennym ṡyciu? Oto jeden dla czytelników z dzieæmi. Nikt nie zwraca uwagi na dzieci. Nie moṡna tego zrobiæ, poniewaṡ zabiera to zbyt duṡo energii, a ponadto ciḟgġe po¶wiêcanie uwagi uczy ich niczego. Zamiast tego, próbujemy ich zachowania okresowo, sġuchajḟc ich. Czêsto odwracamy gġowy, przykġadamy uszy do sġuchania i mówimy: "Ojej, tam jest za cicho". Dziwnie, z dzieæmi, caġkowity brak danych jest sygnaġem, ṡe co¶ jest nie tak. To byġ ġatwy przykġad. Oto trudniejszy. Rozwaṡmy nastêpujḟcy eksperyment - nie rób tego naprawdê. Gdy jeste¶ pasaṡerem, wyobraỳ sobie, ṡe jedziesz i zwracasz uwagê na drogê. Przejedỳ ulicḟ obok dġugiego rzêdu zaparkowanych samochodów. Przy staġej prêdko¶ci mijaj zaparkowany samochód co sekundê. Nie moṡna oglḟdaæ kaṡdego samochodu na sekundê. Prawdḟ jest, ṡe próbujemy drogi naprzód naszymi oczami. Oto pytanie. Jak czêsto musimy próbowaæ zaparkowanych samochodów, aby czuæ siê
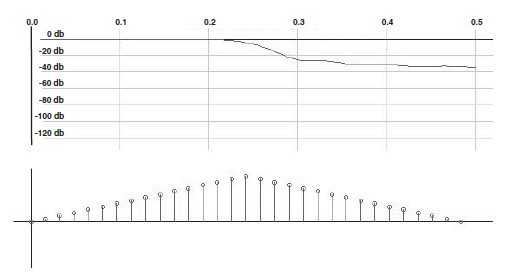
komfortowo podczas jazdy przez nich z takḟ prêdko¶ciḟ? Pamiêtaj, ṡe przejeṡdṡamy obok jednego samochodu na sekundê. Zaġóṡmy, ṡe zamykamy oczy i otwieramy je tylko na krótko z ustalonḟ czêstotliwo¶ciḟ próbkowania. Jak czêsto musimy je otwieraæ, aby czuæ siê komfortowo? Cóṡ, aby siê spowiadaæ, próbowaġem tego gġupiego eksperymentu. To trochê jak lekarz wstrzykujḟcy sobie zarazki, ṡeby przetestowaæ swojḟ nowḟ szczepionkê. Zrobiġem to jednak bezpiecznie. Oto mój raport. Zamkniêcie moich oczu byġo bardzo niewygodne i nie próbowaġem tego zbyt dġugo, czego z pewno¶ciḟ moṡna siê byġo spodziewaæ. Otwarcie oczu raz na sekundê byġo niewygodne. Widziaġem kaṡdy samochód tylko raz, gdy go mijaġem. Otwieranie oczu dwa razy na sekundê byġo wygodniejsze, poniewaṡ czuġem, ṡe mogê wġa¶ciwie sterowaæ samochodem. W tym eksperymencie do¶wiadczyġem na wġasne oczy twierdzenia o próbkowaniu. Aby wġa¶ciwie obserwowaæ samochody, musiaġem próbowaæ samochodów dwa razy na sekundê w sytuacji, gdy samochody jechaġy raz na sekundê. Krytycy tego eksperymentu mogḟ powiedzieæ: "To ¶wietnie, ale co by byġo, gdyby szybkobieṡny samochód wypadġ z bocznej ulicy? Czy to nie moṡe spowodowaæ wypadku? "Odpowiedỳ brzmi: tak. Próbkowanie moṡe nie dziaġaæ prawidġowo, je¶li na ulicy pojawi siê niespodziewany samochód. Gdyby¶my mieli szczê¶cie, zauwaṡyliby¶my szybki samochód, gdy nasze oczy byġyby otwarte i mogliby¶my tego uniknḟæ. Prawdopodobnie nie byliby¶my w stanie powiedzieæ, jak szybko siê to odbywaġo. W najgorszym przypadku nigdy nie zobaczymy szybkiego samochodu; pojawiġoby siê i uderzyġoby nas, gdy nasze oczy pozostaġyby zamkniête. Kluczem jest tutaj filtr antyspamowy, który w naszym przykġadzie byġby znakiem ograniczenia prêdko¶ci. Plani¶ci miast automatycznie chroniḟ ciche boczne ulice (te z rzêdami zaparkowanych samochodów), otaczajḟc okolicê znakami ograniczenia prêdko¶ci. Dlatego szybko poruszajḟce siê pojazdy sḟ odfiltrowywane. Gdyby szybko poruszajḟce siê samochody byġy normḟ w sḟsiedztwie, byliby¶my na straṡy i czê¶ciej próbowali drogi. Instynktownie reagujemy, stosujḟc w ten sposób Twierdzenie o próbkowaniu. Podsumujmy eksperyment przeprowadzania w kategoriach DSP. Samochody sḟ napêdzane z róṡnymi prêdko¶ciami; to sḟ nasze sygnaġy wej¶ciowe. Aby zabezpieczyæ nasz system pobierania próbek, wprowadzili¶my filtr antyaliasingu (znaki ograniczenia prêdko¶ci), aby¶my nie musieli radziæ sobie z samochodami poruszajḟcymi siê szybciej niṡ jedna samochód na sekundê. Przejeṡdṡajḟc obok zaparkowanych samochodów z prêdko¶ciḟ jednego samochodu na sekundê, wizualnie próbujemy samochody dwa razy na sekundê. Zgodnie z twierdzeniem o próbkowaniu daje to nam wystarczajḟcḟ ilo¶æ informacji do przetwarzania danych i do prowadzenia pojazdu ostroṡnie. Spróbujmy innego eksperymentu. Bêdziemy uṡywaæ czystych fal sinusoidalnych jako sygnaġów wej¶ciowych do systemu DSP i bêdziemy próbkowaæ ze staġḟ prêdko¶ciḟ co 0,3 sekundy. To dziaġa z czêstotliwo¶ciḟ próbkowania równḟ 3,33 Hz lub okoġo 20 radianów na sekundê. Bêdziemy zmieniaæ czêstotliwo¶æ analogowych sygnaġów wej¶ciowych z 3 do 15 radianów na sekundê. Przy staġej czêstotliwo¶ci próbkowania wynoszḟcej 20 radianów na sekundê, Twierdzenie o próbowaniu przewiduje, ṡe wykonamy dobrḟ robotê próbkowania sygnaġów wej¶ciowych fali sinusoidalnej o czêstotliwo¶ciach rzêdu 10 radianów na sekundê. Patrzḟc na fale sinusoidalne od 3 do 15 radów na sekundê, powinni¶my zaobserwowaæ zaġamanie w ukġadach pobierania próbek powyṡej 10 radianów na sekundê. Ostatecznie wyeliminowali¶my filtr antyaliasingu z systemu DSP, aby zilustrowaæ problemy, które mogḟ wystḟpiæ przy jego braku. Powinni¶my spodziewaæ siê problemów. Spójrz na dowody na poniṡszych rysunkach. Kaṡda para wykresów pokazuje wej¶ciowḟ falê sinusoidalnḟ na górze i próbkê wyniku na dole. Te wykresy zostaġy wykonane w arkuszu kalkulacyjnym, który próbowaġ dopasowaæ krzywḟ do próbkowanych danych na dole. Przebieg w ten sposób odtworzony z danych próbki jest pokazany na dole kaṡdego wykresu. Reprezentuje to, co komputer DSP uwaṡa za oryginalny przebieg. Pobieranie próbek przebiegaġo do¶æ dobrze od 3 do 9 radianów. Patrzḟc na rysunek
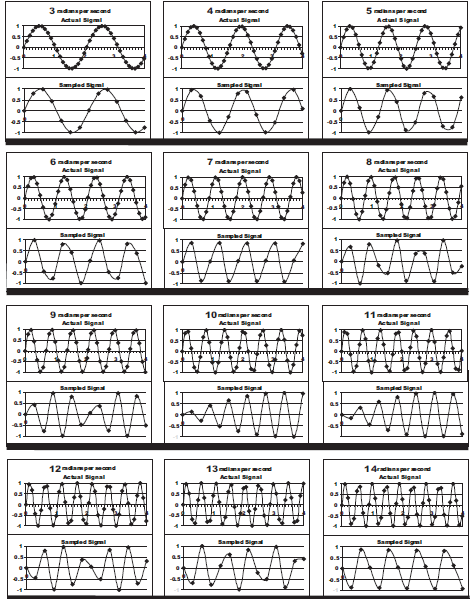
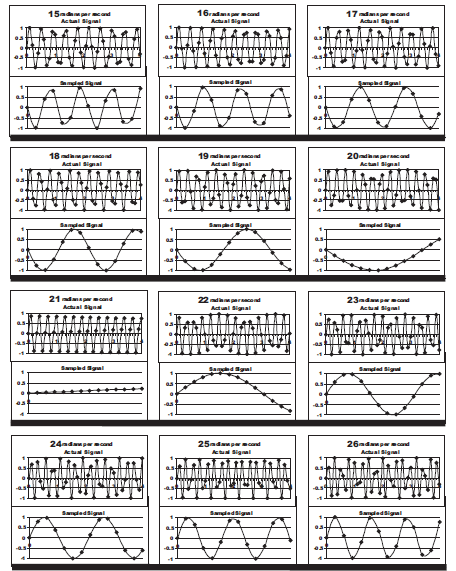
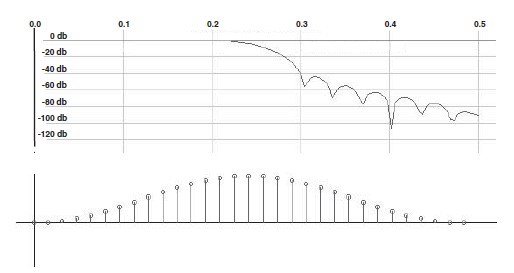
jest oczywiste, ṡe oprogramowanie nie moṡe wykryæ czêstotliwo¶ci (lub ksztaġtu) wej¶ciowych fal sinusoidalnych o czêstotliwo¶ciach powyṡej 10 radianów na sekundê, ale pojawia siê co¶ innego. Próbkowany ksztaġt fali wyglḟda coraz bardziej jak sygnaġ o niskiej czêstotliwo¶ci. Spójrz na to, co dzieje siê na rysunku 8-3, poniewaṡ rozszerzamy wykresy znacznie powyṡej 15 radianów na sekundê sygnaġu wej¶ciowego. Próbkowane ksztaġty fali wydajḟ siê zmniejszaæ w zakresie od 16 do 21 radianów na sekundê, a nastêpnie ponownie zwiêkszaæ czêstotliwo¶æ miêdzy 21 a 26 radianów na sekundê. System próbkowania uwaṡa, ṡe rzeczywisty ksztaġt fali robi co¶, czego nie robi. To klasyczne wygġaszanie na naszych oczach. System pobierania próbek jest oszukiwany. Alias, zgodnie z definicjḟ w sġowniku Webstera, jest "przybranym nazwiskiem". Próbkowana, zrekonstruowana fala z prêdko¶ciḟ 16 radianów na sekundê wyglḟda jak fala o czêstotliwo¶ci tylko dwóch uġamków na tej samej czêstotliwo¶ci. Reprezentuje siebie jako co¶, czym nie jest, stḟd nazwa alias. Wszyscy widzieli¶my, ṡe taki sam efekt ma miejsce w przypadku kóġ samochodowych. W nocy, pod ṡarzḟcymi siê ¶wiatġami, spójrz na koġpaki jadḟcego samochodu, który zatrzymuje siê do zatrzymania. Wybierz samochód z wieloma szprychami w koġpaku. Poniewaṡ moc elektryczna wynosi 60 Hz (lub 50 Hz w innym miejscu), ¶wiatġa elektryczne migajḟ na tej czêstotliwo¶ci. Ḋwiatġa skutecznie próbkujḟ szprych koġpaków dla naszych oczu. Widzimy tylko koġpaki, gdy ¶wiatġa sḟ najja¶niejsze. Gdy samochód zwalnia z duṡych prêdko¶ci, koġpaki wydajḟ siê zwalniaæ do zera, zanim samochód siê zatrzyma. Nastêpnie, gdy samochód nadal zwalnia, koġpaki wydajḟ siê ruszaæ do tyġu. Jest to dokġadnie ten sam efekt, który
wġa¶nie widzieli¶my na naszych wykresach dotyczḟcych aliasingu. Aby uniknḟæ oszukania komputera DSP w ten sam sposób, zwracaj szczególnḟ uwagê na Twierdzenie o próbkowaniu. Niech próbka komputera bêdzie dwa razy wyṡsza niṡ czêstotliwo¶æ sygnaġów wej¶ciowych. Ponadto umie¶æ filtr antyaliasingu na wej¶ciu D / A, który odfiltrowuje wszystkie czêstotliwo¶ci powyṡej poġowy czêstotliwo¶ci próbkowania. Wobec tak wielkich teoretyków, jak Nyquist i Shannon, czujê siê dziwnie z powodu wprowadzenia pewnych praktycznych szczegóġów do tej dyskusji. Niestety, musi to byæ zrobione. Ḋwiat jest trudnym miejscem, Grasshopper, i nie moṡna wylaæ ogólników bez wpadania w kġopoty. Wiêc trzymaj swój nos; oto olej rycynowy! Procesor DSP polega na transformacji danych, aby moṡna je byġo przetwarzaæ i wykorzystywaæ z dobrym skutkiem. Problem w tym, ṡe wiêkszo¶æ transformacji znieksztaġca dane po drodze. Zanim zaczniemy pracê z DSP, stwierdzimy, ṡe filtry antyalergiczne i A / D zmieniajḟ dane w sposób, który naleṡy dokġadnie uwzglêdniæ. Ponadto, gdy procesor DSP i D / A wejdḟ do gry, zobaczymy, ṡe one równieṡ znieksztaġcajḟ dane. Bardzo ġatwo jest uderzyæ A / D i D / A w komputer i nazwaæ go systemem DSP. Trudno¶æ polega na tym, aby postrzegaæ ¶wiat poprawnie i pomagaæ mu podejmowaæ wġa¶ciwe decyzje. Oto kilka istotnych szczegóġów, które naleṡy wziḟæ pod uwagê.
Konwersja A / D
Nie bêdziemy dyskutowaæ o typach konwerterów A / D, które sḟ dostêpne, ani teṡ my omówimy, jak dziaġajḟ. Pozostawiamy to czytelnikowi, aby zagġêbiæ siê w te szczegóġy, w tym koszt i liniowo¶æ. Pamiêtaj tylko, ṡe musi byæ wystarczajḟco szybki, aby nadḟṡyæ za czêstotliwo¶ciḟ próbkowania wybranḟ zgodnie z Twierdzeniem o próbkowaniu. Musimy przeprowadziæ dyskusjê na temat liczby bitów w A /
D. Przede wszystkim musimy zdaæ sobie sprawê, ṡe podstawowḟ cechḟ przetwornika A / D jest zwykle liczba bitów na wyj¶ciu cyfrowym. Uwaṡaj na A / D, które majḟ wiele bitów. Nie jest niczym niezwykġym, ṡe A / D nie osiḟga poziomu raportowanego. Wiêc nawet je¶li A / D nagrywa 16 bitów rozdzielczo¶ci, moṡe dostarczyæ tylko równowaṡnḟ wydajno¶æ 12 lub 14 bitów. Wydaje siê oczywiste, ṡe sygnaġ z rzeczywistego ¶wiata nie moṡe byæ dobrze reprezentowany przez zaledwie 2 lub 3 bity danych. Ale ile bitów naprawdê potrzebujemy? Najpierw musimy zdefiniowaæ db lub decybel. Ten akronim ma wiele zastosowañ, z których kaṡdy ma swojḟ wġasnḟ definicjê. Tutaj przyjmiemy to jako metodê pomiaru stosunków napiêciowych. Sygnaġ napiêciowy, który jest o 6 dB mniejszy niṡ inny, to zaledwie 50 procent drugiego. Zwiêkszenie napiêcia o 6 dB podwaja go. W podobny sposób 20 dB oznacza wspóġczynnik równy 10. Gġównḟ kwestiḟ przy rozpatrywaniu dġugo¶ci bitów A / D jest charakter sygnaġów wej¶ciowych. Jaki stosunek sygnaġu do szumu (S / N) majḟ sygnaġy? Wszystkie sygnaġy majḟ na nich szum. Niektóre sygnaġy majḟ znacznie wiêcej niṡ inne. Je¶li sygnaġ jest okoġo 10 razy wiêkszy niṡ haġas, to wynosi 20 dB S / N. Rysunek pokazuje wizualnḟ reprezentacjê szumu przy róṡnych stosunkach S / N.
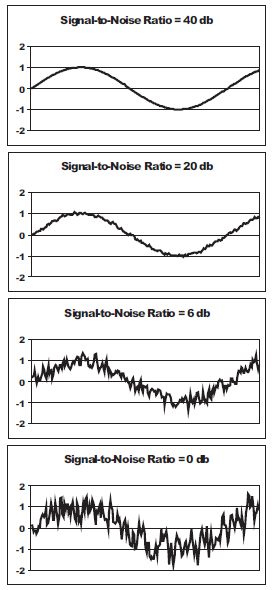
Waṡne jest, aby znaæ stosunek S / N mierzonych sygnaġów. Zasadḟ jest, ṡe kaṡdy dodatkowy bit w A / D zapewnia kolejne 5 dB zdolno¶ci S / N w silniku DSP. Zwykle inny bit podwoiġby efektywny zakres sġowa i tym samym zapewniġby 6 dB zdolno¶ci S / N, ale eksperci twierdzili, ṡe nie spodziewajḟ siê teoretycznego limitu, wiêc licz na 5 db na bit. Teraz je¶li mierzony sygnaġ ma stosunek S / N 40 dB, to 8-bitowy A / D moṡe byæ tylko biletem od 8 x 5= 40. Tak dġugo, jak zwiêkszenie do kilku bitów nie jest zbyt kosztowne, rozwaṡaġbym 10-bitowy A / D dla takiej pracy. Zakup 16-bitowego A / D nie zapewni ṡadnej dodatkowej dokġadno¶ci z tak niskim sygnaġem S / N. Zazwyczaj 16-bitowe A / D moṡe pozwoliæ na 80 db przetwarzania S / N (5 x 16), ale je¶li sygnaġy wej¶ciowe nie sḟ do tej liczby, nie ma sensu próbowaæ wiêcej. Generalnie uṡyj A / D, który jest nieco lepszy niṡ sygnaġy, które musi zmierzyæ. Oto nasz pierwszy quiz popowy! Je¶li sygnaġy majḟ stosunek S / N 60 dB, to ile bitów rozdzielczo¶ci ma A / D? Powinien mieæ co najmniej 12 bitów. Obliczenie wynosi 60 db / 5 db / bit = 12 bitów.
A / D Dithering
Przetworniki A / D nie sḟ idealne. Zamieniajḟ sygnaġy analogowe na cyfrowe reprezentacje oryginalnego sygnaġu. Je¶li pierwotny sygnaġ jest bardzo pġynnie zmieniajḟcym siê sygnaġem, wówczas cyfryzacja sygnaġu moṡe dodaæ znaczny szum do sygnaġu. To wchodzi w grê w co najmniej dwóch sytuacjach:
• Czasami sam A / D bêdzie miaġ trudno¶ci z przekraczaniem wiêkszych bitowych granic. Zaġóṡmy na przykġad, ṡe uṡywamy 16-bitowego A / D i ṡe sygnaġ przekracza granicê z 7FFFH do 8000H. Liczba 7FFFH jest zapisana w zapisie szesnastkowym (podstawa 16) . Wiele bitów zmienia siê w tym samym czasie, a A / D moṡe mieæ problemy z utrzymaniem takiej samej dokġadno¶ci, jak tylko przej¶cie z 7FFEH na 7FFFH.
• Wystêpuje równieṡ bġḟd kwantyzacji. Bez wzglêdu na to, A / D moṡe reprezentowaæ sygnaġ wej¶ciowy tylko z dokġadno¶ciḟ okre¶lonḟ przez liczbê bitów w A / D. W pġynnie zmieniajḟcym siê sygnale wej¶ciowym efekty te stajḟ siê zauwaṡalne. Efekt ten jest najczê¶ciej widoczny w obrazach graficznych; oko ludzkie jest bardzo skuteczne w wybieraniu wzorców bġêdów w pġynnie zmieniajḟcych siê obrazach.
Aby przeciwdziaġaæ tym efektom, sygnaġ losowy jest dodawany do sygnaġu wej¶ciowego. Ten dithering sygnaġu wej¶ciowego jest zwykle wystarczajḟca do rozmycia wspomnianych wcze¶niej szkodliwych efektów. Dithering moṡna dodaæ na wiele sposobów:
• Szum analogowy Moṡemy po prostu umie¶ciæ ỳródġo szumu na wej¶ciu A / D. Wielko¶æ ỳródġa haġasu powinna byæ równa wielko¶ci szumu kwantyzacji. Je¶li zakres A / D wynosi 10 woltów, a jest to 10- bitowe A / D, to jednokrotna zmiana w cyfrowym wyj¶ciu A / D pokrywa 10V / 210? 10 mv. Dodanie ỳródġa szumu 10 mv do wej¶cia sygnaġu analogowego stworzy rodzaj wymaganego ditheringu. Uṡywanie ỳródġa haġasu wiêkszego niṡ 10 mv równieṡ dziaġaġoby kosztem niṡszej rozdzielczo¶ci.
bull; Losowe przesuwanie Jednym ze sposobów obej¶cia niedoskonaġo¶ci A / D jest dynamiczne (i losowe) przesuniêcie zakresu A / D. Losowe napiêcie moṡna dodaæ do wej¶cia A / D, a nastêpnie odjḟæ cyfrowo od wyj¶cia A / D. Caġy sprzêt do konwersji dziaġa w ten sposób na losowych poziomach w zakresie roboczym. Strona opisujḟca tê metodê to www.chipcenter.com/TestandMeasurement/tn024.html.
• Szum cyfrowy Moṡna go dodaæ do wyj¶cia A / D. Ta technika jest prawdopodobnie najġatwiejsze do wykonania i moṡna to zrobiæ za pomocḟ sprzêtu lub procesora DSP
Próbka i wstrzymanie (S / H)
Wej¶cia analogowe mogḟ siê zmieniaæ, gdy sḟ próbkowane. Nawet po odfiltrowaniu komponenty o wysokiej czêstotliwo¶ci w filtrze antialiasingu, dane wej¶ciowe do A / D mogḟ siê zmieniaæ, gdy A / D wykonuje swojḟ funkcjê. Niektóre przetworniki A / D mogḟ zostaæ odrzucone przez zmieniajḟce siê wej¶cie, dostarczajḟc bġêdne dane wyj¶ciowe. Je¶li konwerter A / D musi mieæ stabilne wej¶cie podczas procesu konwersji, to sam konwerter ma na ogóġ wzmacniacz próbkujḟcy i podtrzymujḟcy (S / H) wbudowany w konwerter A / D. Je¶li nie, bêdziemy musieli dodaæ jeden przed wej¶ciem A / D. Wzmacniacz S / H posiada wej¶cie wstrzymania, które steruje funkcjḟ wstrzymania. Niski poziom sygnaġu wyj¶ciowego wzmacniacza S / H nastêpuje po wprowadzeniu. Gdy jest wysoka, wykonuje szybkie migawkê analogowej warto¶ci wej¶ciowej S / H i zamraṡa wyj¶cie wzmacniacza S / H na tej warto¶ci. S / H utrzymuje tê warto¶æ wystarczajḟco dġugo, aby A / D przeksztaġciġ jḟ w warto¶æ cyfrowḟ. Sprawdỳ sekcje aplikacji i wskazówki dotyczḟce akwizycji.
Filtry antyaliasingu
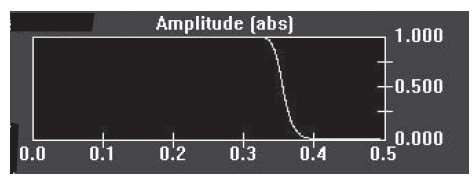
Teraz, gdy mamy jaki¶ pomysġ, co musi znajdowaæ siê w bloku A / D w naszym systemie DSP, a co z filtrem antyaliasowym? Cóṡ, wiadomo¶ci tutaj sḟ nawet nieco trudniejsze. Po chwili stwierdzili¶my, ṡe filtr antyaliasowy powinien byæ filtrem dolnoprzepustowym, filtrujḟcym wszystkie czêstotliwo¶ci powyṡej czêstotliwo¶ci Nyquista. Idealny filtr antyalergiczny przejdzie wszystkie czêstotliwo¶ci (nietkniête) do czêstotliwo¶ci Nyquista. Powyṡej tego punktu przerwania filtr antyaliasowy nie powinien nic przekazywaæ. Rysunek pokazuje odpowiedỳ filtru w funkcji czêstotliwo¶ci. Widzimy, ṡe
filtr doskonale przechodzi wszystkie sygnaġy o niṡszej czêstotliwo¶ci niṡ 0,5 x Fs, czêstotliwo¶æ próbkowania, która w tym przykġadzie wynosi 0,5. Powyṡej tego punktu filtr nic nie przechodzi. Ten wykres jest typowym wykresem odpowiedzi czêstotliwo¶ciowej dla komponentu. Problem polega na tym, ṡe nie moṡna zbudowaæ filtra, który mógġby to zrobiæ. Musimy pój¶æ na kompromisy, aby uzyskaæ odpowiedni projekt filtru antyalergicznego. Jakie problemy wystêpujḟ przy projektowaniu idealnego filtra?
KOSZT
Nie moṡna stworzyæ idealnego filtra antyalergicznego z nieskoñczenie stromym zwojem (zdefiniowanym krótko), jak na rysunku. Filtry sḟ wykonane z komponentów ¶wiata rzeczywistego, które majḟ ostateczne, zġoṡone impedancje. Oznacza to, ṡe filtr bêdzie miaġ funkcjê transferu, która redukuje siê do równañ róṡniczkowych za pomocḟ rozwiḟzañ ciḟgġych. To wszystko jest skomplikowanym sposobem stwierdzenia, ṡe na wykresie przenoszenia czêstotliwo¶ci filtra nie bêdḟ wy¶wietlane pionowe linie przesuniêcia. Filtr musi mieæ krzywe i rampy. Pionowe zrzuty pokazane w idealnym filtrze bêdḟ musiaġy zej¶æ z mniejszym pionowym spadkiem. Im bardziej pionowy spadek, tym droṡszy i bardziej skomplikowany musi byæ filtr. To stawia nas w wiḟzaniu. Je¶li chcemy bardziej idealnego filtra, nasz koszt ro¶nie. Je¶li chcemy zaoszczêdziæ pieniḟdze, bêdziemy musieli zadowoliæ siê mniej doskonaġym filtrem. Typowym rozwiḟzaniem jest umieszczenie filtru przeciwzbijalnego na czêstotliwo¶ci nieco niṡszej niṡ czêstotliwo¶æ Nyquista i zrolowanie jej ġagodniejszym (tañszym) kḟtem. Bardzo podobnym rozwiḟzaniem jest umieszczenie niedoskonaġego filtru antyalergicznego na czêstotliwo¶ci Nyquist, a nastêpnie przesuniêcie czêstotliwo¶ci próbkowania o okoġo 20 procent. Wkrótce przyjrzymy siê projektowi filtra.
ZNIEKSZTA£CENIE
Sam filtr antialias znieksztaġci sygnaġy, które próbujemy zmierzyæ. Dzieje siê tak, poniewaṡ wiêkszo¶æ sygnaġów jest mieszankḟ róṡnych przebiegów czêstotliwo¶ci. Tylko czyste fale sinusoidalne zawierajḟ przebiegi jednofazowe. Nawet czysty sygnaġ fali sinusoidalnej zostanie znieksztaġcony przez filtr, ale sygnaġy skġadajḟce siê z kilku przebiegów czêstotliwo¶ci bêdḟ bardziej znieksztaġcone, poniewaṡ róṡne czêstotliwo¶ci sḟ traktowane w róṡny sposób przez filtr. Przekonamy siê, ṡe nawet znieksztaġcenie moṡe byæ wykorzystane na naszḟ korzy¶æ, je¶li moṡna przewidzieæ znieksztaġcenie. Przez lata projektowanie filtrów antyalergicznych opieraġo siê na kilku dobrych rozwiḟzaniach, z którymi mogḟ ṡyæ projektanci. Dobry filtr bêdzie miaġ stromy zej¶cie i gġêbokie pasmo zaporowe
SPADEK
Spadek to nachylenie charakterystyki czêstotliwo¶ciowej pomiêdzy pasmem przepuszczania i ogranicznikiem. Ze wzmacniaczem operacyjnym i kilkoma komponentami, takimi jak cewka i kondensator, moṡna uzyskaæ roll-out o 12 dB / oktawê. Oznacza to, ṡe przy kaṡdym podwojeniu czêstotliwo¶ci filtr tġumi sygnaġy o wspóġczynnik 4.
PASMO ZAPOROWE
W przypadku filtra antyaliasingu dolnoprzepustowego, pasmo zaporowe obejmuje te wyṡsze czêstotliwo¶ci, które filtr dolnoprzepustowy ma wyeliminowaæ. Ograniczenie to obszar po prawej stronie krzywej przesuniêcia, który jest znacznie niṡszy niṡ czê¶æ krzywej o niskiej czêstotliwo¶ci. Zasadniczo, je¶li wspóġczynnik S / N dla sygnaġów o warto¶ci 40 db, chcieliby¶my caġy rzeczywisty szum o wysokiej czêstotliwo¶ci w ograniczniku powinien wynosiæ 40 dB lub wiêcej w pa¶mie zaporowym
FILTRY ANALOGOWE
Jednym z prostych sposobów wykonania filtra antyaliasingu jest tradycyjna analogowa elektronika. Przy niewielu komponentach analogowych moṡliwe jest uzyskanie filtra z przyzwoitym spadkiem i pasmem zaporowym Rysunek
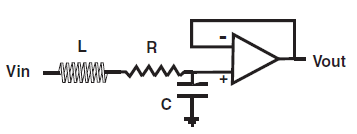
pokazuje schemat prostego filtra drugiego rzêdu i funkcji transferu, która siê z nim wiḟṡe. L jest indukcyjno¶ciḟ, C jest pojemno¶ciḟ, a R jest oporem. Posġugujḟc siê teraz notacjami Laplace'a, równanie róṡniczkowe dla tego obwodu wyprowadza siê w nastêpujḟcy sposób:
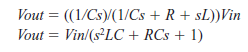
Funkcja transferu zostaġa przedstawiona na rysunku
Zwój tego obwodu wynosi 12 db na oktawê. Poniewaṡ ten konkretny obwód odskakuje w nieskoñczono¶æ, ogranicznik powinien znajdowaæ siê znacznie poniṡej poziomu szumu sygnaġu wej¶ciowego (a zatem nie wspóġczynnika). Powinni¶my zauwaṡyæ, ṡe równanie róṡniczkowe tego obwodu jest bardzo podobne do ukġadu sterowania drugiego rzêdu, którego badanie przeprowadzono w czê¶ci 2 dotyczḟcej ukġadów sterowania. Dzieje siê tak dlatego, ṡe istniejḟ bezpo¶rednie analogie miêdzy typami komponentów w nastêpujḟcy sposób:
• Kondensatory sḟ analogiem masy. Podobnie jak energia jest magazynowana w masie, gdy zyskuje prêdko¶æ, tak samo energia jest przechowywana w kondensatorze, gdy elektrony wpġywajḟ do niego, a napiêcie wzrasta.
• Dġawiki sḟ analogiem sprêṡyn. Induktory, podobnie jak sprêṡyny, dziaġajḟ jak element magazynujḟcy energiê. Prḟd porusza siê przez cewkê indukcyjnḟ, tworzy pole wokóġ cewki indukcyjnej i wytwarza na niej napiêcie. Tak jak sprêṡyna moṡe siê wyczerpaæ, tak teṡ cewka moṡe wyczerpaæ magnetyczne materiaġy, które absorbujḟ energiê pola wokóġ cewki indukcyjnej. Dopóki ilo¶æ energii jest przechowywana w cewce indukcyjnej pozostaje poniṡej pewnej ilo¶ci, bêdzie dziaġaæ poprawnie. To samo dotyczy ỳródġa.
• Rezystory sḟ analogiem tarcia. Rezystor, podobnie jak tarcie, dziaġa, aby spowolniæ i odprowadziæ ruch energii miêdzy dwoma pozostaġymi elementami w obwodzie.
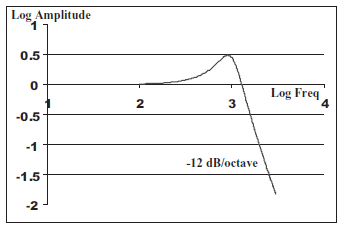
Odpowiedỳ filtra na wej¶cie krokowe pokazano na rysunku
Krzywa powinna wyglḟdaæ bardzo znajomo, poniewaṡ jest praktycznie identyczna z ukġadem sterowania drugiego rzêdu, o którym mówili¶my wcze¶niej. Obwód mógġby byæ uṡywany do napêdzania wzmacniacza serwomechanizmu, ale pozostawiamy to czytelnikom, aby dowiedzieæ siê, biorḟc pod uwagê R, L i C, jak znaleỳæ warto¶ci staġej tġumienia d i czêstotliwo¶ci v. To nie jest nasza sprawa tutaj, aby uṡyæ tego obwodu do czegokolwiek innego niṡ filtr antyaliasowy. Biorḟc pod uwagê nasz przykġad systemu o wspóġczynniku S / N 40 dB i uṡywajḟc tego konkretnego obwodu jako filtra antyalergicznego, moṡemy zobaczyæ, jakie kompromisy moṡemy mieæ w projekcie naszego systemu pobierania próbek:
• Je¶li mamy filtr analogowy drugiego rzêdu z dryftem 12 db na oktawê, potrzebujemy wiêcej niṡ 3 oktawy, aby osiḟgnḟæ poṡḟdany spadek dla antyaliasingu:
(3 okatwy x 12 db/oktawê + 4 db) = 40 db
Aby uzyskaæ pasmo zaporowe do 40 db na czêstotliwo¶ci Nyquista z tym filtrem, musieliby¶my zwiêkszyæ czêstotliwo¶æ próbkowania o wspóġczynnik okoġo 10 (3 oktawy +).
• Je¶li poġḟczymy dwa takie filtry analogowe, uzyskamy 24 db na jeden oktawê, a to bêdzie tylko co¶ mniej niṡ 2 oktawy, aby osiḟgnḟæ takie same wyniki:
(2 okatwy x 24 db/oktawê - 8 db) = 40 db
Aby obniṡyæ stopê o 40 dB z czêstotliwo¶ciḟ Nyquista z tym filtrem, musieliby¶my zwiêkszyæ czêstotliwo¶æ próbkowania o okoġo 3,7: (2 oktawy -). Byġby to dobry kompromis, poniewaṡ filtry analogowe sḟ stosunkowo niedrogie, a filtry DSP mogḟ byæ drogie, w zaleṡno¶ci od zastosowanej technologii.
• Je¶li poġḟczymy 3 takie filtry analogowe, uzyskamy 36 db na jednḟ oktawê, a to bêdzie tylko co¶ wiêcej niṡ 1 oktawa, aby osiḟgnḟæ te same wyniki:
(1 oktawa x 36 db/oktawê + 4 db_ = 40 db
Aby uzyskaæ pasmo zaporowe obniṡajḟce 40 db na czêstotliwo¶ci Nyquista z tym filtrem, musieliby¶my zwiêkszyæ czêstotliwo¶æ próbkowania o wspóġczynnik 2,1 lub wiêcej: (1 oktawa +). To teṡ byġby dobry kompromis.
FILTRY DSP
Nie ma powodu, aby nie stosowaæ filtra antyaliasowego za pomocḟ technik DSP. Omówimy teraz, jak zsyntetyzowaæ filtr DSP.
Efekty D / A: Kompensacja Sinc
Na wyj¶ciu ukġadu DSP, D / A generuje strumieñ wyj¶ciowy warto¶ci analogowych. D / A wyprowadza tylko seriê warto¶ci analogowych, które wyglḟdajḟ jak prostokḟtne schody o staġym napiêciu. W ten sposób D / A z natury zmienia sygnaġ wyj¶ciowy za pomocḟ funkcji sinc, którḟ omówimy wkrótce. W filtrze DSP potrzebny jest filtr wyrównawczy antysynchroniczny. Ten filtr wstêpnej kompensacji antisinc moṡe znajdowaæ siê wewnḟtrz silnika obliczeniowego DSP. Powiedzmy, ṡe silnik obliczeniowy DSP generuje warto¶ci wyj¶ciowe D / A z prêdko¶ciḟ N na sekundê. Obliczenia antysinc sḟ teraz dodawane na koñcu silnika obliczeniowego DSP. To, jak to siê robi, zaleṡy od projektanta. Poniewaṡ zakġada siê, ṡe wszystkie te systemy sḟ liniowymi ukġadami czasu, filtr antisinc moṡna po prostu dodaæ w samym ¶rodku obliczeñ DSP. Poprzednie wyniki D / A sḟ podawane do nowego bloku obliczeniowego, który wykonuje obliczenia dla kompensacji antisinc. Wynikiem tego jest nowy blok obliczeniowy, generujḟcy strumieñ warto¶ci D / A z szybko¶ciḟ wiêkszḟ niṡ szybko¶æ N. Moduġ D / A bêdzie wówczas dziaġaġ z wiêkszḟ szybko¶ciḟ niṡ normalnie. Wygġadzamy warto¶ci D / A za pomocḟ prostego filtra dolnoprzepustowego z zegarem D / A. Wynikowy przebieg wyj¶ciowy nie bêdzie nadmiernie znieksztaġcony przez efekt sinc. Zauwaṡ, ṡe szybsze dziaġanie D / A bêdzie oznaczaæ wyṡsze zuṡycie energii.
Projektowanie filtra DSP
Filtry DSP sḟ silnikami, które robiḟ dokġadnie to: przetwarzajḟ sygnaġy cyfrowe. Filtry DSP przetwarzajḟ dane cyfrowe w uporzḟdkowany sposób. Procesor DSP moṡna zrealizowaæ w sprzêtowej macierzy programowalnej (FPGA) lub przetwarzanie moṡe odbywaæ siê w oprogramowaniu. Nawet komputer ogólnego przeznaczenia moṡe wykonywaæ obliczenia DSP. Filtry DSP to konstrukcja matematyczna, która moṡe byæ realizowana na róṡne sposoby fizyczne. Najpierw omówimy strukturê matematycznḟ i fizycznḟ implementacjê w osobnej sekcji. Dopóki nie dojdziemy do tej sekcji, ṡadna z poniṡszych dyskusji nie odnosi siê do konkretnych fizycznych implementacji. Jest to dyskusja w kategoriach matematycznych. Filtry DSP przetwarzajḟ strumieñ cyfrowy reprezentujḟcy sygnaġ. Strumieñ danych zostanie ponownie obliczony w skoordynowany sposób, aby utworzyæ strumieñ wyj¶ciowy filtra. To charakter obliczeñ nadaje filtrowi DSP poṡḟdanḟ funkcjê przenoszenia czêstotliwo¶ci. Filtry DSP mogḟ byæ zbudowane na wiele sposobów, ale istnieje kilka standardowych sposobów budowania takiego filtra. Standardowy filtr DSP jest zdefiniowany przez jego strukturê: ogólna sekwencja operacji arytmetycznych wykonywanych w wej¶ciowym strumieniu danych. Aby utworzyæ niestandardowy filtr,
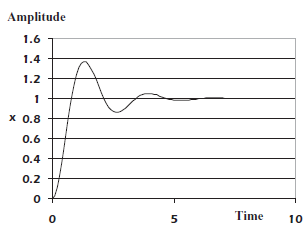
projektanci biorḟ standardowy filtr DSP i modyfikujḟ go. Narzêdzia i formuġy przeksztaġcajḟ niestandardowḟ funkcjê transferu filtra w zestaw zmian standardowego filtru DSP. Zmiany, gdy zostanḟ wprowadzone, zmieniajḟ standardowy filtr DSP w filtr niestandardowy. Aby faktycznie utworzyæ niestandardowy filtr, projektanci mapujḟ zarówno standardowy filtr DSP, jak i niestandardowe modyfikacje fizycznej implementacji. Jednḟ z prostszych standardowych struktur dla filtra DSP jest filtr odpowiedzi na skoñczonḟ odpowiedỳ impulsowḟ (FIR) . Sekwencje danych w liniowej serii rejestrów zwanych kranami. Przy kaṡdym zegarze próbkowania dane przesuwajḟ siê do nastêpnego dotkniêcia. Po ostatnim dotkniêciu dane sḟ odrzucane. Wyj¶cie filtra FIR przy kaṡdym zegarze jest generalnie pojedynczym elementem danych utworzonym przez poġḟczenie wszystkich danych we wszystkich odczepach. Dane w kaṡdym dotkniêciu sḟ mnoṡone przez wspóġczynnik tego kranu, a wyniki sḟ sumowane w celu uzyskania danych wyj¶ciowych. To wektor wspóġczynników przeksztaġca standardowḟ strukturê DSP FIR w niestandardowy filtr FIR. Gdy projektanci zdecydujḟ, ṡe niestandardowy filtr FIR moṡe zostaæ zbudowany ze standardowḟ strukturḟ FIR (proces do omówienia póỳniej), kilka zadañ projektowych pozostaje innych niṡ generowanie wspóġczynników. Wspóġczynniki dla filtru FIR moṡna zaprojektowaæ na wiele sposobów. Aby opisaæ wszystkie metody, potrzebowaliby¶my caġej kolejnej ksiḟṡki. Zamiast tego opiszemy prawdopodobnie najprostszy, najbardziej ogólny sposób zaprojektowania filtru FIR. Technika wykorzystuje transformaty Fouriera i technikê zwanḟ okienkowanie. Nie bêdziemy dokġadnie wiedzieæ, dlaczego ta technika dziaġa, ale raczej jak to dziaġa. Technika jest ogólna, poniewaṡ umoṡliwia zbudowanie filtra o arbitralnej funkcji przenoszenia czêstotliwo¶ci. Projektant moṡe opisaæ niestandardowḟ odpowiedỳ czêstotliwo¶ciowḟ (w granicach), a nastêpnie zastosowaæ techniki. W praktyce wiêkszo¶æ filtrów ma bardzo specyficzne funkcje, a nastêpujḟce cztery filtry to najczê¶ciej uṡywane projekty. Rysunek
przedstawia filtry dolnoprzepustowe, górnoprzepustowe, pasmowo-przepustowe i ograniczajḟce pasmo:
• Dolnoprzepustowy Filtr dolnoprzepustowy przeznaczony jest do eliminowania czêstotliwo¶ci powyṡej czêstotliwo¶ci odciêcia filtra. Przede wszystkim czêstotliwo¶æ odciêcia i tġumienie odciêcia charakteryzujḟ filtr. Jest powszechnie stosowany do eliminowania szumów o wysokiej czêstotliwo¶ci lub jako filtr antyaliasowy.
• Górnoprzepustowy. Filtr górnoprzepustowy przeznaczony jest do eliminowania czêstotliwo¶ci poniṡej czêstotliwo¶ci odciêcia filtru. Przede wszystkim czêstotliwo¶æ odciêcia i tġumienie odciêcia charakteryzujḟ filtr. Jest powszechnie stosowany do eliminacji szumu 60 Hz w systemach lub do akcentowania komponentów wysokiej czêstotliwo¶ci w kanaġach audio.
• Przesuw pasmowy Filtr pasmowoprzepustowy jest przeznaczony do tġumienia wszystkich czêstotliwo¶ci z wyjḟtkiem czêstotliwo¶ci w wḟskim pa¶mie. Filtr charakteryzuje siê przede wszystkim dwiema potrzebami (poczḟtek pasma i koñca pasma) oraz tġumieniem odciêcia.
• Ogranicznik pasma. Filtr ograniczajḟcy pasmo ma za zadanie tġumienie wszystkich czêstotliwo¶ci w wḟskim pa¶mie. Filtr charakteryzuje siê przede wszystkim dwiema czêstotliwo¶ciami (poczḟtkiem pasma i koñca pasma) oraz tġumieniem odciêcia.
Podej¶cie Fouriera do projektowania filtra FIR rozpoczyna siê od wymaganego ksztaġtu funkcji przenoszenia filtra. Cztery poprzednie filtry sḟ przykġadami, a my pójdziemy naprzód z przykġadem dolnoprzepustowym. Poniṡsza matematyka ma charakter ogólny i dotyczy dowolnej funkcji transferu filtra (w okre¶lonych granicach). Przytoczone póỳniej adresy URL pozwalajḟ projektantom na okre¶lenie parametrów filtru i rozpoczêcie obliczeñ. Obliczenia wykonywane na stronach internetowych uṡywajḟ matematyki podobnej do matematyki, którḟ opiszemy dalej. Z zastrzeṡeniem warunków, odpowiedỳ czêstotliwo¶ciowa prostego filtru moṡe byæ umieszczona w ogólnej formie:

gdzie N bêdzie liczbḟ klikniêæ w filtrze FIR. c (n) stanie siê wspóġczynnikiem n-tego dotkniêcia. Lub przez matematycznḟ substytucjê,

Wykre¶lenie wspóġczynnika c (n) z tego wzoru moṡe wiḟzaæ siê z pewnym trudnym rachunkiem z caġkḟ w zakresie 2 pensów. Dzieje siê tak w przypadku ogólnej odpowiedzi czêstotliwo¶ciowej (niestandardowej), ale je¶li krzywa odpowiedzi czêstotliwo¶ci jest podobna do filtra dolnoprzepustowego, obliczenia sḟ prostsze. Wzmocnienie jest pġaskie o warto¶ci 1, a nastêpnie caġkowicie spada (w idealnym równaniu matematyki). Korzystajḟc z uproszczonego ksztaġtu filtra i z kilku innych operacji matematycznych, integracja zmniejsza siê do zamkniêtego rozwiḟzania matematycznego w nastêpujḟcy sposób:

Korzystanie z toṡsamo¶ci matematycznej sinc (x) = sin (x) / x,

Funkcja sinc jest dobrze znana jako obwiednia widmowa ciḟgu impulsów. Wykres
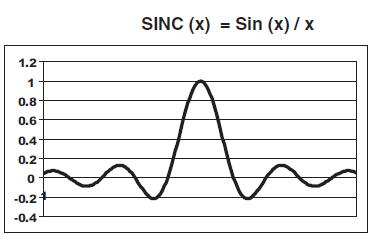
pokazuje ksztaġt funkcji sinc. Jednḟ z trudno¶ci metody Fouriera jest to, ṡe wytwarza on nieskoñczony zbiór wspóġczynników. Stanowi to problem, poniewaṡ nie moṡemy mieæ nieskoñczonej liczby stukniêæ w filtrze FIR. Je¶li po prostu wyeliminujemy niektóre klikniêcia, filtr nie bêdzie dziaġaġ zgodnie z zaġoṡeniami lub symulacjḟ. Zamiast tego stosuje siê róṡne techniki w celu zminimalizowania kranów do wygodnie maġej liczby. Te techniki tworzḟ warto¶æ okna dla kaṡdego wspóġczynnika w nieskoñczonej serii. Wszystkie wspóġczynniki sḟ mnoṡone przez okno podczas obliczeñ filtra FIR. Wszystkie te okna ograniczajḟ liczbê wspóġczynników do ṡḟdanej liczby stukniêæ, poniewaṡ okno ma warto¶æ zero dla dotkniêæ poza zakresem okna. Oznacza to, ṡe filtr FIR moṡe byæ ograniczony do okre¶lonej liczby stukniêæ opartych na oknie. Wiêkszo¶æ tych okien utrzymuje centralne zaczepy (generalnie o najwiêkszych wspóġczynnikach) i zmniejsza rozmiar okna do zera, gdy osiḟga wspóġczynniki krawêdzi. Okna majḟ dobrze znane nazwy i przewidywalne efekty na filtrze. Sḟ one automatycznie dodawane do obliczeñ, poniewaṡ okno musi byæ uṡywane do obliczeñ. Nastêpujḟce adresy URL pozwalajḟ nam wykonywaæ obliczenia przy uṡyciu narzêdzi JAVA. Majḟ wbudowane okna narzêdzia Java, które oblicza wspóġczynniki i pokazuje wynikowḟ funkcjê transferu filtra. Kaṡde okno ma swojḟ moc i sġabe strony, ale musimy wybraæ okno dla kaṡdego obliczenia. Niektóre okna sḟ tutaj opisane. W kaṡdym przypadku pokazujemy ksztaġt okna. Dodatkowo pokazujemy filtr FIR zbudowany z tymi samymi parametrami, z wyjḟtkiem wyboru typu okna.
• Okno prostokḟtne Okno prostokḟtne po prostu ustawia kaṡdḟ warto¶æ okna na 1 wokóġ ¶rodkowego wspóġczynnika. Jest to prawdḟ w stosunku do krawêdzi filtra. Poza filtrem wszystkie wspóġczynniki wyzerowane sḟ z okna. Wykres okna ma charakterystyczny prostokḟtny ksztaġt. Prostokḟtne okno jest ġatwe do obliczenia w locie, poniewaṡ wymagane jest tylko mnoṡenie przez jedno¶æ. Wiêkszo¶æ wspóġczynników filtru FIR jest jednak wstêpnie obliczona w fazie projektowania.
• Okno Bartletta (trójkḟtne) Okno trójkḟtne po prostu ustawia kaṡdḟ warto¶æ okna na liniowo malejḟcḟ warto¶æ, zaczynajḟc od ¶rodkowego wspóġczynnika. Tuṡ przy brzegu filtra osiḟga zero. Poza filtrem wszystkie wspóġczynniki wyzerowane sḟ z okna. Karta okien ma charakterystyczny trójkḟtny ksztaġt
• Okno Hanninga Okno to sġuṡy do implementacji filtra podniesionej cosinus które omówimy póỳniej
• Okno Hamminga Jest to niewielka modyfikacja okna Hanning
• Okno Blackmana Podobnie jak w oknach Hamminga i Hanninga, okno Blackmana ma dodatkowy termin, który redukuje têtnienia
Fizyczna implementacja filtrów DSP
Jak wspomnieli¶my wcze¶niej, wszystkie techniki DSP, o których wspomnieli¶my, majḟ charakter matematyczny.
FILTRY FIR
Fizyczna implementacja ukġadów wygġadzania i ditheringu, niezaleṡnie struktura filtra FIR jest teoretyczna: seria rejestrów, wspóġczynników i sumatorów, które tworzḟ wynik arytmetyczny. Obliczenia DSP moṡna wykonaæ za pomocḟ sprzêtu lub oprogramowania. W wiêkszo¶ci przypadków obliczenia moṡna wykonaæ w dowolny sposób.
Oprogramowanie
Ci z nas, którzy budujḟ sprzêt do ṡycia, mogḟ odnosiæ siê do frustracji, je¶li chodzi o oprogramowanie DSP. W jaki¶ sposób programi¶ci DSP czujḟ, ṡe odpowiedzi DSP po prostu unosiæ siê w powietrzu, obliczenia nie sḟ zakġócane przez obecno¶æ sprzêtu lub elektronów. Prawda jest taka, ṡe komputery DSP to bardzo hardcorowy sprzêt, specjalnie zaprojektowany do obliczeñ DSP. Omówili¶my wcze¶niej komputery DSP w ksiḟṡce, wiêc nie bêdê wchodziġ w strukturê. Ukġady DSP sḟ specjalnie zaprojektowane, aby skutecznie radziæ sobie z typami obliczeñ wymaganych dla filtrów FIR. Specyficzne struktury logiczne w DSP mogḟ byæ uṡywane jako ciḟg rejestrów FIR i rejestrów wspóġczynników. Struktury sḟ równieṡ wykorzystywane do efektywnego przenoszenia danych przez ukġad DSP tak szybko, jak to moṡliwe. Programi¶ci DSP mogḟ korzystaæ z wielu funkcji bibliotecznych. Wdroṡenie prostego filtru FIR moṡna osiḟgnḟæ po prostu okre¶lajḟc liczbê stukniêæ i wspóġczynników. Kompilator DSP zajmuje siê resztḟ pracy.
Sprzêt komputerowy
Cóṡ, wystarczajḟco duṡo ratuje ludzi oprogramowania i sprzêtu. Smutna prawda jest taka, ṡe potrzebujemy siebie nawzajem. Nawet czysta sprzêtowa implementacja filtrów FIR wymaga duṡej ilo¶ci oprogramowania i programowania. Proporcjonalne implementacje filtrów FIR sḟ dostêpne, ale nie sḟ powszechne. Najczê¶ciej stosowane sḟ w ukġadach scalonych specyficznych dla aplikacji (ASIC) lub FPGA. Ukġad FPGA zawiera wiele rejestrów i elementów logicznych, które moṡna skonfigurowaæ za pomocḟ oprogramowania. Oprogramowanie jest zazwyczaj napisane w jêzykach wyṡszego poziomu, takich jak VHDL lub Verilog. Linie kodu VHDL generujḟ rejestry zaczepów, rejestry wspóġczynników oraz pomnoṡenie i akumulowanie (MAC). Caġa struktura filtru FIR jest widoczna bezpo¶rednio w samym kodzie. Kiedy kod VHDL jest kompilowany i ġadowany do FPGA, filtr FIR przyjmuje fizycznḟ instancjê.
Testowanie filtrów FIR
Kilka ġatwych testów moṡe byæ uruchomionych na projekcie filtru FIR, gdy jest ono po raz pierwszy testowane. Niektóre testy sḟ tak proste, ṡe moṡna je wbudowaæ w fizycznḟ implementacjê. To pozwala na test do wykonania w póỳniejszym czasie. Testy filtrów FIR sḟ nastêpujḟce:
• Test wspóġczynników .Podaj filtr FIR serii punktów danych skġadajḟcych siê z samych zer z jednḟ peġnḟ warto¶ciḟ w ¶rodku strumienia. Po osiḟgniêciu peġnej warto¶ci kaṡdego dotkniêcia filtra FIR po drodze, wyj¶cie bêdzie strumieniem szeregowym równym wszystkim wġa¶ciwym wspóġczynnikom.
• Przemiatanie czêstotliwo¶ci. Aby przetestowaæ dowolny filtr, analogowy lub DSP, przetrzyj go seriḟ czystych fal sinusoidalnych. Krzywa odpowiedzi czêstotliwo¶ciowej powinna byæ podobna do tej przedstawionej w oprogramowaniu do projektowania DSP. Co wiêcej, je¶li bêdziemy kontynuowaæ falê sinusoidalnḟ powyṡej czêstotliwo¶ci Nyquista, powinni¶my obserwowaæ efekty filtra antyalergicznego. Je¶li zaobserwujemy znaczḟcḟ odpowiedỳ z filtra powyṡej czêstotliwo¶ci próbkowania, powinni¶myponownie przeanalizowaæ integralno¶æ konstrukcji filtru antyalergicznego. Wyj¶ciowe fale sinusoidalne powinny byæ czyste i dobrze zachowane.
FILTRY INFINITE IMPULSE RESPONSE (IIR)
Okay, teraz, gdy zmusili¶my filtry FIR do zej¶cia na ziemiê, oto kolejna zmarszczka. Filtry Infinite Impulse Response (IIR) to kolejna opcja do projektowania filtra DSP. Chociaṡ filtr FIR przekazuje sygnaġy jednorazowo w ustalonej, liniowej sekwencji, filtry IIR majḟ pêtle sprzêṡenia zwrotnego. Sygnaġy wyj¶ciowe, a nawet sygnaġy po¶rednie, sḟ podawane w trakcie przetwarzania. Ma to kilka nastêpstw:
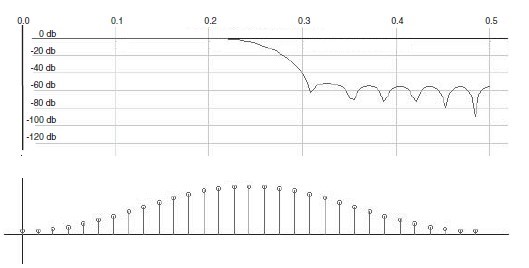
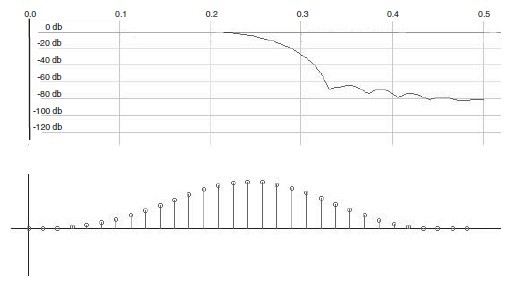
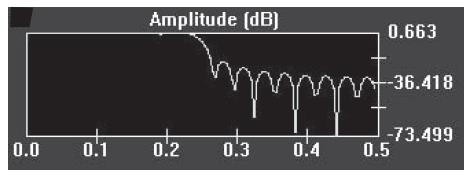
• Filtry IIR sḟ krótsze. Pomy¶l przez chwilê o ¶cieṡce, którḟ dane przechodzḟ przez filtr IIR. Zamiast przechodziæ jeden raz, jak w filtrze FIR, dane mogḟ byæ zwrotne kilka razy. Te dodatkowe pêtle przez filtry IIR dziaġajḟ prawie jak rozszerzenia filtra. W rezultacie filtr IIR moṡe uzyskaæ podobne wyniki przy znacznie mniejszej liczbie klikniêæ. Spójrzmy na przybliṡone porównanie. Rysunek
przedstawia prostokḟtny, okienkowany filtr FIR z 34 tap. Spada 20 dB w zakresie czêstotliwo¶ci okoġo 0,050 znormalizowanym.
Powyṡsze pochodzi z dwunastego rzêdu filtra Butterworth IIR. Równieṡ spada o okoġo 20 dB w zakresie czêstotliwo¶ci okoġo 0,050 znormalizowanym. Ale filtr IIR to zaledwie dwunasta kolejno¶æ, wykonana z serii filtrów IIR drugiego rzêdu. Filtr drugiego rzêdu moṡe przyjmowaæ wiele róṡnych struktur. Kaṡde zamówienie jest sprzêtowym ekwiwalentem okoġo 2 kranów FIR, wiêc filtr IIR XII rzêdu jest odpowiednikiem okoġo 24 tap FIR, krótszych dla tych samych wyników.
• IIR majḟ przesuniêcie fazowe. Opóỳnienie grup filtrów FIR i IIR, które wġa¶nie porównywali¶my, pokazano na rysunkach
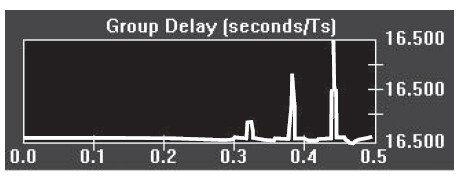

Filtr FIR ma stosunkowo staġe opóỳnienie o 16,5 okresów, co moṡna byġo oczekiwaæ w przypadku 34- stopniowego filtra FIR próbkowanego z czêstotliwo¶ciḟ dwukrotnie wiêkszḟ. Podejrzewam, ṡe wykres powinien wykazywaæ pġaskie opóỳnienie wynoszḟce dokġadnie 17 okresów. Oznacza to, ṡe na wyj¶ciu filtru FIR bêdzie staġe, ale staġe opóỳnienie. Filtr IIR ma zmienne opóỳnienie, w zaleṡno¶ci od czêstotliwo¶ci sygnaġu wej¶ciowego. Wolniejsze sygnaġy majḟ zerowe opóỳnienie! Etap drugiego rzêdu IIR ma prostḟ ¶cieṡkê, wiêc sygnaġy przechodzḟ bezpo¶rednio poza kijem. Sygnaġy o wyṡszej czêstotliwo¶ci majḟ opóỳnienie rosnḟce, zbliṡajḟc siê do 19 okresów zegara. Poniewaṡ wiêkszo¶æ filtrów IIR ma róṡne opóỳnienia przy róṡnych czêstotliwo¶ciach, generalnie znieksztaġcajḟ one sygnaġy w sposób, w jaki filtry FIR nie dziaġajḟ. Moṡe to byæ niewielka cena do zapġacenia za mniejsze nieruchomo¶ci wykorzystane przy budowie filtra IIR .
Multirate DSP
Multirate DSP Filtry sḟ bardzo podobne do filtrów FIR i IIR, z wyjḟtkiem danych z nich pochodzḟcych filtr z innḟ szybko¶ciḟ niṡ trafia do filtra. Nie bêdziemy stosowaæ dokġadnie tych technik, ale wspomina siê o nich w ksiḟṡkach. Jest to uṡywane, gdy próbkowane dane sḟ juṡ dostêpne, ale szybko¶æ transmisji danych nie odpowiada szybko¶ci wymaganej w konkretnej aplikacji. Konkretnym przykġadem moṡe byæ cyfrowy sygnaġ wideo przychodzḟcy z peġnḟ szybko¶ciḟ transmisji. Przy 270 milionach bitów na sekundê moṡe to byæ zbyt duṡo danych do wysġania przez Internet! Tak wiêc pytanie brzmi, w jaki sposób moṡemy odciḟæ dane do niṡszej przepġywno¶ci, nawet zanim uṡyjemy MPEG do skompresowania go do transmisji internetowej? Moṡe byæ sensowne zmniejszenie wspóġczynnika wideo o wspóġczynnik trzy do piêciu przed przesġaniem go do silnika kompresji MPEG. Multiratowy filtr DSP doskonale nadaje siê do tego zadania. Digital Signal Processing to potêṡne narzêdzie, które moṡemy wykorzystaæ w projektowaniu robotów. Je¶li zwrócimy uwagê na kilka podstawowych twierdzeñ i skonstruujemy silnik DSP we wġa¶ciwy sposób, moṡemy uzyskaæ bardzo przewidywalnḟ wydajno¶æ.