Sprzêt Komputerowy
Zanim przejdziemy do nakrêtek i ¶rub sprzêtu komputerowego w robocie, cofnijmy siê o krok. Jakie sḟ powody umieszczenia komputera w robocie? Nawet do¶wiadczeni inṡynierowie gġowiḟ siê nad tḟ kwestiḟ. W koñcu wydaje siê byæ naturalnḟ decyzjḟ. Jednak gdy patrzymy na jeden konkretny powód, zawsze kryje za nim jedne konkretny powód, zawsze kryje siê podstawowa przyczyna. Na poczḟtku kaṡdej fazy projektu robotycznego warto przeanalizowaæ opcje . Czêsto dostêpne jest lepsze rozwiḟzanie. Spójrzmy na przykġad nietechniczny. Ty i Twój przyjaciel stoicie na otwartym polu w obliczu groỳnego lwa. Lew zaczyna szarṡowaæ i jasne jest ,ṡe musicie uciekaæ. Jaki powinien byæ Twój bezpo¶redni cel? Niektórzy powiedzḟ "Uciekaj przed lwem". Inni mówiḟ "Unikaj przyjaciela". Oczywi¶cie trudno jest my¶leæ w stresujḟcych sytuacjach. Je¶li mamy czas ,aby my¶leæ , moṡemy zaoszczêdziæ czas, wysiġek i ból. Nie daj siê jednak uwiêziæ w niekoñczḟcych siê rundach my¶lenia i planowania .To dobry sposób aby zostaæ zjedzonym przez lwa. Taki scenariusz przetrwania jest dobrym przykġadem tego, jak duṡo pytañ pozostaje powyṡej bezpo¶redniego pytania. Czy druga odpowiedỳ sprawiġa ,ṡe siê u¶miechnḟġe¶? Je¶li tak, dlaczego? Dlaczego wiêc w ogóle korzystaæ z komputera? Najwaṡniejsze to :
• Projekt bêdzie kosztowaġ mniej do zakoñczenia
• Robot bêdzie lepszy
• Projekt moṡe zostaæ ukoñczony wcze¶niej
Przyjrzyjmy siê skḟd pochodzḟ te oszczêdno¶ci. Kaṡdy projekt to koszt wzglêdem czasu i pieniêdzy:
• Jakiego typu koszty istniejḟ?
• Bezpo¶rednie nakġady pieniêṡne na sprzêt , czê¶ci i narzêdzia
• Powiḟzanie rzadkich zasobów. Czasami projekty zuṡywajḟ zasoby, których nie moṡna zastḟpiæ, ale sḟ zasadniczo bezpġatne. Przykġadem moṡe byæ czas kluczowego pracownika. Je¶li nadejdzie inny projekt , kluczowy pracownik nie bêdzie dostêpny.
• Czas projektowania. Czas potrzebny na opracowanie wymaga róṡnych kosztów doġḟczonych do niego. Je¶li harmonogram projektu robota komercyjnego ma po¶lizg, firmie moṡe brakowaæ duṡej czê¶ci potencjalnych zysków. Gdy tylko konkurenci wyjdḟ z podobnymi produktami, zyski szybko spadnḟ. Pierwsze kilka miesiêcy ṡycia produktu sḟ najcenniejsze. Je¶li robot nie jest gotowy na czas, traci siê koszt alternatywny. Je¶li harmonogram projektu ma po¶lizg, generalnie pojawiḟ siê rzeczywiste koszty. Zasoby i personel mogḟ byæ równieṡ powiḟzane , co powoduje dġuṡszy czas rozwoju,
• Ryzyko awarii. Menadṡerowie projektów robotów czêsto wydatkujḟ zasoby na wczesnym etapie harmonogramu, aby rozġadowaæ ryzyko. Jako przykġad rozwaṡ robota, który musi przemierzyæ trudny teren. Projektanci mogḟ zbudowaæ kilka róṡnych ukġadów napêdowych i przetestowaæ je przed przystḟpieniem do reszty projektu. Je¶li projekt wiḟṡe siê z niewielkim ryzykiem, ostateczny koszt prawdopodobnie bêdzie niṡszy. Je¶li ryzyko projektu staje siê prawdziwym problemem, harmonogramy czêsto siê pogarszajḟ. a koszty rosnḟ. Decyzja o uṡyciu sprzêtu komputerowego w projekcie robota moṡe w róṡny sposób zmniejszyæ koszt projektu .
Wykorzystaj Istniejḟcḟ Technologiê
Cywilizacja rozwija siê dziêki swojej historii i wiedzy. Ludzie sḟ wyjḟtkowi, poniewaṡ przechowujḟ informacje poza swoimi mózgami, w bibliotekach i komputerach. Zgromadzone praca innych moṡe zostaæ odkryta aby rozwiḟzaæ nasz problem. W przypadku komputerów inṡynierowie udostêpnili swoje prace w postaci zarchiwizowanego oprogramowania i sprzêtu obwodów drukowanych. Kaṡdy moṡe
byæ szybko i niedrogo odtworzony do naszego uṡytku. Sprzêt komputerowy jest dostêpny w róṡnych formach. Moṡemy kupiæ gotowy komputer w sklepie, ale bêdzie zbyt duṡy aby zmie¶ciæ siê w robicie. Moṡemy zakupiæ katy obwodów drukowanych od dystrybutorów i umie¶ciæ je w robocie. Moṡemy równieṡ zakupiæ chipy komputerowe od dystrybutorów i zbudowaæ wġasne katy obwodów drukowanych, co jest trudnym rozwiḟzaniem dla zwykġego projektanta robotów. Moṡemy zakupiæ kompletne systemy komputerowe na karcie. która zaakceptuje nasze oprogramowanie i zapewni zġḟcza dla liii sygnaġowych potrzebnych do sterowania robotem. Jest to czêsto najbardziej ekonomiczna metoda integracji komputerów z projektem, o ile nie zostanḟ wyprodukowane duṡe ilo¶ci robotów. Firmy sprzedajḟce komputery zainwestowaġy miliny dolarów aby udostêpniæ swojḟ technologiê do naszego uṡytku. Zdobywamy czas, pieniḟdz i niezawodno¶æ, dzielḟc siê i wykorzystujḟc ich wysiġek
.P oniewaṡ technologia zostaġa tak ġatwo udostêpniona innym, wiele projektów osób/firm trzecich jest równieṡ dostêpnych do uṡycia, jak nastêpuje:
• Sprzêt innych firm. Wiêkszo¶æ komputerów ma zġḟcza, które umoṡliwiajḟ na, korzystanie z
"magistrali" . Póỳniej zdefiniujemy ten termin, ale wystarczy powiedzieæ ,ṡe magistrala pozwala firmom zewnêtrznym projektowaæ sprzêt , który bêdzie doġḟczony do naszego komputera. Dostêpnych jest dziesiḟtku pġytek drukowanych (PCB) i innych wygodnie upakowanych obwodów.
• Oprogramowanie innych firm. Jest maġo prawdopodobne , ṡe inne firmy majḟ napisane oprogramowanie, z którego mogliby¶my skorzystaæ. Je¶li komputer ,który wybieramy jest
"specjalnego przeznaczenia" , kilka firm prawdopodobnie napisaġo oprogramowanie, które wykorzystuje specjalne funkcje komputera. Moṡemy kupiæ oprogramowanie i uṡywaæ go na róṡne sposoby.
- Freeware : Czêsto autor oprogramowania sprawia ,ṡe bêdzie ono dostêpne za darmo dla innych uṡytkowników.
- Shareware : Jest bardzo podobne do freeware, z wyjḟtkiem tego ,ṡe autor ṡḟda czêsto zapġaty, je¶li shareware jest uṡywane w robocie. Moṡna wyszukiwaæ shareware i uwaṡnie przeczytaæ ograniczenia. Zrobiæ kopie wymagañ autora i zapisaæ je, je¶li póỳniej pojawiġyby siê póỳniej pytania.
- Licencjonowanie : Duṡe systemy operacyjne, narzêdzia i oprogramowanie aplikacyjne zwykle majḟ wymagania licencyjne. Skontaktuj siê z firmḟ ,która sprzedajḟ oprogramowanie, bezpo¶rednio po informacjê
Przyspieszenie Inṡynierii
Uṡywanie komputerów w robocie eliminuje potrzebê peġnego i szczegóġowego planowania. Prawda jest taka, ṡe niektóre projekty sḟ zbyt trudne do szczegóġowego zaplanowania. Ale je¶li moṡemy byæ pewni na poczḟtku, ṡe nasz komputer zapewni nam elastyczno¶æ i moc, jakiej potrzebujemy w nieprzewidzianych okoliczno¶ciach, moṡna kontynuowaæ bez peġnego planowania. Umieszczenie komputera w systemie przynosi nastêpujḟce korzy¶ci do harmonogramu inṡynieryjnego:
• Caġkowity nakġad pracy inṡynierskiej moṡna podzieliæ. Je¶li mamy wiêcej niṡ jednḟ osobê pracujḟcḟ nad robotem , praca moṡe byæ podzielona i wykonywana równolegle. Jedna osoba moṡe skoncentrowaæ siê na sprzêcie, podczas gdy inna zaczyna od oprogramowania. Sprzêt nie musi zostaæ ukoñczony przed uruchomieniem oprogramowania. Programista moṡe pracowaæ na pġytce podobnej do tej z robocie
• Zmiany w specyfikacji robota mogḟ byæ dokonywane po drodze z pewno¶ciḟ ,ṡe nowe wymagania moṡna uwzglêdniæ tylko w oprogramowaniu. O wiele ġatwiej jest zmieniæ oprogramowanie niṡ zmieniæ projekt sprzêtu
• Projekt moṡe zostaæ zmieniony w razie potrzeby w celu póỳniejszej konserwacji, nawet po zakoñczeniu pracy robota
Architektura Komputerowa
Komputery zostaġy zaprojektowane do szybkiego wykonywania obliczeñ arytmetycznych w sposób powtarzalny. Istnieje wiele róṡnych sposobów , w jakie moṡna zbudowaæ komputer a ta sekcja obejmuje wiele róṡnych istniejḟcych architektur
Typy Komputerów
Zaġóṡmy ṡe w tej chwili zdecydowali¶my siê umie¶ciæ komputer w robocie. Chociaṡ dostêpnych jest wiele komputerów ogólnego przeznaczenia warto najpierw przyjrzeæ siê komputerom specjalnego przeznaczenia. Prawdopodobnie wybierzemy komputer ogólnego przeznaczenia do robota, ale komputer specjalnego przeznaczenia mogḟ przynie¶æ wiele korzy¶ci projektowi. Poniṡej omówimy podstawowe architektury niektórych komputerów specjalnego przeznaczenia.
Komputery Analogowe
Sġownik definiuje analogowy jako "co¶ podobnego do czego¶ innego; mechanizm w którym dane sḟ reprezentowane przez nieustannie zmienne wielko¶ci fizyczne". Komputery analogowe sḟ powszechnie postrzegane jako powrót do poczḟtków maszyn obliczeniowych. Nawet teraz wszystkie komputery elektroniczne wykorzystujḟ analogowe sygnaġy elektroniczne do obsġugi swoich obliczeñ. Komputery cyfrowe ogólnego przeznaczenia ograniczajḟ jednak sygnaġy analogowe elektroniczne do zaledwie dwóch poziomów napiêcia reprezentujḟcych binarnḟ 1 i binarne 0, aby zwiêkszyæ prêdko¶æ. Komputery analogowe nie majḟ takich ograniczeñ napiêcia dla sygnaġów. Zamiast tego sygnaġy róṡniḟ siê w zakresie napiêæ, które moṡe obsġuṡyæ analogowa elektronika komputerowa. Pojedynczy sygnaġ analogowy moṡe bezpo¶rednio reprezentowaæ , na przykġad, prêdko¶æ wiatru o 0 do 255 km/h. Komputer ogólnego przeznaczenia potrzebuje o¶miu sygnaġów (28 = 256) aby reprezentowaæ ten sam zakres warto¶ci dla wiatru. Komputery analogowe wykorzystujḟ analogowe ukġady elektroniczne, takie jak wzmacniacze operacyjne do budowy obwodów w celu symulacji zachowania zġoṡonych systemów. Sḟ szczególnie dobre w systemach symulacyjnych które sḟ zarzḟdzane przez równania róṡniczkowe. System sterowania drugiego rzêdu opisany w innym miejscu jest dokġadnym przykġadem. Za pomocḟ tylko jednego wzmacniacza operacyjnego , komputer analogowy moṡe w peġni symulowaæ te same krzywe i kontrole parametryczne które juṡ obejrzeli¶my Przód komputera analogowego wyglḟda jak gigantyczna tablica rozdzielcza z wieloma miejscami do podġḟczenia przewodów. Aby zaprogramowaæ komputer analogowy inṡynier uṡywa kabli poġḟczeniowych do poġḟczenia wymaganych bloków konstrukcyjnych. Pokrêtġa na komputerze analogowym moṡna obracaæ aby wprowadziæ warto¶ci ṡḟdanej czêstotliwo¶ci i tġumienia. Inṡynier uruchamia komputer, a igġa miernika pokazuje wynikowḟ krzywḟ na przestrzeni kilu sekund symulowanego czasu. Na przykġadzie systemu drugiego rzêdu naszego robota, przeregulowanie jest oczywiste je¶li igġa miernika chodzi zbyt szybko zanim siê uspokoi. Dzwonienie moṡe byæ postrzegane jako oscylacja igġy w przód i w tyġ gdy siê uspokaja. Komputery analogowe wypadġy z gry z dwóch powodów:
• Komputery ogólnego przeznaczanie moṡna zaprogramowaæ do symulacji komputera analogowego , eliminujḟc potrzebê stosowania sprzêtu analogowego
• Komputery ogólnego przeznaczenia moṡna zaprogramowaæ na róṡne sposoby aby rozwiḟzaæ te same problemy. Zamiast symulowaæ komputer analogowy (który symuluje rzeczywiste problem), komputer ogólnego przeznaczenia moṡna zaprogramowaæ do symulacji bezpo¶redni w rzeczywistym ¶wiecie.
Sieci Neuronowe
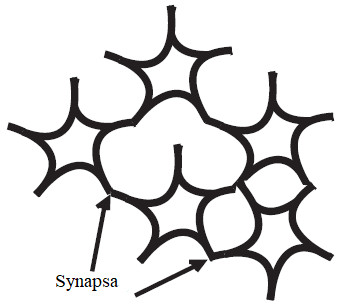
Jednym z najlepszych znanych silkników obliczeniowych jest ludzki mózg. Moṡe rozwiḟzywaæ najbardziej zġoṡone rzeczywiste problemy znacznie szybciej niṡ komputer ogólnego przeznaczenia aczkolwiek z mniejszḟ precyzjḟ. Komputery elektroniczne najlepiej nadajḟ siê do problemów wymagajḟcych zdolno¶ci arytmetycznych i o¶lepiajḟcej prêdko¶ci wykonywania takich jak prognozowanie pogody. Ale nie sḟ one dobre w rozwiḟzywaniu problemów wymagajḟcych osḟdu lub do¶wiadczenia. Ludzi mózg ma do¶wiadczenie i "okablowanie" aby zajḟæ siê problemami , których nigdy wcze¶niej nie widziaġ i rozwiḟzywaæ je z szybko¶ciḟ i niezawodno¶ciḟ. Rodzice nastolatków mogḟ spieraæ siê z tym ostatnim stwierdzeniem ale nigdy nie próbowali ṡyæ z nastoletnim robotem, który zmaga siê z programowaniem komputera ,aby mógġ przetrwaæ miġo¶æ szczeniaka. Bḟdỳcie pewni ,ṡe rodzcie woleliby poradziæ z ludzka nastolatkḟ, która ,wierzcie lub nie, ma niesamowite zdolno¶ci w porównaniu do skomputeryzowanego robota. Czy wiêc jest sieæ neuronowa? Odkḟd ludzie po raz pierwszy zrozumieli strukturê cel ludzkiego mózgu marzyli o stworzeniu sztucznego mózgu. Zaproponowano wiele projektów takiego mózgu , w tym sieci neuronowe. Najpierw spójrzmy na ludzki mózg. Komórki mózgu zwane neuronami sḟ poġḟczone razem w szeroki wachlarz tkanki w mózgu. Komunikujḟ siê elektronicznie ze sobḟ przez poġḟczenia neuronowe, zwane synapsami. To pozwala neuronom na wymianê informacji z bliskimi sḟsiadami. Neurony zachowujḟ informacje (zwane pamiêciḟ) chemicznie i elektrycznie w ciele komórki
Na przykġad pamiêæ konkretnego dnia wiosennego moṡe byæ rozġoṡona na szeroki wachlarz neuronów, które kierujḟ zapachem, wzrokiem sġyszeniem, ruchem i tak dalej. Wspomnienie dnia wiosennego jest rozproszone w caġym mózgu. Wspomnienia mogḟ byæ niedoskonaġe i mogḟ zanikaæ, gdy poszczególne neurony zaczynajḟ traciæ swojḟ indywidualnḟ pamiêæ dnia. Wspomnienia sḟ przechowywane niemal
jak zdjêcia rozġoṡone na tkaninie mózgu. Neurony mogḟ przechowywaæ wiêcej niṡ jednḟ pamiêæ w tym samym czasie. Dlatego pamiêæ jednej rzeczy, naj wiosenny dzieñ, moṡe przywoġywaæ wspomnienie innego do¶wiadczenia , takiego jak lodowata woda strumienia. Czġowiek który przypomniaġ sobie wiosenny dzieñ z szumem strumyka, najprawdopodobniej pogġêbiġ pamiêæ wchodzenia w haġa¶liwy , lodowaty potok. Fakt, ṡe haġas byġ w obu wspomnieniach , ġḟczy wspomnienia. Czġowiek nauczyġ siê podejrzewaæ potoki w wiosenne dni; mogḟ byæ lodowate. Uczenie siê jest czym¶ w czym komputery ogólnego przeznaczenia nie sḟ dobre . Niektóre sieci neuronowe sḟ zaprojektowane tak ,aby na¶ladowaġy zdolno¶æ uczenia siê ludzkiego mózgu. Sḟ naraṡone na szereg sytuacji i stopniowo uczḟ siê radziæ sobie z nimi Komputery sieci neuronowych sḟ zwykle projektowane z pojedynczymi
"neuronami", które mogḟ komunikowaæ siê ze sobḟ , szczególnie w ich bezpo¶rednim sḟsiedztwie . Sḟ uġoṡone w rzêdy i brzegi neuronów
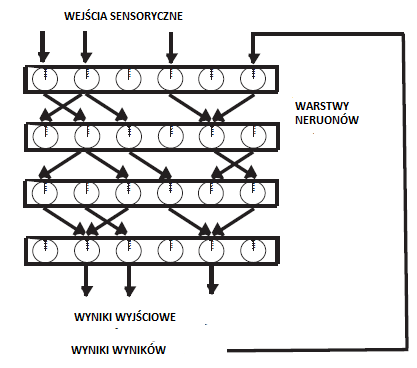
Wyniki kaṡdej warstwy sḟ podawane do serii jednostek komunikacyjnych które wykonujḟ obliczenia i przekierowujḟ informacje do innych neuronów. Seria wydarzeñ w ¶wiecie rzeczywistym jest podawana jako dane wej¶ciowe u góry, sieæ neuronowa przetwarza dane wej¶ciowe i generuje odpowiedzi z doġu. Wyniki sḟ punktowane (przez do¶wiadczonḟ osobê) a wyniki jest przekazywany z powrotem do sieci neuronowej u góry. Nastêpnie sieæ dostosowuje swoje jednostki komunikacyjne aby nastêpnym razem lepiej siê spisywaæ. Z pewno¶ciḟ sieæ bêdzie dziaġaæ lepiej gdy nastêpnym razem zobaczy te same zdarzenia , które zostanḟ wprowadzone do jej ỳródeġ. Ale co dziwne, czêsto robi to lepiej na nowych wydarzeniach , których nigdy wcze¶niej nie widziaġ. Jako taki, uczy siê. Sieci neuronowe moṡna budowaæ na wiele sposobów. Jeden badacz wziḟġ krzemowy substrat (pġytkê uṡywanḟ do budowy chipów komputerowych), wydrḟṡone dziury w podġoṡu umie¶ciġ neurony w jamach i pozwoliġ neuronom komunikowaæ siê poprzez ġḟczenie synaps. Ukġad komputerowy zostaġ wytrawiony w innych obszarach podġoṡa. Caġy obwód dziaġa na poġḟczeniu glukozy i elektryczno¶ci. Sieci neuronowe mogḟ byæ zbudowane ze sprzêtu komputerowego (przy uṡyciu chipów komputerowych) lub mogḟ byæ symulowane w oprogramowaniu. Odnotowano wiele udanych zastosowañ oprogramowania. Odnotowano wiele udanych zastosowañ oprogramowania sieci neuronowej w systemach które muszḟ rozwijaæ "ocenê sytuacji" . Jednḟ z aplikacji byġo przewidywanie oszustw zwiḟzanych z kartami kredytowymi . Poprzez udostêpnienie oprogramowania sieci neuronowej wielu aplikacjom obsġugujḟcym karty kredytowe, a nastêpnie informowanie sieci, którzy klienci nie ui¶cili naleṡno¶ci, sieæ zostaġa przeszkolona do skanowania nowych aplikacji i odrzucania tych klientów, którzy mogḟ ui¶ciæ póỳniej.
Procesory Specjalnego Przeznaczenia
Podstawowḟ zaletḟ komputera jest jego o¶lepiajḟca szybko¶æ. Moṡe wykonywaæ wiele milionów instrukcji na sekundê/ Ale niektóre zadania wymagajḟ przetworzenia naprawdê ogromnej ilo¶ci informacji. Aplikacje te wymagajḟ dodania jeszcze szybszego sprzêtu do przetwarzania informacji. Taki szybki sprzêt jest specjalnie zaprojektowany do przetwarzania informacji pod rêkḟ, ale nie moṡe wykonywaæ ṡadnej innej funkcji, Szybki sprzêt jest zintegrowany bezpo¶rednio z chipem z resztḟ sprzêtu komputerowego. Moṡemy znaleỳæ procesory specjalnego przeznaczenia w¶ród nastêpujḟcych grup dostawców:
• Dostawcy ukġadów scalonych specyficznych dla aplikacji (ASIC) . Je¶li nie moṡemy znaleỳæ komputer specjalnego przeznaczenia, którego pragniemy , moṡemy go wykonaæ! Potrzeba nam ogromnych sum pieniêdzy na rozwój , wiêc nasza aplikacja robota musiaġaby mieæ naprawdê wysokḟ wielko¶æ sprzedaṡy, aby to rozwaṡyæ. Rdzenie komputerów Advanced Risc Machine (ARM) moṡna ġḟczyæ z obwodami specjalnego przeznaczenia i nakġadaæ na pojedynczy ASIC
• Firmy póġprzewodnikowe na bazie prefabrykatów. Wiele bardzo maġych firm komputerowych buduje komputery specjalnego przeznaczenia. Zwykle sḟ wysyġane do dostawców ASIC aby tworzyæ ich projekty na chipy, ale wykonali oni pracê i rozġoṡyli koszty na wielu klientów. Znajdỳ je w czasopismach po¶wiêconych projektom elektronicznym i na konwencjach . Rozwaṡ wyszukiwanie ich w internecie przy uṡyciu funkcji specjalnego przeznaczenia jako jednego ze sġów kluczowych
Wiele funkcji specjalnego przeznaczenia zostaġo zintegrowanych w obwodach komputerowych i wprowadzonych na rynek. Nastêpujḟce funkcje specjalne sḟ dostêpne od kilku dostawców:
• £ḟczno¶æ bezprzewodowa. Istniejḟ ukġady scalone które mogḟ konwertowaæ i przekazywaæ sygnaġy danych falami radiowymi (RF) bezpo¶rednio do obwodu komputera. Chipy te sḟ uṡywane w pagerach telefonach radiotelefonach , GPS znacznikach RM kartach inteligentnych itd. Je¶li aplikacja robota wymaga komputerów specjalnego przeznaczenie o podobnych, rozwaṡ przyjrzenie siê dostawcom na rynkach. Naleṡy jednak pamiêtaæ ,ṡe kilka z tych ukġadów jest dostêpnych w maġych ilo¶ciach. Sḟ równieṡ trudne do zastosowania
• Komunikacja internetowa . Wiele chipów komputerowych jest dostêpnych w zintegrowanych interfejsach sieci lokalnej (LAN) uṡywanych do ġḟczenia siê z Internetem Co wiêcej niektóre z tych komputerów majḟ zintegrowane stosy oprogramowania, które mogḟ przetwarzaæ przepġyw danych internetowych w czasie rzeczywistym wewnḟtrz ukġadu. Tego rodzaju przetwarzania moṡe znacznie przyspieszyæ dziaġanie robota, je¶li jego konstrukcja wymaga duṡej ilo¶ci informacji przepġywajḟcych prze protokóġ internetowy (IP)
• Digital Signal Processing (DSP). Obwód DSP jest uṡywany do przetwarzania informacji w sposób w jaki wiêkszo¶æ procesów ogólnego przeznaczenia nie moṡe tego robiæ.
• Procesor OMAP DSP Texas Instruments
• Analog Devices
• Kontrolery analogowe. Wiele procesorów specjalnego przeznaczenia ma ukġad analogowy bezpo¶rednio na chipie cyfrowym. Jednym z modnych sġów dla tego rodzaju ukġadów jest mieszany sygnaġ. Taka technologia a kilka zalet, ale wiodḟcym jest koszt. Je¶li mikroukġad moṡe speġniæ wszystkie wymagania naszego robota bez dalszych analogicznych prac projektowych, moṡemy wyj¶æ z wyprzedzeniem.
• Systemy wy¶wietlania. Wiele robotów wymaga centrali lub wy¶wietlaczy informacyjnych. Nie jest trudno zintegrowaæ wy¶wietlacza ciekġokrystaliczne (LCD), nawet duṡy ,z komputerem. Wiele ukġadów komputerowych moṡe obsġugiwaæ ekrany LCD bezpo¶rednio.
• Jednostki o niskim poborze mocy. Komputer kieszonkowy PDA wraz z telefonami i pagerami tworzy caġḟ seriê ukġadów komputerowych , które mogḟ dziaġaæ na bardzo niskim poziomie napiêcia i mocy. Je¶li moc naszego systemu komputerowego robota stanowi znacznḟ czê¶æ budṡetu zasilania, rozwaṡmy systemy komputerowe o niskiej mocy. Moṡna równieṡ stosowaæ wiele innych technik oszczêdzania energii w systemach komputerowych
• Jednostki gier. Jest to maġo znany fakt ,ale wiele komputerów skoñczyġo w grach. Zgadza siê. Ogromna liczna komputerów w zabawkach przerasta inne praktyczne zastosowania. Sḟ to na ogóġ bardzo maġe komputery, które kosztujḟ prawie nic.
Procesory Równolegġe
Równolegġe przetwarzanie nie jest nowe. Metoda ta wynika z faktu ,ṡe wiele problemów obliczeniowych nie musi byæ wykonywanych krok po kroku. Czêsto problem obliczeniowy moṡna podzieliæ na problemy, które mogḟ byæ wykonywane jednocze¶nie, bez obawy, ṡe praca nad jednym pozwoli uniknḟæ pracy nad drugim problemem. Podczas II wojny ¶wiatowej projekt bomby atomowej zatrudniaġ kilkadziesiḟt osób, które pracowaġy przy kalkulatorach mechanicznych równolegle wykonujḟc obliczenia. Wiêkszo¶æ wspóġczesnych procesorów ogólnego przeznaczenia (takich jak Intel lub Motorola) zawiera juṡ wiêcej niṡ jednego komputera w ukġadzie. Dzieje siê tak, poniewaṡ prawie kaṡdy problem obliczeniowy moṡe przynie¶æ przynajmniej w pewnym stopniu korzy¶ci z przetwarzania równolegġego. Zastanówmy siê przez chwilê nad wykonaniem nastêpujḟcej pseudo-instrukcji : Je¶li A
, wtedy B , w innym przypadku C. Szeregowy sposób przetwarzania tej instrukcji polega na obliczeniu A , a nastêpnie obliczaniu B lub C. Z trzema procesorami, którymi dysponujemy, moṡemy obliczyæ A, B i C w tym samym czasie. Kiedy ta jedna faza obliczeñ jest zakoñczona, komputer wybiera jedynie (w oparciu o A) albo B albo C jako odpowiedỳ. Moṡe to uratowaæ jeden cykl komputerowy. Prawdḟ jest to ,ṡe jedna trzecia pracy jest marnowana, ale program dziaġa dwa razy szybciej. Techniki z poprzedniego przykġadu nie moṡna ekstrapolowaæ na znacznie bardziej zġoṡony problem obliczeniowy. Wraz ze wzrostem liczby instrukcji w zġoṡonych programach liczba "gaġêzi" gwaġtownie ro¶nie. W poprzedniej instrukcji If tylko jedna gaġḟỳ byġa uṡyta, wiêc potrzebowali¶my tylko 21 procesorów ( w rzeczywisto¶ci 3). W bardziej zġoṡonych programach z wieloma rozgaġêzieniami, liczba procesorów ro¶nie bardzo szybko co sprawia ,ṡe przetwarzanie równolegġe jest niepraktyczne. Sposobem na unikniêcie tego problemu jest ograniczenie liczby aplikacji, które próbujemy rozwiḟzaæ za pomocḟ przetwarzania równolegġego. Wiele klasycznych problemów obliczeniowych moṡna w naturalny sposób podzieliæ na zadania równolegġe. Rozwaṡmy przetwarzania pogody lub systemy wizyjne (dla robota) . Pole widzenia moṡe byæ podzielone na obszary a pojedynczy procesor ,moṡe byæ przypisany do kaṡdego obszaru w tablicy. Kaṡdy przetwarza informacje przychodzḟce na jego obszar. Ogólnie procesory mogḟ komunikowaæ siê z sḟsiadujḟcymi procesorami .W aplikacji pogodowej kaṡdy procesor aktualizuje pogodê na swoim maġym obszarze (który moṡe mieæ tylko kilkaset metrów kwadratowych). Komunikuje siê z sḟsiednimi komputerami, aby poinformowaæ je o istotnych zdarzeniach takich jak wilgotne powietrze poruszajḟce siê w ich okolicy. W ten sposób prognozy pogody staġy siê znacznie dokġadniejsze i bardziej aktualne. Procesor macierzowy ma ogólnḟ strukturê
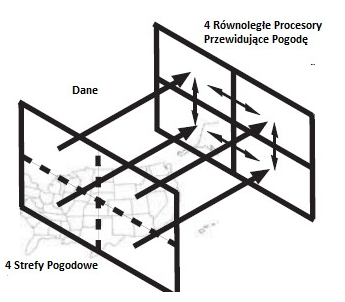
Takḟ macierz moṡna zbudowaæ przy uṡyciu procesorów ogólnego przeznaczenia, ale firmy stworzyġy procesory specjalnie zaprojektowane do przetwarzania równolegġego. Zawierajḟ struktury komunikacyjne u specjalne instrukcje , dziêki którym przetwarzanie równolegġe jest bardziej wydajne. Czêsto firmy te obsġuguje oprogramowanie systemu operacyjnego i kompilatory dziêki którym partycjonowanie i hostosowanie aplikacji jest znacznie prostsze
Digital Signal Processing (DSP)
Chipy DSP sḟ w zasadzie procesorami specjalnego przeznacznie zaprojektowanymi do obsġugi okre¶lonej klasy problemów obliczeniowych. Gġównḟ cechḟ wspólnḟdla wiêkszo¶ci ukġadów DSP jest MAC, co oznacza Multiply and Acumulate. Procesory DSP sḟ specjalnie zaprojektowane ,aby szybko pomnoṡyæ dwie liczby razem i dodaæ je do trzeciej (akumulowaæ). Kilka typów problemów arytmetycznych jest dobrze obsġugiwanych przez taki procesor:
• Szereg Taylora. W 1712 oku matematyk, Brook Taylor napisaġ wzór, który moṡna wykorzystaæ do przybliṡania funkcji. Gdzie f(x) jest funkcjḟ (z pewnymi ograniczeniami ciḟgġo¶ci) a fn(x) jest n-tḟ pochodnḟ f(x) wzglêdem x , ti f(x) moṡe byæ przybliṡona w pobliṡu x = a wedġug wzoru

plus reszta. Ten wzór zapewnia standardowy sposób przybliṡania i obliczania funkcji takich jak sinus czy kosinus .W ten sposób kompilatory konfigurujḟ obliczenia. Obejmuje to kilka kroków mnoṡenia i akumulacji. Kaṡdy wyraz w tym równaniu to inny MAC. Ogólnie rzecz biorḟc, pozostaġa czê¶æ moṡe byæ dowolnie maġa przez wykonanie wiêkszej liczby warunków (co oznacza ,ṡe jest wiêksza)
• Filtry Finite Impulse Response (FIR). Sḟ one zwykle uṡywane do filtrowania ciḟgġego strumienia informacji reprezentujḟcych audio lub wideo. Rozwaṡ odbieranie sygnaġu audio w obecno¶ci silnego zakġócajḟcego ỳródġa szumu 1 kHz. Chcieliby¶my usunḟæ szum 1 kHz z naszego sygnaġu (najlepiej jak potrafimy). Je¶li sygnaġ audio jest cyfrowy, moṡna go wprowadziæ do filtru FIR
specjalnie zaprojektowanego do odfiltrowywania sygnaġów 1 kHz. Metoda filtru FIR pozwala nam to zrobiæ w tak precyzyjny sposób, jaki jest wymagany, regulowany wyġḟcznie kosztami. Zaġóṡmy ,ṡe chcemy przefiltrowaæ sygnaġ x(t) aby wytworzyæ sygnaġ y(t). Uogólniona formuġa dla n-etapowego filtra FIR jest dana przez

gdzie h1… hn sḟ wspóġczynnikami filtra. Widzimy ,ṡe ten wzór jest równieṡ seriḟ MAC′ów
• Transformaty Fouriera. Zostaġy opracowane ,jak moṡna siê domy¶laæ przez Josepha Fouriera na poczḟtku XIX wieku. Transformacje sḟ sposobem reprezentowania dowolnej funkcji w pewnych granicach jako szereg superpozycji czystych fal sinusoidalnych (pomnoṡone przez wspóġczynnik). Transformata Fouriera ma wiele wariantów, w tym szybkḟ transformatê Fouriera (FFT) i dyskretnḟ transformacjê kosinusowḟ (DCT). Transformacje te sḟ powszechnie uṡywane do usuwania szumu i niechcianych czêstotliwo¶ci z obrazu lub sygnaġu w nastêpujḟcy sposób. Obraz jest przeksztaġcany w seriê dyskretnych czêstotliwo¶ci .Nastêpnie niechciane czêstotliwo¶ci sḟ kasowane (lub wybierane sḟ poṡḟdane czêstotliwo¶ci). Tak czy inaczej , ziarna sḟ oddzielane od plew. Nastêpnie obliczana jest odwrotna transformata Fouriera aby zrekonstruowaæ obraz, który jest bardziej przejrzysty i ġatwiejszy do zrozumienia niṡ oryginaġ. Wystarczy powiedzieæ, ṡe FFT i inne podobne transformacje uṡywajḟ szeregu operacji MAC. W robotach, FFT mogḟ byæ uṡywane do identyfikacji obiektów w polu widzenia. Je¶li FFT sḟ wykonywane w cyfrowym polu widzenia, komputer DSP robota moṡe szukaæ sygnatur FFT okre¶lonych obiektów odrzucajḟc wszystkie obiekty które nie sḟ zgodne.
Notki O DSP
Procesory DSP majḟ sprzêt specjalnego przeznaczenia, który przyspiesza obliczenia, które muszḟ wykonaæ. Te struktury sprzêtowe zwiêkszajḟ zarówno dokġadno¶æ , jak i szybszḟ realizacjê.
Arytmetyka
Zauwaṡyli¶my , ṡe jednḟ z gġównych cech procesora DSP jest MAC, struktura sprzêtowa zdolna do wykonywania mnoṡenia, po którym nastêpuje dodawania. Ta operacja matematyczna jest wykonywana na cyfrowej reprezentacji liczby. Liczby mogḟ byæ reprezentowane w komputerze w formacie staġoprzecinkowym lub formacie zmiennoprzecinkowym. Naleṡy pamiêtaæ ,ṡe procesory DSP wystêpujḟ w tych dwóch wersjach a procesor zmiennoprzecinkowy.DSP jest znacznie droṡszy . Liczby staġoprzecinkowa sḟ podobne do znanych nam liczb caġkowitych. 16 bitowa liczba staġoprzecinkowa moṡe reprezentowaæ 216 = 65536 liczb. Ten zakres obejmuje okoġo 5 dekad zasiêgu (< 100 000) . Ale sḟ pewne problemy z formatem staġoprzecinkowym .Gdyby¶my pomnoṡyli dwie liczby staġe, np. 60 000 x 50 000, odpowiedỳ nie mogġaby byæ reprezentowana w 16 bitowym formacie staġoprzecinkowym. Aby rozwiḟzaæ taki problem z przepeġnieniem, moṡemy tymczasowo wymy¶liæ format "16 bitowego zmiennoprzecinkowego". Taki format jest niepraktyczny, ale ilustrujḟcy . Wielu ludzi zna notacjê naukowḟ, gdzie liczba moṡe byæ przedstawiona jako 2,71 x 1012, bardzo duṡa liczba. Zaġóṡmy ,ṡe przyjmujemy naszḟ 16 bitowḟ liczbê i dzielimy bity inaczej ,uṡywajḟc 10 bitów jako "mantysy" do reprezentowania liczby 2,171 i 6 bitów jako "wykġadnika" reprezentujḟcego 12 liczb w naszym przykġadzie. To daje naszym liczbom zmiennoprzecinkowym zakres okoġo 210 x 106, duṡo wiêkszy niṡ 65536. Jednak dokġadno¶æ to tylko 210 = 1024, zamiast 65536. Nasz przykġad mnoṡenia (60 000 x
50 000) moṡe byæ teraz wykonany poniewaṡ nie przepeġnia 6 x 104 x 5 x 104 = 30 x 108 = 3 x 109. Formaty zmiennoprzecinkowe uṡywane w komputerach sḟ nieco inne. Zmiennoprzeciwnkowo¶æ daje nam szerszy zakres liczb nad którymi moṡe siê odbywaæ arytmetyka.
Sprzêt DSP
Wiele arytmetycznych domen problemowych, na które patrzyli¶my, dotyczy wielu Mac'ów. Szereg Taylora, filtry FIR i FFT wymagajḟ wielokrotnego mnoṡenia wspóġczynników przez warto¶ci danych aby utworzyæ dġugie zsumowane równanie. Procesory DSP majḟ struktury adresujḟce pamiêæ i sprzêt sterujḟcy, który znacznie przyspieszajḟ takie powtarzalne operacje. W jêzyku matematycznym doskonale nadajḟ siê do arytmetyki wektorowej i macierzowej. Najbardziej zaawansowani uṡywajḟ równieṡ przetwarzania równolegġego ,aby przyspieszyæ te obliczenia. Procesory DSP sḟ czêsto uṡywane do przetwarzania równolegġego, aby przyspieszyæ te obliczenia. Procesory DSP sḟ czêsto uṡywane do przetwarzania ciḟgġych strumieni informacji takich jak audio, wideo lub dane z odbiornika RF. Strumieñ danych nigdy siê nie zatrzymuje i musi byæ przetwarzany przez caġy czas. Odpowiednio procesory DSP mogḟ mieæ buforowanie wbudowane w ich strumienie przetwarzania i unikaæ przerw w ruchu, które mogḟ zablokowaæ jednostkê centralnḟ ogólnego przeznaczenia (CPU). Pomy¶l przez chwilê o komputerze stacjonarnym. Jak czêsto blokuje siê podczas wykonywania niektórych zadañ porzḟdkowych? Takie blokady nie sḟ dozwolone w przetwarzaniu ciḟgġych danych strumieniowych, a procesory DSP mogḟ siê upewniæ ,ṡe tak siê nie stanie. Je¶li robot musi przetworzyæ ciḟgġe strumienie danych typu medialnego, rozwaṡ procesor DSP jako alternatywê.
Podstawowḟ zaletḟ procesorów ogólnego przeznaczenia jest ich szybko¶æ. Mogḟ wykonywaæ proste operacje z o¶lepiajḟcḟ prêdko¶ciḟ, dziêki czemu wykonujḟ ogromnḟ ilo¶æ pracy. Jak mamy znaleỳæ odpowiedni dla naszego robota? Komputery powstaġy podczas II wojny ¶wiatowej. Zostaġy wykonane przy uṡyciu lamp próṡniowych i powstaġy w celu zġamania kodów wroga. Nic dziwnego ,ṡe najlepszym wyborem dla robota jest najtañszy komputer, który wykonuje swojḟ pracê. Istnieje wiele wariantów projektowania spo¶ród setek dostêpnych komputerów. Aby wybraæ najlepszy komputer dla robota musimy byæ dobrze zaznajomieni z wnêtrzem maszyn. To da nam lepszḟ perspektywê gdy przyjdzie czas wyboru. Komputery majḟ podstawowe cechy i architektury, które zostaġy opracowane przez lata. Przyjrzymy siê kaṡdemu po kolei.
Rozmiar Sġowa
Komputery majḟ w sobie odpowiednik naturalnej wielko¶ci sġowa. Przechowujḟ one i manipulujḟ danymi cyfrowymi, które sḟ reprezentowane przez n bitów, z których kaṡdy reprezentuje 1 lub 0. 8- bitowy komputer ma 8-bitowe sġowa , które przechowujḟ liczby od 0 do 255. 16 bitowy komputer ma sġowa które przechowujḟ numery od 0 - 65536. Rozmiar sġowa komputera informuje uṡytkownika o ġatwo¶ci obsġugi komputera w celu ġatwego manipulowania liczbami. Im wiêkszy rozmiar sġowa, tym szybciej komputer bêdzie w stanie obsġuṡyæ obliczenia obejmujḟce duṡe liczby. Pierwsze nowoczesne chipy komputerowe to maszyny 4 bitowe. Caġa wewnêtrzna struktura 4 bitowych komputerów miaġy szeroko¶æ 4 bitów, wystarczajḟcḟ do przechowywania liczb od 0 do 15 dziesiêtnie. Ḋwietnie siê nadaje do zliczania ksiêṡyców Neptuna (8 ksiêṡyców) ale nie Jowisza (47 ksiêṡyców) . Aby policzyæ ksiêṡyce Jowisza, 4 bitowy komputer musiaġby uṡyæ 2 swoich sġów (8 bitów) co daġoby mu zdolno¶æ do zliczenia 256 ksiêṡyców Czterobitowy komputer nadal moṡe pracowaæ , ale bêdzie wolniejszy niṡ komputer 8 bitowy w tym samy zadaniu poniewaṡ musi wykonaæ co najmniej dwa razy wiêcej operacji. Nowoczesne mikroprocesory , które mogliby¶my wykorzystaæ w naszej ofercie robotów miedzy 8- i 64- bitowymi rozmiarów. Komputery 8 bitowe sḟ zwykle dobrze przystosowane do najprostszych obliczeñ robota i pêtli sterowania, ale nie jest to zbyt kosztowna propozycja spojrzenia na 16- i 32-bitowe komputery. Komputery z 64 bitowymi sġowami zaczynajḟ byæ drogie. Trzeba spojrzeæ na kilka gġównych kwestii przy wyborze dġugo¶ci sġowa komputera dla robota. Wiêkszo¶æ konstrukcji robotów ma 8- bitowe procesory, aby oszczêdzaæ energiê i pieniḟdze.
• Dġugo¶æ danych. Jak dobrze dġugo¶æ sġowa pasuje do danych strumienia, z którymi robot bêdzie miaġ do czynienia? Je¶li komputer zbiera dane wizyjne w 16- lub 24-bitowych sġowach, rozwaṡ uṡycie komputera 32 bitowego . Jest maġo prawdopodobne ,ṡe i tak bêdziemy musieli wykonaæ 32 bitowḟ arytmetykê. Je¶li wszystkie dane gromadzone w robocie generujḟ 8 bitowe dane, rozwaṡ 8 bitowḟ dġugo¶æ sġowa. Ale przyjrzyj siê dokġadnie wymaganej arytmetyce. Pamiêtaj ,ṡe nawet proste dodanie danych moṡe wymagaæ dodatkowych bitów dġugo¶ci sġowa. Je¶li dodamy dwie 8 bitowe liczby, moṡemy potrzebowaæ 9 bitowej liczby aby zapisaæ wynik. Przej¶cie do kolejnego najwiêkszej dġugo¶ci sġowa , komputer jest czêsto bezpieczny; moṡe byæ potrzebny 16 bitowy komputer
• Moc komputera. Nawet niewielki 4 bitowy komputer moṡe wykonywaæ wszystkie obliczenia wymagane w systemie sterowania robotem. Prawdziwe pytania brzmi : czy taki 4 bitowy komputer moṡe zrobiæ to wystarczajḟco szybko, aby nadḟṡyæ za wymaganiami robota? Je¶li zaprojektujemy robota bardzo ostroṡnie moṡemy zminimalizowaæ zapotrzebowanie na moc komputera. Chodzi o to ,ṡe je¶li dopasujemy komputer do wykonywanego zadania, moṡemy duṡo zyskaæ, minimalizujḟc to zadanie. Nastêpnie musimy wybraæ komputer wystarczajḟca duṡy aby wykonaæ zadanie.
• Rozmiar pamiêci. Czêsto szeroko¶æ sġowa komputera decyduje o szeroko¶ci sġowa bank pamiêci. Komputer 32 bitowy dziaġa najlepiej z 32 bitowym moduġem pamiêci . w zwiḟzku z tym dġugo¶æ sġowa moṡe równieṡ wpġywaæ na wielko¶æ i koszt pamiêci.
Zasilanie
Wiele robotów zasilanych jest z baterii. Zajmiemy siê póỳniej kwestiami zwiḟzanymi z zasilaniem ale powinni¶my wspomnieæ o ty. Aby oszczêdzaæ energiê , poszukaj w komputerze nastêpujḟcy funkcji
• Elektronika niskiego napiêcia
• Praca z maġḟ mocḟ
• Obsġuga oprogramowania operacyjnego dla stanów o niski poborze mocy
• Operacje z niṡszḟ czêstotliwo¶ciḟ (je¶li moṡemy znie¶æ wolniejszḟ pracê)
Obwód Wspomagania Pamiêci
Komputery wymagajḟ pamiêci do przechowywania swoich programów i danych. Pamiêæ moṡe byæ doġḟczana do komputera na kilka róṡnych sposobów. Oto kilka opcji
• Przechowywanie programu. Wiele pytañ zadano samym oprogramowaniu programu. Gdzie bêdzie przechowywany? Pamiêæ flash i dysk to dwie popularne metody. Pamiêæ flash jest bardziej niezawodna fizycznie, co jest waṡne , je¶li robot bêdzie mobilny. Przyjrzyjmy siê krótko obu rodzajom pamiêci. W jaki sposób program zostanie zmieniony? Zawsze dobrze jest zachowaæ moṡliwo¶æ uaktualnienia oprogramowania w robocie. Oznacza to ,ṡe potrzebujemy metody pobrania informacji o programie do robota. Moṡna to zrobiæ na wiele sposobów , w tym za po¶rednictwem kanaġu komunikacji. Je¶li robot ma kanaġ komunikacji ze ¶wiatem zewnêtrznym, moṡemy zakodowaæ polecenia w kanale, które umoṡliwiḟ przeprogramowanie oprogramowania robota. Je¶li robot znajduje siê w odlegġej lokalizacji (np. Mars), musieliby¶my to zrobiæ bardzo ostroṡnie. Akcentowana technika polega na uruchomieniu polecenia pobierania, wciḟgniêciu bloków danych programu z peġnym wykryciem i korektḟ bġêdów, przechowywanie programu w formie bloku aṡ wszystko dotrze , a nastêpnie wysġaniu go do pamiêci flash lub dysku. Je¶li to moṡliwe, umie¶æ pamiêæ flash stronicowania w robocie, aby program rozruchowy zawsze istniaġ i nie ulega zmianie. Program startowy moṡe pobraæ i nagraæ program flash. W ten sposób mamy minimalnḟ szansê na uszkodzenie programu do tego stopnia, ṡe nie mamy moṡliwo¶ci odzyskanie go. Kolejnḟ rzeczḟ do zapamiêtania na temat o pobieraniu na duṡḟ odlegġo¶æ jest to ,ṡe czêsto wystêpujḟ znaczḟce opóỳnienie w komunikacji. Protokóġ pobierania musi przetrwaæ wszystkie rodzaje bġêdów komunikacyjnych, w tym duṡe opóỳnienie w czasie transmisji. W przypadku jednej z misji lḟdowania na Marsie, mobilny robot mógġ byæ przeprogramowany tylko raz dziennie. Oprócz opóỳnieñ w komunikacji zespóġ przeprogramowujḟcy musiaġ uporaæ siê ze zmniejszonḟ przepustowo¶ciḟ komunikacji, rotacjḟ planety, plamami sġonecznymi i tak dalej. Ogólnie, przygotuj protokoġy komunikacyjne dla kuloodpornego robota. Oczekuj nieoczekiwanego. Nawet Marsjanie mogḟ pojawiæ siê i stanḟæ obok anteny. Sneaker Net jest innym sposobem na pozyskanie informacji o programie do robota. Gdy robot jest dostêpny, inṡynierowie mogḟ podej¶æ do niego i stwozyæ nowe zmiany w oprogramowaniu
• Zakres adresowania pamiêci. Komputery majḟ zestaw instrukcji, które kodujḟ adrsy, instrukcje sḟ przechowywane w pamiêci jako seria bitów .Pozwala to na bezpo¶edni dostêp do lokalizacji w pamiêci w celu odczytu ,zapisu lub modyfikacji. Aby zakodowaæ adres pamiêci w instrukcji, adres musi zajḟæ kilka bitów w instrukcji. Czêsto niektóre z bitów w instrukcji odwoġujḟ siê do inne rejestru z wieloma bitami do wypeġnienia adresu. Ostateczny adres jest nazywany adresem efektywnym. Liczba róṡnych adresów pamiêci do których moṡna uzyskaæ dostêp w dowolnym momencie ,zaleṡy od liczby bitów w adresie efektywnym. Róṡne instrukcje komputera bêdḟ miaġy dostêp do róṡnych zakresów adresów. Ogólnie rzecz biorḟc, dġugo¶æ sġowa komputera okre¶la najwiêkszy zakres adresów. 32 bitowy procesor moṡe ogólnie adresowaæ 232 bajtów (okoġo 4 miliardy bajtów). Procesroy z 8 lub 16 bitami generalnie uṡywaj16 bitowego zakresu adresów dla 65 tysiêcy bajtów. Zakres adresowania pamiêci jest waṡny poniewaṡ ograniczḟ liczbê bajtów pamiêci, którḟ komputer moṡe zobaczyæ w dowolnym momencie Je¶li oprogramowanie naszego robota analizuje wiele tysiêcy bajtów jednocze¶nie, zastanów siê czy 16 bitowy zakres adresowania jest wystarczajḟcy . Korzystanie z 32 bitowego komputera nie kosztuje duṡej ilo¶ci dodatkowych pieniêdzy. Je¶li komputer ma jednostkê zarzḟdzania pamiêciḟ (MMU), moṡliwe jest uzyskanie bardzo duṡego zakresu adresowania i obsġugi duṡej pamiêci.
• MMU. MMU to zestaw rejestrów w ukġadzie komputerowym, który umoṡliwia komputerowi dostêp do ogromnej tablicy pamiêci. Uṡyjmy wizualnego obrazu , aby opisaæ co MMU robi. Pomy¶l o tablicy pamiêci jak o ogromnym polu pszenicznym bajtów na zewnḟtrz. Pomy¶l o tym ,ṡe komputer znajduje siê w domu z oknem wychodzḟcym na pole bajtów. Komputer moṡe przetwarzaæ instrukcje ,aby manipulowaæ wszystkimi bajtami widocznymi poza oknem ale nie tymi których nie widzi. Teraz stwórzmy magiczne MMU, które moṡe przesuwaæ okno wokóġ ¶cian domu. MMU przechowuje lokalizacje okien i moṡe zapamiêtaæ kilka róṡnych lokalizacji dla okna (zwanych stronami) W rzeczywisto¶ci kaṡdy uṡytkownik komputera moṡe mieæ swoje wġasne poġoṡenie okna , i jako takie, prywatnḟ pamiêæ w polu bajtów. W ten sposób komputer moṡe obsġugiwaæ wielu uṡytkowników bez trudno¶ci w ich rozdzielaniu.
Ukġady Pamiêci
O tak! Wiêkszo¶æ pamiêci komputerowych zawiera ukġady pamiêci. Sḟ to ukġady scalone, które zawierajḟ tysiḟce lub miliony pojedynczych, które komputery moṡe odczytaæ i zapisaæ. Dostêpnych jest kilka roṡnych typów pamiêci i wszystkie przynoszḟ róṡne korzy¶ci projektowi robotów. Warto wiedzieæ o najpopularniejszych typach pamiêci i tym co mogḟ zrobiæ dla projektu robota
Pamiêæ Flash
Kaṡdy komputer potrzebuje miejsca do przechowywania jego programu operacyjnego. Program nie moṡe zniknḟæ po wyġḟczenia zasilania. Przy obecnej technologii prawie kaṡdy komputer trochê pamiêci flash, która zawiera poczḟtkowe oprogramowanie uruchamiane po uruchomieniu komputera. Ta sama pamiêæ flash moṡe zawieraæ wiêkszo¶æ lub caġo¶æ oprogramowania komputerowego. Podstawowḟ zaletḟ pamiêci flash jest to ,ṡe zachowuje ona swojḟ zawarto¶æ przy braku zasilania, czyniḟc jḟ pamiêciḟ nieulotnḟ. Nie zajmujmy siê tu fizykḟ. Flash moṡna zaprogramowaæ po zbudowaniu robota i zachowaæ program przez caġy okres eksploatacji robota. Wiêkszo¶æ pamiêci flash moṡna przeprogramowaæ w polu je¶li program musi zostaæ zmieniony. Poza przechowanie programu na komputerze, pamiêæ flash moṡe byæ uṡywana do trwaġego przechowywania innych danych, które robot moṡe zebraæ, prawie jak system dyskowy. Jedynym zastrzeṡeniem jest to ,ṡe wiele pamiêci flash moṡna zapisaæ tylko okre¶lonḟ ilo¶æ razy zanim ulegnḟ awarii. Specyfikacja ukġadu pamiêci flash bêdzie okre¶laæ, ile razy moṡna zapisaæ flash. Je¶li wiêc istnieje potrzeba nieulotnej pamiêci w danym momencie, rozwaṡ umieszczenie pamiêci flash w robocie. Czasami ten rodzaj pamiêci moṡna dodaæ do komputera robota za pomocḟ kart PCMCIA (Personal Computer Memory Card International Association)
Pamiêæ Statyczna
Jest to rodzaj pamiêci ulotnej, która jest wzglêdnie prosta w uṡyciu z perspektywy elektrycznej. Nie wymaga skomplikowanego timingu. Jednak pamiêæ statyczna jest generalnie mniejsze i wypadġy z ġaski. zwykle uṡywajḟ od dwóch do czterech tranzystorów dla przechowania tylko jednego bitu pamiêci , podczas gdy najtañsze pamiêci (pamiêæ dynamicznego dostêpu losowego DRAM) uṡywajḟ tylko jednego tranzystora dla przechowania bit.. Jedyna rzecz w której pamiêæ statyczna jest dobra to kopia zapasowa baterii. Pamiêæ statycznḟ moṡna uczyniæ nieulotnḟ z dodatkiem baterii. Czêsto ġḟczy siê je z bateriami litowymi lub podobnym, które majḟ dġugi okres trwaġo¶ci. Niektóre rodzaje pamiêci statycznych zuṡywajḟ bardzo maġo energii, gdy sḟ wyġḟczone i mogḟ przechowywaæ waṡne dane przez dġugi czas
Pamiêæ Dynamiczna
Wiêkszo¶æ komputerów korzysta z pamiêci flash dla nieulotnego programu rozruchowego i pamiêci dynamicznej dla wiêkszo¶ci niestabilnej przestrzeni pamiêci. Czêsto zdarza siê ṡe caġy program komputerowy jest przechowywany w pamiêci flash, przenoszony do pamiêci dynamicznej i wykonywany z tego miejsca. Powodem jest to ,ṡe szybko¶æ wykonywania z pamiêci dynamicznej jest czêsto szybsza. Aby zrozumieæ dlaczego ,musimy tym razem przej¶æ do fizyki DRAM zachowuje siê tak jak robi to z jednego podstawowego powodu uṡywa tylko jednego tranzystora do przechowywania. Robi to , wykorzystujḟc czê¶æ pojemno¶ci pod tranzystorem. Kondensator to w zasadzie miejsce do przechowywania elektronów. Liczba elektronów w kondensatorze okre¶la czy binarna jedynka lub zero istniejḟ w bicie. Bit danych w formie napiêcia moṡna przenie¶æ do tranzystora. Nastêpnie tranzystor moṡe umie¶ciæ dane w kondensatorze, po prostu wġḟczajḟc go. Je¶li dane , reprezentowane przez napiêcie to jeden wtedy elektrony wpadajḟ do kondensatora . Je¶li dane to zero, kondensator jest pozbawiony elektronów. Gdy nadejdzie czas odczytu bitów danych, tranzystor wġḟcza siê , a liczba elektronów w kondensatorze jest kontrolowana. Je¶li jest ich wystarczajḟco duṡo, komputer odczytuje jeden jeden. DRAM jest bardzo gêsty , poniewaṡ potrzebuje tylko jednego tranzystora na bit, co pozwala zaoszczêdziæ miejsce na samym obwodzie scalonym. Jednak z tḟ strukturḟ pamiêci wystêpujḟ pewne problemy. Na poczḟtek sam odczyt bitu niszczy go. Nazywa siê to odczytem destrukcyjnym. Natychmiast po odczytaniu bitu obwód podtrzymujḟcy pamiêæ w komputerze musi przepisaæ bit danych z powrotem do kondensatora. Pojawia siê takṡe inny problem. Gdy tylko trochê zostanie zapisane w kondensatorze pod tranzystorem, zaczyna siê pogarszaæ. Elektrony w kondensatorze zaczynajḟ przeciekaæ jedne po drugim. Zajmuje to tylko kilka milisekund, zanim integralno¶æ bitu danych moṡe zostaæ zakwestionowana. Odpowiednio, wiele ukġadów pamiêci ,ma wbudowane w nie
obwody aby automatycznie odczytywaæ kaṡdy bit i przepisywaæ co kilka milisekund. Ten proces nazywa siê od¶wieṡaniem . Niektóre komputery wykonujḟ tê operacjê za pomocḟ od¶wieṡania obwodów wewnḟtrz samego ukġadu komputerowego. Zachowaj ostroṡno¶æ podczas przemy¶lenia schematu od¶wieṡania podczas wybierania pamiêci dla robota. Przynajmniej jeden z chipów musi obsġuṡyæ zadanie od¶wieṡania. Jedynḟ z innych wad pamiêci DRAM jest zġoṡony czas wymagany dla sygnaġów. Dowiemy siê jak dziaġa DRAM w ciḟgu minuty, ale zġoṡony czas sygnaġów wywoġuje dwa problemy. Przede wszystkim nie ma prawie ṡadnej moṡliwo¶ci na spanie komputera, aby zaoszczêdziæ energiê. Przy wszystkich sygnaġach dziaġajḟcych caġy czas, pamiêæ DRAM generalnie nie moṡe przej¶æ do trybu niskiego poboru mocy. Je¶li tryb u¶pienia o niskiej mocy jest waṡny dla projektu robota, naleṡy rozwaṡaæ SRAMS. Po drugie, je¶li budujemy wġasny komputera od zera, bardzo ostroṡnie analizuj czas sygnaġów DRAM. Je¶li nawet trochê odbiegajḟ od wymagañ , mogḟ wystḟpiæ bġêdy, które trudno bêdzie wyizolowaæ. Aby poprawnie uṡywaæ DRAM, musimy przyjrzeæ siê jego wewnêtrznej konstrukcji. DRAM jest zwykle budowany jako tablica bitów. Jeṡeli miliony bitów ( 1 024 x 1 024 = 1 milion) znajduje siê wewnḟtrz pamiêci DRAM, bity mogḟ byæ rozmieszczone jako 1 duṡa macierz z 1024 kolumnami, z których kaṡda ma 1024 bity w wierszu. Linie adresowe wchodzḟce do DRAM sḟ zazwyczaj podzielone. Aby zaadresowaæ 1 milion bitów wewnḟtrz DRAM, wymaganych jest 20 bitów adresy (210 = 1 milion). Zamiast 20 pinów adresowych pamiêci DRAM, ma ona prawdopodobnie tylko 10 i sḟ uṡywane dwa razy w nastêpujḟcy sposób. Pierwsze 10 bitów adresu jest przedstawianych pamiêci DRAM. Te 10 bitów adresu moṡe adresowaæ caġy rzḟd bitów w tablicy pamiêci. Ten cykl nazywa siê RAS ,Row Address Select. W tym czasie caġy zaadresowany wiersz zawierajḟcy 1024 bity pamiêci jest odczytywany do rejestru odczytu RAS wewnḟtrz pamiêci DRAM. Nastêpnie ukġad komputerowy dostarcza pozostaġe 10 bitów adresu ma wej¶ciowe piny DRAM podczas tzw. cyklu CAS , Column Address Select. Podczas cyklu CAS, tylko jeden z 1024 bitów pamiêci z rejestru odczytu RAS jest wysyġany na pin wyj¶ciowy DRAM. Jest to cykl RAS/CAS. Ten typ architektury oszczêdza duṡo przestrzeni i obwodów wewnḟtrz pamiêci DRAM i staġ siê standardem w branṡy komputerowej. Czas wszystkich sygnaġów DRAM musi byæ bardzo dokġadny aby uniknḟæ bġêdów. Wiêkszo¶æ chipów komputerowych dostêpnych na rynku bêdzie obsġugiwaæ DRAM bezpo¶rednio z domy¶lnym taktowaniem znanym ze wspóġpracy ze wspóġczesnḟ pamiêciḟ DRAM. Wiêkszo¶æ chipów komputerowych ma równieṡ w sobie rejestry , które moṡna wykorzystaæ do zmiany domy¶lnego taktowania pinów interfejsu DRAM komputera. Jednḟ z interesujḟcych korzy¶ci z cyklu RAS/CAS jest to ,ṡe w naszym przykġadzie 1024 bity sḟ pobierane w tym samym czasie podczas cyklu RAS. To tylko preferencja, ṡe chcemy tylko jeden bit podczas cyklu CAS. Prawda jest taka ṡe je¶li uruchomimy wiele cykli CAS po pojedynczym cyklu RAS, moṡemy pobraæ wiele bitów z rejestru odczytu RAS. Ta metoda korzystania z DRAM jest ogólnie nazywana trybem strony i nie obsġuguje go caġa pamiêæ DRAM. Nastêpna sekcja po¶wiêcona pamiêci podrêcznej zilustruje dobre wykorzystanie tej funkcji. DRAM wystêpuje w wielu róṡnych stylach, kaṡdy z innym akronimem. Kaṡdy z nich ma inne wymagania dotyczḟce czasu i mocy.
Pamiêæ Podrêczna
Ḋwietnie, wġa¶nie wtedy gdy my¶leli¶my ,ṡe mamy tê pamiêæ policzonḟ, nadchodzi kolejna. Pamiêæ podrêczna jest niewielka ilo¶æ pamiêci wewnḟtrz chipu komputerowego, która znacznie przyspiesza wykonywanie programu. Gġównḟ ideḟ jest to ,ṡe zewnêtrzne mikroukġady pamiêci DRAM na chipie komputerowym zabierajḟ duṡo czasu, aby dostarczyæ je do wnêtrza ukġadu komputerowego, moṡe nawet 60 ns. To moṡe wydawaæ siê dġugotrwaġe, ale je¶li weỳmiemy pod uwagê, ṡe ukġad komputerowy moṡe wykonywaæ polecenia co 10 ns, traci duṡo czasu na oczekiwanie na instrukcje, aby wyj¶æ z pamiêci. To co robi pamiêæ podrêczna, to doglḟdanie dostêpu do pamiêci zewnêtrznej. Je¶li obwód sterujḟcy pamiêci podrêcznej wewnḟtrz ukġadu scalonego komputera jest przekonany ,ṡe juṡ wie, jaka jest zawarto¶æ adresu pamiêci, powoduje to przerwania cyklu pamiêci ukġadu scalonego i po prostu pobiera dane z wġasnej pamiêci podrêcznej. W ten sposób instrukcja bêdzie wykonywana od dwóch
do sze¶ciu razy szybciej. £atwo jest uṡywaæ pamiêci podrêcznej, poniewaṡ jest ona przeỳroczysta dla programisty. Pamiêæ podrêczna jest po prostu wġḟczona i automatycznie dziaġa w celu przyspieszenia wykonywania programu. Wiele programów komputerowych bêdzie wykonywanych w ciasnych pêtlach przez krótki czas. Wykonanie pêtli FOR w C jest typowym przykġadem. Pêtle FOR wykonujḟ te same instrukcje dla okre¶lonej liczby iteracji. Podczas wykonywania pêtli FOR, program w C wykonuje te same instrukcje w kóġko. Je¶li te instrukcje zostanḟ umieszczone w pamiêci podrêcznej, pêtla FOR bêdzie dziaġaæ znacznie szybciej. Z reguġy wiêkszo¶æ programów bêdzie wykonywaġa w takich "lokalnych" pêtlach znaczny procent czasu. Jest to prawdziwa moc wykorzystywana struktury pamiêci podrêcznej w procesorze. Nawet niewielka ilo¶æ pamiêci podrêcznej przechodzi dġugḟ drogê. Zasadniczo tylko szybsze ukġady komputerowe ,majḟ ukġad obwodów pamiêci podrêcznej, poniewaṡ tylko one mogḟ z niej naprawdê skorzystaæ. Jak dziaġa pamiêæ podrêczna? Najpierw opiszemy bardziej zġoṡonḟ strukturê pamiêci podrêcznej, póỳniej przyjrzymy siê uproszczeniu. Przede wszystkim pamiêæ podrêczna zwykle ma zaledwie kilka tysiêcy sġów. Kaṡde z tych sġów moṡe zawieraæ zarówno peġne sġowo danych pamiêci (duplikowanie zawarto¶ci adresu pamiêci DRAM), jak i sam adres pamiêci DRAM. Poniewaṡ komputer odczytuje dane adresu DRAM, za pierwszym razem, kontroler pamiêci podrêcznej umieszcza dane i adres w pamiêci podrêcznej w tym samym czasie. Póỳniej, je¶li program komputerowy odczyta ten adres DRAM pamiêæ podrêczna rozpozna adres jako dopasowanie, zwróci uwagê komputera szybko zastḟpi dane z pamiêci podrêcznej i zmniejszy dostêp do pamiêci. Poniewaṡ program kontynuuje dostêp do adresów DRAM w maġej "pêtli lokalnej", wszystkie dane z tych adresów sḟ równieṡ umieszczane w pamiêci podrêcznej. Poniewaṡ program kontynuuje przeglḟdanie tych adresów DRAM pamiêæ podrêczna postêpuj naprzód z danymi i dziaġa w celu przyspieszenia pracy komputera. Gdy program przejdzie do innej czê¶ci programu, nowe dane zostanḟ zapisane w pamiêci podrêcznej. Ale co siê dzieje, gdy pamiêæ podrêczna siê zapeġni? Ogólnie rzecz biorḟc , kontroler pamiêci podrêcznej ma sprzêt który bada najmniej uṡywane sġowa w pamiêci podrêcznej. Kiedy nowa lokalizacja jest wymagana dla danych pamiêci podrêcznej, kontroler wybiera najmniej uṡywanḟ lokalizacjê pamiêci podrêcznej, zrzuca stare , nieuṡywane dane i umieszcza w niej nowe dane pamiêci podrêcznej. Na marginesie, kiedy dane sḟ zapisywane w pamiêci, która jest równieṡ buforowana, dane sḟ zapisywane w pamiêci w tym samym czasie, w którym sḟ zapisywane w prawdziwej pamiêci DRAM. W ten sposób dane pamiêci podrêcznej pozostajḟ takie same jak zawarto¶æ pamiêci DRAM. Kontroler pamiêci podrêcznej musi rozpoznawaæ , kiedy musi dziaġaæ gdy komputer uzyskuje dostêp do adresu DRAM. Najbardziej zġoṡonḟ metodḟ jest przechowywanie adresu DRAM wewnḟtrz pamiêci podrêcznej. Kontroler pamiêci podrêcznej musi wówczas mieæ sprzêt dopasowujḟcy adres , który moṡe porównaæ wygenerowany komputerowo adres DRAM ze wszystkimi adresami w banku pamiêci podrêcznej. ten rodzaj sprzêtu jest drogi i jest ogólnie znany jaki Content Addressable Memory (CAM). Mniej kosztownḟ alternatywḟ jest po prostu buforowanie tylko w niewielkim zakresie adresów. Je¶li komputer moṡe buforowaæ wszystkie dane DRAM znajdujḟce siê w okre¶lony zakresie adresów pamiêci, rzeczy sḟ upraszczane. Kontroler pamiêci podrêcznej musi jedynie porównywaæ górne bity adresu wygenerowanej przez komputer pamiêci DRAM z adresem buforowanego zakresu pamiêci. Pamiêæ podrêczna moṡe znajdowaæ siê w kilku róṡnych miejscach. Je¶li znajduje siê w ukġadzie procesora, zwykle jest to pamiêæ podrêczna pierwszego poziomu (L1) Jest najszybszy i poniewaṡ jest w ukġadzie komputerowym, jest na ogóġ najmniejszy i najdroṡszy. Projektanci pġyt mogḟ równieṡ umieszczaæ ukġady pamiêci podrêcznej pomiêdzy chipem komputera i DRAM. Ta pamiêæ podrêczna ,poza ukġadem procesora, jest ogólnie nazywana pamiêciḟ podrêcznḟ Level 2 (L2). Czasami pamiêæ podrêczna L2 znajduje siê równieṡ wewnḟtrz ukġadu komputerowego. Pamiêæ podrêczna L2 jest wolniejsza niṡ L1, ale czêsto jest wiêksza. Kontroler pamiêci podrêcznej najpierw sprawdza pamiêæ podrêczna L1. Je¶li pamiêæ podrêcznḟ L1 nie ma danych, kontroler pamiêci podrêcznej sprawdza pamiêæ podrêcznḟ L2. Je¶li pamiêæ podrêczna L2 nie ma danych, kontroler pamiêci podrêcznej przechodzi do pamiêci DRAM.
Cache Trashing
Jak widziaġe¶, pamiêæ podrêczna jest najbardziej efektywna, gdy program komputerowy jest pêtlḟ w maġej pêtli lokalnej czê¶æ programu ogranicza siê do niewielkiej liczby adresów pamiêci DRAM, które mogḟ znajdowaæ siê w pamiêci podrêcznej w tym samym czasie. Moṡliwe jest niewġa¶ciwe uṡycie pamiêci podrêcznej. Rozwaṡmy program , który omija wszystkie miejsca w pamiêci. Kontroler pamiêci podrêcznej nie moṡe byæ efektywny, je¶li nie moṡe przechowywaæ wszystkich instrukcji w pamiêci podrêcznej w tym samym czasie. Jest ciḟgle proszona o umieszczenie nowych lokalizacji w pamiêci podrêcznej i jest nieefektywna. Mówi siê , ṡe programista "wyrzuca pamiêæ podrêcznḟ" Powtórz to piêæ razy szybko! Bḟdỳ ostroṡny przy projektowaniu oprogramowania robota, którego wykonanie programu nie przeskakuje za szybko. W wiêkszych , bardziej zġoṡonych procesorach komputerowych (takich jak StrongARM), moṡliwe jest ograniczenie wykorzystania pamiêci podrêcznej do okre¶lonych zakresów pamiêci, a tym samym unikanie obszarów programu komputerowego, które zrzuca pamiêæ podrêcznḟ bez pozytywnych korzy¶ci. Przy okazji pamiêæ podrêczna moṡe równieṡ przechowywaæ i na¶ladowaæ zawarto¶æ pamiêci flash.
Interakcja Pamiêci Podrêcznej Z DRAM
Wspomnieli¶my wcze¶niej ,ṡe DRAM moṡe byæ uṡywana w trybie stronicowania. Gdy procesor z nowoczesnym kontrolerem pamiêci podrêcznej (takim jak Xscale StrongARM) odczytuje adres DRAM, nie czyta tylko jednej instrukcji . Poniewaṡ Dam pobiera 1024 bitów jednocze¶nie podczas cyklu RAS, procesor moṡe wykonaæ ,na przykġad, 16 cykli CAS, aby wypeġniæ pamiêæ podrêcznḟ kolejnymi sġowami z pamiêci. Jest to bardzo czasochġonny sposób na wypeġnienie pamiêci podrêcznej. Procesor ma inne zadania zwiḟzane z pobranḟ instrukcjḟ , podczas gdy kontrole pamiêci podrêcznej jest zajêty przeciḟganiem sġów z pamiêci za pomocḟ cyklów CAS z trybu stronicowania. Wadḟ takiego dziaġania jest to ,ṡe trudno jest monitorowaæ dziaġania procesora na zewnḟtrz , po prostu obserwujḟc aktywno¶æ na liniach adresu pamiêci.
Rejestry Obliczeniowe I Przechowujḟce
Kaṡdy ukġad komputerowy jest w stanie wykonywaæ funkcje arytmetyczne i logiczne. Zawieraj ukġady obliczeniowe, które mogḟ dodawaæ i odejmowaæ sġowa o dġugo¶ci sġowa przy prêdko¶ci instrukcji. Z pewno¶ciḟ waṡne jest ,aby przeanalizowaæ wymagania dotyczḟce robota i obliczenia arytmetyczne, które bêdḟ konieczne. Pomówimy o tym póỳniej, ale waṡne jest aby zwróciæ uwagê na jednḟ lub dwie rzeczy tu. Po pierwsze , komputery zawierajḟ zapasowe rejestry dġugo¶ci sġowa, które sḟ uṡywane do przechowywania wyników po¶rednich, gdy nie sḟ uṡywane. Je¶li obliczenia obsġugujḟ wiele róṡnych liczb w tym samym czasie, komputer z wieloma zapasowymi rejestrami (zwanymi rejestrami ogólnego przeznaczenia [GP]) moṡe czêsto wykonywaæ obliczenia z wiêkszḟ szybko¶ciḟ. Aby skorzystaæ z tej moṡliwo¶ci, czêsto musimy bardzo dokġadnie przyjrzeæ siê oprogramowaniu i kompilatorowi (je¶li taki istnieje) Czêsto kompilator automatycznie unika uṡywania rejestrów GP, preferujḟc zamiast tego wolniejsze lokalizacje pamiêci. Dzieje siê tak , aby kompilator byġ dostêpny na wielu róṡnych komputerach , z których niektóre majḟ niewiele rejestrów GP. Je¶li mamy specyficzne procedury programowe (takie jak pêtle w oprogramowaniu system sterowania robota), które chcemy przyspieszyæ, moṡemy zwróciæ szczególnḟ uwagê na ten maġy obszar kodu. Czêsto z instrukcjami jêzyka C takimi jak konstrukcja rejestru, moṡemy wymusiæ na kompilatorze generowania kodu, który bêdzie wykorzystywaġ szybsze rejestry GP podczas obliczeñ. Nadal musimy sprawdziæ kod po¶redni, aby upewniæ siê ,ṡe otrzymujemy poṡḟdane rezultaty. Oczywi¶cie je¶li kod robot jest zapisany w kodzie asemblera, moṡna znacznie przyspieszyæ ten proces. Weỳmy pd uwagê strukturê wewnêtrznego rejestru komputera podczas wybierania komputera lub projektowania oprogramowania. Pod drugie, naleṡy pamiêtaæ, ṡe niektóre majḟ wiêcej sprzêtu obliczeniowego niṡ inne .Wszystkie komputery majḟ
staġe moṡliwo¶ci obliczeniowe a niektóre z nich majḟ równieṡ zmiennoprzecinkowe moṡliwo¶ci . Inne
,jak juṡ wspominali¶my, majḟ bardzo specjalne jednostki obliczeniowe z wbudowanym DSP lub sprzêtem komunikacyjnym. Ponownie przyjrzyjmy siê wymaganiom komputera.
Zbiór Instrukcji
Zbiór instrukcji jest jêzykiem podstawowym komputera. Sḟ to zazwyczaj dġugo¶ci sġowa asemblerowego, na które komputer moṡe spoglḟdaæ, aby zrozumieæ co musi zrobiæ podczas wykonywania programu. Nie ma znaczenia, czy program jest w jêzykach C, Forth, C++, fortran lub asemblerze. Kompilatory i asemblery zawsze muszḟ redukowaæ program do szeregu zbioru poleceñ , które komputer moṡe wykonaæ. W jêzyku asemblera wyglḟdajḟ mniej wiêcej tak:

Po przetġumaczeniu na warto¶ci binarne, bêdḟ znajdowaæ siê w takich sġowach instrukcji jak te :
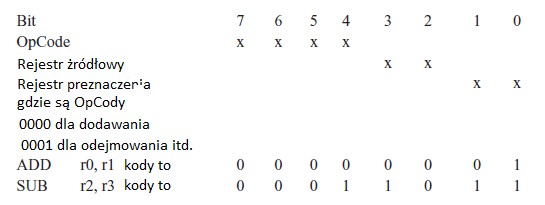
Te instrukcje sḟ dekodowane z duṡḟ prêdko¶ciḟ wewnḟtrz komputera i sḟ wykonywane natychmiast. Wiele lat temu, firmy komputerowe budowaġy komputery wielko¶ci lodówek i staraġy siê sprzedawaæ klientom bogactwo zestawów instrukcji. Prawda jest taka ,ṡe prawie nikogo to nie obchodzi. Ludzie kupujḟ komputery z zupeġnie innych powodów niṡ ten. Dlaczego wiêc mamy siê tym przejmowaæ? Je¶li budujemy robota i obserwujemy nasz budṡet, powinni¶my ostroṡnie wybraæ komputer. Niektóre chipy komputerowe bêdḟ lepiej odpowiadaæ naszym wymaganiom niṡ inne. Patrzḟc na to w inny sposób, majḟc mocniejszy ukġad komputerowy, czêsto moṡemy zaoszczêdziæ dostosowujḟc algorytmy robota do mocy komputera. Spójrzmy wiêc na niektóre rodzaje zbiorów instrukcji.
RISC
RISC oznacza Reduced Instruction Set Computer. Wyimaginowany 8 bitowy zestaw instrukcji pokazany wcze¶niej jest podobny do zbioru instrukcji RISC. Instrukcje sḟ elementarne i generalnie mogḟ wykonywaæ tylko maġe obliczenia w danym czasie. Maszyny RISC miaġy czerpaæ moc z o¶lepiajḟcej szybko¶ci, nawet w porównaniu z bardziej zġoṡonymi zestawami instrukcji. Komputery RISC byġy reklamowane dekady temu jako duṡy postêp w sprzêcie komputerowym, zaprojektowanym w celu znacznego przyspieszenia obliczeñ. Technologia ta w ṡaden sposób nie podbiġa ¶wiata komputerów. Wiele projektów komputerowych RISC wciḟṡ istnieje, takich jak MIPS, ARM i inne. Generalnie majḟ one mniejsze, prostsze matryce póġprzewodnikowe i mogḟ byæ ġatwiej zintegrowane z ASICS niṡ wiêksze komputery rdzeniowe. Ale nie znalazġy swojej niszy z powodu swej szybko¶ci. Przeciwnie, znalazġy swoje miejsce w projektach o niskiej mocy i wzglêdnej moṡliwo¶ci przenoszenia projektów.
CISC
Complex Instruction Set Computers (CISC) to normḟ od czasu komercyjnego wykorzystywania komputerów. Instrukcje sḟ duṡo bardziej zġoṡone niṡ te w urzḟdzeniach RISC (stḟd nazwa). Chociaṡ maszyna CISC moṡe nadal zawieraæ instrukcje ADD (dodawania) i SUB (odejmowania) moṡe równieṡ zawieraæ instrukcje MPY (mnoṡenia), DVD (dzielenia), ECC (sprawdzanie i korygowanie bġêdów) i MAC (mnoṡenie i akumulacja), które wykonujḟ skomplikowane obliczenia. Instrukcja MPY zwykle wymaga szeregu ADD i SHIFT. Instrukcja DVD wymaga serii SUB i SHIFT. MAC wymaga co najmniej MPY i ADD. Budowanie obwodów sterujḟcych w komputerze moṡe byæ bardzo kosztowne, poniewaṡ moṡe zarzḟdzaæ cyklami w tak zġoṡonej instrukcji. Wiêkszo¶æ projektantów procesorów zbudowaġa procesor uCode (mikrokodu), w procesorze komputera. W efekcie ,maġy, bardzo szybki procesor uCode RISC bêdzie w procesorze CISC. Program uCode byġby osadzony w szybkiej pamiêci tylko do odczytu (ROM), i wykonaġby bardzo krótkḟ seriê cykli maszynowych uCoded w celu wykonania zamierzonej instrukcji CISC. Kod dla instrukcji MPY x,y wyglḟdaġby tak:
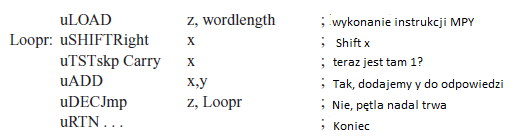
Program uCode wykona seriê przesuniêæ i dodawañ dla osiḟgniêcia MPY. Zaletḟ zestawu instrukcji uCoding jest to ,ṡe sprzêt CISC moṡe byæ uproszczony. Wiele instrukcji CISC moṡe byæ kodowanych za pomocḟ zaledwie kilku wpisów w pamiêci ROM z kodami uCode. Zestaw instrukcji CISC moṡe wymagaæ wiêcej czasu aby wykonaæ program, ale skompilowane programy C (dostarczane przez uṡytkowników) miaġyby mniejszḟ liczbê bajtów. Niektóre procesory uCoded umoṡliwiajḟ uṡytkownikom koñcowym dostarczenie kodu uCode, który moṡe byæ wykonany z szybkiej pamiêci RAM wewnḟtrz silnika uCode. Ta funkcja jest próbḟ projektantów CISC uchwycenia niektórych zalet architektury RISC. Uṡytkownicy koñcowi mogḟ skutecznie tworzyæ wġasne instrukcje. Jest to przydatne , je¶li robot ma jeden lub dwa proste algorytmy, które muszḟ dziaġaæ szybciej. Jednak zapisywanie kodu uCode moṡe byæ bardzo tudne. Dokumentacja czêsto nie jest dobra, a wsparcie czêsto jest gorsze . Gġówna zaletḟ urzḟdzenia uCodec CISC jest bogactwo zestawu instrukcji. Wielu projektantów maszyn CISC dostarcza specjalistycznych instrukcji które mogḟ byæ przydatne w konkretnych okoliczno¶ciach. Niektóre komputery CISC bêdḟ miaġy okre¶lone instrukcje dotyczḟce przetwarzania ciḟgġych strumieni danych , które mogḟ pochodziæ interfejsów komunikacyjnych. Staje siê to prawie przeplatane z urzḟdzeniami DSP. Je¶li robot potrebuje specjalizowanych instrukcji lub przetwarzania danych , poszukaj ich w zestawie instrukcji CISC rozwaṡanych procesorów. Procesory Pentium majḟ zestaw instrukcji Multimedia Etenxsion (MMX) i pewne konstrukcje , które sḟ dobre dla przetwarzania danych wektorowych. Niektóre maszyny CISC dostarczajḟ instrukcje zmiennoprzecinkowe, które mogḟ znacznie przyspieszyæ niektóre algorytmy . Inne zapewniajḟ instrukcje komunikacyjne, takie jak obliczanie wielomianów ECC i kodów Viterbiego.
Koprocesory
Chcḟc zapewniæ dodatkowḟ moc procesorów, niektórzy projektanci tworzḟ parê procesorów razem. Procesory klasy Pentium mogḟ dziaġaæ w tandemie. Dziêki temu te same programy dziaġajḟ nieco szybciej bez znaczḟcych modyfikacji . Inni projektanci poġḟczyli procesory o róṡnych moṡliwo¶ciach. PowerPC firmy Motorola jest w takiej samej klasie. Drugi procesor jest nazywany jest procesorem komunikacyjnym i jest zarezerwowany prawie wyġḟcznie na uṡytek projektantów procesorów .Motorola w celu zapewnienia przetwarzania komunikacji. Jest to prosta maszyna RISC, która nie jest udokumentowana dla uṡytkowników koñcowych. Jest uṡywany , na przykġad, do zapewnienia przetwarzania niezbêdnego do wdroṡenia interfejsów LAN (sieci lokalnej) . Procesor komunikacyjny moṡe obsġuṡyæ jednocze¶nie kilka interfejsów komunikacyjnych, ograniczonych jedynie caġkowitḟ przepustowo¶ciḟ koprocesora. Inne protokoġy komunikacyjne, takie jak ATM, Sonet i inne, sḟ dostêpne jako kompletny kod uCode, który moṡna zaġadowaæ do koprocesora i rozpoczḟæ. Je¶li uda nam siê znaleỳæ procesor o znacznej mocy przetwarzania moṡna go wykorzystaæ go do przetwarzania równolegġego. nowo wprowadzone procesory sieciowe mogḟ byæ uṡywane w ten sposób. Jest to w zasadzie wiele procesorów RISC w jednym chipie. Sḟ uṡywane do przetwarzania pakietów w Internecie, zadania, które moṡna podzieliæ na partycje i wymaga duṡej mocy. Te ukġady sḟ dostêpne w Vitesse, IBM, Mototrola i wielu innych. Do tej pory byġy one uṡywane tylko do przetwarzania sieciowego, które obsġuguje pakiety IP w czasie rzeczywisty, ale sḟ bardzo wydajnymi maszynami do przetwarzania równolegġego i mogḟ dziaġaæ dobrze w systemie sterowania robotem.
Input/Output (I/O)
Bez wzglêdu na to jak dobry jest procesor, nie ma sensu , je¶li nie moṡe komunikowaæ siê ze ¶wiatem zewnêtrznym. Komputer moṡe przetwarzaæ informacje tak szybko jak najwolniejsze ġḟcze w swoim ġañcuchu komunikacyjnym. Poza tradycyjnym wej¶ciem/wyj¶ciem (I/O) , do którego dojdziemy za chwilê, inne ¶cieṡko komunikacyjne w komputerze mogḟ go spowolniæ Je¶li pamiêæ jest zbyt wolna dla procesora, wszystko zwalnia. Podczas projektowania systemu robota po raz pierwszy naleṡy bardzo uwaṡnie analizowaæ wymagane przepustowo¶ci komunikacyjne w caġym obwodzie komputera. Pomy¶l o osobie niewidomej. Niewidomy moṡe z pewno¶ciḟ my¶leæ szybko i wymy¶laæ rzeczy, ale moṡe zajḟæ mu wiêcej czasu niṡ wiêkszo¶ci aby przyswoiæ wizualne lub drukowane materiaġy za pomocḟ Braille'a. Jako taka, osoba niewidoma moṡe nie byæ najlepszym wyborem jako kontroler ruchu lotniczego. Ḋwiat jest dopasowany do ludzi widzḟcych i dlatego czêsto stawia osoby niewidome w gorszej sytuacji. Jednak niewidomi mogḟ mieæ zalety w sytuacjach, w których ich specjalnie wyszkolone umiejêtno¶ci sġyszenia wychodzḟ na pierwszy plan. Tak wiêc niektóre procesory majḟ wiêkszḟ przepustowo¶æ we/wy niṡ inne. Je¶li architektura systemu robota wymaga aby procesor przetrawiaġ i przetwarzaġ wszystkie bajty przychodzḟce w interfejsie LAN 1000BT z peġnḟ prêdko¶ciḟ, to caġkiem niezġy zakġad, ṡe nie bêdzie ṡadnych 8 bitowych procesorów, które poradzḟ sobie z tym. Musimy oceniæ wiele miejsc wewnḟtrz sprzêtu komputerowego aby ustaliæ ,czy wystarczajḟca przepustowo¶æ bêdzie w stanie obsġuṡyæ rozwaṡany projekt.. Poniṡej rozwaṡmy nastêpujḟce skġadniki komputera.
Magistrale
Magistrala to ¶cieṡka komunikacyjna wewnḟtrz komputera , który przenosi dane z jednego miejsca do innego. Ogólnie rzecz biorḟc, magistrala jest zbiorem ¶ladów drutu na pġytce drukowane z protokoġem, który definiuje znaczenie sygnaġów na ¶cieṡkach. Nie jest moṡliwe umieszczenie wiêkszej ilo¶ci danych w magistrali niṡ w protokole, który moṡe obsġuṡyæ. W rzeczywisto¶ci rzadko siê zdarza ,ṡe moṡna uzyskaæ peġnḟ, nieprzetworzonḟ przepustowo¶æ magistrali. Planujḟc projekt systemu, rozsḟdnie jest zmniejszyæ prêdko¶æ magistrali od 50 do 80 procent reklamowanej przepustowo¶ci. Jest to najprawdopodobniej najszybsza szybko¶æ z jakḟ bêdziemy mogli przesyġaæ bajty przez magistralê. Magistrale sḟ zwykle projektowane przez komitety branṡowe w celu rozwiḟzania konkretnych problemów transferu danych. Czêsto magistrala zostanie zaprojekowana aby umoṡliwiæ wiele producentom zbudowanie kompatybilnego sprzêtu. Magistrale majḟ charakterystyki takie jak szeroko¶æ (analogiczna do dġugo¶ci sġowa), szeroko¶æ pasma w bajtach na sekundê, napiêcie i obciḟṡenie. Obciḟṡenie okre¶la liczbê oddzielnych urzḟdzeñ , które mogḟ byæ podġḟczone do magistrali w tym samym czasie. W wiêkszo¶ci systemów komputerowych stosuje siê wiele magistral. Aby upewniæ siê ,ṡe porównujemy przepustowo¶æ kaṡdej magistrali z wymaganiami okre¶lonym przez architekturê systemu, waṡne jest aby wymieniæ kaṡdḟ magistralê w komputerze. Niektóre magistrale sḟ ukryte przed wiêkszo¶ciḟ uṡytkowników, i nie majḟ nawet popularnych nazw.
Magistrala Pamiêci
Wszystkie komputery majḟ interfejs miêdzy pamiêciḟ a procesorem. Procesor moṡe tylko odczytywaæ i zapisywaæ w pamiêci z okre¶lonḟ prêdko¶ciḟ. Je¶li architektura systemu wymaga od procesora odczytania danych, manipulowania nimi i przepisywania ich, musimy bardzo uwaṡaæ przy prêdko¶ci magistrali pamiêci. Je¶li architektura systemu wymaga manipulacji danymi w ¶cisġym budṡecie czasowym, musimy dodaæ czas wykonania procesora do dwukrotno¶ci czasu transferu danych (jeden transfer do odczyttu i jeden transfer do zapisu). Czas transferu moṡe okazaæ siê znaczḟcym procentem ogólnego czasu. Je¶li jest to problem, moṡemy poszukaæ wiêkszej szyny pamiêci do pacy. Czasami procesor jest zbyt wolny w transferach. W takim przypadku moṡemy szukaæ sprzêtu Direct Memory Access (DMA). Obwody DMA mogḟ przesyġaæ impulsy danych szybciej niṡ wiêkszo¶æ procesorów. Czasami sprzêt DMA jest zawarty w procesorze a czasami moṡemy go dodaæ z zewnêtrznymi ukġadami. Mniejszej procesory zazwyczaj nie majḟ moṡliwo¶ci DMA. Oto dobra zasada . Je¶li analiza architektury robota pokazuje ,ṡe magistrala pamiêci jest obciḟṡona aṡ o 30 procent od danych poruszajḟcych siê po niej, rozwaṡ komputer szybszy, z szerszḟ magistralê pamiêci lub transfery DMA.
Magistrala Video
Wiele systemów komputerowych jest uṡywanych do przetwarzania ogromnych ilo¶ci danych wideo i graficznych .Systemy gier z pewno¶ciḟ sḟ takie, a konkretne komputerowe magistrale graficzne sḟ bardzo szybkie i elastyczne. Karḟ za wybór zġej magistrali graficznej moṡe byæ sġaba grafika, opóỳnione obrazy lub awaria systemu. Je¶li projekt robota bêdzie wykorzystywaġ wiele wy¶wietlaczy graficznych i manipulacji, wejdỳ na poczḟtek na stronê www.agpforum.org/ . Porozmawiajmy teraz o niektórych standardowych magistralach. Standardowe magistrale sḟ nastêpujḟce:
• Architektura ISA (Industry Standard Architecture) nie oznacza juṡ tego co widaæ. Ta magistrala wywodzi siê z oryginalnych PC, i byġa podstawḟ przemysġowḟ od wielu lat, ale jest teraz przestarzaġa. Magistrala miaġa ograniczonḟ przepustowo¶æ na poziomie 8 MBps. Nie uṡywaj jej!
• Peripheral Component Interface (PCI). Magistrala PCI przejêġa standardowḟ magistralê w przemy¶le PC. To magistrala z wyspecjalizowanym rodzajem sygnaġu, który jest ograniczony na dwa sposoby. Sygnaġy mogḟ poruszaæ siê tylko w ograniczonej odlegġo¶ci (mniej wiêcej w rozmiarze pġyty gġównej komputera). Ponadto na magistrali moṡna umie¶ciæ tylko okoġo 4 ġadunków (np. zġḟcza lub szpilki ukġadu scalonego) zanim zacznie siê ġadowaæ i ulegaæ awarii. Istniejḟ ukġady mostkowe, które mogḟ rozszerzyæ magistralê PCI na wiêcej obciḟṡeñ i gniazd. Istnieje kilka wersji magistrali zróṡnicowanych pod wzglêdem napiêcia, szeroko¶ci sġowa i czêstotliwo¶ci. Najbardziej rozpowszechniona wersja ma nastêpujḟce cechy : 5 woltów i 32 bity przy 33 MHz. Daje to przepustowo¶æ (32/8_ x 33 miliony = 132 MBps na sekundê (prêdko¶æ nieprzetworzona) . Z praktycznego punktu widzenia, nikt nigdy nie osiḟgnie warto¶ci wyṡszej niṡ 100 Mb/s z magistrali z powodu zadañ porzḟdkowych, które majḟ miejsce na magistrali. Maksymalny rozmiar technologii magistrali PCI to obecnie 64 bity przy 133 MHz dla przepustowo¶ci 1 Gb/s (prêdko¶æ nieprzetworzona). PCI staġo siê standardem branṡowym. Wielu producentów pġyt i wielu producentów ukġadów przyjêġo go. Je¶li komputer robota obsġuguje magistralê PCI, dostêpnych bêdzie wiele zewnêtrznych platform do dostosowania projektu i zaoszczêdzania czasu. Magistrala PCI byġaby doskonaġym wyborem dla robota , o ile moṡna rozwiḟzaæ problemy zwiḟzane z drganiami. Magistrala ma okoġo sto pinów na kaṡdym zġḟczu. Wystarczy jeden pin aby uniknḟæ wibracji ,aby osġabiæ system.
• Karty PCMCIA. Standard ten opisuje nie tyle magistralê, , co gniazdo interfejsu. Wiele urzḟdzeñ peryferyjnych jest dostêpnych jako kieszonkowe karty PCMCIA, wiêc jest to dobra opcja dla dodawania pamiêci i urzḟdzeñ peryferyjnych do robota. Wiêkszo¶æ przeno¶nych komputerów
,a gniazda PCMCI, aby pomie¶ci te karty. Szybko¶æ przesyġu to 20 MB/s
• Universal Serial Bus (USB). USB jest standardem szeregowym (za pomocḟ cienkiego kabla), który moṡna przesyġaæ z prêdko¶ciḟ okoġo 1,5 MB/s. Jest to dobrze znany w branṡy PC i umoṡliwia szybkie podġḟczenie urzḟdzeñ peryferyjnych do komputera , nawet przy wyġḟczonym zasilaniu. W przypadku robotów USB moṡe byæ ġatwym sposobem na podġḟczenie do innego komputera w celu komunikacji lub pobierania. Wiele komputerów przeno¶nych obsġuguje ten standard i moṡna go dostarczyæ do obora w celu jego obsġugi.
• Firewire, IEEE1394. Standard FireWire jest zwykle stosowany w systemach wymagajḟcych duṡej ilo¶ci danych multimedialnych (audio lub wideo). Kamery i inne urzḟdzania multimedialne ġḟczḟ siê ze sobḟ za pomocḟ cienkich kabli szeregowych o gorḟcych ġatkach. Dỳwiêk i obra moṡna przesyġaæ w czasie rzeczywistym, bez przerw, miêdzy urzḟdzaniami. Specyfika strumieni mediów polega na tym ,ṡe nie moṡna ich przerywaæ bez zauwaṡalnej degradacji transmisji. Je¶li na przykġad w strumieniu cyfrowego sygnaġu wideo wystḟpi przerwa, na ekranie mogḟ byæ widoczne bloki. Protokóġ FireWire zostaġ zaprojektowany w celu zagwarantowania dostarczania danych medialnych na caġym skro¶nym przewodzie. Je¶li robot musi przesyġaæ dane wideo i audio. Firewire moṡe byæ dobrym kandydatem do tych transmisj. Transmisja wideo wymaga przepustowo¶ci transmisji od okoġo 15 do 34 MB /s. FireWire moṡe obsġuṡyæ okoġo 50 MB/s (aby obsġuṡyæ wiele strumieni transmisji) i planowane sḟ szybsze wersje
• Controoler Area Network (CAN). Magistrala CAN jest standardem magistrali szeregowej przeznaczonym do uṡytku w haġa¶liwym otoczeniu, takim jak samochody i zakġady przemysġowe. Moṡe przesyġaæ dane z szybko¶ciḟ dl 125 KBps w przypadku kabli o dġugo¶ci od 40 do 1000 metrów (w zaleṡno¶ci od szybko¶ci transmisji danych). Jego innḟ gġównḟ zaletḟ jest to ,ṡe oszczêdza koszty okablowania, co jest waṡnym czynnikiem przy wykonywaniu tysiêcy samochodów. Je¶li gen robota emituje duṡo szumu elektrycznego z silników, CAN moṡe byæ dobrym wyborem dla magistrali eklektycznej wewnḟtrz robota
• Inter-IC (I2C). I2C jest standardem magistrali szeregowej uṡywanym gġównie do sygnalizacji w pojedynczej pġytce drukowanej, chociaṡ co najmniej jedna wersja protokoġu uṡywa kabla. Jego gġównḟ warto¶ci jest zapisanie liczby pinów na maġych ukġadach, które wymaga powolnych, zġoṡonych transmisji danych. Je¶li robot ma problemy z pġytḟ PCB, to ukġady I2C mogḟ zaoszczêdziæ sporo miejsca. Maksymalna przepustowo¶æ to okoġo 400 KB/s
Sieci
Ÿadna dyskusja na temat I/O nie byġaby kompletna bez dyskusji na temat LAN I/O. Prawie kaṡdy system komputerowy ma interfejs sieciowy, niezaleṡenie od tego czy jest podġḟczony czy nie. W codziennym ṡyciu biznesowym kaṡdy komputer jest podġḟczony do sieci w biurze. Sieæ ,tak jak ma to zastosowanie do komputera, wyglḟda jak pojedynczy kabel, który ġḟczy siê z komputerem. Oprogramowanie komputerowe wie jak rozmawiaæ z innymi komputerami w sieci i moṡe korzystaæ z tego przewodu. Powszechnie uṡywane ġḟcza komunikacyjne (miêdzy komputerami) uṡywane w komunikacji sieciowej sḟ nastêpujḟce:
• 10/100 BaseT. Pojedynczy kabel podġḟcza siê z tyġu komputera, aby zapewniæ ġḟczno¶æ 10/100BT. Kabel moṡe wyglḟdaæ jak kabel telefoniczny lub moṡe byæ wspóġosiowy, podobnie jak kabel telewizji kablowej. Moṡe wykorzystywaæ napiêciowe sygnaġy Ethernet i protokoġy, i prawdopodobnie jest bezpo¶rednio podġḟczony do skrzynki rozdzielczej w tylnym pomieszczeniu peġnym komputerów serwerowych. Jest to najbardziej popularny sposób ġḟczenia komputerów i byġby dobrym wyborem dla robota. Wiêkszo¶æ pġyt komputerowych zakupionych od rêki ma zġḟcza sieciowe, ale uwaga : ten typ systemu komunikacji wymaga znacznej ilo¶ci oprogramowania do jego obsġugi. Je¶li robot potrzebuje takiego ġḟcza komunikacyjnego (i zġḟcza), upewnij siê ,ṡe komputer robota bêdzie zawieraġ odpowiednie oprgramowanie do obsġugi stosu. Interfejs 10BT na nieprzetworzonḟ przepustowo¶æ 1,25 MB/s ale genralnie nie obsġuguje wiêcej niṡ 75 procent tego. 100 BT jest 10 razy szybszy. Wiele komputerów obsġuguje oba interfejsy. Interfejs 1000BT jest 10 razy szybszy , obsġugujḟc przepustowo¶æ 125 MBps. Nie zapomnij zmniejszyæ tej liczby dla celów praktycznych . Jednak przy takich prêdko¶ciach wiele komputerów nie moṡe nawet nadḟṡyæ za interfejsem 1000BT. Potrzebne sḟ szybkie, 32 bitowe systemy . Pamiêtaj ,ṡe system komputerowy robota bêdzie tak szybki jak jego najsġabsze ogniwo.
• Bezprzewodowy (RF). Jest maġo prawdopodobne ,ṡe robot bêdzie wymagaġ mobilno¶ci. Zakġadajḟc , ṡe tak jest, posiadanie przewodu sieci lokalnej (LAN) podġḟczonego do ¶ciany , jest niepraktyczne (nie jest cool). Projektanci dawno temu uwolniki wġa¶cicieli komputerów od takich wiḟzek przewodów , wprowadzajḟc kilka protokoġów bezprzewodowych. Najpopularniejszy to 802.11, który wystêpuje w róṡnych wersjach, z których najczêstszy to 802.11b. Zapewnia prêdko¶æ do 1,3 MB/s,m porównywalnḟ z przewodowym standardem 10BT. Je¶li uda nam siê ograniczyæ potrzeby komunikacyjnej robota do uġamka tej przepustowo¶ci, to 802.11b moṡe stanowiæ doskonaġy wybór dla komunikacji zewnêtrznej. Naleṡy pamiêtaæ ,ṡe ġḟcze komunikacyjne RF jest znacznie bardziej podatne na bġêdy niṡ poġḟczenie przewodowe. Silniki, komputery, ¶wiatġa, stacje radiowe, a nawet gwiazdy emitujḟ zakġócenia, które mogḟ szybko uszkodziæ dobrze zaprojektowane , standardowe poġḟczenie komunikacyjne RF .Zachowaj ostroṡno¶æ podczas korzystania z ġḟcza RF Upewnij siê ,ṡe odlegġo¶ci transmisji sḟ dobrze znane, poniewaṡ sygnaġy RF ulegajḟ szybkiemu spadkowi na odlegġo¶æ. System sterowania robotem musi przetrwaæ przerwanie lub uszkodzenie strumieni danych przesyġanych przez ġḟcze komunikacyjne
• Bezprzewodowe ¶wiatġo podczerwone (IR) jest kolejnḟ moṡliwḟ metodḟ komunikacji z miejsca na miejsce. IR istnieje w ¶wietle sġonecznym i wszêdzie w naszym codziennym ṡyciu. To moṡe nam daæ poparzenia sġoneczne i tylko czeka aby zepsuæ pierwsze automatyczny ġḟcze komunikacyjne IR jakie moṡe znaleỳæ. Bġḟdzḟce promieniowanie podczerwone jest mniej rozpowszechnione w pomieszczeniach zamkniêtych dla szybkich ġḟczy danych na krótkich dystansach. TV moṡe byæ jedynym urzḟdzeniem , które wciḟṡ uṡywa IR w wiêkszo¶ci domów
Urzḟdzenia Peryferyjne
Na zakoñczenie omawiania I/O, porozmawiajmy o urzḟdzeniach peryferyjnych. Chociaṡ korzystanie z urzḟdzeñ peryferyjnych obejmuje transmisjê danych przez magistrale komunikacyjne i ġḟcza, róṡni siê pod pewnymi wzglêdami . Urzḟdzenia peryferyjne sḟ czêsto uwaṡane za ỳródġa lub miejsca przeznaczenia danych. Sḟ to urzḟdzenia podġḟczone do komputera w celu umoṡliwienia wprowadzania
, przechowywania lub wy¶wietlania danych. Urzḟdzenia peryferyjne sḟ nieco nudne i powszechnie opisywane w tysiḟcach artykuġów. Dlaczego wiêc mówimy o tym tutaj? Przede wszystkim roboty sḟ powszechnie uwaṡane za urzḟdzenia przeno¶ne. Urzḟdzenia peryferyjne muszḟ byæ starannie dobrane
, je¶li majḟ speġniaæ wymagania dla robota. Je¶li robot porusza siê lub wibruje, naleṡy uwzglêdniæ wiele nowych wymagañ, w tym wibracje, wstrzḟsy, temperaturê, wilgotno¶æ, niezawodno¶æ mocy i promieniowanie elektryczne. Przyjrzyjmy siê wszystkim tym czynnikom póỳniej, biorḟc pod uwagê kwestie ¶rodowiskowe, ale przyjrzymy siê niektórym urzḟdzeniom peryferyjnym I/O tu.
Dyski
Dysku twarde (HD) sḟ znane wiêkszo¶ci ludzi. Sḟ w wiêkszo¶ci komputerów osobistych i okazjonalnie sḟ ỳródġem frustracji, je¶li ỳle siê zachowujḟ. Po przerwaniu mogḟ powodowaæ znaczne bóle gġowy i utratê drogich danych. Ḋrodowisko w którym dziaġajḟ jest waṡne do rozwaṡenia. Ḋrodowisko biurowe jest pod wieloma wzglêdami stabilne. Je¶li HD jest wprowadzane do robota, musi byæ traktowane prawidġowo. HD to w zasadzie wirujḟcy dysk z materiaġu magnetycznego, który moṡe zawieraæ bity na jego powierzchni. Gġowica do odczytu / zapisu przesuwa siê po powierzchni i zapewnia dostêp do tych bitów dla komputera. Projektujḟc HD w robocie, weỳ pod uwagê nastêpujḟce cechy HDL
• Wibracje. Podczas pracy HD utrzymuje gġowicê odczyt/zapis nad powierzchniḟ dysku. Odlegġo¶æ miêdzy nimi jest bardzo maġa, rzêdu milionowych czê¶ci milimetra. Wibracje powodowane przez silnik, koġa, siġowniki i inne ruchy lub robot poruszajḟcy gġowicḟ dysku zrujnujḟ dane. W najgorszych przypadkach gġowica dysku moṡe dotykaæ powierzchni dysku i zeskrobaæ powġokê magnetycznḟ caġkowicie niszczḟc HD. Dokġadnie przeczytaj specyfikacjê wibracji HD. zanim go uṡyjesz w projekcie robota. Zastanów siê nad zastḟpieniem HD droṡszḟ alternatywḟ, takḟ jak karty pamiêci flash. które nie majḟ ruchowych czê¶ci. Przy projektowaniu robota, mḟdrze jest ograniczyæ ilo¶æ danych, które bêdḟ musiaġy byæ przechowywane. Je¶li HD musi wej¶æ do robota, rozwaṡ uṡycie HD specjalnie stworzonego dla laptopów. Napêdy HD w laptopach jest bardziej wytrzymaġa.
• Szok. Je¶li robot trafi na dziurê, przewróci siê lub po prostu odbije siê, moṡe wystḟpiæ nagġy szok dla HD. Nie jest niczym niezwykġym , ṡe siġy uderzenia uderzajḟ 50 do 100 siġy grawitacji przez bardzo krótki okres czasu. Mogḟ istniej róṡne specyfikacje wstrzḟsów dla operacji i przechowywania. Próbujḟc dopasowaæ specyfikacje HD do specyfikacji robota, nie zapomnij uwzglêdniæ okresu w którym robot jest wysyġany ale nie dziaġa . Je¶li HD nie moṡe podjḟæ okre¶lonego szoku w wymaganiach robota, rozwaṡmy innḟ technologiê takḟ jak karty flash. Innḟ opcjḟ byġoby rozwaṡenie obniṡenia specyfikacji robota aby byġ on traktowany ġagodniej w dziaġaniu.
• Temperatura. Jak kaṡdy komponent robota, HD bêdzie posiadaġ ocenê temperatury .Jedynḟ dodatkowḟ rzeczḟ, którḟ naleṡy wziḟæ pod uwagê jest to ,ṡe temperatura moṡe powodowaæ czasowe kurczenie siê lub rozszerzanie HD, a przez to powodowaæ bġêdy przez pewien czas.
• Ÿyroskopowy moment obrotowy HD zawiera wirujḟce masy. Jako takie bêdḟ zachowywaæ siê jak ṡyroskop. Pamiêtasz te wirujḟce zabawki, które mogḟ balansowaæ na twoim palcu? Ÿyroskopowe dziaġanie w dowolnym HD wywiera te same siġy Kaṡdy HD bêdzie siê opieraæ odwróceniu. Je¶li robot bêdzie wirowaġ lub poruszaġ siê w taki sposób ,ze HD jest rzucany wokóġ, lepiej wykonaæ kilka najgorszych moṡliwych obliczeñ prêdko¶ci obrotowej HD. Specyfikacja HD moṡe byæ zbyt jasna co do momentu obrotowego, który moṡe wytrzymaæ napêd bez powodowania bġêdów. Je¶li to moṡliwe, zorganizuj ruchy robota majḟce wpġyw na HD , które bêdḟ wspóġpġaszczyznowe z obracajḟcḟ siê masḟ HD. Obraz HD umieszczony na pġaskiej powierzchni. Wiêkszo¶æ HD ma ksztaġt cegieġki, a powierzchnia dysku wirusje jak zapis obracajḟcy siê wokóġ pionowej osi. Dziaġajḟcy HD moṡe przesuwaæ siê w bok bez wysiġku, nie wywoġujḟc siġ ṡyroskopowych. Ale je¶li HD jest skrêcony w bok, bêdzie odporny na siġy ṡyroskopowe. Siġy te mogḟ zepsuæ dane lub wypaliæ ġoṡyska silnika w miarê upġywu czasu.
• Czas rozpêdzenia HD trwa kilka sekund, aby zakrêciæ siê do prêdko¶ci roboczych. Je¶li informacje na temat HD muszḟ byæ natychmiast dostêpne, nie pozwalaj HD na automatyczne obracanie siê przy uṡyciu. Niektóre systemy komputerowe umoṡliwiḟ obrót HD w celu oszczêdzania energii. Je¶li jest to problem, upewnij siê, ṡe komputer nie moṡe wyġḟczyæ silnika dysku.
• Dġugowieczno¶æ. HD ma skoñczone ṡycie. Powinna istnieæ informacja Mean Time Beetwen Failure (MTBF) dla HD, która uwzglêdnia pewne mechanizmy awarii. Jeṡeli wystḟpi awaria elektryczna, ġoṡysko wrzeciona ulegnie zuṡyciu lub powierzchnia magnetyczna HD ulegnie zuṡyciu. Ponadto mogḟ pojawiæ siê pewne problemy dotyczḟce degeneracji danych w dġuṡszym okresie i stajḟ siê problematyczne. Pġyty CD majḟ ten problem, HD , prawdopodobnie teṡ.
• Wskaỳnik bġêdów. HD popeġniajḟ bġêdy. Ogólnie, rejestrowane sygnaġy sḟ wiêcej niṡ wystarczajḟce aby umoṡliwiæ prawidġowy odczyt danych
• Zġa powierzchnia dyskowa. HD posiada równieṡ mechanizm zapobiegajḟce powstawaniu zġych miejsc na powierzchni dysku. Oddzielne miejsce znajduje siê na powierzchni HD, aby rejestrowaæ lokalizacjê zġych sektorów na powierzchni, aby moṡna je byġo wysyġaæ z fabryki bez posiadania idealnych no¶ników. HD moṡe wtedy caġkowicie uniknḟæ tych zġych miejsc. Jednak powierzchnia dysku moṡe równieṡ rozwijaæ nowe zġe miejsca. Je¶li system operacyjny wykryje takie zdarzenie, moṡe to zrekompensowaæ.
• Zġe zapisywanie lub odczyt. Czasami dysk siê pomyli. Bġêdy mogḟ wystḟpiæ z powodu problemów z no¶nikami, wibracji i prawdopodobnie faz ksiêṡyca! Zwykle oprogramowanie systemu operacyjnego jest zaprogramowane aby wykryæ problem i zrekompensowaæ go. Je¶li projekt robota jest taki ,ṡe dane nie mogḟ zostaæ utracone, wówczas naleṡy zapisaæ wiele obrazów dysków. Moṡliwe jest równieṡ umieszczenie w tym celu wiele dysków. Poczytaj na temat systemów nadmiarowej macierzy dyskowej (RAID) ,je¶li jest to wymagane dla zaprojektowania robota.
• No¶niki wymienne. Projekt robota moṡe wymagaæ dodania wymiennego no¶nika Dyskietki , dyski CD-ROM lub karty pamiêci mogḟ byæ uṡywane do dodawania lub usuwania danych z robota. Ten rodzaj ġḟcza komunikacyjnego dziaġa, je¶li dane nie muszḟ byæ natychmiast przekazywane .Nazywa siê Sneaker Net, poniewaṡ operator przechadza siê i przenosi dane. Jedyne uwagi o jakich musisz pamiêtaæ to:
- No¶niki wymienne mogḟ byæ mniej niezawodne niṡ no¶niki trwaġe
- No¶niki wymienne moṡna skra¶æ lub zgubiæ
- No¶niki wymienne mogḟ siê zepsuæ z powodu wstrzḟsu
- Napêdy no¶ników wymiennych pozostawiajḟ dodatkowḟ dziurê w boku robota, która moṡe przyjmowaæ zabrudzenia u zakġócenia RF
• Poġḟczenia i integralno¶æ kabli. HD majḟ wiele poġḟczeñ. W dowolnej aplikacji przeno¶nego robota poġḟczenia mogḟ byæ elementem niewiarygodnym. Je¶li HD ġḟczy siê bezpo¶rednio z PCB robota, wtedy liczba poġḟczeñ jest minimalizowana. Je¶li HD jest podġḟczony do robota za pomocḟ elastycznego kabla, liczba poġḟczeñ jest podwojona (zmniejsza niezawodno¶ci), a inny komponent zostaje wprowadzony do systemu. Elastyczny kabel naprawdê speġnia swojḟ rolê, wygina siê. Je¶li robot porusza siê trochê, wszystkie elementy bêdḟ poddane dziaġaniu siġ przyspieszenia. Wiêkszo¶æ elastycznych kabli nie jest w stanie wytrzymaæ ciḟgġego zginania. Sḟ one elastyczne tylko dlatego ,ṡe kabel moṡe siê wygiḟæ i uzyskaæ odpowiednie poġḟczenie. Specjalnie wykonane elastyczne kable mogḟ byæ zaprojektowane do wielokrotnego zginania w aplikacjach mobilnych, ale muszḟ byæ okre¶lone do takiego zastosowania, a wiêkszo¶æ z nich nie. Elastyczne kable mogḟ ostatecznie pêknḟæ.
Napêdy Ta¶mowe
Wydaje siê oczywiste ,ṡe wszystkie rozwaṡania , o których dyskutowali¶my na temat HD, dotyczḟ równieṡ napêdów ta¶mowych. Aby powtórzyæ te rozwaṡania, wymieñmy tematy z poprzedniej sekcji:
• Wibracje
• Szok
• Temperatura
• Ÿyroskopowy moment obrotowy
• Czas rozpêdzenia
• Dġugowieczno¶æ
• Wskaỳnik bġêdów
• No¶niki wymienne
• Poġḟczenia i integralno¶æ kabla
Nastêpujḟce kwestie sḟ nieco inne
• Wiêkszo¶æ napêdów ta¶mowych obsġugujḟcych no¶niki wymienne ma duṡe otwory. Otwory te mogḟ przyjmowaæ zanieczyszczenia i dopuszczaæ emisje RF zarówno do robota jak i z niego
• Sprawdỳ orientacje, w których moṡe dziaġaæ napêd ta¶m. Niektóre dyski ta¶mowe mogḟ miêc wiêcej ograniczeñ niṡ inne
Drukarki
Wiele z tych samych problemów zwiḟzanych z HD ma równieṡ znaczenie dla drukarzy. Te same problemy sḟ tutaj wymienione jako przypomnienie. Niektóre z nich zostaġy zmodyfikowane . Je¶li robot musi mieæ drukarkê na pokġadzie, rozwaṡ te same problemy
• Drukarki wibracyjne nie tylko mogḟ dziaġaæ nieprawidġowo w obecno¶ci wibracji i wstrzḟsów, ale takṡe generowaæ wibracje i wstrzḟsy oraz rozprowadzaæ je w caġym robocie Te dodatkowe ruchy muszḟ zostaæ dodane do specyfikacji ¶rodowiska , które robot musi wytrzymaæ. Mówiḟc inaczej, ruch drukarki powoduje ,ṡe ogólne wymagania dotyczḟce wibracji i wstrzḟsów sḟ bardziej rygorystyczne.
• Szok
• Temperatura. Kiedy oceniamy wydajno¶æ robota w skrajnych temperaturach, nie zapominaj o wġa¶ciwo¶ciach atramentu i papieru. Te komponenty musza równieṡ przechodziæ przeglḟd. Nie zapominaj ,ṡe papier jest gġównym ỳródġem kurzu.
• Ÿyroskopowy moment obrotowy.
• Czas rozpêdzenia. Wielu drukarkom zajmuje sporo czasu aby siê rozgrzaæ; dġuṡej niṡ dyskom.
• Dġugowieczno¶æ. Drukarki sḟ mniej niezawodne niṡ HD. Równieṡ szybciej siê zuṡywajḟ
• Wskaỳnik bġêdów
• No¶niki wymienne. Drukarki prawdopodobnie pozostawiajḟ ogromne otwory po bokach robota. Generujḟ one emisjê RF i dopuszczajḟ brud i kurz.
• Poġḟczenia i integralno¶æ kabla
Wy¶wie tlacze
Kiedy rozwaṡmy duṡe wy¶wietlacze, takie jak LCD dla projektowanego robota, musimy rozwaṡyæ wiele problemów
• Wy¶wietlacz Shock Glass pêknḟ, gdy siġy G stanḟ siê zbyt wysokie. Bardzo ġatwo jest przeġamaæ LVD. Ludzie ġamiḟ ekrany swoich przeno¶nych PC nieustannie.
• Temperatura. LCD majḟ bardzo ograniczony zakres temperatur i stanḟ siê nieczytelne poza tym zakresem temperatur. Poszukaj innych typów wy¶wietlaczy, je¶li robot musi dziaġaæ w szerokim zakresie temperatur.
• Dġugowieczno¶æ. Pod¶wietlenie wy¶wietlacza LCD moṡe z czasem ulec zuṡyciu, powodujḟ ,ṡe bêdzie przyciemniony i niejednolity. Moṡe siê to zdarzyæ , je¶li wy¶wietlacz LCD zawiera ṡarówki, które bêdḟ cierpieæ z powodu migracji metalu w czasie. Poszukaj ekranów LCD z pod¶wietleniem za pomocḟ innych technologii i sprawdỳ specyfikacje MTBF.
• Moc. Pod¶wietlenie LCD moṡe pochġaniaæ sporo energii. Co wiêcej, oprogramowanie kontrolujḟce wydatek energetyczny moṡe byæ skomplikowany do napisania
• Zakġócenia elektromagnetyczne (EMI). Kiedy rozwaṡamy pod wzglêdem integralno¶ci ekranów elektromagnetycznych, ekrany LCD sḟ po prostu ogromnymi dziurami w pakiecie robota. Sprawia to ze bardzo trudno jest utrzymaæ promieniowanie przed opuszczeniem lub wej¶ciem do robota.
Proces wyboru sprzêtu komputerowego r obota
W pewnym momencie staniemy przed zadaniem wybrania rzeczywistego komputera, który znajdziemy w ¶rodku robota. Jest to zadanie wymagajḟce do¶wiadczenia i naleṡy podej¶æ do niego systematycznie. Moṡna powiedzieæ ,ṡe prawie kaṡdy robi to w inny sposób, wiêc wymagana jest duṡa cierpliwo¶æ. Staraj siê pamiêtaæ ,ṡe zróṡnicowana pula genów do dobry pomysġ! Pierwszḟ rzeczḟ do rozwaṡenia jest uzyskanie pomocy. Podobnie jak doradcy mogḟ w znacznym stopniu pomów w fazie planowania projektu, tak samo mogḟ byæ oni cenni we wczesnej fazie projektu wysokiego poziomu. Najlepszymi doradcami sḟ do¶wiadczeni inṡynierowi którzy zrobili to juṡ wcze¶niej. Czêsto widzḟ jasne rozwiḟzania w¶ród wielu opcji dostêpnych dla projektu. Je¶li nie znajdziemy natychmiastowego rozwiḟzania dla potrzeb projektu warto wymieniæ listê kandydatów ,którzy bêdḟ brani pod uwagê. Bez wzglêdu na to
,czy ma sens budowanie lub kupowanie komputera dla robota, wynik koñcowy pozostanie taki sam. Robot bêdzie miaġ w sobie pġytê komputerowḟ (lub pġyty), a pġyty bêdḟ zawieraġy ukġad procesora. na li¶cie kandydatów warto wymieniæ ich wszystkich jako procesorów. Czasopisma opisujḟ chipy procesorowe w artykuġach aktualizowanych co najmniej raz w roku. Oto kilka stron internetowych z listḟ procesorów wbudowanych, które moṡesz rozwaṡyæ. Nie jest to lista wyczerpujḟc ani caġkiem poprawna, ale od czego¶ trzeba zaczḟæ:
www.e-insite.net/ednmag/index.asp?layout=article&stt=000&articleid=CA245647&pubdate=10/3/2002 www.cera2.com/micr/index.htm
Podczas procesu selekcji powinni¶my przestrzegaæ pewnych reguġ:
• Upewnij siê ṡe ṡadne z wymagañ projektu nie sḟ zbyt restrykcyjne. Je¶li wymagania projektu sḟ tak ¶cisġe, ṡe eliminujḟ wszystkich oprócz jednego kandydata, wtedy zmieñ projekt. Je¶li projekt lub komponenty . Je¶li projekt lub komponenty nie majḟ miejsca do poruszania siê, projekt czê¶ciej napotka problemy
• Upewnij siê, ṡe kaṡdy kandydat na procesor przekracza wiêkszo¶æ wymagañ
• Nie po¶wiêcaj duṡej ilo¶ci czasu na proces selekcji. W¶ród ostatecznych kandydatów powinien byæ dostêpny wiêcej niṡ jeden doskonaġy wybór.
• Ustal priorytety wymagañ. Ÿaden procesor nie bêdzie pasowaġ idealnie do wymagañ. Je¶li zidentyfikowane zostanḟ najwaṡniejsze wymagania, moṡe pomoc w zrozumieniu wyboru.
W przypadku kaṡdego wyszukiwania moṡna zastosowaæ kilka moṡliwych strategii. Oto kilka wskazówek, które moṡna wykorzystaæ podczas procesu: Je¶li doradcy projektu sugerujḟ okre¶lonego kandydata, rozwaṡ go w ostatecznej selekcji i zaṡḟdaj od pozostaġych kandydatów wybicia go z pierwszej pozycji, wykazujḟc wyraỳnie lepsze cechy
• Innḟ alternatywḟ jest po prostu odrzucanie kandydatów dopóki nie pozostanie ich kilku. Sam proces wyszukiwania obejmuje jedoczesne rozwiḟzywanie wielu problemów. Specyfikacja robota i algorytmów sterowania nakġadajḟ wiele ograniczeñ procesowi wyboru procesora. Kaṡde ograniczenie moṡe byæ uṡyte do wyeliminowania wielu kandydatów
• Rozwaṡ rozpoczêcie od ograniczenia najtrudniejszego do przezwyciêṡenia. Czêsto najtrudniejsze ograniczenie wyeliminuje wiêkszo¶æ kandydatów na procesory. Im szybciej moṡemy zawêziæ pole do bardzo niewielu kandydatów, tym mniej pracy zajmie selekcja.
Ograniczenia
Jakie rodzaju ograniczenie sḟ zwykle brane pod uwagê przy wyborze procesora? Poniṡej podana jest lista kontrolna rzeczy , którym trzeba siê przyjrzeæ przy wyborze komputera
Obliczenia
Bardzo trudno jest zorientowaæ siê, ile pracy musi wykonaæ procesor w czasie rzeczywistym. Procesor bêdzie wykonywaġ instrukcje z peġnḟ prêdko¶ciḟ, chyba ,ṡe zostanie poproszony o odpoczynek w ramach oszczêdzania energii. W trakcie wykonywania instrukcji moṡe wykonywaæ tylko dyskretnḟ liczbê obliczeñ na sekundê . Ilo¶æ pracy, którḟ moṡe wykonaæ procesor, jest zatem ograniczona. Sztukḟ jest móc oszacowaæ ile pracy moṡe wykonaæ kaṡdy procesor. Podczas tego proces naleṡy uwzglêdniæ nastêpujḟce kwestie
Algorytmy
Wykonaj analizê algorytmów sterowania i okre¶li ile instrukcji na sekundê musi zostaæ wykonanych aby wykonaæ okre¶lonḟ pracê. Je¶li na przykġad wiemy ,ṡe algorytm wymaga od procesora 5000 instrukcji co 20 milisekund, mamy miarê tego jak bardzo bêdzie on zajêty. Bêdzie wykonywaġ co najmniej 250 000 instrukcji na sekundê (5000 / 0.20). Je¶li procesor jest w stanie wykonaæ 1 milion instrukcji na sekundê, wówczas okoġo 25 procent tego czasu zostanie po¶wiêcony rozpatrywanemu algorytmowi. Nastêpnie moṡemy przyjrzeæ siê wszystkim innym algorytmom, które musi wykonaæ procesor i okre¶liæ ile czasu procesora zuṡyjḟ. Po prostu dodaj warto¶ci procentowe , aby uzyskaæ wskaỳnik zajêto¶ci procesora. Jako ogólnḟ zasadê nie licz na to ,ṡe moṡna zaġadowaæ procesor w dóġ o wiêcej niṡ 50 procent. Wszystkie procesory bêdḟ wykonywaæ zadania porzḟdkowe, których nie da siê ġatwo rozliczaæ. Ponadto, im czê¶ciej wykonywany jest jeden algorytm tym wiêcej kosztów bêdzie koniecznych. Upraszczajḟc nieco, moṡna stwierdziæ, ṡe do wykonania dowolnego algorytmu wystarczy ustalona ilo¶æ czasu procesora. Je¶li sprawimy, ṡe algorytm bêdzie krótszy, ale bêdziemy musieli go wykonywaæ czê¶ciej, procesor straci wydajno¶æ. Spójrzmy na skrajny przykġad. Zaġóṡmy na przykġad, ṡe procesor musi wykonaæ 100 000 instrukcji dodawania raz na sekundê. Zaġóṡmy, ṡe wymaga 10 instrukcji, aby uruchomiæ algorytm. Algorytm A wykonuje 100 000 dodawañ w tym samym czasie . Aby osiḟgnḟæ wymagane 100 000 dodawañ na sekundê przy uṡyciu algorytmu A, procesor musi wykonaæ 100,010 instrukcji na sekundê (1 x (100 000 + 10)). Algorytm B wykonuje 100 dodawaæ co milisekundê. Aby osiḟgnḟæ wymagane 100 000 dodawañ na sekundê przy uṡyciu algorytmu B, procesor musi wykonaæ 110 000 instrukcji (1000 x (100 + 10)). Algorytm A bêdzie znacznie wydajniejszy w czasie procesora, o okoġo 10 procent skuteczniejszy od algorytmu B.
Operacje Na Sekundê
Wiêkszo¶æ komputerów moṡe wykonywaæ wiele instrukcji na sekundê. Czêsto ta liczba jest podawana w milionach instrukcji na sekundê (MIPS). Podczas oceny procesora moṡe byæ trudne okre¶lenie, ile instrukcji naprawdê moṡe wykonaæ na sekundê. Moṡna to osiḟgnḟæ na kilka róṡnych sposobów
• Obliczanie prêdko¶ci. Procesory majḟ ustalonḟ prêdko¶æ zegara, którḟ moṡna okre¶liæ przez kontrolê obwodu PCB. Zwykle w metalowej puszcze znajduje siê "zegar krysztaġowy" bezpo¶rednio przylegajḟcy do procesora. Czêstotliwo¶æ zaznaczona na tym krysztale jest punktem wyj¶cia; czêsto jest to okoġo 50 MHz ( 50 000 000). Reprezentuje on zewnêtrznḟ czêstotliwo¶æ taktowania procesora. Czêsto procesor zwielokrotnia tê zewnêtrznḟ czêstotliwo¶æ zegara o wspóġczynnik, aby okre¶liæ wewnêtrznḟ czêstotliwo¶æ zegara. Gdy znamy wewnêtrznḟ czêstotliwo¶æ zegara, musimy jedynie okre¶liæ liczbê wewnêtrznych cykli zegara, które zuṡywa przeciêtna instrukcja. Wiêkszo¶æ procesorów okre¶la tê liczbê miêdzy 1 a 8 . Przy tych liczbach , obliczymy liczbê MIPS dla procesorów na tej PCB
• Benchmarki. Wiele osób interesuje siê szybko¶ciḟ i moṡliwo¶ciami róṡnych procesorów i sḟ chêtni do porównañ. Jednḟ z trudno¶ci zwiḟzanych z dokonywaniem takich porównañ jest to ,ṡe kaṡdy procesor ma swoje mocje i sġabe strony. Nawet sġaby 8 bitowy komputer z odpowiednim zestawem instrukcji moṡe przeskoczyæ 32 bitowḟ maszynê w niektórych zadaniach. Zaleṡy to od tego , na jakie projekty procesorów zostaġy zoptymalizowane. Róṡne organizacje zaproponowaġy wystadaryzowane programy (zwane benchmarkami), które moṡna wykonaæ na kaṡdym komputerze. Ogólnie rzecz biorḟc , testy porównawcze sḟ prostymi programami do sortowania, przenoszenia lub przeksztaġcania danych. Niezmiennie, wskaỳnik porównuje wydajno¶æ procesora z pewnym indeksem. który moṡe byæ porównywany z innymi procesorami. Poniewaṡ wszystkie programy testów porównawczych sḟ róṡne, nie jest niczym niezwykġym, ṡe procesory sḟ oceniane na poczḟtku testu porównawczego, ale niṡsze w przypadku innych. Je¶li chcemy okre¶liæ na podstawie danych porównawczych, w jaki sposób procesory wykonujḟ projekt naszego robota, musimy znaleỳæ punkt odniesienia, który wykona zadanie podobne do algorytmów w naszym projekcie robota. Je¶li wybierzemy benchmark, który wykonuje zadania dostateczne róṡne od naszego robota, moṡemy siê zawie¶æ. Zasadniczo dostêpne sḟ testy porównawcze do pobierania i wykonywania ,ale wdroṡenie ich moṡe zajḟæ sporo czasu
Co wiêc zrobimy z tymi liczbami? Widzieli¶my ,jak moṡemy uzyskaæ parametryczne oceny procesora. Je¶li poprawnie wykonali¶my nasze obliczenia ( w przypadku obliczania MIPS) lub je¶li wszystkie nasze zaġoṡenia sḟ poprawne (co do stosowalno¶ci danych wzorcowych), wówczas moṡemy porównaæ procesory bezpo¶rednio w kategoriach zaġamania obliczeniowego. Moṡna wybraæ procesor o najlepszej wydajno¶ci (wszystkie inne rzeczy sḟ równe)
Zdolno¶ci Arytmetyczne
Wiêkszo¶æ procesorów ma instrukcje o staġym punkcie. Niektóre procesory majḟ wbudowane instrukcje arytmetyczne zmiennoprzecinkowe. PowerPC jest w tej klasie. Je¶li robot musi przetwarzaæ ilo¶ci licz zmiennoprzecinkowych, ta zdolno¶æ bêdzie waṡna. Procesory z instrukcjami o staġym punkcie nadal mogḟ wykonywaæ instrukcje zmiennoprzecinkowe, ale wykonanie bêdzie znacznie wolniejsze niṡ procesora z wewnêtrznymi instrukcjami zmiennoprzecinkowymi
Dġugo¶æ Sġowa
Omówili¶my dġugo¶æ sġowa wcze¶niej, ale warto jḟ ponownie wymieniæ. Jest to z pewno¶ciḟ waṡna cecha procesora. Procesory o dġuṡszych dġugo¶ciach sġowa zwykle majḟ dodatkowe moṡliwo¶ci, które sprawiajḟ ,ṡe sḟ szybsze niṡ moṡna siê spodziewaæ. 32 bitowy procesor jest zwykle o wiele razy szybszy niṡ 4 do procesora 8 bitowego>
Rozmiar Pamiêci
Wiele maġych procesorów ma pamiêæ RAM i pamiêæ ROM wbudowanḟ w chip procesora. £atwo jest uzyskaæ 8 bitowe procesory z takḟ wewnêtrznḟ pamiêciḟ a nawet pewne 32 bitowy procesory. Je¶li program sterowania robotem jest bardzo maġy, a liczba robotów do zbudowania jest duṡa ,rozwaṡ ten rodzaj chipów. Dobrze jest podwoiæ wszystkie szacunki wielko¶ci pamiêci, uzyskaæ o wiele wiêcej niṡ potrzeba. Im wiêkszy rozmiar pamiêci , tym lepiej. Rozmiar i rodzaj pamiêci podrêcznej jest równieṡ waṡnḟ cechḟ procesora. Je¶li oprogramowanie robota ma wiele ciasnych pêtli wykonawczych, wtedy pamiêæ podrêczna moṡe byæ waṡnḟ funkcjḟ w wybranym procesorze.
Przepustowo¶æ
Omówili¶my juṡ przepustowo¶æ i naleṡy do listy kontrolnej. Pamiêtaj aby sprawdziæ wszystkie ograniczenia przepustowo¶ci procesora
Wykorzystanie Zasobów
W wielu aplikacjach dziaġajḟcych w czasie rzeczywistym, takich jak roboty, róṡne zasoby procesora sḟ szeroko wykorzystywane. Bardzo czêsto , gdy wykonuje siê wiele algorytmów sterowania, musza one wspóġdzieliæ zasoby wewnêtrzne procesora. Je¶li jeden z zasobów jest bardzo potrzebny, moṡe staæ siê wḟskim gardġem w systemie, który ogranicza ogólnḟ wydajno¶æ. Zdolno¶æ DMA procesora jest typowy przykġadem. Niektóre mniejsze procesory majḟ kontroler pamiêci specjalnego przeznaczenia (DMA), który moṡe przesuwaæ bloki pamiêci. Dziaġa równolegle z procesorem, gdy jest uruchamiany. Je¶li nie bêdzie w stanie wykonaæ swoje pracy caġkowicie, nastêpnym razem bêdzie naduṡywany. Je¶li inspekcja architektury wskazuje na taki problem z wyprzedzeniem, wtedy poszukaj procesora z wiêkszymi moṡliwo¶ciami
Sprzêt Specjalnego Przeznaczenia
Omówili¶my wcze¶niej kilka typów procesorów specjalnego przeznaczenia i warto wspomnieæ o nich ponownie na tej li¶cie kontrolnej .Wiele procesorów, nawet procesorów ogólnego przeznaczenia ma jednḟ lub dwie cechy szczególne, o których warto pamiêtaæ.
Zasilanie
Wzglêdy zasilania sḟ jednḟ z najwaṡniejszych funkcji robota i procesora. Póỳniej kiedy omówimy o kontroli mocy, zajmiemy siê szczegóġami. Je¶li robot jest zasilany bateryjnie, po¶wiêæ wiele uwagi sprawom energetycznym. Sukces dziaġañ zwiḟzanych z oszczêdzaniem energii bardzo czêsto zaleṡy od moṡliwo¶ci oszczêdzania energii procesora i oprogramowania dostêpnego w celu wykorzystania jego funkcji oszczêdzania energii.
Chġodzenie
Nawet je¶li robot moṡe dostarczyæ duṡo mocy procesorowi, musimy wziḟæ pod uwagê metodê chġodzenia procesora i obwodów. Niektóre procesory wymagajḟ radiatorów ,a nawet wentylatorów , które mogḟ powodowaæ problemy z niezawodno¶ciḟ i zajmowaæ miejsce.
Napiêcie
Dostêpne sḟ procesory , które dziaġajḟ przy róṡnych napiêciach. Niektóre procesory mogḟ pracowaæ na bardzo niskim napiêciu, tak niskim jak 1 wolt (choæ jest to rzadkie). Przej¶cie do operacji niskiego napiêcia moṡe zostaæ wykonane z dwóch powodów. Pierwszym z nich jest oszczêdno¶æ energii. Drugim powodem jest dopasowanie napiêcia akumulatora (je¶li w systemie jest uṡywana bateria). Znaczna czê¶æ obwodów zasilajḟcych moṡe zostaæ usuniêta z projektu, je¶li zespóġ obwodów elektrycznych moṡe bezpo¶rednio zaakceptowaæ napiêcie akumulatora.
Przestrzeñ
Czasami przestrzeñ w robocie jest na wagê zġota. Je¶li tak, weỳ pod uwagê przestrzeñ zajmowanḟ przez ukġad procesora oraz wszelkie radiatory lub wentylatory, które mogḟ byæ wymagane.
Niezawodno¶æ
Niektóre roboty sḟ wysyġane w kosmos lub w inne stosunkowo niedostêpnych miejsc. Mogḟ byæ naraṡone na ekstremalne obciḟṡenia ¶rodowiska, w tym temperaturê, próṡniê, wibracje i promieniowanie. Moṡe nie istnieæ moṡliwo¶æ nawet obsġugi robota. Je¶li niezawodno¶æ jest kluczowa, rozwaṡ ostroṡnie wybór procesorów. Na przykġad projektanci statków kosmicznych czêsto wybierajḟ starsze, sprawdzone procesory, które byġy testowane od lat.
Przeprogramowanie
Niektóre komputery majḟ wbudowanḟ pamiêæ. Upewnij siê, czy moṡna jḟ przeprogramowaæ, czy nie. Nawet je¶li moṡna jḟ przeprogramowaæ, sprawdỳ i zobacz, jakie funkcje moṡe to uġatwiæ procesorowi. W jaki sposób procesor bêdzie dostêpny, pobierany i uruchamiany ponownie
Benchmarki
Omówili¶my benchmarki i sposób okre¶lania "mocy" procesora. Sensowne jest wymienienie benchmarków na tej li¶cie kontrolnej
Cena
Moṡliwe jest uzyskanie procesora za przysġowiowḟ zġotówkê bḟdỳ tysiḟce zġotych. Robiḟc zakup, nie zapominaj ṡe, kwota nic nie znaczy je¶li dostawa nie nadchodzi. Niektóre firmy nie bêdḟ nawet rozmawiaæ z kim¶ kto potrzebuje tylko kilku procesorów
Narzêdzia Oprogramowania
Dobry procesor, który nie jest obsġugiwany jest bezuṡyteczny. Oto kilka czynników do rozwaṡenia:
• " Wsparcie. Jak dobrze jest obsġugiwaæ procesor za pomocḟ narzêdzi programistycznych? Wiele procesorów specjalnego przeznaczenia ma niestandardowe narzêdzia, które muszḟ byæ uṡywane. Wiêkszo¶æ procesorów ogólnego przeznaczenia przyciḟga wystarczajḟcḟ uwagê, dziêki czemu dostêpnych jest wiele narzêdzi programistycznych
• Drugie ỳródġo. Co siê stanie, je¶li firma od procesora upadnie? Moṡliwe jest okre¶lenie procesorów dla robota, które moṡna zakupiæ od wielu dostawców. Procesory mogḟ nie byæ identyczne we wszystkich przypadkach, ale konwersja bêdzie prosta. Nie zapominaj ,ṡe nie ma sensu zabezpieczenia dwóch dystrybutorów dla procesora, je¶li procesor jest wykonywany w jednym miejscu!
• Dostêpno¶æ inṡynierów SW. Nie zapomnij wziḟæ pod uwagê inṡynierów oprogramowania przy wyborze procesora dla robota. Je¶li inṡynier SW nie poradzi sobie z wybranym procesorem, rozwaṡ zastḟpienie procesora. Drugḟ ġatwiejszḟ opcjḟ jest zastḟpienie programisty.
• Cena oprogramowania. Nie zapomnij wziḟæ pod uwagê ceny narzêdzi programowych. Wiele jest dostêpnych w Internecie, ale inne mogḟ byæ bardzo drogie.
• Osprzêt programistyczny. Niektóre narzêdzia programowe mogḟ wymagaæ bardzo szybkiego rozwoju programowania i moṡe to nie byæ komputer. Je¶li system programistyczny wymaga systemu Unix lub innego systemu operacyjnego, komputer moṡe nie byæ wġa¶ciwym wyborem dla platformy sprzêtowej.
• Konieczne licencje. Zastanów siê ilu programistów musi korzystaæ z rozwoju narzêdzia programistycznych. Niektóre narzêdzia pochodzḟ z licencjḟ "seat" co oznacza ,ṡe projekt bêdzie wymagaġ jednej licencji dla kaṡdego inṡyniera korzystajḟcego z narzêdzi programistycznych
Czas I Nakġad Na Rozwój
Poza kwestiḟ narzêdzi programistycznych wiele innych problemów moṡe mieæ wpġyw na czas i koszt rozwoju robota:
• COTS. Akronim dla Commercial of the Shelf. Zasadniczo moṡemy kupiæ pġyty komputerowe z procesorami juṡ zainstalowanymi.
• Oprogramowanie od osób/firm trzecich. Czy kto¶ napisaġ specjalistyczne oprogramowanie dla tego procesora, które mogḟ byæ przydatne w projekcie robota?
• Ryzyko techniczne. Czy wszystkie funkcje procesora pomagajḟ rozbroiæ techniczne ryzyko projektu?
Wybór procesora i sprzêtu komputerowego dla robota jest znacznie bardziej skomplikowany niṡ moṡe siê to wydawaæ na pierwszy rzut oka. Ale z naleṡytḟ uwagḟ zwróconḟ na wszystkie pytania opisane powyṡej , proces powinien przebiegaæ sprawnie
•