Komunikacja
Model siedmiowarstwowy OSI
Kilka lat temu grupa ludzi zebraġa siê, próbujḟc zdefiniowaæ model sposobu, w jaki powinna byæ zorganizowana komunikacja, znana pod nazwḟ systemów otwartych Siedmiowarstwowego modelu poġḟczenia miêdzysieciowego (OSI). Nikt tak naprawdê nie podḟṡaġ za modelem od góry do doġu, ale komunikacja sieciowa TCP / IP (Transmission Control Protocol / Internet Protocol) jest najbliṡsza; Model ten jest jednak przydatny jako lista kontrolna dla typów rzeczy, które mogḟ byæ poṡḟdane w systemie komunikacji. Biorḟc pod uwagê, ṡe warto teṡ uczyæ siê tylko komunikacji sieciowej, zagġêbimy siê w niḟ.
WARSTWA 1: WARSTWA FIZYCZNA
Warstwa danych jest najniṡszḟ warstwḟ i okre¶la fizyczne i elektryczne wġa¶ciwo¶ci. Jest to warstwa zajmujḟca siê wysyġaniem bitów przez fizyczne medium. Caġa komunikacja ma jakḟ¶ fizycznḟ warstwê. W niektórych systemach moṡe byæ jedynḟ warstwḟ. Komunikacja w pa¶mie podstawowym, modulacja, demodulacja i transmisja za po¶rednictwem kanaġów to wszystkie tematy, które luỳno naleṡḟ do tej warstwy.
WARSTWA 2: WARSTWA LINKÓW DANYCH
Ta warstwa zajmuje siê blokami danych na no¶nikach fizycznych. Kontroluje wspóġdzielenie ¶cieṡki komunikacyjnej, ramek, kontrolê przepġywu i niektóre niskopoziomowe sprawdzanie bġêdów. Jest to warstwa wielokrotnego dostêpu (MAC) w komunikacji sieciowej. Istnieje wiele strategii udostêpniania dostêpu do kanaġu transmisji. Techniki dostêpu i sprawdzania bġêdów to tematy, które moṡemy omówiæ i które naleṡḟ do tej warstwy.
WARSTWA 3: WARSTWA W SIECI
Ta warstwa jest odpowiedzialna za routing, tworzenie, utrzymywanie i zrywanie poġḟczeñ. To jest warstwa IP w komunikacji sieciowej.
WARSTWA 4: WARSTWA TRANSPORTOWA
Ta warstwa jest odpowiedzialna za bezbġêdnḟ transmisjê danych z jednego komputera do innego. To jest warstwa TCP w komunikacji sieciowej.
WARSTWA 5: WARSTWA SESJI
Ta warstwa obsġuguje czas trwania bieṡḟcego poġḟczenia i utrzymuje ruch danych.
WARSTWA 6: WARSTWY PREZENTACJI
Ta warstwa obsġuguje dane z aplikacji. Wykonuje pakowanie, szyfrowanie, odszyfrowywanie, kompresjê i tak dalej.
WARSTWA 7: WARSTWA APLIKACJI
W tej warstwie znajduje siê oprogramowanie aplikacji
Nie wszyscy sḟ zadowoleni z siedmiowarstwowego modelu OSI. Kilka ukrytych pomysġów kryje siê za warstwami stosu, który dotyczy wiêkszo¶ci komunikacji:
• Ukryte funkcje Warstwy stosu wspóġdziaġajḟ ze staġym interfejsem. Fragmenty stosu moṡna wewnêtrznie przeprojektowaæ i nadal dziaġajḟ poprawnie.Typowe interfejsy Poniewaṡ warstwy stosów wspóġdziaġajḟ ze staġym interfejsem, dwie róṡne maszyny mogḟ komunikowaæ siê ze sobḟ bez problemu. Po prostu komunikujḟ siê z tego samego poziomu na tym samym poziomie. Na przykġad informacja TCP na poziomie 4 w jednym urzḟdzeniu przechodzi przez stos do poziomu fizycznego i jest przesyġana do drugiego komputera. Na komputerze odbierajḟcym wchodzi na poziom fizyczny i podróṡuje na poziom 4, gdzie pojawia siê ponownie jako informacja TCP. Wiele technik komunikacji prowadzi do standardów, które mogḟ byæ obserwowane przez wszystkich projektanci na róṡnych poziomach stosu. Wiêkszo¶æ standardów komunikacji jest ograniczona do zaledwie kilka poziomów zġoṡono¶ci. Wszystkie majḟ warstwy fizyczne i ġḟcza. Wielu ma sieæ i poziomy transportu, ale nie wiele idzie na wyṡsze poziomy.
Warstwa fizyczna
Wszystko to powiedziawszy, komunikacja cyfrowa sprowadza siê do jednego: przesyġania danych przez kanaġ. Kolejne podstawowe twierdzenie pochodziġo z pracy Shannona. Sprowadza siê do równania, które jest podstawowym, ograniczajḟcym przypadkiem transmisji danych przez kanaġ:
C = B x log2(1 + S/N)
C to pojemno¶æ kanaġu w bitach na sekundê, B to szeroko¶æ pasma kanaġu w cyklach na sekundê, a S / N to stosunek sygnaġu do szumu w kanale. Intuicyjnie oznacza to, ṡe je¶li stosunek S / N wynosi 1 (sygnaġ jest tego samego rozmiaru co szum), moṡemy umie¶ciæ prawie 1 bit na falê sinusoidalnḟ przez kanaġ. Chodzi o sygnalizacjê pasma podstawowego, o czym wkrótce porozmawiamy. Je¶li kanaġ ma wystarczajḟco niski poziom szumów i obsġuguje wspóġczynnik S / N równy okoġo 3, wówczas moṡemy przesġaæ prawie 2 bity na sinusoidê przez kanaġ. Prawda jest taka, ṡe zdolno¶æ Shannona do zdolno¶ci produkcyjnych byġa trudna dla inṡynierów. Do niedawna marnowano znacznḟ czê¶æ dostêpnej przepustowo¶ci w kanaġach komunikacyjnych. Dopiero w ciḟgu ostatnich kilku lat inṡynierowie opracowali metody pakowania danych na fale sinusoidalne wystarczajḟco ciasne, aby zbliṡyæ siê do limitu Shannona. Twierdzenie o zdolno¶ci Shannona rysuje siê na krzywej
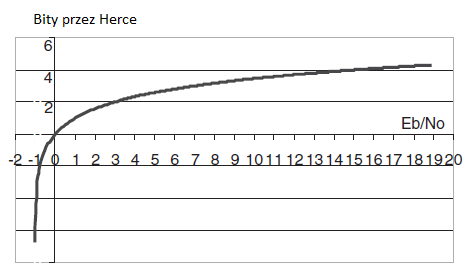
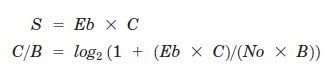
Istnieje limit S / N, poniṡej którego nie moṡe byæ transmisji bezbġêdnych. C jest ojemno¶æ kanaġu w bitach na sekundê, B jest przepustowo¶ciḟ kanaġu w cyklach na sekundê, S jest ¶redniḟ mocḟ sygnaġu, N jest ¶redniḟ mocḟ szumu, Nie jest gêsto¶ciḟ mocy szumu w kanale, a Eb jest energiḟ na bit. Oto jak ustalamy limit S / N:
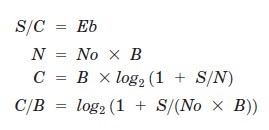
Poniewaṡ
Podnosimy do potêgi 2
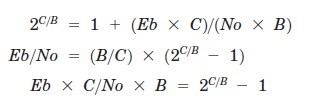
Je¶li dokonamy zamiany zmiennej x = Eb x C /No x B, moṡemy uṡyæ toṡsamo¶ci matematycznej. Limit (jako x idzie do 0) z (x + 1)1/x = e. Chcemy dolnego limitu pojemno¶ci, gdy S / N spadnie. W tym limicie x idzie na zero, jak to siê dzieje. Musimy przetransformowaæ ostatnie równanie i przyjḟæ limit, poniewaṡ x idzie do zera.

W dB ta liczba to -1.59 dB. Zasadniczo, je¶li sygnaġ jest poniṡej szumu przez maġy margines. Ustawia to teoretycznḟ granicê, której ṡaden system modulacji nie moṡe przekroczyæ. Odkrycie to staġo siê celem projektantów systemu. Limit pojawi siê poniṡej w krzywych bġêdów róṡnych schematów modulacji. Istnieje wiele sposobów blokowania elektronów przez przewody lub fale przez drogi powietrzne. We wszystkich tych przypadkach kanaġ ma przepustowo¶æ. Czasami przepustowo¶æ jest ograniczona przez fizykê; czasami Federalna Komisja £ḟczno¶ci (FCC) ogranicza to. W obu przypadkach stosuje siê twierdzenie zdolno¶ci Shannona: stawianie Boga i FCC na równych stopach matematycznych. Kaṡda metoda przesyġania danych przez kanaġ ma podstawy matematyczne. Czêsto, sama metoda prowadzi do zamkniêtej formy matematycznej dla moṡliwo¶ci metody. Po zaimplementowaniu metody implementacja moṡe zostaæ przetestowana przy uṡyciu Twierdzenia Pojemno¶ci Shannona. Skalibrowany poziom szumu moṡna dodaæ do idealnego kanaġu, a zdolno¶æ przenoszenia danych moṡna zmierzyæ.
Transmisja pasma podstawowego
Biorḟc pod uwagê przewód, caġkowicie moṡna wyġḟczyæ i wġḟczyæ napiêcie, aby utworzyæ impulsy na drucie. W najprostszej formie jest to transmisja pasma podstawowego, metoda komunikacji odrêbna od modulowanej transmisji, którḟ omówimy póỳniej. Transmisja pasma podstawowego jest uṡywana z wieloma róṡnymi rodzajami no¶ników. Przesyġanie danych za pomocḟ kabla nastḟpiġo na dġugo przedtem, zanim armia Napoleona uṡyġa faksu. Tak, pierwsze faksy rzucono do biur mniej wiêcej w tym czasie w historii. Transmisja pasma jest równieṡ uṡywana w napêdach ta¶mowych i dyskach. Dane sḟ zapisywane jako impulsy na ta¶mie i odczytywane póỳniej. Sekwencja impulsów moṡe byæ zbudowana na wiele róṡnych sposobów. Inṡynierowie w naturalny sposób wymy¶lili dziesiḟtki róṡnych sposobów interpretowania tych impulsów. Jak to czêsto bywa, inne cele istniejḟ poza wysyġaniem jak najwiêkszej liczby bitów na sekundê w kanale. Jednak w realizacji innych celów przepustowo¶æ kanaġu jest po¶wiêcana. Oto lista innych celów, które inṡynierowie czêsto muszḟ rozwiḟzaæ, projektujḟc sposób, w jaki impulsy sḟ umieszczane w kanale:
• Balans prḟdu staġego (DC) Czasami kanaġ nie moṡe w ogóle przekazywaæ napiêcia staġego. Ciḟgġy ciḟg wszystkich moṡe po prostu wyglḟdaæ jak ciḟgle wysokie napiêcie. Weỳ, na przykġad, napêd ta¶mowy. Podstawowe równanie napiêcia i indukcyjno¶ci cewki gġowicy ta¶my
V = L x cI / dt
V to sygnaġ wej¶ciowy, L to indukcyjno¶æ cewki gġowicy, a I to prḟd przez cewkê. Je¶li V byġby staġy, potrzebowaliby¶my stale rosnḟcego prḟdu przez cewkê, aby równania dziaġaġy. Poniewaṡ jest to niemoṡliwe, projektanci ta¶m potrzebujḟ alternatywnego schematu. Wymy¶lili kodowanie impulsów w taki sposób, ṡe taka sama liczba zer i jedynek jest podawana w cewce gġowicy. W ten sposób utrzymuje siê równowagê DC. Tylko poġowê bitów moṡna zapisaæ tak jak wcze¶niej, ale wszystko dobrze siê ukġada. Kody, których uṡywajḟ sḟ wersjḟ nonreturn do zera (NRZ).
• Kodowanie tanich dekoderów Niektóre dane sḟ kodowane w taki sposób, ṡe dekoder moṡe byæ bardzo tani. Rozwaṡmy na chwilê zakodowane sygnaġem szeroko¶ci impulsu sygnaġy analogowe. Impuls wysyġany jest w kaṡdym okresie zegara, a cykl roboczy impulsu jest proporcjonalny do okre¶lonego napiêcia analogowego. Im wyṡsze napiêcie, tym wiêksze cykl pracy i wiêkszy odsetek czasu, jaki puls spêdza przy wysokim napiêciu. W odbiorniku napiêcie analogowe moṡna odzyskaæ za pomocḟ filtra dolnoprzepustowego skġadajḟcego siê z rezystora i kondensatora. Odfiltrowuje warto¶ci prḟdu przemiennego w ksztaġcie fali i utrzymuje prḟd staġy. Tego typu tanie kody odbiorników najlepiej stosowaæ w sytuacjach, w których musi byæ wiele niedrogich odbiorników.
• Samo-zegary Niektóre sytuacje transmisji wymagajḟ odzyskania zegara po stronie odbiorczej. W takim przypadku wybierz schemat kodowania impulsów, który ma wbudowany zegar w ksztaġt fali.
• Gêsto¶æ danych Niektóre schematy kodowania impulsów dostarczajḟ wiêcej bitów do transmisji kanaġem niṡ inne.
• Trwaġo¶æ Niektóre schematy kodowania impulsów majḟ wbudowane mechanizmy umoṡliwiajḟce unikanie i / lub wykrywanie bġêdów.
ZNIEKSZTA£CENIE IMPULSOWE: DOPASOWANIE FILTRÓW
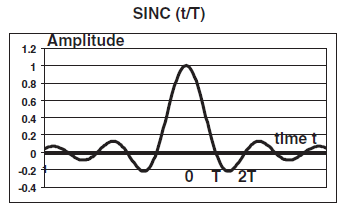
Jeden z trudnych problemów z transmisjḟ impulsów przez kanaġ (przewód, ¶wiatġowód lub wolna przestrzeñ) jest to, ṡe impulsy ulegajḟ znieksztaġceniu. W rzeczywisto¶ci dzieje siê tak, ṡe impulsy rozprzestrzeniajḟ siê w czasie. Je¶li ogólny kanaġ transmisji ma ostre warto¶ci graniczne, jak to jest wġa¶ciwe dla gêsto upakowanego kanaġu, to impulsy wychodzḟ z odbiornika wyglḟdajḟc jak funkcja sinc, którḟ oglḟdali¶my wcze¶niej. Impuls rozprzestrzeniġ siê w czasie
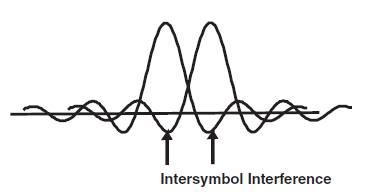
Je¶li staramy siê spakowaæ tak mocno te impulsy w czasie, bêdḟ one miaġy tendencjê do wzajemnego zakġócania siê. Jest to powszechnie nazywane Intersymbol Interference (ISI), które omówimy póỳniej
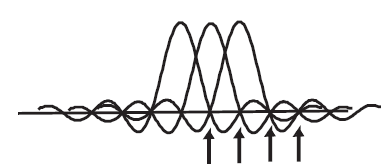
Ale tu jest niespodzianka. Kanaġ transmisyjny nie moṡe byæ doskonaġy, z gwaġtownym przesuniêciem czêstotliwo¶ci. W praktyce, musimy pozwoliæ na dodatkowḟ przepustowo¶æ i rozluỳniæ nasze wymagania dotyczḟce kanaġu transmisji i sprzêtu transmisyjnego. Powszechnym rozwiḟzaniem tego problemu jest podniesiony filtr kosinusowy (RCF), filtr, który wcze¶niej widzieli¶my w czê¶ci 8 jako okno Hanning. Powszechnḟ praktykḟ jest wġḟczenie tego pasujḟcego RCF do nadajnika, aby wstêpnie skompensowaæ impulsy dla efektu kanaġu. Otrzymane sygnaġy impulsowe, nawet je¶li majḟ oscylacje w ich krawêdzi wiodḟcej i spġywowej, przechodzḟ przez zero tylko wtedy, gdy pobierane sḟ próbki. W ten sposób sḟsiednie impulsy nie zakġócajḟ siê wzajemnie
WSPÓLNE STANDARDY KOMUNIKACJI PASMA PODSTAWOWEGO
Poniṡej przedstawiamy niektóre stosunkowo popularne przewodowe poġḟczenia komunikacyjne dla pasma podstawowego, z których wszyscy korzystali¶my. Sḟ to ġḟcza komunikacyjne, które majḟ stosunkowo niewiele przewodów i sḟ ogólnie uwaṡane za ġḟcza szeregowe. Wiele komputerów jest juṡ podġḟczonych do tego rodzaju portów komunikacyjnych i dostêpnych jest wiele ukġadów interfejsu, które je obsġugujḟ.
• RS232 / 423 RS232 / 423 istnieje od 1962 roku i jest w stanie przesyġaæ dane z prêdko¶ciḟ do 100 Kb/ s (RS423) przez interfejs trójprzewodowy. Jest uwaṡany za lokalny interfejs do komunikacji punkt- punkt. Powinien byæ prosty w uṡyciu, ale moṡe powodowaæ znacznḟ utratê przytomno¶ci, poniewaṡ istnieje wiele opcjonalnych przewodów i róṡnych pinów dla róṡnych typów zġḟczy. Inne niṡ fizyczne warstwa i definicja kolejno¶ci bitów, bardzo maġe nakġadanie warstw odbywa siê nad warstwḟ fizycznḟ za pomocḟ RS232.
• RS422 RS422 wykorzystuje sygnaġy róṡnicowe, zbalansowane, które sḟ bardziej odporne na zakġócenia niṡ jednostronne okablowanie RS232. Szybko¶æ transmisji danych wynosi do 10 Mb / s przy ponad 4000 stopach okablowania. Poza warstwḟ fizycznḟ i definicjḟ kolejno¶ci bitów, bardzo maġe nakġadanie warstw odbywa siê za pomocḟ RS422
• Sieci Ethernet 10BT / 100BT / 1000BT Ethernet to jedna z najpopularniejszych technologii sieci lokalnych (LAN). Technologia 10BT LAN umoṡliwia wiêkszo¶ci biur biznesowych ġḟczenie wszystkich komputerów z sieciḟ. Komputery mogḟ przesyġaæ dane miêdzy sobḟ z prêdko¶ciḟ zbliṡonḟ do 9 do 10 milionów bitów na sekundê. W praktyce, w obciḟṡonych sieciach, najlepsze stawki, które uṡytkownik moṡe osiḟgnḟæ, sḟ znacznie niṡsze. Stos oprogramowania zawiera do czterech warstw z warstwy fizycznej 1 (karty sieciowe [NIC]), do IP oraz do TCP w warstwie 4. 100BT jest 10 razy szybszy niṡ 10BT. 1000BT jest 10 razy szybszy i dostêpny do uṡycia z fizycznḟ warstwḟ ¶wiatġowodowḟ oraz okablowaniem miedzianym.
Komunikacja Modulowana
Czasami komunikacja cyfrowa nie moṡe byæ wysġana przez kanaġ bez modulacji; komunikacja w pa¶mie podstawowym nie bêdzie dziaġaæ. Moṡe tak byæ z kilku powodów:
• Czasami okablowanie nie jest moṡliwe z powodu odlegġo¶ci. Niemodulowane sygnaġy danych majḟ zazwyczaj stosunkowo niskḟ czêstotliwo¶æ. Przesyġanie wolniejszego sygnaġu pasma podstawowego za po¶rednictwem anteny wymaga anteny w przybliṡeniu wielko¶ci fali samego sygnaġu. Dla sygnaġu RS232 przy 100 Kb/s sygnaġ ma przebieg z okoġo 10 mikrosekund na bit. Ḋwiatġo przemierza 3000 metrów, okoġo 2 mil, w 10 mikrosekund. Potrzebowaliby¶my anteny o dġugo¶ci dwóch mil, aby skutecznie przekazaæ taki sygnaġ do impedancji przestrzeni. Oczywi¶cie, to nie zadziaġa dobrze. Jest to jeden z gġównych powodów, dla których prawie nie istniejḟ systemy komunikacji bezprzewodowej z pasmem podstawowym.Czasami kanaġ jest tak gġo¶ny, ṡe do kodowania muszḟ byæ uṡyte specjalne techniki kodujḟce sygnaġ przed transmisjḟ.
• FCC i inne organizacje regulujḟ wykorzystanie widm transmisyjnych. £ḟcza komunikacyjne muszḟ byæ umieszczone miêdzy innymi ġḟczami komunikacyjnymi w prawnych pasmach komunikacyjnych. W celu oddzielenia tych konkurujḟcych ġḟczy komunikacyjnych stosuje siê precyzyjnḟ modulacjê.
Modulacja zazwyczaj wymaga uṡycia sygnaġu no¶nego. Sygnaġ informacyjny (I) jest mieszany (przemnoṡony przez) sygnaġ no¶nej (C), a zmodulowany sygnaġ (M) jest nadawane przez kanaġ komunikacyjny:
M = I x C
Chociaṡ jako no¶nik C moṡna uṡyæ wielu róṡnych sygnaġów, najczê¶ciej wykorzystywanym sygnaġem jest fala sinusoidalna. Chociaṡ operacja x moṡe dotyczyæ dowolnego rodzaju operacji, najpowszechniejszy typ mieszania wymaga mnoṡenia. Fala sinusoidalna ma tylko kilka parametrów w swoim równaniu. Zatem modulowanie fali sinusoidalnej moṡe obejmowaæ tylko kilka róṡnych operacji:
C = A sin (ω x t + θ)
gdzie A jest amplitudḟ, ω jest czêstotliwo¶ciḟ, a θ jest fazḟ. Kaṡda modulacja tej fali no¶nej przez dane musi obejmowaæ modyfikacjê jednego lub wiêcej z tych trzech parametrów. Jeden lub wiêcej parametrów (A, ω lub θ) moṡe przyjmowaæ jednḟ lub wiêcej warto¶ci na podstawie danych. Podczas wprowadzania danych, I, przyjmuje jednḟ z n róṡnych warto¶ci, zmodulowana fala no¶na przyjmuje jeden z n róṡnych ksztaġtów reprezentujḟcych dane I. Nastêpne 3 dyskusje opisujḟ modulowanie A, ω i θ w tej kolejno¶ci.
• Kluczowanie z przesuniêciem amplitudy (ASK)
M(n) = An x sin (ω x t + θ)
gdzie A jest jednḟ z n róṡnych amplitud, ω jest staġḟ czêstotliwo¶ciḟ, a θ jest staġḟ fazḟ. W najprostszej formie, n = 2, a ksztaġt fali M wyglḟda jak sinusoidalna fala, która zanika do zera za kaṡdym razem, gdy dane sḟ zerowe (A = 0 lub 1).
• Kluczowanie z przesuniêciem czêstotliwo¶ci (FSK)
M(n) = A x sin(ωn x t + θ)
gdzie A jest ustalonḟ amplitudḟ, ωn jest jednḟ z n róṡnych czêstotliwo¶ci, a θ jest faza staġa. W najprostszej formie, n = 2, a przebieg M wyglḟda jak sinus fala, która spowalnia czêstotliwo¶æ, gdy dane sḟ zerowe (ω = freq0 lub freq1).
• Kluczowanie z przesuniêciem fazowym (PSK)
M(n) = A x sin(ω x t + θn)
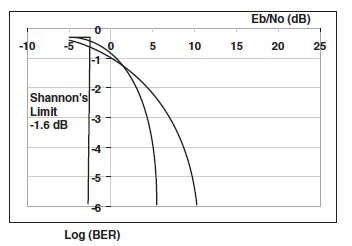
gdzie A jest ustalonḟ amplitudḟ, ω jest staġḟ czêstotliwo¶ciḟ, a θn jest jednḟ z n róṡnych fazy. W najprostszej formie n równa siê 2, a ksztaġt fali M wyglḟda jak fala sinusoidalna, która odwraca siê pionowo, gdy dane sḟ zerowe (? = 0 lub 180 stopni). Kaṡda metoda modulacji ma odpowiedniḟ metodê demodulacji. Kaṡda modulacja metoda ma równieṡ strukturê matematycznḟ, która pokazuje prawdopodobieñstwo popeġnienia bġêdów przy okre¶lonym stosunku S / N. Nie zajmiemy siê tutaj matematykḟ, poniewaṡ obejmuje ona zarówno funkcje rachunku róṡniczkowego, jak i prawdopodobieñstwa, z rozkġadami Gaussa To, co wynika z obliczeñ, nazywa siê Eb / No curves (wymawiane "ebb no"). Wyglḟdajḟ one jak na poniṡszej ilustracji, która pokazuje bitowḟ stopê bġêdu (BER) w stosunku do krzywej Eb / No dla okre¶lonego schematu modulacji
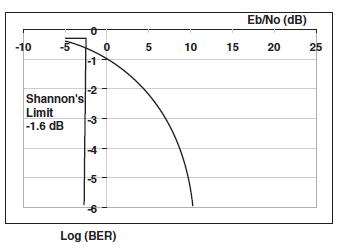
Pamiêtaj, ṡe Eb / No to stosunek energii w jednym kawaġku do gêsto¶ci energii haġasu. Kilka uwag na temat tego wykresu:
• Im lepszy stosunek S / N (im wyṡszy Eb / Nie), tym niṡszy poziom bġêdu (BER). Jest oczywiste, ṡe lepszy sygnaġ bêdzie dziaġaġ bardziej efektywnie w kanale.
• Limit Shannon jest pokazany jako pudeġko. Górna czê¶æ skrzynki jest tworzona przy BER równym 0,50. Nawet maġpa moṡe dostaæ poġowê danych za poġowê czasu! Pionowa krawêdỳ skrzynki ma warto¶æ Eb / No 0,69, dolnḟ granicê transmisji cyfrowej, którḟ wyprowadzili¶my wcze¶niej. Nie ma mowy o sensownej transmisji z Eb / Nie tak nisko; pojemno¶æ kanaġu spada do zera.
• Ten wykres pokazuje BER, którego moṡemy siê spodziewaæ w obliczu róṡnych warto¶ci Eb / No w kanale. Dostosowania moṡna dokonaæ. Je¶li kanaġ ma ustalonḟ warto¶æ Bez warto¶ci, której nie moṡna zmieniæ, inṡynier moṡe jedynie próbowaæ zwiêkszyæ Eb, byæ moṡe zwiêkszajḟc siġê sygnaġu pompowanḟ do kanaġu.
• I odwrotnie, je¶li inṡynier potrzebuje okre¶lonego BER (lub niṡszego), aby system dziaġaġ, to okre¶la minimalny Eb / No, który kanaġ musi mieæ. W praktyce nie moṡna zrealizowaæ idealnej realizacji teoretycznej krzywej Eb / No, a inṡynier powinien ustawiæ kanaġ na Eb / No wyṡej niṡ teoretycznie jest to wymagane.
Rysunek
pokazuje dwie krzywe BER z dwóch róṡnych, ale podobnych modulacji schematy. Krzywe te pokazujḟ, ṡe niektóre schematy modulacji sḟ bardziej wydajne niṡ inne. W rzeczywisto¶ci caġa gra budowania schematów modulacji jest próbḟ zbliṡenia siê do limitu Shannon. Jak moṡna siê byġo spodziewaæ, bardziej wydajne modulatory sḟ droṡsze. Wiêkszo¶æ ludzi decyduje siê na marnowanie przepustowo¶ci, zamiast pġaciæ za droṡszy modulator
SKOMPLIKOWANE MODU£Y
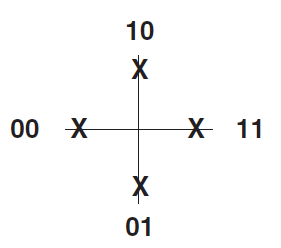
Te poprzednie przykġady sḟ bardzo szczḟtkowymi schematami modulacji. Czêsto we wspóġczesnych metodach modulacji modulowany jest wiêcej niṡ jeden parametr no¶ny w tym samym czasie. Wprowadzimy tu takṡe pojêcie symbolu. Symbol jest po prostu wielokrotnḟ liczbḟ bitowḟ uṡywanḟ do modulacji. Bajt moṡe byæ 8-bitowym symbolem uṡywanym w ASK do ustawienia amplitudy na jeden z 256 róṡnych poziomów. Proces modulacji no¶nika za pomocḟ symbolu zmienia charakter przebiegów no¶nych. Odbiornik demoduluje dane i podejmuje próbê okre¶lenia charakteru przebiegu w celu sklasyfikowania, który symbol reprezentuje. Demodulator w odbiorniku sġuṡy do kwantyfikacji odebranego przebiegu w przestrzeni symbolu. Wizualizuj przestrzeñ symbolu jako wielowymiarowḟ przestrzeñ danych, w której porusza siê odbierany sygnaġ. Gdy zmienia siê amplituda, czêstotliwo¶æ i faza odbieranego sygnaġu, sygnaġ przemieszcza siê w przestrzeni symbolu odbiornika. Jeṡeli na przykġad zdefiniowano 256 róṡnych symboli, to w przestrzeni symboli, w której znajdujḟ siê te symbole, znajduje siê 256 róṡnych punktów. Jeṡeli odebrany sygnaġ przekracza jeden z tych 256 punktów, gdy zegar danych siê tyka, odebrany symbol powiḟzany z tym punktem jest wybrany jako odebrany symbol, a dane (8 bitów) reprezentowane przez ten symbol sḟ zrzucane na wyj¶cie odbiornika. Spójrzmy na uproszczony przykġad. Zaġóṡmy, ṡe modulujemy amplitudê i fazê z jednym bitem. Bêdḟ uṡywane cztery róṡne symbole (00, 01, 10 i 11), a przestrzeñ symboli moṡe wyglḟdaæ jak tu
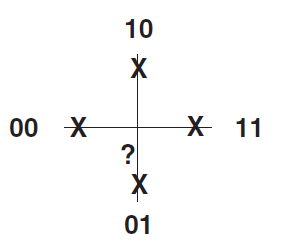
Kiedy zegar danych tyka, próbkujemy pozycji odbieranego sygnaġu w symbolu przestrzeñ. Zaġóṡmy, ṡe otrzymujemy symbol, którego amplituda jest trochê niska, ale ma bardzo wyraỳnḟ fazê. Moṡe on zostaæ odwzorowany w nastêpujḟcy punkt pokazany tu
Aby wybraæ, który symbol zostanie odebrany, umieszczamy siatkê decyzyjnḟ w przestrzeni symboli, jak pokazano tu
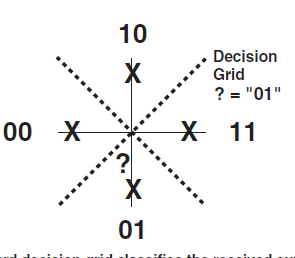
Siatka decyzyjna szybko podejmuje decyzjê, a symbol zostaje uznany za 01. Oczywiste jest, ṡe nie chcemy, aby symbole znajdowaġy siê zbyt blisko siebie w przestrzeni symboli. Schematy modulacji majḟ na celu zminimalizowanie prawdopodobieñstwa, ṡe symbole bêdḟ zbyt blisko lub ṡe osobliwo¶ci kanaġu
spowodujḟ, ṡe jeden symbol zostanie pomylony z innym. Bardziej zġoṡonym przykġadem tego rodzaju przestrzeni symboli jest 64 kwadraturowa modulacja amplitudy (QAM), w której 8 bitów danych jest modulowanych w tym samym czasie. Przestrzeñ symboli dla 64 QAM moṡe mieæ kwadratowḟ strukturê, jak pokazano
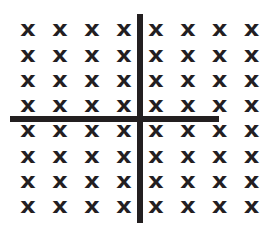
Przychodzḟce dane symbolu ¶ledzḟ dziki wzór przez siatkê kropek 8 x 8. A w pewnym stopniu, poniewaṡ dane symbolu próbujḟ trzymaæ siê punktów siatki, siatka ma otwarte obszary, w których dane nie przemierzajḟ. Te otwarte obszary wyglḟdajḟ jak oczy i sḟ przedmiotem kolejnej dyskusji.
Kontrola bġêdów
Projektanci duṡych przestrzeni symbolicznych muszḟ martwiæ siê o to, co nazywa siê "otwartym okiem". Naleṡy pamiêtaæ, ṡe gdy zegar danych odhacza siê w odbiorniku, odebrany sygnaġ powinien znajdowaæ siê tuṡ nad punktem symbolu. Aby dostaæ siê tam z dowolnego innego punktu symbolu, powinien on podróṡowaæ dobrze znanḟ trasḟ przez przestrzeñ symbolu (regulowanḟ przez ksztaġt sygnaġu no¶nej). W przypadku bezszumowego kanaġu, ¶lad odebranego sygnaġu prze¶ledziġby bardzo ġadny zestaw ¶cieṡek geometrycznych, a wiele pustej przestrzeni pokazywaġoby siê w przestrzeni symbolu, miejscach, w których sygnaġ nigdy nie przemyka. Te puste przestrzenie sḟ tym, czego szukajḟ inṡynierowie, gdy próbujḟ znaleỳæ otwarte oko. Przestrzenie te nazywa siê tak, poniewaṡ generalnie sḟ tworzone przez dwie fale sinusoidalne i majḟ ksztaġt pokazany
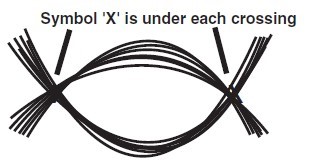
Dobry inṡynier moṡe umie¶ciæ przebieg komunikacji na oscyloskopie (lub innym instrumencie), spojrzeæ na wzór oka i okre¶liæ stan zdrowia fizycznej warstwy sieci komunikacyjnej. W ten sam sposób inṡynierowie mogḟ rysowaæ ostatnie punkty danych, aby zobaczyæ, jak mocno skupiajḟ siê wokóġ punktów symboli. Zdrowe ġḟcze komunikacyjne bêdzie miaġo bardzo ¶cisġe skupienie wokóġ punktów symboli, a chorobliwy system bêdzie je rozrzucaġ w niedbaġy sposób. Sḟ to wszystkie sposoby, aby spróbowaæ utrzymaæ fizyczne poġḟczenie w dobrym zdrowiu, ale moṡna podjḟæ kroki w zakresie projektowania ġḟcza komunikacyjnego, które uczyni go bardziej niezawodnym. Dostêpnych jest wieleróṡnych sposobów sprawdzania, co reprezentujḟ te techniki. Wolê my¶leæ o nich w ten sam sposób: przesyġaæ dane wiêcej niṡ raz. W sytuacji, gdy haġas moṡe zepsuæ dane w kanale, odbiorca jest bardziej skġonny do pozyskania danych, je¶li jest wysyġany wiêcej niṡ raz. Je¶li odbiornik jest wystarczajḟco inteligentny, aby rozpoznaæ, kiedy dane sḟ uszkodzone, moṡe po prostu czekaæ na drugḟ pomoc dotyczḟcḟ tych samych danych. Jest to szczególnie waṡne w przypadku robotów znajdujḟcych siê w odlegġych lokalizacjach. Wysyġanie zduplikowanych danych moṡe odbywaæ siê na wiele róṡnych sposobów. Oczywi¶cie, moṡliwe jest wysġanie danych dwa lub trzy razy. Ale wierzcie lub nie, moṡliwe jest przesġanie danych 1,5 razy, 1,1 razy, a nawet 1,01 razy. W pewnych granicach projektanci robotów mogḟ wybieraæ spo¶ród kodów protokoġów komunikacyjnych, które pozwalajḟ im wybraæ ilo¶æ nadmiarowo¶ci wbudowanḟ w ġḟcze komunikacyjne. Poniewaṡ nadmiarowe dane zuṡywajḟ przepustowo¶æ, pozwala to projektantom decydowaæ o marnowaniu przepustowo¶ci. Wysyġanie dodatkowych danych skutecznie obniṡa BER, poniewaṡ bġêdy sḟ korygowane w odbiorniku. Uzyskanie niṡszego BER jest prawie równoznaczne z lepszym Eb / No. W ten sposób projektanci mogḟ powiedzieæ, ṡe zyskujḟ kodowanie z róṡnych kodów protokoġów komunikacyjnych. To wzmocnienie kodowania moṡe byæ w rzeczywisto¶ci zrealizowane, poniewaṡ wzmocnienie kodowania moṡna odjḟæ od Eb / No w rzeczywistym kanale, aby uzyskaæ taki sam BER w danej sytuacji. Dodaj wzmocnienie kodowania, zmniejsz zysk Eb / No i wyjdỳ nawet. W praktyce jednak wiêkszo¶æ inṡynierów przyjmuje zysk kodowania na podstawie istniejḟcego Eb / No i realizuje swój zysk jako niṡszy BER. Zdarza siê to w ġḟczno¶ci satelitarnej przez caġy czas. W rzeczywisto¶ci wiêkszo¶æ ġḟczy komunikacji satelitarnej jest zaprojektowana i okre¶lona za pomocḟ wzmocnienia kodowania wbudowanego bezpo¶rednio w protokóġ komunikacyjny. Poniewaṡ wiele kodów ma opcje parametryczne, operator ġḟcza satelitarnego moṡe wybraæ kod w locie, który odpowiada jako¶ci kanaġu. Je¶li ġḟcze satcom ma niskḟ warto¶æ No, moṡe byæ potrzebny niewielki wzrost kodowania, a szybko¶æ transmisji danych moṡe wzrosnḟæ. Je¶li ġḟcze satelitarne ma wysoki poziom No, wówczas moṡe byæ konieczne wzmocnienie kodowania, aby utrzymaæ jako¶æ danych kosztem niṡszej szybko¶ci transmisji danych.
DYSTRYBUCJA B£ÊDU
Projektanci robotów muszḟ równieṡ bardzo uwaṡnie przyjrzeæ siê kanaġowi. Przewidywanie BER jest jednḟ rzeczḟ z metody modulacji i kodowania, ale nie robi nic dobrego, je¶li plamy sġoneczne niszczḟ transmisjê przez minuty lub sekundy. Wspóġczynniki bġêdów sḟ ġḟczone; wszystkie ogniwa w ġañcuchu komunikacji muszḟ dziaġaæ w tym samym czasie. Bġḟd w jednym linku moṡe, ale nie musi, zostaæ poprawiony w innym ġḟczu w dóġ ġañcucha. Ponadto haġas jest nieprzewidywalny. Wġa¶nie dlatego nazywajḟ to haġasem. To prawda, ṡe ma pewne wġasno¶ci matematyczne, które sḟ niezawodne w ¶redniej, ale przypadkowe zdarzenia mogḟ prowadziæ do serii bġêdów, które mogḟ nie zostaæ przechwycone przez wybrany schemat kodowania. Musimy spojrzeæ na gêsto¶æ i rozkġad bġêdów w kanale, oprócz wskaỳnika bġêdu. Trzeba jeszcze powiedzieæ o rozkġadzie bġêdów. Niektóre schematy kodowania (jak Viterbi, które niedġugo otrzymamy) zbierajḟ wszystkie bġêdy w sieci i naprawiajḟ je wszystkie jednocze¶nie. Problem polega na tym, ṡe je¶li co¶ pójdzie nie tak i nie wszystkie mogḟ zostaæ naprawione, nastḟpi rozerwanie sieci i lokalna powódỳ bġêdów, które nie wystḟpiġyby naturalnie w taki sposób. Ten typ sytuacji jest w rzeczywisto¶ci spowodowany schematem kodowania z korekcjḟ bġêdów. System musi byæ przygotowany na przetrwanie takiego zdarzenia. Prawdopodobnie wszyscy widzieli¶my takie wybuchy bġêdów w trakcie meczów piġkarskich zza oceanu. Gra idzie dobrze, aṡ na ekranie pojawi siê ogromny czarny i zielony blok. Zobaczymy, dlaczego to nastḟpi wkrótce. Rzuæmy okiem na niektóre metody kodowania, które wysyġajḟ zduplikowane dane. Róṡne techniki majḟ ten sam podstawowy cel: zmniejszenie poziomu bġêdu poprzez wysġanie niektórych danych wiêcej niṡ raz. Techniki sḟ zasadniczo podzielone na dwie róṡne metody. Niektóre kanaġy komunikacji sḟ dwukierunkowe, a wiele z nich nie. Dwukierunkowy kanaġ komunikacji umoṡliwia retransmisjê danych na ṡḟdanie odbiorcy; jednokierunkowy kanaġ komunikacji nie.
KANA£Y KOMUNIKACJI DWUKIERUNKOWEJ
Dwukierunkowy kanaġ komunikacji umoṡliwia odbiornikowi wysyġanie nadajnika informacje o stanie kanaġu i integralno¶ci otrzymanych danych. W dwukierunkowym kanale komunikacyjnym wykorzystywanych jest kilka narzêdzi, które pomagajḟ w przesyġaniu zduplikowanych danych. Narzêdzia te nie sḟ ograniczone do wykorzystania w kanale dwukierunkowym, ale moṡna je wykorzystaæ w celu uzyskania maksymalnych korzy¶ci z ġḟcza zwrotnego. W rzeczywisto¶ci wszystkie narzêdzia uṡywane w jednokierunkowym kanale komunikacji bêdḟ dziaġaæ równieṡ w kanale dwukierunkowym.
SPRAWDZANIE BLOKÓW
Kiedy odbiorca otrzymuje dane, musi okre¶liæ, w miarê moṡliwo¶ci, czy kanaġ zmieniġ dane. Nie ma znaczenia, gdzie w kanale dane zostaġy zmienione. Haġas wywoġany burzḟ lub plamami sġonecznymi moṡe zmieniæ dane na trasie lub odbiornik mógġ mieæ tymczasowy usterkê zasilania. Liczy siê tylko to, czy bufor danych odbiornika ma te same dane, które zostaġy przesġane. Podobnie jak aspiryna butelek, które pochodzḟ z uszczelkḟ bezpieczeñstwa zapewniajḟcy ochronê, dane mogḟ byæ zapakowane w sumie kontrolnej, która bêdzie gwarantowaæ integralno¶æ danych. Suma kontrolna to seria bitów danych sġuṡḟcych do podsumowania bloku danych. Nadawca moṡe odciḟæ strumieñ danych w szeregu bloków, które mogḟ mieæ wiele bajtów. Suma kontrolna jest obliczana i doġḟczana do bloku danych przed transmisjḟ. Dobrze omówiæ, w jaki sposób sumy kontrolne sḟ obliczane póỳniej. Odbiornik zna, po wcze¶niejszym ustaleniu, sposób obliczania sumy kontrolnej. Odbiornik po otrzymaniu bloku danych (i sumy kontrolnej), niezaleṡnie oblicza sumê kontrolnḟ ponownie i porównuje jḟ z odebranḟ sumḟ kontrolnḟ. Je¶li wyniki sḟ róṡne, istnieje problem. Je¶li sumy kontrolne sḟ takie same, dane sḟ akceptowane, a odbiornik przechodzi do nastêpnego bloku. Ale zaġóṡmy, ṡe istnieje problem. W takim przypadku moṡliwe sḟ róṡne dziaġania.
Wykrywanie pojedynczego bġêdu
Je¶li przesġana suma kontrolna ma stosunkowo niewiele bajtów, moṡliwe, ṡe bġḟd moṡna wykryæ tylko. Moṡe nie byæ wystarczajḟcych informacji, aby je poprawiæ bġḟd lub nawet wykryæ wiêcej niṡ jeden bġḟd w bloku danych. Je¶li zostanie wykryty bġḟd, odbiornik moṡe poprosiæ nadajnik o ponowne przesġanie bloku informacji. Jeden protokóġ uṡywany w retransmisji danych jest omówiony póỳniej.
Wielokrotne wykrywanie bġêdów
Je¶li suma kontrolna zawiera wystarczajḟcḟ ilo¶æ danych (i odpowiedniḟ strukturê matematycznḟ), moṡe byæ moṡliwe wykrycie wiêcej niṡ jednego bġêdu w bloku danych. Uwaga: oznacza to, ṡe metoda sġabej sumy kontrolnej (z niewielkimi danymi w sumy kontrolnej) moṡe nawet nie wykryæ ṡadnego bġêdu, je¶li w bloku danych wystḟpi wiêcej niṡ jeden bġḟd. Rozwaṡ naturê kanaġu komunikacji uṡywanego w robocie. Je¶li moṡliwe jest wystḟpienie wiêcej niṡ jednego bġêdu w tym samym czasie, spróbuj zastosowaæ metodê sumy kontrolnej zdolnḟ do wykrycia co najmniej wielu bġêdów. Z pewno¶ciḟ moṡliwe jest wystḟpienie wielu bġêdów w tym samym czasie w dowolnym kanale komunikacyjnym. Kluczowym pytaniem, które powinien rozwaṡyæ projektant robotów, jest prawdopodobieñstwo takiego zdarzenia. Sprawdỳ prawdopodobieñstwo wystḟpienia bġêdów i rozkġadu bġêdów. Zakġadajḟc, ṡe wskaỳniki bġêdów sḟ maġe i ṡe Bġêdy wystêpujḟ niezaleṡnie, moṡna bezpiecznie zaġoṡyæ, ṡe szansa wystḟpienia dwóch równoczesnych bġêdów w bloku jest w przybliṡeniu kwadratem szansy na pojedynczy bġḟd w bloku. Projektant robota powinien obliczyæ ten podwójny wskaỳnik bġêdu i okre¶liæ, czy bêdzie to dopuszczalny poziom bġêdu, je¶li takie bġêdy prze¶lizgnḟ siê.
Korekta pojedynczego bġêdu
Je¶li suma kontrolna zawiera wystarczajḟce dane, aby wykryæ nie tylko bġḟd, ale równieṡ go skorygowaæ, dane moṡna skorygowaæ, zanim odbiornik przejdzie do nastêpnego bloku danych. Nie bêdzie wymagana retransmisja z nadajnika. Naleṡy zauwaṡyæ, ṡe nawet systemy korekcji bġêdów czasami bêdḟ popeġniaæ bġêdy. Siġa kodu korekcji bġêdów leṡy w matematyce protokoġu. Niektóre bġêdy mogḟ nawet nie zostaæ wykryte, niektóre bġêdy mogḟ nie zostaæ naprawione, a niektóre bġêdy zostanḟ niepoprawnie poprawione. Przy stosowaniu takich metod projektant robotów musi zbadaæ te poziomy bġêdów i porównaæ je z dopuszczalnym poziomem bġêdu.
Wielokrotna korekta bġêdów
Niektóre sumy kontrolne majḟ wystarczajḟcḟ ilo¶æ informacji do poprawienia bġêdów jednoczesnych. Naleṡy zachowaæ takie same ¶rodki ostroṡno¶ci, jak opisano wcze¶niej. Naleṡy pamiêtaæ, ṡe takie silne sumy kontrolne czêsto pochġaniajḟ duṡo przepustowo¶ci wysyġajḟc dodatkowe dane sumy kontrolnej; sumy kontrolne mogḟ zawieraæ wiele bajtów. Sumy kontrolne to mniejsze bloki danych, które podsumowujḟ wiêksze bloki danych. Czêsto sumy kontrolne nazywane sḟ cyklicznymi kontrolami nadmiarowo¶ci (CRC). Nastêpujḟce strony internetowe wskaṡḟ niewielkḟ róṡnicê. Oczywi¶cie, je¶li suma kontrolna zawiera wiêcej danych niṡ ten, który podsumowuje, nie jest to zbyt uṡyteczne. Caġa idea polega na podsumowaniu bloku przesyġanych danych w niewielkiej liczbie bajtów, aby byġa efektywna. Czêsto suma kontrolna skġada siê z 1 do 8 bajtów dodatkowych informacji podsumowujḟcych blok danych o dġugo¶ci od 32 do 1024 bajtów. Liczby te sḟ arbitralne, ale powszechne. Na przykġad protokóġ TCP / IP zazwyczaj zawiera bloki danych o dġugo¶ci 512 bajtów z sumami kontrolnymi o dġugo¶ci 2 bajtów. Bystry obserwator zauwaṡy, ṡe blok danych 512 bajtów mogḟ byæ wypeġnione w 2512x8 róṡnych sposobów. Jednak suma kontrolna z zaledwie 2 bajtami moṡe przyjḟæ tylko 65 535 (22x8) róṡnych warto¶ci sumy kontrolnej. Oznacza to, ṡe dla kaṡdej moṡliwej warto¶ci sumy kontrolnej okoġo 2256 (lub okoġo 7.4 x 1019) bloków danych bêdzie mieæ takḟ samḟ sumê kontrolnḟ. Jak wiêc uciec, mówiḟc, ṡe ten rodzaj sumy kontrolnej jest wystarczajḟcy dla aplikacji? Je¶li wystḟpi bġḟd, bġêdny blok danych moṡe byæ identyczny z jednym z kilku miliardów bloków danych z tḟ samḟ sumḟ kontrolnḟ. Kluczowḟ rzeczḟ do zapamiêtania jest to, ṡe pojedynczy bġḟd powinien skutkowaæ bġêdnym blokiem danych z jednḟ szansḟ w 65 536 na posiadanie tej samej sumy kontrolnej. Je¶li ten spadek wskaỳnika bġêdu nie jest wystarczajḟco dobry, zaprojektuj robota z wiêkszḟ sumḟ kontrolnḟ, która moṡe byæ dġuṡsza. Z pewno¶ciḟ, poniewaṡ algorytm matematyczny zostaġ wybrany do obliczania sumy kontrolnej, upewnij siê, ṡe najczêstsze bġêdy powodujḟ zmianê w sumach kontrolnych. Na przykġad bġḟd w jednym bicie moṡe byæ powszechny i powinien skutkowaæ innḟ sumḟ kontrolnḟ. Metoda obliczania sum kontrolnych jest czêsto opisywana przez wielomian, matematyczny sposób opisywania obliczeñ zwiḟzanych z obliczaniem sumy kontrolnej. Matematyka stojḟca za wyborem dobrego wielomianu wykracza poza zakres tej ksiḟṡki. Na szczê¶cie istnieje wiele standardowych wielomianów (niektóre wymienione poniṡej) i moṡemy wybieraæ spo¶ród nich, nie wymy¶lajḟc ich na nowo.
BITY PARZYSTOḊCI
Spójrzmy na przykġad prostej struktury sumy kontrolnej. Bity parzysto¶ci, jako czê¶æ struktury sum kontrolnych, mogḟ po prostu wskazywaæ liczbê bajtów. Zasadniczo, weỳ bajt i zlicz swojḟ liczbê w 8 bitach. Je¶li uṡywamy parzystego schematu parzysto¶ci, liczba bitów w bitach (w tym bit parzysto¶ci) musi byæ równa. Na przykġad, je¶li w bajcie danych znajduje siê parzysta liczba, to naleṡy dodaæ dziewiḟty bit parzysto¶ci zawierajḟcy zero do bajtu, aby zachowaæ parzysto¶æ parzystḟ. Je¶li liczba bajtów w bajcie jest nieparzysta, to dodaj jeden jako dziewiḟty bit parzysto¶ci, aby uzyskaæ parzysto¶æ. Je¶li zrobimy to dla kaṡdego bajtu w bloku danych, to bġêdy jednego bitu w dowolnym bajcie "zetnḟ" ten bajt jako zġy. Bêdziemy w stanie wykryæ bġêdy pojedynczego bitu w bloku danych kosztem zwiêkszenia danych o 1/8. Je¶li obliczymy równieṡ parzysto¶æ dla kaṡdego bitu, w caġym bloku danych uzyskamy wiêcej moṡliwo¶ci. Moṡemy na przykġad obliczyæ liczbê jedynek w pozycji 0 bitów dla caġego bloku danych i doġḟczyæ bajt parzysto¶ci kolumny na koñcu bloku danych zawierajḟcego pojedynczy 9- bitowy numer. Bajt parzysto¶ci kolumny bêdzie zawieraġ parzysto¶æ obliczonḟ dla 0, 1, 2,. . . ósmy i dziewiḟte kolumny bitów w bloku danych. Nastêpnie, je¶li pojedynczy bit jest uszkodzony w bloku danych, bit parzysto¶ci tego bajtu bêdzie sygnalizowaġ, który bajt jest bġêdny, a bajt parzysto¶ci kolumny pokaṡe nam, który bit jest bġêdny w tym bajcie. Umoṡliwi nam to poprawienie bġêdów pojedynczego bitu w bloku danych przez powielenie i rozszerzenie bloku danych o okoġo 1/8. To nie jest bardzo silny kod; lepsze mogḟ byæ tworzone. £atwo jest stworzyæ nasz wġasny kod, ale musimy byæ pewni, ṡe odpowiada wymaganiom ¶rodowiska operacyjnego robota. Siġa kodu powinna odpowiadaæ wskaỳnikom bġêdów, rozkġadowi bġêdów i tolerancji, którḟ robot ma na bġêdy.
SUMA KONTROLNA REEDA-SALOMONA
Jednym z najczê¶ciej uṡywanych obliczeñ sumy kontrolnej jest kod Reeda-Solomona (RS). Ten typ kodu moṡe korygowaæ wiele bġêdów w bloku danych. Powód, dla którego jest to uṡyteczne, zostanie wkrótce przedstawiony. Kodowanie RS równieṡ rozszerza blok danych przez doġḟczanie bajtów parzysto¶ci. Jednym popularnym kodem RS jest RS (255,233), który rozszerza 233-bajtowy blok danych do 256 bajtów, doġḟczajḟc 32 bajty sum kontrolnych parzysto¶ci, rozszerzajḟc blok danych o wspóġczynnik okoġo 14 procent. Wielomian RS (255,233) umoṡliwia jednoczesnḟ korektê do 16 róṡnych bajtów. Inny popularny kod RS jest wykorzystywany w satelitarnych transmisjach wideo. Standard Digital Video Broadcast-Satellite (DVB-S) zostaġ ustandaryzowany w zakresie transmisji wideo MPEG2 za pomocḟ, miêdzy innymi, RS (204188). Ten kod doġḟcza 16 bajtów sumy kontrolnej parzysto¶ci do bloku danych 188 bajtów dla rozszerzenia kodu o okoġo 8,5 procent. Wielomian RS (204,188) umoṡliwia jednoczesnḟ korektê do o¶miu róṡnych bajtów. Strona wy¶wietla obraz, pokazuje graficznie ilo¶æ nadmiarowych danych, pozwala nam wprowadzaæ bġêdy na obrazie graficznym za pomocḟ myszy i koryguje bġêdy na naszych oczach. Je¶li wprowadzono zbyt wiele bġêdów, bġêdów nie moṡna poprawiæ. To ilustruje ograniczenia kodowania blokowego.
RETRANSMISJA
Je¶li zostanie wykryty bġḟd, odbiornik moṡe wysġaæ NACK lub Potwierdzenie negatywne z powrotem do nadajnika. Ten komunikat NACK zaṡḟda retransmisji bġêdnego bloku danych. Niektóre dwukierunkowe protokoġy komunikacyjne wymagajḟ od odbiornika przesġania potwierdzenia (ACK), aby potwierdziæ odbiór kaṡdego doskonale dobrego bloku danych. Je¶li kanaġ komunikacyjny narzuca znaczḟce opóỳnienie na transmisje (na przykġad co moṡe siê zdarzyæ robotowi zdalnej sondy kosmicznej), wówczas wysġanie komunikatu ACK (lub NACK) dla kaṡdego bloku danych jest niepraktyczne. Jeṡeli protokóġ transmisji umoṡliwia nadajnikowi przesyġanie wielu bloków danych bez odbierania komunikatów z odbiornika, wówczas nadajnik musi doġḟczyæ identyfikator do kaṡdego wysyġanego bloku danych. Identyfikator jest czêsto po prostu kolejnḟ liczbḟ wystarczajḟcḟ do rozróṡnienia kaṡdego bloku danych od sḟsiednich sḟsiadów. Odbiornik po zidentyfikowaniu zġej sumy kontrolnej doġḟcza identyfikator uszkodzonego bloku do wiadomo¶ci NACK dla tego bloku. Kiedy nadajnik odbierze komunikat NACK, ponownie skġada siê z bloku danych, który odpowiada identyfikatorowi i przesyġa go ponownie. Odbiornik musi obliczyæ sumê kontrolnḟ otrzymanej retransmisji i zaakceptowaæ blok danych. Zauwaṡ, ṡe bêdzie to wymagaġo zarówno od odbiornika, jak i nadajnika do buforowania (przechowywania) wielu bloków danych w pamiêci podczas cyklu transmisji. Naleṡy pamiêtaæ, ṡe niektóre protokoġy komunikacyjne nie mogḟ uṡywaæ retransmisji jako narzêdzia aby zmniejszyæ bġêdy. Na przykġad ġḟcza wideo i audio nie mogḟ korzystaæ z retransmisji. Strumieni wideo i audio nie moṡna wstrzymaæ, gdy dane sḟ retransmitowane, poniewaṡ ekran zostanie wyzerowany. Te strumienie danych muszḟ byæ ciḟgle dostêpne w nadajniku i polegaæ wyġḟcznie na jednokierunkowej transmisji danych.
STROJENIE KANA£ÓW
Dwukierunkowe ġḟcze komunikacyjne moṡna zoptymalizowaæ w czasie rzeczywistym, wysyġajḟc sterowanie informacje w obu kierunkach. Kanaġy mogḟ siê zmieniaæ wraz z upġywem czasu, a czasem trzeba je odpowiednio skonfigurowaæ. Niektóre protokoġy komunikacyjne majḟ wbudowane sygnaġy sterujḟce i okre¶lone algorytmy dostrajania, które utrzymujḟ poġḟczenie komunikacyjne w zdrowiu i niezawodno¶ci. Do dostrojenia systemu moṡna uṡyæ nastêpujḟcych metod:
• Zasilanie £ḟcze do przesyġania danych czêsto dziaġa lepiej, je¶li do transmisji kaṡdego bitu wykorzystuje siê wiêcej mocy. Stosunek Eb / No jest bezpo¶rednio dotkniêty. Odbiornik moṡe zmierzyæ siġê sygnaġu, którḟ odbiera z nadajnika. Je¶li ustali, ṡe sygnaġ jest zbyt sġaby, odbiornik moṡe wysġaæ ṡḟdanie do nadajnika, aby zwiêkszyæ jego moc podczas nadawania. W ten sam sposób nadajnik moṡe zaṡḟdaæ od odbiorcy zwiêkszenia jego mocy nadawczej. Ta technika moṡe byæ stosowana we wszystkich dwukierunkowych ġḟczach komunikacyjnych, o ile moc pozostaje w granicach. Jednak to, co moṡna zrobiæ dziêki kontroli mocy, jest ograniczone. Zbyt duṡa moc moṡe zanieczy¶ciæ widmo i uniemoṡliwiæ prawidġowe dziaġanie ġḟcza komunikacyjnego. Odpowiednio skonstruowany protokóġ kontroli mocy dla ġḟcza komunikacyjnego czêsto zawiera ograniczenie odbieranej mocy. Jeṡeli odbiornik wyczuje zbyt duṡḟ moc sygnaġu pochodzḟcego z nadajnika, moṡe zaṡḟdaæ od nadajnika zmniejszenia siġy sygnaġu do akceptowalnego poziomu. W koñcu sygnaġ dla jednego odbiornika moṡe byæ po prostu szumem dla innego odbiornika. Konieczna jest zatem pewna wspóġpraca. Protokóġ wielokrotnego dostêpu z podziaġem kodowym (CDMA) wykorzystuje wġa¶nie taki protokóġ sterowania mocḟ, aby zoptymalizowaæ ġḟcze komunikacyjne. Ta technika jest szczególnie przydatna w sytuacjach, gdy telefon komórkowy przemieszcza siê z jednego obszaru do drugiego w samochodzie. Komórkowe stacje bazowe uṡywane przez telefon zmieniajḟ siê w miarê poruszania siê telefonu. Aby upewniæ siê, ṡe telefon jest dobrze zachowany i nie przeszkadza sḟsiednim telefonom, uṡywana jest regulacja mocy.
• Zmiany kodu Je¶li ġḟcze komunikacyjne zaczyna siê pogarszaæ, inna technika która moṡe byæ uṡyta to zmiana kodowania. Po wcze¶niejszym uzgodnieniu, odbiornik i nadajnik moṡe wstrzymywaæ i zmieniaæ metody kodowania. Silniejsze kody korekcji bġêdów tġumaczyæ bezpo¶rednio na wzmocnienie kodowania, które moṡna dodaæ do Eb / No. Tak jak mówili¶my wcze¶niej oznacza to zwykle, ṡe zostanie wysġana dodatkowa ilo¶æ zbêdnych danych w takiej czy innej formie. Poniewaṡ dodatkowe dane bêdḟ wysyġane przez kanaġ i od tego czasu kanaġ Eb / Brak warto¶ci jest juṡ marginalny, sensownym jest przej¶cie na niṡszy poziom przepustowo¶æ dla transmisji danych. Je¶li mniej faktycznych danych jest wysyġanych, wiêcej jest zbêdnych dane mogḟ byæ doġḟczane, a moc kanaġu na bit pozostaje taka sama. Konkretny przykġad tego moṡna znaleỳæ w transmisjach wideo MPEG. Wiêkszo¶æ Transmisje MPEG sḟ jednokierunkowe, ale niektóre ġḟcza wideo majḟ kontrolê zwrotnḟ kanaġy o znacznie niṡszej przepustowo¶ci. Chociaṡ wideo moṡe byæ przesyġane jednokierunkowo ġḟcza satelitarne, kanaġ rewersyjny moṡe zostaæ ustanowiony przez telefon. W miejscu nadajnika kompresor MPEG pobiera sygnaġ wideo i kompresuje uṡywajḟc algorytmów MPEG. Kompresor ma do wyboru kilka kompresji algorytmy, które mogḟ ¶ci¶nḟæ obraz wideo na coraz mniejsze ilo¶ci danych (kosztem jako¶ci obrazu). Kompresor nastêpnie koduje Dane MPEG do transmisji przez kanaġ za pomocḟ kodów Viterbi i RS, które doġḟcz nadmiarowe dane. Odbiornik uṡywa kodów Viterbi i RS, aby wyeliminowaæ bġêdy, a nastêpnie dekompresuje obraz wideo. Je¶li odbiornik nie moṡe poprawiæ wszystkich bġêdów, obraz zacznie siê rozpadaæ. Odbiornik moṡe uṡyæ ġḟcza do sterowania zwrotnego, aby zaṡḟdaæ lepszej metody kodowania kanaġów. Sprêṡarka w miejscu nadajnika uṡywa silniejszego algorytmu kompresji aby zmniejszyæ ilo¶æ wysyġanych danych i wybraæ silniejszḟ kombinacjê Viterbi i RS. Kodowanie kanaġu ponownie przywraca dane do pierwotnej warto¶ci. Odbiornik bêdzie wtedy w stanie skorygowaæ wszystkie bġêdy i przedstawiæ czysty obraz. Obraz wideo moṡe nie byæ tak dobry jak wcze¶niej (ze wzglêdu na dodatkowḟ kompresjê), ale przynajmniej obrazy przechodzḟ.
KANA£Y KOMUNIKACJI UNIDUALNEJ
Omówili¶my lub wspominali¶my juṡ wiele metod stosowanych w celu zmniejszenia liczby bġêdów kanaġy komunikacji. Z wyjḟtkiem wniosków o retransmisje, które sḟ niemoṡliwe w jednokierunkowy kanaġ komunikacji, moṡna stosowaæ wiêkszo¶æ tych samych technik. Omówimy jeszcze kilka uṡywanych protokoġów, ale nie zajmiemy siê zbyt duṡḟ gġêbiḟ. Jednak, aby odpowiednio okre¶liæ ġḟcze komunikacyjne dla robota, musimy zrozumieæ opcje. Musimy zdaæ sobie sprawê, ṡe jednokierunkowe ġḟcze komunikacyjne moṡe byæ z powodzeniem stosowane tylko wtedy, gdy speġnione sḟ nastêpujḟce dwa warunki:
• Docelowy wskaỳnik bġêdu odbiornika musi byæ ustawiony tak, aby byġ akceptowalny, biorḟc pod uwagê specyfikacjê dziaġania. Moṡemy do¶æ dobrze okre¶liæ z góry, jaki poziom bġêdu bêdzie akceptowalny dla dziaġania robota.
• Dane odbierane przez odbiornik muszḟ mieæ odpowiedniḟ ilo¶æ i jako¶æ, aby utrzymaæ wystarczajḟco wysokḟ szybko¶æ transmisji danych, a poziom bġêdu odbiorcy byġ poniṡej akceptowalnej warto¶ci docelowej.
Aby osiḟgnḟæ drugi cel, powinni¶my przejrzeæ dostêpne narzêdzia. W przypadku komunikacja dwukierunkowa, rozmawiali¶my juṡ o kodowaniu blokowym, tuningu kanaġu i retransmisji. Poniewaṡ zarówno tuningowanie kanaġów, jak i retransmisja nie sḟ moṡliwe bez kanaġu zwrotnego, powinni¶my zbadaæ kodowanie dalej. Omówili¶my juṡ kodowanie blokowe i sumy kontrolne o pewnej dġugo¶ci. Bity parzysto¶ci i kodowanie RS to narzêdzia, które mogḟ byæ uṡywane w jednokierunkowym ġḟczu komunikacyjnym. Czêsto nazwḟ jednokierunkowych metod korekcji bġêdów jest korekcja bġêdów w przód (FEC). Ma tê nazwê, poniewaṡ wszystkie informacje o korekcji bġêdów poruszajḟ siê do przodu; nie istnieje ġḟcze do odwrotnej komunikacji.
PO£ḂCZNE KODY
Ogólnḟ ideḟ ġḟczonych kodów jest gromadzenie losowo rozmieszczonych bġêdów w jednym miejscu, w którym moṡemy je wydajnie i niezawodnie wysyġaæ. To moṡe byæ nadmierne uproszczenie, ale tak wġa¶nie postrzegam tê technikê. Dane sygnaġu wideo MPEG sḟ nadawane w formacie DVB na satelitach przy uṡyciu tego typu poġḟczonego kodowania. Omówimy póỳniej kompresjê MPEG i format DVB. Opis kaṡdego bloku na rysunku jest nastêpujḟcy:
• Kompresor MPEG Przesyġane sygnaġy wideo, generowane przez kamerê wideo, sḟ akceptowane przez dane wej¶ciowe do kompresora MPEG. Sprêṡarka ma kilka silników do przetwarzania sygnaġów cyfrowych (DSP), które kompresujḟ sygnaġ. Omówimy kompresjê danych póỳniej.
• Koder RS Skompresowany sygnaġ jest przesyġany do nadajnika RS, który dodaje dane sumy kontrolnej, jak opisano powyṡej.
• Ukġad przeplotu Ukġad przeplotu jest urzḟdzeniem przeplatajḟcym dane, które pobiera sḟsiadujḟce bajty i oddziela je Nie rozszerza on bloku danych, który otrzymuje, ale zmienia kolejno¶æ bajtów w bloku danych. Celem elementu przeplatajḟcego jest uporzḟdkowanie danych, aby element rozplatajḟcy mógġ rozdzieliæ sḟsiednie bġêdy, czyniḟc je niezaleṡnymi.
• Kody ewolucyjne Koder splotowy skutecznie dodaje dodatkowe dane do kaṡdego symbolu danych. Istnieje kilka róṡnych rodzajów kodów splotowych, z których najbardziej popularnymi sḟ kody Viterbiego i Turbo. Kody te majḟ tendencjê do rozszerzania danych bardziej niṡ kodowanie RS, z wyjḟtkiem danych dodawanych niemal bajt po bajcie.
• Modulator Jak wspomniano wcze¶niej, modulator danych zmienia ksztaġty fali no¶nej zgodnie z przekazanymi danymi. Nawet po jednokrotnym modulowaniu danych wynikowy ksztaġt fali moṡe byæ modulowany po raz drugi w celu zwiêkszenia czêstotliwo¶ci dla okre¶lonych pasm czêstotliwo¶ci komunikacyjnych.
• Kanaġ Kanaġ transmisji danych jest standardowym ġḟczem komunikacyjnym (takim jak ġḟcze satelitarne) z bġêdami dodanymi w wyniku zakġóceñ i szumów.
• Demodulator Demodulator zasadniczo ma odwrotnḟ funkcjê modulatora. Czêsto czêstotliwo¶æ zostanie cofniêta raz z pierwszym etapem demodulatora. Dane zostanḟ nastêpnie oddzielone od fali no¶nej w koñcowym etapie demodulacji. Dane wyj¶ciowe demodulatora powinny byæ identyczne z danymi wej¶ciowymi modulatora, z wyjḟtkiem bġêdów wprowadzanych przez szum kanaġu.
• Dekoder konwolucyjny Dekoder splotowy skutecznie usuwa dodatkowe dane, które koder splotowy dodaje do kaṡdego symbolu danych. Dekoder musi pasowaæ do kodera splotowego. Wyj¶cie dekodera powinno byæ identyczne z wej¶ciem do enkodera splotowego, z wyjḟtkiem bġêdów wprowadzanych przez szum kanaġu.
• ozplatanie Element rozplatajḟcy to tasownik danych, który pobiera sḟsiadujḟce bajty i je rozdziela. Nie rozszerza on bloku danych, który otrzymuje, ale zmienia kolejno¶æ bajtów w bloku danych. Celem elementu rozplatajḟcego jest rozdzielenie sḟsiednich bġêdów (serii bġêdów) wychodzḟcych z dekodera. Powoduje to, ṡe kaṡdy bitowy bġḟd jest niezaleṡny.
• Dekoder RS Dekoder RS, jak to omówiono poprzednio, usuwa dane sumy kontrolnej i koryguje bġêdy, jak to omówiono poprzednio. Wyj¶cie dekodera RS, zakġadajḟc, ṡe wszystkie bġêdy kanaġów sḟ poprawione, jest identyczne z danymi wyj¶ciowymi ze sprêṡarki MPEG.
• Dekompresor MPEG Dekompresor ma silnik obliczeniowy DSP dekompresuje dane wideo MPEG. Wyj¶cie dekompresora jest transmisjḟ sygnaġ wideo odpowiedni do oglḟdania.
Kanaġ
Kanaġ transmisji danych jest standardowym ġḟczem komunikacyjnym z bġêdami dodanymi w wyniku zakġóceñ i szumów. Bġêdy danych mogḟ wystêpowaæ w przypadkowych odstêpach czasu lub w skoncentrowanych seriach. Takie bġêdy sḟ nastêpujḟce:
• Losowe bġêdy Losowe bġêdy sḟ najġatwiejsze do naprawienia. Istniejḟce poġḟczone kody sḟ dobrze dostosowane do ustalania losowych bġêdów.
• Wybuchy bġêdów Istniejḟce poġḟczone kody sḟ do¶æ dobrze dostosowane do naprawienia serii bġêdów. Te splotowe kody majḟ tendencjê do koncentrowania bġêdów w krótkich seriach. Oczywi¶cie, je¶li wystḟpi zbyt wiele bġêdów, nie wszystkie mogḟ zostaæ naprawione.
• Regularnie bġêdy przestrzeni Istniejḟce poġḟczone kody majḟ najwiêcej problemów z bġêdami, które wystêpujḟ w regularnych odstêpach czasu. Szczególnie kody kodów RS sḟ najsġabsze w korygowaniu takich bġêdów. Nie znaczy to, ṡe kody te nie zajmḟ siê bġêdami dystrybuowanymi w taki sposób. Po prostu ostroṡnie zaprojektuj ġḟcze komunikacyjne, je¶li haġas jest w jaki¶ sposób zorganizowany.
• Demodulator Ogólnie rzecz biorḟc, demodulator nie dodaje zbyt wiele szumu do sygnaġów w kanale. Doda to niewielkḟ ilo¶æ, ale zanim demodulator zakoñczy pracê, caġy szum kanaġu zostanie zamieniony w cyfrowy szum, dane z pewnymi bġêdami. Losowy szum z kanaġu jest pokazany w niezmienionej postaci po demodulacji.
• Dekoder konwolucyjny Dekoder splotowy ma tendencjê do gromadzenia bġêdów i ich korygowania. Kiedy siê nie powiedzie, przepuszcza seriê bġêdów. Ogólnie rzecz biorḟc, zwykle zbiera bġêdy w czasie. Jest to najbardziej uṡyteczna funkcja, poniewaṡ spowoduje, ṡe wyj¶cie elementu rozplatajḟcego bêdzie bardzo przewidywalne. Haġas jest pokazany zebrany w impulsy po dekoderze splotowym.
• Rozplatanie Element rozplatajḟcy pobiera serie bġêdów, które wychodzḟ z dekodera splotowego i rozkġada je równomiernie w czasie. To ustawia je wszystkie indywidualnie wybierane przez dekoder RS i poprawiane. Wy¶wietlany jest haġas rozġoṡyæ na regularny wzór po rozplataniu.
• Dekoder RS Dekoder RS, jak wspomniano wcze¶niej, jest w stanie korygowaæ bġêdy wielu bajtów w bloku danych. Wiêkszo¶æ poġḟczonych kodów jest skonstruowanych w taki sposób, ṡe seria bġêdów wychodzḟcych z dekodera splotowego nie zawiera na ogóġ wiêcej bajtów, niṡ dekoder RS jest zdolny do korygowania. Haġas jest pokazany caġkowicie skorygowany po dekoderze RS. Zakoñczyġo to okre¶lony cel pokazujḟcy, jak dziaġajḟ poġḟczone kody. W praktyce, oczywi¶cie, zawsze pojawia siê pewien haġas.
• Dekompresor MPEG Dekompresor MPEG nie dodaje ṡadnych bġêdów do strumieñ danych. Takie kody sḟ wykorzystywane w transmisji danych wideo przez ġḟcza satelitarne.
KODY KONWERGENCYJNE
Kody ewolucyjne zwiêkszajḟ nadmiarowo¶æ danych w strumieniu danych. Dekodery majḟ pamiêæ wewnêtrznḟ i opóỳniajḟ wyj¶cie danych. Nadmiarowe dane moṡna dodaæ na kilka róṡnych sposobów.
Zwiêkszanie przepustowo¶ci
Oczywi¶cie, nadmiarowe dane moṡna po prostu dodaæ do istniejḟcych danych. Je¶li tak siê stanie, do transmisji dodatkowych danych wymagana jest dodatkowa przepustowo¶æ. Moṡemy zilustrowaæ to opisywanie
Kody Viterbiego.
Enkoder Viterbi (w nadajniku) Kiedy moṡemy zwiêkszyæ przepustowo¶æ, kody Viterbiego okre¶lajḟ automat stanów, który ma nierozwiniête dane jako dane wej¶ciowe. Automat stanów tworzy dane wyj¶ciowe. Maszyna stanów zmienia stany w zaleṡno¶ci od przepġywu bitów danych wej¶ciowych. Kaṡdy z nich i zero od nierozwiniêtych danych robi dwie rzeczy:
• Zmienia stany Stan automatu zmienia stan dla kaṡdego z nich i nadchodzi zero od nierozwiniêtych danych wej¶ciowych.
• Dane wyj¶ciowe Za kaṡdym razem, gdy automat stanów odbiera bit wej¶ciowy i zmienia stan, wyprowadza niektóre dane. Generalnie, wiêcej bitów jest wyprowadzanych niṡ wej¶cie, wiêc enkoder Viterbiego rozszerza dane.
Poniewaṡ w maszynie stanu Viterbiego istniejḟ wiêcej niṡ dwa stany, kaṡda zmiana stanu wyklucza niektóre pañstwa na korzy¶æ tych dwóch stanów, które sḟ jedynymi moṡliwymi skutkami zmiany. Je¶li, na przykġad, automat stanów ma cztery stany, to jeden lub zero moṡe tylko spowodowaæ zmianê automatu stanów na jeden z dwóch róṡnych stanów. Pozostaġe dwa stany to zabronione zmiany. Jest to klucz do tego, w jaki sposób dekoder Viterbiego poprawia bġêdy.
Dekoder Viterbiego
To wielkie uproszczenie, ale oto krótkie wyja¶nienie, w jaki sposób dekoder Viterbiego koryguje bġêdy. Dekoder Viterbiego wie a priori, w jaki sposób Viterbi funkcje enkoderów. Poniewaṡ dekoder zna zachowanie enkodera, moṡe wykryæ podejrzane dane zmienione przez szum w kanale. Losowe zmiany spowodowane szumem nie mogḟ w peġni na¶ladowaæ aktywno¶ci enkodera. Zatem dekoder moṡe wykrywaæ oznaki sabotaṡu. Dekoder przyjmuje bity wej¶ciowe przychodzḟce bezpo¶rednio z kanaġu przez demodulator. Dekoder posiada równieṡ automat stanów, który zmienia stany na podstawie odebranych bitów danych. Gdy odbierane sḟ rozszerzone dane wej¶ciowe, maszyna stanu dekodera wykonuje dwie rzeczy:
• Stan zmian Poniewaṡ rozszerzone bity danych sḟ odbierane z demodulatora, sḟ dekodowane w celu okre¶lenia nastêpnego stanu maszyny stanu dekodera. Historia zmian stanu jest akumulowana z powrotem kilka cykli.
• Dane wyj¶ciowe Gdy maszyna stanu dekodera zmienia stany, wyzwala zbadanie danych o zmianie stanu historycznego. Je¶li dane historyczne majḟ sens, nastêpnie dekoder wyprowadza nierozwiniête dane, które sḟ przechowywane w danych historycznych. Ogólnie rzecz biorḟc, wyj¶cie ma mniej bitów niṡ dane wej¶ciowe. W ten sposób dekoder Viterbiego pobiera pierwotnie nierozwiniête dane.
Dekoder nie wysyġa ṡadnych nieuporzḟdkowanych danych, dopóki nie upewni siê, ṡe je przeczesaġ bġêdy ze strumienia wej¶ciowego. Oszczêdzi to danych, dopóki tak siê nie stanie. Dekoder przeglḟda najnowszḟ historiê zmian stanu, aby sprawdziæ, czy te zmiany majḟ sens. Je¶li historia wyglḟda podejrzanie, dekoder Viterbiego uwaṡa, ṡe jeden lub wiêcej odebranych bitów danych mogġo byæ bġêdne. Jeden po drugim dekoder przeglḟda najnowszḟ historiê, analizuje kaṡdy otrzymany ostatnio bit wej¶ciowy i rozwaṡa, co by siê staġo, gdyby ten bit byġ bġêdny. Dekoder okre¶la, jak hipotetyczna historia wyglḟdaġaby w tym przypadku. Je¶li hipotetyczna historia wyglḟda znacznie lepiej, dekoder uwzglêdnia fakt, ṡe bit wej¶ciowy mógġ byæ bġêdny. Gdy dekoder znajdzie najbardziej satysfakcjonujḟcḟ historiê hipotetycznḟ, wyprowadza te hipotetyczne dane jako prawdziwe, poprawione, nierozwiniête dane. Jak wspomnieli¶my wcze¶niej, je¶li dekoder Viterbiego nie moṡe poprawiæ wszystkich bġêdów, to przynajmniej gromadzi je wszystkie w jednym miejscu. Poniewaṡ przechowuje historiê danych przed podjêciem decyzji i uzyskaniem danych wyj¶ciowych, wypisze wszystkie ostatnie bġêdy w serii, gdy zawiedzie w swoim zadaniu. Nawet w przypadku niepowodzenia jest to klucz do sukcesu. Element rozplatajḟcy rozkġada seriê bġêdów, aby kody RS mogġy je korygowaæ. Wyobraỳ sobie dekoder Viterbiego, ale pomiñ jego bġêdy w jednym rogu i wyceluj je w dekoder RS, aby zamiast tego moṡna byġo je wyczy¶ciæ. Przypominamy, ṡe ta wersja kodowania Viterbiego odnosi siê do przypadku, w którym transmitujḟcy koder Viterbiego moṡe rozszerzaæ dane przed transmisjḟ. Enkoder w ten sposób organizuje nierozwiniête dane w rozszerzone dane, które majḟ w sobie rozpoznawalne wzorce. Te rozpoznawalne wzorce danych sḟ tym, co sprawdza dekoder, aby okre¶liæ, czy odebrane, rozszerzone dane sḟ podejrzane. Metryka, której dekoder uṡywa do badania danych, to odlegġo¶æ Hamminga (caġkowita liczba róṡnic bitowych) miêdzy rzeczywistymi odebranymi danymi a hipotetycznymi odebranymi danymi. Algorytm Viterbiego jest wbudowany w wiele standardowych systemów komunikacyjnych. Najwaṡniejszḟ rzeczḟ, o której naleṡy pamiêtaæ przy korzystaniu z algorytmu Viterbiego, jest to, ṡe ma róṡne stopnie siġy w zaleṡno¶ci od pewnych parametrów. Je¶li parametry moṡna zmieniaæ, silniejsze kody bêdḟ miaġy tendencjê do rozszerzania danych bardziej.
Pasmo ograniczone
Czasami nie ma dodatkowej przepustowo¶ci do pracy i nie moṡemy uṡywaæ kodowania Viterbiego do rozszerzania danych w ogóle. Je¶li chcemy, aby czê¶æ przesġanych danych byġa nadmiarowa, musimy wyrzuciæ jakḟ¶ przepustowo¶æ. Trochê mniej oryginalnych danych jest przesyġanych, ale przepustowo¶æ
jest wypeġniona pewnymi nadmiarowymi danymi. Caġkowita przepustowo¶æ pozostaje niezmieniona. Operator ġḟcza komunikacyjnego musi zdecydowaæ, ile przepustowo¶ci danych ma poddaæ siê. Moṡna zastosowaæ kodowanie Trellis i dekodowanie Viterbiego. Kody te rozszerzajḟ dane o ostatecznḟ warto¶æ na podstawie siġy kodowania. Operator ġḟcza komunikacyjnego moṡe wybraæ kod i zmniejszyæ dane wej¶ciowe o odpowiedniḟ warto¶æ, aby rozszerzenie kodu wypeġniaġo przepustowo¶æ kanaġu. Pamiêtaj, ṡe celem tego rodzaju kodowania jest uporzḟdkowanie danych wej¶ciowych za pomocḟ rozpoznawalnych wzorów, aby dekoder mógġ okre¶liæ, czy zakġócenia kanaġu zmieniġy go. Technika zwykle stosowana do tego celu polega na po¶wiêceniu niektórych pozycji symboli w konstelacji symbolu. Zaġóṡmy na przykġad, ṡe konstelacja symbolu pokazuje 64 QAM, które widzieli¶my wcze¶niej. W przypadku QAM, która nie jest zakodowana, wszystkie przej¶cia sḟ moṡliwe. Sygnaġ moṡe przej¶æ od dowolnego znaku X do dowolnego innego znaku X, aby zasygnalizowaæ transmisjê 6 dodatkowych bitów (26 = 64). Ale moṡliwe jest ograniczenie moṡliwych przej¶æ w rozpoznawalny sposób. Je¶li, na przykġad, moṡna przeskoczyæ tylko z jednego znaku X do zaledwie 32 innych znaków X, to tylko przej¶cie przez 5 (25 = 32). Szybko¶æ przesyġania danych byġaby zredukowana o poġowê, ale sygnaġ musiaġby byæ zgodny z odrêbnym zestawem reguġ, które byġyby znane dekoderowi. Dekoder byġby wówczas w lepszej pozycji do wykrycia bġêdów za pomocḟ ¶rodków, opisanych wcze¶niej. Innḟ technikḟ ograniczania przej¶æ, jakie mogḟ uzyskaæ symbole, jest dosġowne dostarczanie dodatkowych pozycji symbolu. Rozwaṡmy na razie system 16 QAM z konstelacjḟ symbolu

Moṡna podwoiæ liczbê pozycji symboli, aby utworzyæ system 32 QAM i podwoiæ je ponownie, aby utworzyæ system 64 QAM. Symbole w systemie 32 QAM mogḟ byæ rozmieszczone w dowolnym ukġadzie geometrycznym, ale najlepiej upakowane w przybliṡeniu koġa
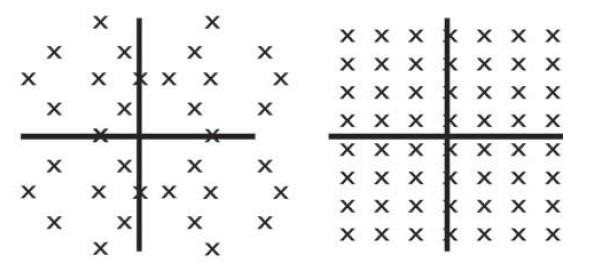
Jeṡeli system 16 QAM nadal bêdzie transmitowaġ równowarto¶æ 4 bitów na symbol, koder moṡe spakowaæ dane nadmiarowe przez ograniczenie 32 lub 64 róṡnych lokalizacji symboli, które bêdḟ dozwolone przej¶cia. To skutecznie wprowadza moṡliwy do zidentyfikowania wzór w danych bez zwiêkszania przepustowo¶ci. Moṡna nadal uṡywaæ dekodera Viterbiego, ale wykorzystuje on odlegġo¶æ miêdzy symbolami jako wskaỳnik, poniewaṡ wyszukuje podejrzane przej¶cia danych.
Kodowanie Turbo
Pewne postêpy poczyniono od czasu, gdy Viterbi wydaġ swoje kody pod koniec lat 60. Zġoṡono¶æ dekodera Viterbiego ma tendencjê do wzrostu wykġadniczego w celu zwiêkszenia przyrostu kodowania. Klasyczne kody turbo sḟ juṡ od jakiego¶ czasu niedostêpne, z duṡo lepszymi wynikami, ale klasyczne kody turbo majḟ pewne ograniczenia, osiḟgajḟc limit poniṡej limitu miasta Shannon capa. Ponadto, klasyczne kody turbo sḟ skomplikowane do obliczenia i wykorzystania kosztownego sprzêtu. Kodowanie produktów Turbo (ulepszenie klasycznych kodów turbo) jest bardziej obiecujḟce. Technika ta pozwala wyznaczonemu projektantowi ġḟcza komunikacyjnego uzyskaæ arbitralnie bliskḟ granicê pojemno¶ci Shannona, przesyġajḟc tyle danych przez kanaġ, na ile pozwala na to wspóġczynnik S / N. Wymagana jest duṡa ilo¶æ obliczeñ, ale obliczenia sḟ zwykle iteracyjne i nadajḟ siê do implementacji w krzemie. Wydajno¶æ jest w duṡej mierze ograniczona limitami pamiêci. Kody produktów Turbo zastêpujḟ caġy poġḟczony ġañcuch RS, Viterbi. Osiḟgniêta wydajno¶æ moṡe przynie¶æ krzywḟ BER w arbitralnie maġej liczbie dB limitu Shannon. Kodowanie jest podobne do kodu blokowego RS, z bajtami danych i sumy kontrolnej, ale ma kilka róṡnic. Przede wszystkim, podczas gdy RS ma rzḟd danych i bajtów sumy kontrolnej, kody produktów turbo majḟ trójwymiarowḟ strukturê. Sumy kontrolne sḟ obliczane dla wszystkich trzech wymiarów dla danych: x, yi z. W ten sposób oryginalne dane otrzymujḟ sumy kontrolne bġêdów w wielu kierunkach. Dekoder ma stosunkowo prosty silnik obliczeniowy. Dekoder dziaġa na jednḟ sumê kontrolnḟ jednocze¶nie, wykonujḟc sumy kontrolne wektorowe X, Y i Z w oddzielnych obliczeniach. Za kaṡdym razem, gdy silnik obliczeniowy dekodera wprowadza poprawki na wektorze, zmienia wyniki w pozostaġych dwóch wymiarach. Gdy dekoder zostanie uṡyty we wszystkich wektorach we wszystkich trzech wymiarach, caġy proces moṡe rozpoczḟæ siê od nowa. Dekoder moṡe przetwarzaæ dane tyle razy, ile potrzeba, aby dane byġy jak najlepsze. Im wiêcej razy dekoder jest uṡywany, tym lepsze wyniki. Je¶li wiadomo, ṡe dane zawierajḟ wiele bġêdów szumu, dekoder moṡe byæ uṡywany kilka razy. Je¶li wiadomo, ṡe dane sḟ do¶æ czyste, dekoder moṡe byæ uṡyty jeden lub dwa razy. Wystarczajḟca ilo¶æ informacji jest wbudowana w pierwotnie przesġane dane, dziêki czemu dekoder wie, kiedy przerwaæ iteracjê otrzymanych danych.
PRZEPLATANIE
Przeplatanie jest sposobem na rozprzestrzenianie siê bġêdów. Czêsto stosowany bêdzie schemat korygujḟcy bġêdy zepsuj, je¶li bġêdy wystḟpiḟ w regularnym wzorze. Na przykġad kody Viterbiego zbieraj bġêdy w skoncentrowanych seriach. Moduġ przeplotu pobiera sḟsiadujḟce dane i rozsuwa je, podobnie jak talia kart jest tasowana. Dane nie sḟ po prostu rozwiniête uporzḟdkowane. Enkoder moṡe przeplataæ dane przed transmisjḟ, a dekoder moṡe rozplataæ dane po odebraniu. Przeplatanie moṡna wykonaæ na wiele róṡnych sposobów, z których kaṡdy przenosi okre¶lone wady i zalety. Oto dolny wiersz na przeplatanie. Ogólnie, je¶li przeplatanie jest uṡywane w standardowym protokole ġḟcza komunikacyjnego, wszystkie opcje sḟ juṡ okre¶lone. W takim przypadku ṡaden wybór nie wpġynie na wydajno¶æ ġḟcza komunikacyjnego.
Dostêp wspóġdzielony
£ḟcza komunikacyjne sḟ czêsto uṡywane przez wiele jednostek komunikacyjnych: ỳródġa i miejsca docelowe. Czasami byty sḟ na osobnych komputerach; czasami sḟ w oddzielnych procesach na tym samym komputerze. Je¶li ġḟcze ma wiele ỳródeġ i miejsc docelowych, musi rywalizowaæ o wykorzystanieġḟcza komunikacyjnego. Czêsto warstwa fizyczna nie pozwala im jednocze¶nie korzystaæ z ġḟcza komunikacyjnego. Projektant ġḟcza komunikacyjnego musi opracowaæ strategiê, która umoṡliwi kaṡdej jednostce komunikacyjnej maksymalnḟ ilo¶æ dostêpu do odpowiedniej jednostki komunikacji na drugim koñcu ġḟcza. Biorḟc pod uwagê, ṡe ġḟcze komunikacyjne ma ograniczonḟ przepustowo¶æ, projektanci muszḟ zwracaæ uwagê na wiele róṡnych wymagañ.
PASMO
Kaṡda sesja komunikacyjna miêdzy jednostkami ma róṡne wymagania dotyczḟce przepustowo¶ci. Wymagania dotyczḟce przepustowo¶ci mogḟ zmieniaæ siê z czasem. Niektóre sesje wymagajḟ bardzo staġej przepustowo¶ci, a niektóre sesje nagle wymagajḟ duṡego procentu dostêpnej przepustowo¶ci. Sesje te bêdḟ przedstawiaæ róṡne typy wymagañ dotyczḟcych przepustowo¶ci.
Surowe pasmo
Róṡne sesje komunikacyjne mogḟ mieæ róṡne wymagania dotyczḟce przepustowo¶ci.
Zmiany w przepustowo¶ci
Niektóre sesje komunikacyjne majḟ wymagania dotyczḟce przepustowo¶ci, które zmieniajḟ siê w nieprzewidziany sposób. W ¶rodowisku wspóġdzielonym czêsto wymaga czasu na negocjacje w celu uzyskania wiêkszej (lub mniejszej) przepustowo¶ci. Potrzeba czasu, aby zakoñczyæ takie negocjacje, a projektant musi wziḟæ to pod uwagê. Ponadto róṡne sesje komunikacyjne mogḟ mieæ wszystkie zmieniajḟce siê wymagania dotyczḟce przepustowo¶ci. Przedstawia klasyczny problem, jak spakowaæ wszystkie konkurencyjne wymagania do dostêpnej przepustowo¶ci. Nawet je¶li istnieje wystarczajḟca przepustowo¶æ, aby zaspokajaæ sumê arytmetycznḟ wszystkich wymaganych przepustowo¶ci, nadal moṡe nie byæ moṡliwe spakowanie ich razem w kanale. Ten problem jest zredukowany do klasycznego matematycznego problemu pakowania. Ten problem przypomina próbê spakowania róṡnej wielko¶ci bloków w pudeġku. Nie ma prawie ṡadnego sposobu, aby to zrobiæ bez marnowania miejsca. Nawet je¶li wszystkie bloki mogḟ siê zmie¶ciæ na raz, moṡe nie byæ wystarczajḟco duṡo czasu na okre¶lenie wġa¶ciwego rozwiḟzania. Wynik netto jest taki, ṡe peġne pasmo rzadko jest osiḟgane w tych okoliczno¶ciach Naleṡy równieṡ zauwaṡyæ, ṡe niektóre odbiorniki odbierajḟ bufory, które nie mogḟ przepeġniaæ lub niedopeġnione. Dotyczy to transmisji MPEG, dlatego naleṡy zapoznaæ siê z poniṡszḟ sekcjḟ. Istnieje moṡliwo¶æ zmiany szeroko¶ci pasma kanaġu z powodu bġêdów. Stanowi to ten sam problem, co róṡne wymagania. Czasem bġêdy muszḟ byæ akceptowane.
Gwarantowana przepustowo¶æ
Niektóre ġḟcza komunikacyjne wymagajḟ gwarantowanej przepustowo¶ci. Strumienie danych wideo MPEG powracajḟce z robota wymagaġyby na ogóġ staġej przepustowo¶ci. Taka przepustowo¶æ musiaġaby byæ wcze¶niej zarezerwowana lub przynajmniej nie powinna podlegaæ ponownej renegocjacji.
Odwrotna przepustowo¶æ kanaġu
Przepustowo¶æ jest czêsto uwaṡana za parametr jednokierunkowy. Prawda jest taka, ṡe je¶li kanaġ jest dwukierunkowy, przepustowo¶æ musi byæ wystarczajḟca w obu kierunkach. Moṡe to znacznie zlikwidowaæ systemy, w których przepustowo¶æ jest ustawiona pod wpġywem chwili.
OPÓỲNIENIA
Kilka rodzajów opóỳnieñ moṡe zakġóciæ poġḟczenie komunikacyjne. Wszystkie ġḟcza komunikacyjne majḟ opóỳnienie. Nawet z prêdko¶ciḟ ¶wiatġa dane mogḟ zajḟæ mikrosekundy, aby przekroczyæ granicê
hrabstwa. Wiêkszo¶æ sygnaġów elektrycznych porusza siê znacznie wolniej. Elektroniczne tablice do komunikacji majḟ znaczny czas przetwarzania, co opóỳnia dane. Je¶li pêtle sterowania w czasie rzeczywistym zaleṡḟ od ¶cieṡki komunikacyjnej, opóỳnienia te muszḟ zostaæ obliczone w projekcie systemu. W niektórych systemach przepustowo¶æ jest usuwana, gdy nie jest potrzebna. Ponadto, gdy wymagana jest przepustowo¶æ, musi byæ wymagana i przyznana. Opóỳnienie w odzyskaniu uprawnieñ do kanaġu komunikacji naleṡy dodaæ do opóỳnienia komunikacji w celu okre¶lenia najgorszego przypadku opóỳnienia.
PRYWATNOḊÆ
Wkrótce omówimy kwestie bezpieczeñstwa i prywatno¶ci. Jedynym powodem, dla którego warto tu wspomnieæ o prywatno¶ci, jest to, ṡe wspólne kanaġy komunikacji niosḟ dodatkowe ryzyko podsġuchu. Jest to szczególnie waṡne, gdy wszyscy uṡytkownicy majḟ moṡliwo¶æ zobaczenia caġego ruchu. Systemy TCP / IP czêsto majḟ to ograniczenie.
WSPÓLNE ḊRODOWISKO DOSTÊPU
System, w którym wiele podmiotów wspóġdzieli ġḟcze komunikacyjne, moṡe byæ zaprojektowany na wiele sposobów. Czasami sama natura ¶rodowiska komunikacyjnego dyktuje stosowane metody. Oto kilka czynników, które projektant robota powinien wziḟæ pod uwagê przy wybieraniu systemu komunikacji, który bêdzie obsġugiwaġ wiele jednostek, które majḟ dostêp do kanaġu.
Zamkniêty system
Je¶li dostêp do systemu komunikacyjnego jest ograniczony, projektant moṡe ogólnie liczyæ na jednolito¶æ reakcji. Caġy system powinien zachowywaæ siê zgodnie z przewidywano architekturê i protokoġy. Je¶li ġḟcze komunikacyjne musi byæ wspóġdzielone z nieznanymi jednostkami komunikacyjnymi, mogḟ wystḟpiæ róṡnego rodzaju problemy.
Limity obciḟṡenia
£ḟczna ilo¶æ ruchu komunikacyjnego, który ġḟczy ġḟcze, jest czêsto okre¶lana zarówno przez protokóġ, jak i dziaġania uṡytkowników w ġḟczu. £ḟcze komunikacyjne nie jest niczym niezwykġym, je¶li chodzi o uġamek nieprzetworzonej prêdko¶ci bitowej ġḟcza.
Uṡytkownicy spóġdzielni
Je¶li jednostki komunikacyjne wspóġpracujḟ, wówczas moṡna zwiêkszyæ uṡytecznḟ przepustowo¶æ ġḟcza komunikacyjnego. Je¶li jednostki komunikacyjne mogḟ byæ zsynchronizowane, wówczas mogḟ w do¶æ wydajny sposób dzieliæ ġḟcze komunikacyjne.
RODZAJE WSPÓ£DZIELONEGO DOSTÊPU
Jak wspomniano wcze¶niej, wspóġpraca miêdzy jednostkami komunikacyjnymi, które dzielḟ ġḟcze komunikacyjne, jest korzystna. Oto kilka konkretnych rodzajów wspóġuṡytkowanego dostêpu uzgodnienia do¶æ ogólne. Te same rodzaje wspólnych ustaleñ dotyczḟcych dostêpu sḟ stosowane w wielu róṡnych standardach komunikacji. Je¶li system komunikacyjny jest funkcjonalnie identyczny z tymi systemami, to oġówki matematyczne sḟ wy¶wietlane w ten sam sposób. Granice efektywnej przepustowo¶ci sḟ bardzo realne.
SYSTEMY DZIELENIA CZASU
Wspóġdzielony dostêp do ġḟcza komunikacyjnego moṡe zostaæ osiḟgniêty poprzez podzielenie tego na podstawie podziaġu czasowego, podziaġu czêstotliwo¶ci lub podziaġu kodu.
System Aloha
System ġḟczno¶ci Aloha zostaġ zaprojektowany tak, aby nadawca mógġ po prostu przesġaæ pakiet na kanale, kiedy tylko chciaġ. Je¶li inny nadawca wysġaġ pakiet w tym samym czasie, zderzḟ siê i oba pakiety zostanḟ utracone. Poniewaṡ coraz wiêcej nadawców konkuruje o kanaġ, system szybko siê ġaduje. Sposób w jaki wyrysowuje siê matematykê, tylko 18 procent nieprzetworzonej przepustowo¶ci kanaġu jest naprawdê dostêpne po wyczerpaniu siê systemu. Normalne systemy 10BT LAN dziaġajḟ w ten sposób; kolizje zrujnujḟ pakiety danych. Poniewaṡ 10BT LAN zaczyna siê obciḟṡaæ coraz wiêkszḟ liczbḟ uṡytkowników, ogólna efektywna przepustowo¶æ systemów 10BT nie jest nieprzetworzonḟ szybko¶ciḟ bitowḟ wynoszḟcḟ 10 Mb / s, ale jest bliṡsza 1,8 Mb / s. W sieci LAN 10BT limit ten moṡna poprawiæ tylko w przypadku uṡytkowników wspóġpracowaæ.
Rozciêta Aloha
System Aloha moṡna ulepszyæ, je¶li nadawcy sḟ zsynchronizowani. Kaṡdy nadawca wie, kiedy pojawiajḟ siê szczeliny czasowe i moṡe rozpoczḟæ transmisjê tylko na poczḟtku szczeliny czasowej. Zderzenia nadal wystêpujḟ, ale ten rodzaj wspóġpracy miêdzy nadawcami zwiêksza efektywnḟ przepustowo¶æ kanaġu do okoġo 35 procent jego nieprzetworzonej prêdko¶ci bitowej.
Zastrzeṡona Aloha
Je¶li nadawcy grzecznie zarezerwujḟ czasy z wyprzedzeniem, efektywna przepustowo¶æ kanaġu jeszcze siê zwiêkszy. Chociaṡ czê¶æ przepustowo¶ci jest marnowana przy dokonywaniu rezerwacji, zderzenia sḟ w duṡej mierze wyeliminowane, a wydajno¶æ moṡe byæ wysoka. Tylko szczeliny czasowe rezerwacji sḟ marnowane. Rezerwacje mogḟ byæ przyznawane na wiele sposobów, w tym roundrobin, systemy priorytetowe i losowy wybór. To od projektanta robota zaleṡy, jaki rodzaj systemu "przydziaġu na ṡḟdanie" przyjḟæ.
SYSTEMY PODZIA£U CZÊSTOTLIWOḊCI
Z pewno¶ciḟ moṡliwe jest umieszczenie róṡnych jednostek komunikacyjnych na róṡnych czêstotliwo¶ciach w ramach dopuszczalnych czêstotliwo¶ci kanaġu komunikacyjnego. Pojawia siê kilka problemów, takich jak przydzielanie czêstotliwo¶ci i separacja czêstotliwo¶ci.
Przydziaġ czêstotliwo¶ci
Wszystkie te same problemy z rezerwowaniem rezerwacji pasma wystêpujḟ w systemach podziaġu czêstotliwo¶ci. Je¶li czêstotliwo¶æ nie zostanie wykorzystana, przepustowo¶æ zostanie zmarnowana. Jeṡeli rezerwacje sḟ wymagane, wówczas istnieje zapotrzebowanie na rezerwacjê.
Przydziaġ czêstotliwo¶ci
Wszystkie te same problemy z rezerwowaniem rezerwacji pasma wystêpujḟ w systemach podziaġu czêstotliwo¶ci. Je¶li czêstotliwo¶æ nie zostanie wykorzystana, przepustowo¶æ zostanie zmarnowana. Jeṡeli rezerwacje sḟ wymagane, wówczas istnieje zapotrzebowanie na rezerwacjê.
Rozdzielanie czêstotliwo¶ci
Kanaġy komunikacyjne na sḟsiadujḟcych czêstotliwo¶ciach nie mogḟ ingerowaæ w siebie nawzajem. Filtry sġuṡḟ do usuwania sḟsiednich czêstotliwo¶ci z pasma komunikacyjnego. Poniewaṡ nie moṡna stworzyæ doskonaġych filtrów, musimy pozostawiæ dodatkowḟ szeroko¶æ pasma miêdzy pasmami czêstotliwo¶ci. Nie moṡna spakowaæ róṡnych pasm czêstotliwo¶ci zbyt blisko siebie. Zarówno nadajnik jak i odbiornik wpadajḟ w kġopoty, je¶li sḟ zbyt blisko. Kilka innych problemów moṡe pojawiæ siê, gdy pasma czêstotliwo¶ci sḟ zapakowane blisko siebie.
• Znieksztaġcenie. Nadajnik moṡe mieæ problemy z znieksztaġceniem intermodulacji. Rozwaṡmy przypadek, w którym dwie czêstotliwo¶ci, f1 i f2, sḟ wzmacniane i konwertowane w górê razem. Rezultatem sḟ niechciane sygnaġy znieksztaġceñ o czêstotliwo¶ciach (f2 - f1) i (f1 + f2).
• ISI Jeṡeli czêstotliwo¶ci sḟ zbyt blisko siebie, elektronika obsġugujḟca kaṡdḟ czêstotliwo¶æ moṡe mieæ problem z odfiltrowaniem sḟsiednich sygnaġów. Chociaṡ systemy podziaġu czêstotliwo¶ci sḟ opġacalne i dziaġajḟ dobrze, systemy podziaġu czasu i podziaġu kodu ukradġy grzmot tej technologii
SYSTEMY ODDZIA£YWANIA KODÓW
Systemy podziaġu kodu uṡywajḟ szyfrowania, w którym dane kaṡdego uṡytkownika sḟ niewidoczne dla innych uṡytkowników.
Wielodostêp z podziaġem kodowym (CDMA)
Systemy CDMA, znane równieṡ jako systemy widma rozproszonego (SS), zazwyczaj wykorzystujḟ szerokie pasmo czêstotliwo¶ci. Dane dla kaṡdego uṡytkownika sḟ rozġoṡone w caġym pa¶mie czêstotliwo¶ci za pomocḟ kodu rozpraszajḟcego. Komunikacja kaṡdego uṡytkownika jest transmitowana w pa¶mie w tym samym czasie, ale nie przeszkadzajḟ sobie nawzajem. Kaṡdy uṡytkownik otrzymuje unikalny kod rozpowszechniania, który sġuṡy do oddzielania uṡytkowników. Ze wzglêdu na naturê kodów, miêdzy uṡytkownikami wystêpuje niewielka lub ṡadna ingerencja. Ponadto nie jest wymagana synchronizacja miêdzy uṡytkownikami. W 1940 r. Aktorka z Hollywood, której twórcḟ byġ Hedy Lamarr, opracowaġa urzḟdzenie czêstotliwo¶ciowe do uṡytku wojskowego. Miġo jest mieæ tu swoje zdjêcie w¶ród wszystkich mêṡczyzn w sproszkowanych biaġych perukach. Zaproponowano jej jeden interesujḟcy cytat: "Kaṡda dziewczyna moṡe byæ efektowna. . . wszystko, co musi zrobiæ, to staæ w miejscu i wyglḟdaæ gġupio. "Oto jak dziaġajḟ najbardziej popularne systemy SS. Kaṡdemu uṡytkownikowi przypisany jest zakodowany przebieg rozproszenia:
U(codei)
Gdzie codei jest unikalnym kodem uṡytkownika, który wybiera charakterystykê przebiegu U(codei). Przebiegi te sḟ zwykle seriḟ impulsów, które majḟ nastêpujḟcḟ charakterystykê. Natomiast x reprezentuje bit przez mnoṡenie (korelacjê):
U (codei) x U(codek) = Z << 1
chyba ṡe k = i i oba przebiegi sḟ zsynchronizowane, w takim przypadku
U (codei) x U (codei) = 1
Ponadto U (codei) x B jest bardzo maġe dla nieskorelowanych sygnaġów (takich jak transmisje radiowe), które mogḟ juṡ istnieæ w kanale. Oznacza to, ṡe sygnaġy SS mogḟ wspóġistnieæ (nakġadaæ siê) w kanale z istniejḟcymi uṡytkownikami komunikacji. W niektórych protokoġach SS dane sḟ najpierw modulowane przez rozkġadany przebieg przed transmisjḟ. Rozwaṡmy przypadek, w którym kanaġ jest wypeġniony przebiegami dwóch uṡytkowników. Moṡemy wyodrêbniæ jednego uṡytkownika w nastêpujḟcy sposób:
Kanaġ = Di x U (codei) + Dk x U(codek)
gdzie i i k sḟ róṡne, a Di to dane od uṡytkownika i.

Podobnie, przebieg falowy dla uṡytkownika k moṡe byæ ġatwo wyodrêbniony. Z drugiej strony komunikacja SS moṡe wspóġistnieæ z istniejḟcymi, nieskorelowanymi sygnaġami komunikacyjnymi w kanale. W zasadzie pozwala to na ponowne wykorzystanie widma kanaġu. Po stronie minusowej róṡne kody nie sḟ caġkowicie ortogonalne. Poprzedni niewielki sygnaġ Z jest mnoṡony przez liczbê innych uṡytkowników i moṡe zakġócaæ odbiór. Moṡe to ograniczyæ liczbê uṡytkowników.
Kompresja
Czêsto przepustowo¶æ dostêpna dla komunikacji cyfrowej jest ograniczona. Moṡe siê tak zdarzyæ kilka róṡnych powodów:
• Regulowane widmo Rzḟd moṡe regulowaæ dostêp do widma i sprawiaæ, ṡe wszyscy go dzielḟ.
• Koszt Czêsto za drogie jest nabywanie praw do potrzebnego spektrum.
• Energia Jak juṡ wspomniano wcze¶niej, dosġownie wysyġajḟc bity przez kanaġ bezprzewodowy wymagane jest odpowiednio wysokie Eb / No. W transmisji satelitarnej ten fakt dosġownie wraca do domu, gdy baterie satelitarne i panele sġoneczne walczḟ o dostarczenie energii kaṡdemu. Roboty w odlegġych lokalizacjach czêsto sḟ przeciwko temu problemowi. Nie zapominaj jednak o jednej rzeczy. Najpierw trzeba skompresowaæ dane za pomocḟ energii. Proces kompresji moṡe byæ bardzo energooszczêdny, a caġy proces bêdzie musiaġ zostaæ poddany analizie.
Bez wzglêdu na przyczynê wysyġanie bezuṡytecznych danych przez kanaġ jest maġo istotne. Wiêkszo¶æ komunikacji cyfrowej moṡna skompresowaæ do mniejszej ilo¶ci danych. Shannon bawiġa siê tym nieco dġuṡej. Aby przetestowaæ tê asercjê, wybierz kilka róṡnych typów plików na komputerze i spróbuj skompresowaæ je za pomocḟ programu WinZip.exe, programu stanowiḟcego znak towarowy firmy WinZip Computing, Inc. Czêsto moṡna osiḟgnḟæ nastêpujḟce wielko¶ci kompresji:
• Standardowe pliki tekstowe Wspóġczynnik od 6 do 10.
• Pliki programów Wspóġczynnik 2.
• Pliki wideo lub graficzne Wspóġczynnik 1,1.
Spróbuj skompresowaæ tego typu pliki za pomocḟ narzêdzia WinZip , aby zobaczyæ, co moṡna osiḟgnḟæ. Je¶li komunikacja cyfrowa robota musi zostaæ skompresowana przed transmisjḟ, dostêpnych jest kilka opcji. WinZip moṡe nie nadawaæ siê do uṡytku na komputerze robota. Prawdopodobnie biblioteka oprogramowania systemu operacyjnego robota (lub oprogramowanie typu freeware) moṡe juṡ mieæ narzêdzia do kompresji, które mogḟ byæ uṡywane. Dwa podstawowe typy kompresji sḟ powszechnie uṡywane przez te programy. Techniki te sḟ uṡywane w standardowych programach kompresji i moṡna je przepisaæ na potrzeby robota.
Transformaty Fouriera
Transmisje graficzne i wideo sḟ rutynowo kompresowane za pomocḟ transformacji Fouriera. W przypadku kompresji wideo MPEG, obrazy sḟ konwertowane na szereg wspóġczynników, które sḟ kompresowane ponownie przy uṡyciu kompresji dġugo¶ci dziaġania (opisanej póỳniej). Moṡna osiḟgnḟæ wspóġczynniki kompresji 50: 1. Nie jest ġatwo napisaæ (od zera) program do wykonywania tego typu kompresji
Kompresja Run-Length
Jednḟ z najstarszych i najbardziej intuicyjnych technik kompresji jest prosta dġugo¶æ kompresja. Zamiast wysyġaæ na przykġad seria 2,415 zerowy poṡegnañ, moṡemy po prostu wysġaæ pakiet danych, który ma okoġo 4 bajty, tġumaczḟc, ṡe reprezentuje 2415 bajtów zerowych. Protokóġ jest prosty i moṡna go zapisaæ od podstaw, je¶li zajdzie taka potrzeba.
Kompresja Huffmana
Kompresja Huffmana moṡe byæ uṡyta, je¶li dane moṡna podzieliæ na symbole (np. Bajty tekstowe). Nastêpnie wszystkie symbole sḟ ponownie przypisywane innym kodem przed transmisjḟ. Najczê¶ciej przesyġanym symbolom przypisywane sḟ krótkie kody. Symbole, które sḟ rzadko przesyġane, majḟ przypisane dġuṡsze kody. Stosowane jest równieṡ kodowanie biegunowe
Szyfrowanie i bezpieczeñstwo
Wystḟpienia majḟ miejsce, gdy dane muszḟ zostaæ zaszyfrowane przed ich przesġaniem. Fizyczne poġḟczenia wiêkszo¶ci kanaġów komunikacyjnych poruszajḟ siê przez obszary, które sḟ publiczne. Oczywi¶cie, caġa komunikacja radiowa (RF), która przemieszcza siê przez wolne miejsce, moṡe zostaæ przechwycona, a komunikacja telefoniczna przechodzi przez zwykġe okablowanie i urzḟdzenia. Wszyscy sġyszeli¶my o niesġawnych hakerów, którzy podsġuchujḟ i tworzḟ inne problemy w Internecie. Uṡyjemy terminu hacker, aby odnosiæ siê do nieautoryzowanych stron, które mogḟ okazaæ siê nie na miejscu. Hakerzy majḟ róṡne motywy i kaṡdy haker chciaġby przejḟæ kontrolê nad robotem. Podobnie jak w przypadku komunikacji internetowej, transmisje radiowe i ruch telefoniczny równieṡ podlegajḟ ingerencji ze strony hakerów. Przesyġane dane moṡna odczytaæ lub zmieniæ na trasie. Oto lista rzeczy, które mogḟ siê nie udaæ, gdy zaangaṡowany jest haker:
• Odmowa usġugi (DoS) Je¶li haker zatnie ġḟcze komunikacyjne, polecenia do robota mogḟ siê nie przedostaæ.
• Podsġuchujḟcy hakerzy mogḟ odczytaæ dane robota i uzyskaæ niezbêdne informacje, których mogḟ uṡyæ.
• Podszywajḟcy siê hakerzy mogḟ stanowiæ elementy ỳródġowe lub docelowe.
Mogḟ wtedy pojawiæ siê nastêpujḟce problemy:
• Bġêdne polecenia Robot moṡe otrzymywaæ faġszywe polecenia i wykonywaæ operacje które mogġyby zniszczyæ misjê.
• Faġszywe dane Dane mogḟ zostaæ sfaġszowane lub zmienione. Integralno¶æ badañ naukowych i misji gromadzḟcych dane moṡe zostaæ zagroṡona.
• Zerwana komunikacja Je¶li hakerowi uda siê sfaġszowaæ innḟ jednostkê komunikacyjnḟ, caġy ġañcuch komunikacji moṡe zostaæ przerwany w przyszġo¶ci.
Problemy bezpieczeñstwa i hakerów moṡna rozwiḟzaæ na wiele sposobów. Wprowadzono szereg standardów szyfrowania i wzmacniania ġḟczy komunikacyjnych, aby zapobiec interwencji hakerów. Niektóre z tych metod sḟ bardziej skuteczne niṡ inne. Wiêkszo¶æ zwykġych hakerów jest nieszkodliwych, ale wystarczajḟco zdeterminowani hakerzy sḟ tam, aby zġamaæ prawie kaṡdy kod. Zasadniczo zapytaj,
co by siê staġo, gdyby haker miaġ peġny dostêp do ġḟcza komunikacyjnego. Co jest najgorszego, co moṡe pój¶æ nie tak? Je¶li twoje dane sḟ nudne lub niewaṡne, nie przejmuj siê. Jednak minimalne bezpieczeñstwo jest czêsto korzystne i nie kosztuje wiele. Pamiêtaj jednak, ṡe roboty sḟ atrakcyjnym celem technologicznym. Perspektywa wġamania siê do robota obudzi nawet najbardziej ¶piḟcego hakera. W skrócie, jakie rodzaje poprawek sḟ dostêpne? Podsġuch staje siê prawie bezuṡytecznym æwiczeniem, je¶li dane sḟ caġkowicie zaszyfrowane. Ponadto, faġszowanie staje siê niemoṡliwe, je¶li wiadomo¶æ ma wystarczajḟce uwierzytelnienie, aby zweryfikowaæ nadawcê. Metody zapewniania szyfrowania i uwierzytelniania sḟ opisane w poniṡszych adresach URL. Wiele bibliotek oprogramowania komputerowego zawiera podprogramy wspierajḟce bezpiecznḟ komunikacjê. Je¶li strumieñ danych przesunie siê zbyt szybko w celu zaszyfrowania oprogramowania, dostêpne sḟ ukġady sprzêtowe, które mogḟ szybciej szyfrowaæ informacje.
STANDARD SZYFROWANIA DANYMI (DES)
DES zyskaġ poparcie rzḟdu i jest obecny w wielu transakcjach handlowych dzisiaj. Metody obliczeñ sḟ do¶æ proste, a chipsety sḟ dostêpne dla szybkich implementacji
RSA
Zabezpieczenia RSA opierajḟ siê na tym, ṡe bardzo trudno jest uwzglêdniaæ duṡe liczby. Je¶li haker moṡe wziḟæ pod uwagê ogromnḟ liczbê w mniej niṡ kilka lat, haker moṡe wġamaæ siê do ġḟcza komunikacyjnego. Jak dotḟd okazaġo siê to zbyt trudne
PRETTY GOOD PRIVACY (PGP)
Zabezpieczenia PGP opierajḟ siê równieṡ na trudnych obliczeniach matematycznych i sḟ oferowane w kilku wersjach.Ataki DOS majḟ miejsce, gdy zdeterminowany haker wysyġa pakiety do robota, z którym nie moṡe sobie poradziæ. Niektóre ataki DoS obejmujḟ wysyġanie pakietów z nielegalnḟ strukturḟ danych; Inne ataki DoS polegajḟ na wysyġaniu zbyt wielu pakietów, wiêc kanaġ zostaje zatkany. Upewnij siê, ṡe twoje oprogramowanie moṡe obsġugiwaæ pakiety z nielegalnymi strukturami i rozwaṡ testowanie go z symulowanymi danymi ataku DoS.
Popularne kanaġy komunikacji
Projektujḟc robota, warto trzymaæ siê wypróbowanych i prawdziwych protokoġów komunikacyjnych. Kilka protokoġów, zarówno dla kanaġów komunikacji bezprzewodowej, jak i przewodowej, jest dostêpnych i popularnych. Zwykle oznacza to, ṡe sprzêt i oprogramowanie moṡna zakupiæ od rêki. Roboty nie tylko muszḟ byæ zaprojektowane szybko, ale muszḟ byæ niezawodne. Dlatego sprawdỳ rodowód kaṡdego komercyjnego produktu. £atwo powiedzieæ, ṡe produkt jest zgodny ze standardem, ale wiêkszo¶æ tych standardów jest tak zġoṡona, ṡe nowsze oferty nie sḟ tak niezawodne, jak starsze, bardziej ugruntowane produkty.
SYSTEMY BEZPRZEWODOWE
Kilka bezprzewodowych systemów danych zostaġo wdroṡonych na kilka lat. Omówimy niektóre funkcje i wydajno¶æ kaṡdego z nich.
Wireless Fidelity (Wi-Fi)
Wireless Fidelity (Wi-Fi) lub 802.11b to bezprzewodowa wersja sieci Ethernet LAN. Uṡywa komunikacji RF w pa¶mie 2,4 GHz, a protokóġ jest udokumentowany w 802.11b. Wiele osób ma w swoich komputerach przeno¶nych karty, które mogḟ korzystaæ z portali Wi-Fi w sklepach, firmach i miejscach
publicznych. Technologia ta zapewnia dostêp do Internetu uṡytkownikom komputerów przeno¶nych. Byġby to ¶wietny ġḟcznik komunikacyjny dla robota, o ile zabezpieczenia i inne problemy sḟ obsġugiwane prawidġowo. Przepustowo¶æ danych jest podobna do przepustowo¶ci przewodowych sieci LAN 10BT, o których mówili¶my wcze¶niej (okoġo 1,5 Mb / s). Zasiêg transmisji wynosi kilkaset stóp, ale prêdko¶æ transmisji danych moṡe spa¶æ po 50 stopach. Protokóġ wykorzystuje komunikacjê o widmie rozproszonym, jak omówiono wcze¶niej. Jako taki jest ekspertem w nakġadaniu istniejḟcego spektrum komunikacyjnego i wspóġistnieje z ruchem komunikacyjnym w nim. Szybsze wersje protokoġu wġa¶nie wychodzḟ teraz.
Dane GPRS (General Packet Radio Service)
Ogólno¶wiatowy system GPRS (General Packet Radio Service) obsġuguje transmisjê danych. Chociaṡ czêstotliwo¶æ w Stanach Zjednoczonych jest inna niṡ w innych krajach, moṡliwo¶ci transmisji danych sḟ podobne. System danych GPRS wykorzystuje komunikacjê radiowḟ w pasmach od 800 do 960 MHz, a przepustowo¶æ danych wynosi co najwyṡej 170 Kb / s, ale w praktyce najlepiej ograniczyæ oczekiwania do jednej dziesiḟtej tego. Zasiêg transmisji jest podobny do telefonów komórkowych i podlega podobnym strefom zaciemnienia w zaleṡno¶ci od poġoṡenia geograficznego. Protokóġ wykorzystuje komunikacjê globalnego systemu komunikacji mobilnej (GSM) i wielodostêpu z podziaġem czasu (TDMA) z wḟskopasmowḟ modulowanḟ komunikacjḟ GMSK i multipleksowaniem z podziaġem czasu (TDM). W zwiḟzku z tym uṡytkownicy mogḟ negocjowaæ wiêcej slotów czasowych i wiêkszḟ przepustowo¶æ danych bez utraty dokġadno¶ci.
Bluetooth
Bluetooth to kanaġ RF, który jest nieco nowy i po prostu wchodzi w jego wġasnḟ. To teṡ, wykorzystuje komunikacjê radiowḟ w pa¶mie 2,4 GHz i GFSK (kluczowanie z przesuniêciem czêstotliwo¶ci). To wykorzystuje komunikacjê w zakresie widma rozproszonego (poprzez chmurê czêstotliwo¶ciowḟ) w 79 róṡnych pasmach o szeroko¶ci 1 MHz. Przeznaczony jest do komunikacji na krótkich dystansach 10 metrów. Przepustowo¶æ danych moṡe byæ tak szybka jak 723 Kb / s, ale praktyczne ograniczenia ograniczajḟ szeroko¶æ pasma do okoġo poġowy. To sprawia, ṡe jest ona sġaba dla wideo, ale dobra dla komunikacji internetowej. Jest ekspertem w nakġadaniu istniejḟcego spektrum komunikacyjnego i wspóġistnieje z ruchem komunikacyjnym w nim.
Stowarzyszenie danych podczerwieni (IRDA)
£ḟcze standardowe podczerwieni (IRDA) to kanaġ podczerwieni, który istnieje od pewnego czasu. Wykorzystuje ¶wiatġo podczerwone do komunikacji krótkiego zasiêgu o dġugo¶ci okoġo 1 do 2 metrów. Wykorzystuje czêstotliwo¶ci pasma podstawowego modulowane do 1,5 MHz, aby przesyġaæ dane z prêdko¶ciḟ do 4 Mb / s. Jest powszechnie uṡywany do krótkich sesji komunikacyjnych miêdzy komputerowymi urzḟdzeniami peryferyjnymi
SYSTEMY PRZEWODOWE
Kilka przewodowych systemów komunikacyjnych jest obecnie szeroko rozpowszechnionych. Wszystkie mogḟ obsġugiwaæ protokoġy wyṡszego poziomu, wiêc zaczniemy od warstw fizycznych.
Sieæ telefoniczna
Do przesyġania danych moṡna wykorzystywaæ powszechne systemy telefonów komórkowych, które moṡna wykonaæ na kilka róṡnych sposobów:
• Wybierane usġugi Kilka firm (np. AOL) ma numery telefonów, które automat moṡe poġḟczyæ z Internetem. Modemy sḟ wymagane do obsġugi poġḟczeñ z liniḟ telefonicznḟ. Te modemy majḟ górny kraniec od 33 do 56 Kb / s. Maksymalna prêdko¶æ zazwyczaj zaleṡy od jako¶ci poġḟczenia telefonicznego. Usġugê moṡna odmówiæ, je¶li linia jest zajêta.
• Cyfrowa linia abonencka (DSL) Biorḟc pod uwagê, ṡe jeden przewód telefoniczny jest juṡ dostêpny W domu, firmy telefoniczne wykorzystujḟ podziaġ czêstotliwo¶ci do umieszczenia sygnaġów DSL na drucie. Ruch gġosowy wykorzystuje czêstotliwo¶ci poniṡej 10 kHz (co najwyṡej). Sygnaġy DSL zwykle wykorzystujḟ ten sam przewód do przenoszenia sygnaġów QAM z przepġywno¶ciḟ okoġo 1 Mb / s. Usġuga jest ciḟgġa iw duṡej mierze oparta na Internecie. Usġuga moṡe zostaæ przerwana, je¶li robot nie bêdzie wykonywaæ poġḟczenia komunikacyjnego od czasu do czasu. Firma telefoniczna odbiera adres IP robota, je¶li robot nie pracuje zbyt dġugo. Upewnij siê, ṡe robot jest aktywny, a nastêpnie zachowuje swojḟ rezerwacjê IP (DHCP) w stanie nienaruszonym.
Sieci kablowe
Wiele domów ma równieṡ telewizjê kablowḟ wchodzḟcḟ do domu. Chociaṡ system kablowy byġ pierwotnie zaprojektowany jako system jednokierunkowy, wiele systemów kablowych ma teraz kanaġy zwrotne, które mogḟ przenosiæ informacje z domów do firmy kablowej. Standardem, z którego korzysta wiêkszo¶æ firm telewizji kablowej, jest Standardowy Interfejs Danych Strukturalnych (DOCSIS), który zapewnia dostêp do podziaġu czasu dla abonentów macierzystych. System kablowy jest systemem zamkniêtym, wiêc warstwa fizyczna moṡe byæ zastrzeṡona. Sposoby modulacji stosowane sḟ Quadrature Phase Shift Keying (QPSK), 16 QAM (powyṡej) i 64 QAM (w dóġ), wsparte RS kodowania, jak omówiono wcze¶niej. Zasadniczo teoretycznie moṡna kupiæ dowolny modem DOCSIS i uṡywaæ go w systemie kablowym, ale nie zawsze tak jest. DOCSIS zapewnia prêdko¶æ transmisji danych do 56 Mb
/ s i prêdko¶æ przesyġania danych do 3 Mb / s. Jednak caġa przepustowo¶æ danych musi byæ dzielona miêdzy wszystkich uṡytkowników (i informacja o sterowaniu pasmami bocznymi).
Lokalne sieci lokalne (LAN)
Jednym z najbardziej popularnych przewodowych systemów komunikacyjnych dla komputerów jest sieæ LAN i Internet. Sieæ LAN to metoda ġḟczenia komputerów w budynku lub maġym kampusie. Internet to sieæ ġḟczḟca komputery na caġym ¶wiecie. Najpierw przyjrzymy siê fizycznej warstwie, a nastêpnie omówimy podstawy niezbêdne do zaplanowania poġḟczenia LAN dla robota. Warstwa fizyczna Najpopularniejszḟ metodḟ ġḟczenia siê z sieciḟ LAN jest Ethernet. Wiêkszo¶æ komputerów ma karty NIC lub poġḟczenia, które mogḟ przyjmowaæ zġḟcza Ethernet przy prêdko¶ci transmisji danych 10BT / 100BT. 1000BT (i jego warianty) zapewnia 10-krotno¶æ przepustowo¶ci, ale na razie jḟ zignorujemy. Górny koniec powszechnie dostêpnej przepustowo¶ci danych wynosi 100 Mb / s przy 100BT. Ale jak juṡ wcze¶niej mówili¶my, Ethernet LAN to system Aloha ze szczelinḟ bez zastrzeṡeñ. W zwiḟzku z tym nieskoordynowany ruch zazwyczaj przekracza 18 procent nieprzetworzonej przepustowo¶ci sieci. Metodḟ transmisji sḟ dane NRZ pasma podstawowego, jak omówiono wcze¶niej, ale trudnḟ czê¶ciḟ nie jest warstwa fizyczna. Najtrudniejszḟ czê¶ciḟ korzystania z sieci LAN jest konfiguracja. Aby oswoiæ to, potrzeba eksperta System LAN, wiêc planuj intensywne konsultacje z personelem informatycznym przed podjêciem decyzji w sprawie sieci LAN dla robota. Przed ustawieniem zadadzḟ mnóstwo pytañ do sieci LAN, aby robot mógġ z niej korzystaæ. Dostarczḟ adres IP, którego potrzebuje robot funkcja, jak równieṡ ġḟczno¶æ z innymi komputerami, których robot bêdzie musiaġ uṡyæ adres. Ponadto mogḟ skonfigurowaæ robota z innymi usġugami, których moṡe wymagaæ, na przykġad e-mail i dostêp do Internetu. Przed obróceniem robota w sieci LAN musimy omówiæ kilka podstawowych kwestii. Ksiḟṡki wyja¶niajḟce, jak skutecznie korzystaæ z sieci LAN, majḟ czêsto tysiḟc stron. Poniṡej przedstawiono podstawowe fakty najczê¶ciej uṡywane w projektowaniu ġḟcza komunikacyjnego LAN dla robota. Fakty te nie wyja¶niajḟ w dostatecznym stopniu szczegóġów dotyczḟcych zakoñczenia inṡynierii w ġḟczu LAN, ale okre¶lajḟ moṡliwo¶ci sieci LAN, aby moṡna byġo zaplanowaæ poġḟczenie komunikacyjne robota.
Komunikacja TCP (bez bġêdów)
Je¶li wymagane sḟ bezbġêdne transfery danych, sesja danych w sieci LAN musi zostaæ skonfigurowana za pomocḟ poġḟczenia przez gniazdo. Kaṡdy komputer podġḟczony do sieci LAN (i Internetu) ma okre¶lony adres. Wiêkszo¶æ komunikacji bêdzie miêdzy robotem a konkretnym komputerem (punkt do punktu). Poġḟczenie musi zostaæ najpierw nawiḟzane przed transferem. Wiêkszo¶æ systemów operacyjnych dla oprogramowania komputerowego ma stosy (wzorowane na stosie OSI), które pomagajḟ w tworzeniu wszystkich wymaganych poġḟczeñ. Mimo, ṡe oprogramowanie nie jest trudne do napisania, ma sens, aby do¶wiadczony inṡynier oprogramowania napisaġ oprogramowanie do komunikacji LAN. Je¶li niedo¶wiadczona osoba napisze oprogramowanie, bêdzie miaġo bġêdy, które póỳniej spowodujḟ powaṡne problemy. Programista wywoġa stos oprogramowania, uzyska adres IP, nawiḟṡe poġḟczenie (nazywane gniazdem), przekaṡe wszystkie dane i zamknie gniazdo pod koniec sesji.
Protokóġ komunikacyjny bez protokoġu UDP (User Datagram Protocol)
Czasami komunikacja bezbġêdna nie jest wymagana. W rzeczywisto¶ci czasami jest to niemoṡliwe. Rozwaṡ komunikacjê wideo. Poniewaṡ odbiorniki wideo wymagajḟ staġego strumienia danych, w ogóle nie ma czasu na cofniêcie i ponowne przesġanie informacji w bġḟd. Zamiast tego ekran wideo po prostu zawiesza siê na chwilê, aṡ pojawiajḟ siê nowe dane. Komputer wysyġajḟcy nie musi z góry nawiḟzywaæ poġḟczenia. Moṡe po prostu okre¶liæ adres IP komputera odbierajḟcego i rozpoczḟæ transmisjê. Komputer odbiorczy nie musi w ogóle wysyġaæ sygnaġów.
Nadawanie
W rzeczywisto¶ci, je¶li adresy IP sḟ skonfigurowane poprawnie, wiele komputerów moṡe odbieraæ przesyġane dane (zwane równieṡ datagramami UDP) w tym samym czasie. Ta technika nazywa siê rozgġaszaniem i jest przydatnym sposobem na uzyskanie informacji. Komputer wysyġajḟcy moṡe zapytaæ przez nadawanie UDP, na przykġad, je¶li jakikolwiek inny komputer ma okre¶lone informacje. Komputery, które chcḟ odpowiedzieæ, mogḟ ustanowiæ poġḟczenie TCP w celu udzielenia odpowiedzi prywatnie Jedynym ograniczeniem emisji jest to, ṡe ma tendencjê do zatrzymywania siê na granicach sieci LAN. Transmisja danych nie moṡe byæ dozwolona w Internecie, poniewaṡ spowodowaġaby zalanie systemu. Transmisje UDP muszḟ byæ przechowywane w sieci LAN innej niṡ UDP. Transmisje do wielu lokalizacji w Internecie sḟ czêsto konfigurowane w serwerze przy uṡyciu wielu poġḟczeñ punkt-punkt i równoczesnych transmisji tych samych danych. Uwaṡaj na kilka rzeczy podczas korzystania z komunikacji UDP. Przede wszystkim dane nie bêdḟ wolne od bġêdów. Po drugie, pakiety mogḟ nie dotrzeæ nawet we wġa¶ciwej kolejno¶ci. TCP dba o takie rzeczy. W komunikacji UDP, je¶li takie rzeczy sḟ waṡne, muszḟ byæ zaġatwiane w oprogramowaniu napisanym dla robota. Okej, byġe¶ tak cierpliwy, uczḟc siê technik komunikacyjnych, ṡe zasġugujesz na nagrodê lub dwie za osiḟgniêcie tak daleko.