Sģownik Robotyki
ACOUSTIC PROXIMITY SENSOR [CZUJNIK ZBLIŊENIOWY AKUSTYCZNY]
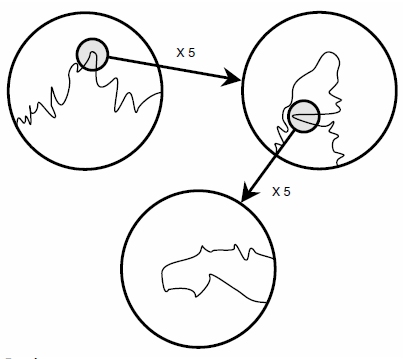
Akustyczny czujnik zbliŋeniowy moŋe byæ wykorzystywany przez robota do wykrywania obecnoķci i okreķlania odlegģoķci od obiektu lub bariery z bliskiej odlegģoķci. Dziaģa w oparciu o interferencję fali akustycznej. Zasada jest podobna do sonaru; ale zamiast mierzyæ opóžnienie czasowe między transmisją impulsu a jego echem, system analizuje zaleŋnoķæ fazową między falą transmitowaną a falą odbitą. Gdy sygnaģ akustyczny o jednej, dobrze okreķlonej, staģej częstotliwoķci (a zatem pojedynczej, dobrze okreķlonej, staģej dģugoķci fali) odbija się od obiektu w pobliŋu, fala odbita ģączy się z falą padającą, tworząc naprzemienne strefy, w których energia akustyczna dodaje i anuluje w fazie. Jeķli zarówno robot, jak i obiekt są nieruchome, strefy te pozostają nieruchome. Z tego powodu strefy nazywane są falami stojącymi. Jeķli robot porusza się względem obiektu, fale stojące zmieniają poģoŋenie. Nawet niewielkie przesunięcie względnego poģoŋenia robota i wykrywanego obiektu moŋe spowodowaæ znaczną zmianę we wzorcu fal stojących. Efekt ten staje się bardziej wyražny wraz ze wzrostem częstotliwoķci fali akustycznej, poniewaŋ dģugoķæ fali jest odwrotnie proporcjonalna do częstotliwoķci. Charakterystyka i skutecznoķæ akustycznego czujnika zbliŋeniowego zaleŋy od tego, jak dobrze obiekt lub bariera odbija fale akustyczne. Solidna betonowa ķciana jest ģatwiejsza do wykrycia niŋ sofa obita materiaģem. Odlegģoķæ między robotem a przeszkodą jest czynnikiem; ogólnie rzecz biorąc, akustyczny czujnik zbliŋeniowy dziaģa lepiej, gdy odlegģoķæ maleje, a gorzej wraz ze wzrostem odlegģoķci. Waŋna jest równieŋ iloķæ haģasu akustycznego w ķrodowisku roboczym robota. Im wyŋszy poziom haģasu, tym bardziej ograniczony jest zakres dziaģania czujnika i tym bardziej prawdopodobne są bģędy lub faģszywe alarmy. Fale ultradžwiękowe zapewniają wyjątkową dokģadnoķæ z bliskiej odlegģoķci, w niektórych przypadkach mniejszej niŋ 1 cm. Sģyszalny džwięk moŋe umoŋliwiæ dziaģanie systemu w odlegģoķciach rzędu kilku metrów. Jednak sygnaģy džwiękowe mogą denerwowaæ osoby, które muszą pracowaæ w pobliŋu maszyny.
AKTYWNY MECHANIZM AKORDOWY (ACM)
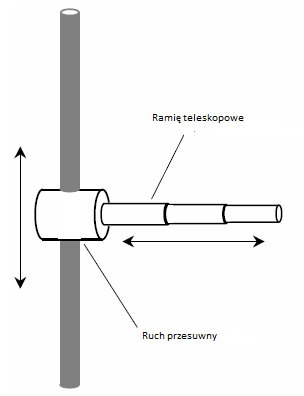
Aktywny mechanizm akordowy (ACM) to chwytak robota, który dostosowuje się do ksztaģtów nieregularnych obiektów. ACM jest zbudowany jak ludzki kręgosģup. Typowy ACM skģada się z wielu maģych, sztywnych konstrukcji poģączonych zawiasami, jak pokazano na ilustracji.
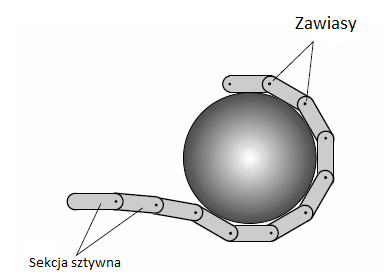
Dokģadnoķæ, z jaką ACM moŋe dostosowaæ się do nieregularnego obiektu, zaleŋy od wielkoķci i liczby sekcji. Im mniejsze sekcje, tym większa precyzja. ACM wywiera równomierny nacisk na caģej swojej dģugoķci. Ciķnienie to moŋna zwiększyæ lub zmniejszyæ, zgodnie z wymaganym zadaniem. Jednym z zastosowaņ ACM jest ustawianie lub ukģadanie delikatnych obiektów bez ich uszkadzania. Inną aplikacją jest zbieranie owoców i warzyw.
ACTUATOR [SIĢOWNIK]
Element wykonawczy jest urządzeniem, które porusza jednym lub większą liczbą poģączeņ i obsģuguje chwytak lub efektor koņcowy w ramieniu robota. Proste siģowniki skģadają się z silników elektrycznych i przekģadni, napędów kablowych lub napędów ģaņcuchowych. Bardziej zaawansowane siģowniki wymagają uŋycia hydrauliki, pneumatyki lub interakcji magnetycznych. Silniki krokowe są powszechnie stosowane jako roboty. Niektóre ramiona robota mogą dziaģaæ z jednym siģownikiem; inne wymagają dwóch lub więcej. Liczba siģowników potrzebnych do wykonania danego zadania zaleŋy od liczby stopni swobody, liczby stopni obrotu i wspóģrzędnej geometrii ramienia robota.
ADAPTIVE SUSPENSION VEHICLE [POJAZD Z ADAPTACYJNYM ZAWIESZENIEM] (ASV)
Pojazd z adaptacyjnym zawieszeniem (ASV) to wyspecjalizowany robot, który napędza się mechanicznymi koņczynami. Porusza się na kilku nogach jak gigantyczny owad. Zapewnia to doskonaģą stabilnoķæ i zwrotnoķæ. ASV moŋe przenosiæ kilkaset kilogramów i porusza się z prędkoķcią 2 do 4 m / s. Sama maszyna ma masę od 2 do 3 ton metrycznych. Ma wielkoķæ maģej cięŋarówki i moŋe przewoziæ kierowcę lub kierowcę. Konstrukcja i konstrukcja robota z nogami jest znacznie trudniejsza niŋ robota napędzanego na koģach lub na gąsienicach, ale przynosi to korzyķæ: ASV moŋe poruszaæ się na znacznie trudniejszym terenie niŋ jakikolwiek pojazd z koģami lub napędem gąsienicowym.
ADHESION GRIPPER [CHWYTAK PRZYCZEPNOĶCI]
Chwytak przyczepnoķci to efektor koņcowy robota, który chwyta przedmioty dosģownie się do nich przyczepiając. W najbardziej prymitywnej formie chwytak ten skģada się z pręta, kuli lub innego staģego obiektu pokrytego dwustronną taķmą. Rzep moŋna równieŋ zastosowaæ, jeķli chwytane przedmioty są równieŋ wyposaŋone. Gģówną zaletą chwytaka kleju jest to, ŋe jest prosty. Dopóki klej zachowuje swoją "lepkoķæ", będzie dziaģaģ bez konserwacji. Istnieją jednak pewne ograniczenia. Najwaŋniejszy jest fakt, ŋe kleju nie moŋna ģatwo wyģączyæ w celu zwolnienia uchwytu na obiekcie. Naleŋy zastosowaæ inne ķrodki, takie jak urządzenia blokujące chwytany obiekt na miejscu.
ALGORYTM
Algorytm to precyzyjna, krok po kroku procedura, dzięki której moŋna znaležæ rozwiązanie problemu. Algorytmy moŋna zazwyczaj przedstawiæ w formie schematu blokowego. Wszystkie programy komputerowe są algorytmami. Roboty wykonują okreķlone zadania, postępując zgodnie z algorytmami, które mówią im dokģadnie, gdzie i kiedy się przenieķæ. W wydajnym algorytmie kaŋdy krok jest niezbędny, nawet jeķli wydaje się, ŋe jest boczny lub cofa się. Algorytm musi zawieraæ skoņczoną liczbę kroków. Kaŋdy krok musi byæ wyraŋalny cyfrowo, aby komputer mógģ go wykonaæ. Chociaŋ algorytm moŋe zawieraæ wielokrotnie powtarzane pętle, caģy proces musi byæ wykonywalny w skoņczonym czasie. Chociaŋ ŋaden algorytm nie jest nieskoņczenie zģoŋony, istnieją takie, które wymagaģyby milionów lat, aby byģy wykonywane przez czģowieka, ale mogą byæ wykonane przez komputer w kilka sekund.
ALL-TRANSLATIONAL SYSTEM
Ukģad all-translation to schemat, w którym osie wspóģrzędnych pozostają staģe lub staģe w absolutnym sensie, gdy robot się porusza. Typowym przykģadem jest ukģad w trójwymiarowej (3-D) kartezjaņskiej geometrii wspóģrzędnych, w której osie są zdefiniowane jako póģnoc / poģudnie, wschód / zachód i góra / dóģ. System all-translacyjny w danym ķrodowisku niekoniecznie stanowi system all-translacyjny w innym ķrodowisku. Rozwaŋmy ukģad kartezjaņski, w którym oķ x jest póģnoc / poģudnie, oķ y jest wschód / zachód, a oķ z jest góra / dóģ. Jest to w peģni translacyjne, zgodnie z definicją i w odniesieniu do maģego regionu na Ziemi. Jednak ten schemat traci absolutnoķæ w odniesieniu do caģej planety lub większego Wszechķwiata, poniewaŋ Ziemia jest obracającą się kulą, a nie staģą pģaszczyzną euklidesową. W przypadku braku zestawu obiektów fizycznych do odniesienia, system all-translacyjny moŋe byæ utrzymany za pomocą ķrodków bezwģadnoķciowych. Ŋyroskop jest najczęstszym sposobem osiągnięcia tego.
ALTERNATYWNA TECHNOLOGIA KOMPUTEROWA
Badacze sztucznej inteligencji (AI) od lat debatują, czy moŋliwe jest zbudowanie maszyny o inteligencji porównywalnej z inteligencją czģowieka. Niektórzy naukowcy uwaŋają, ŋe alternatywna technologia komputerowa moŋe stanowiæ ķcieŋkę poszukiwania sztucznej inteligencji na poziomie ludzkim.
Procesy cyfrowe
Komputery osobiste korzystają z cyfrowej technologii komputerowej. Język operacyjny, znany jako język maszynowy, skģada się tylko z dwóch moŋliwych stanów, cyfr 1 i 0, reprezentowanych przez wysokie i niskie napięcie elektroniczne. Bez względu na to, jak zģoŋona jest funkcja, grafika lub program, dziaģania komputera cyfrowego zawsze moŋna podzieliæ na te dwa stany logiczne. Komputery cyfrowe mogą byæ szybkie i wydajne. Mogą pracowaæ z ogromną iloķcią danych, przetwarzając je z milionami cyfr na sekundę. Istnieją jednak pewne rzeczy, w których komputery cyfrowe nie są dobre. Niektórzy badacze uwaŋają, ŋe inne podejķcia do informatyki zasģugują na uwagę, mimo ŋe jak dotąd technologia cyfrowa odnosi sukcesy.
Procesy analogowe
Podczas gdy maszyna cyfrowa rozkģada wszystko na dyskretne bity (cyfry binarne), analogowa technologia komputerowa stosuje zupeģnie inne podejķcie. Pomyķl o pierwiastku kwadratowym z 2. Nie moŋna tego przedstawiæ jako stosunek liczb caģkowitych. Komputer cyfrowy to obliczy i uzyska wartoķæ okoģo 1,414, jednak reprezentacja liczby dziesiętnej pierwiastka kwadratowego z 2 nigdy nie moŋe byæ dokģadna. Najlepsze, co moŋe zrobiæ maszyna cyfrowa, to zbliŋyæ się do jej prawdziwej wartoķci. Pierwiastek kwadratowy z 2 to dģugoķæ przekątnej kwadratu mierząca 1 jednostkę z boku. Moŋesz go zbudowaæ za pomocą narzędzi klasycznej geometrii (sztuka analogowa) i uzyskaæ dokģadne odwzorowanie. Ale nie moŋesz tego uŋyæ w arytmetyce, poniewaŋ uŋywasz wartoķci liczbowej 1.414. W ten sposób poķwięcasz uŋytecznoķæ iloķciową dla doskonaģoķci jakoķciowej. Byæ moŋe podobne dawanie i przyjmowanie okaŋe się konieczne w dąŋeniu do opracowania komputera, który będzie przypominaģ czģowieka. Koncepcje analogowe zostaģy dostosowane do projektowania komputerów; w rzeczywistoķci byģa to jedna z pierwszych metod obliczeniowych. W ostatnich latach zostaģ w duŋej mierze zignorowany.
Optyka
Ķwiatģo widzialne, podczerwieņ (IR) i ultrafiolet (UV) oferują interesujące moŋliwoķci dla przyszģoķci technologii komputerowej. Na CD-ROM (dysk kompaktowy, pamięæ tylko do odczytu) stosuje się technologię optyczną w celu zwiększenia iloķci danych, które mogą byæ przechowywane w danej przestrzeni fizycznej. Maģe wgģębienia na plastikowej dyskietce powodują odbijanie lub pochģanianie wiązki laserowej na powierzchni. Umoŋliwia to kodowanie wielu megabajtów danych na dyskietce o ķrednicy mniejszej niŋ 15 cm. Dane mogą byæ przesyģane z ekstremalnymi prędkoķciami i wieloma kanaģami za pomocą laserów we wģóknach szklanych. Jest to znane jako ķwiatģowodowa transmisja danych i jest obecnie stosowane w niektórych systemach telefonicznych. Przewody w komputerach mogą kiedyķ zostaæ zastąpione ķwiatģowodami. Cyfrowe stany logiczne, reprezentowane obecnie przez impulsy elektryczne lub pola magnetyczne, byģyby reprezentowane przez przepuszczalnoķæ ķwiatģa. Niektóre materiaģy bardzo szybko zmieniają swoje wģaķciwoķci optyczne i mogą utrzymywaæ dany stan przez dģugi czas.
Dane atomowe
W miarę postępu technologii ukģadów scalonych coraz więcej cyfrowych bramek logicznych zostaģo upakowanych w coraz mniejszej przestrzeni fizycznej. Ponadto dzięki udoskonaleniom noķników magnetycznych roķnie pojemnoķæ dysków twardych i dyskietek. Wedģug konwencjonalnej nauki najmniejszą moŋliwą jednostką do przechowywania danych jest pojedynczy atom lub cząsteczka subatomowa. Rozwaŋ dyskietkę magnetyczną. Logika 1 moŋe byæ reprezentowana przez atom "prawą stroną do góry", z magnetycznym biegunem póģnocnym skierowanym w górę, a magnetyczny biegun poģudniowy skierowanym w dóģ. Wtedy logika 0 byģaby reprezentowana przez ten sam atom "do góry nogami" z bieguny magnetyczne odwrócone. Inną moŋliwoķcią jest pamięæ jednoelektronowa (SEM). Przykģadem SEM jest substancja, w której obecnoķæ nadmiaru elektronu w atomie reprezentuje logikę 1, a elektrycznie obojętny stan atomu reprezentuje logikę 0. Niektórzy naukowcy sądzą, ŋe chipy komputerowe mogą kiedyķ byæ uprawiane w laboratorium, w sposób podobny do kultury eksperymentalnej bakterie i wirusy są hodowane. Dla takiego urządzenia powstaģa nawet nazwa: biochip.
Nanotechnologia
W miarę jak ukģady scalone stają się coraz bardziej upakowane w maģe pakiety, moc komputera roķnie. Ale staje się równieŋ moŋliwe tworzenie coraz mniejszych komputerów. Dzięki molekularnej technologii komputerowej - budowie ukģadów scalonych cząsteczka po cząsteczce zamiast wytrawiania materiaģu z dala od ukģadu scalonego - moŋe byæ moŋliwe zbudowanie komputerów tak maģych, ŋe będą mogģy krąŋyæ w ludzkim ciele. Wyobraž sobie roboty z przeciwciaģami, kontrolowane przez centralny komputer, które są tak maģe jak bakterie. Zaģóŋmy, ŋe komputer centralny jest zaprogramowany do niszczenia niektórych organizmów chorobotwórczych. Taka maszyna byģaby czymķ w rodzaju sztucznej biaģej krwinki. Nanotechnologia to dziedzina badaņ poķwięcona rozwojowi i programowaniu maszyn mikroskopowych. Przedrostek nano- oznacza jedną miliardową (10-9 lub 0,000000001). Oznacza to równieŋ "wyjątkowo maģy". Skomputeryzowane nanoroboty mogą montowaæ większe komputery, oszczędzając ludziom wiele pracy związanej obecnie z produkcją maszyn. Nanotechnologia umoŋliwiģa juŋ noszenie komputera na nadgarstku, a nawet komputera osadzonego gdzieķ w ciele.
Sieci neuronowe
Technologia sieci neuronowej wykorzystuje filozofię projektowania, która róŋni się radykalnie od tradycyjnych komputerów cyfrowych. Sieci neuronowe są dobre w wykrywaniu wzorców, co jest waŋne przy prognozowaniu. Zamiast pracowaæ z dyskretnymi cyframi binarnymi, sieci neuronowe pracują z relacjami między zdarzeniami. O ile nie wystąpi awaria, cyfrowa maszyna wykonuje precyzyjne operacje na danych. To wymaga czasu, ale wynik jest zawsze taki sam, jeķli dane wejķciowe pozostają staģe. Nie dotyczy to sieci neuronowej. Sieæ neuronowa moŋe dziaģaæ szybciej niŋ maszyna cyfrowa. Aby osiągnąæ szybkoķæ, poķwięca się precyzję. Sieci neuronowe mogą uczyæ się na swoich bģędach. Wedģug niektórych naukowców technologia ta stanowi odwrócenie uwagi i odwrócenie uwagi od sprawdzonego gģównego nurtu; wedģug innych naukowców jest to bardzo obiecujące.
AMUSEMENT ROBOT [ZABAWNY ROBOT]
Robot rozrywkowy to robot hobby przeznaczony do rozrywki lub hazardu. Czasami firmy uŋywają ich do prezentowania nowych produktów i przyciągania klientów. Są powszechne na targach, szczególnie w Japonii. Mimo ŋe są zwykle maģe, często mają wyrafinowane kontrolery. Przykģadem robota rozrywkowego jest mysz mechaniczna (nie myliæ z urządzeniem wskazującym komputera), która porusza się po labiryncie. Najprostsze takie urządzenie zderza się losowo, dopóki nie znajdzie się przez przypadek. Bardziej wyrafinowana mysz robotyczna porusza się wzdģuŋ jednej ķciany labiryntu, aŋ się pojawi. Ta technika będzie dziaģaæ z większoķcią labiryntów, ale nie ze wszystkimi. Najbardziej zaawansowane roboty rozrywkowe to androidy lub maszyny z ludzkim wyglądem. Roboty tego typu mogą witaæ klientów w sklepach, obsģugiwaæ windy lub demonstrowaæ produkty na konwencjach. Niektóre roboty rozrywkowe mogą pomieķciæ ludzkich ježdžców.
ANALOGOWY RUCH
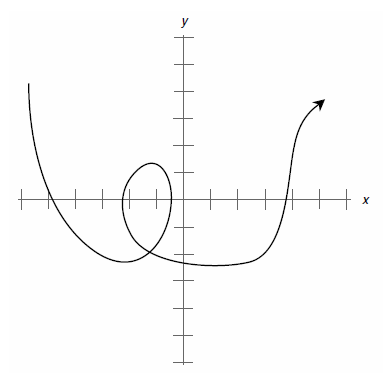
Termin ruch analogiczny odnosi się do zmiennej lub wielkoķci, która moŋe mieæ nieskoņczoną liczbę wartoķci w pewnym zakresie. Jest to w przeciwieņstwie do zmiennych cyfrowych lub wielkoķci, które mogą mieæ tylko skoņczoną liczbę wartoķci dyskretnych w danym zakresie. Zatem analogiczne sterowanie jest reprezentatywne dla tak zwanego ruchu pģynnego lub ciągģego. Osoba poruszająca się swobodnie po pokoju, zmieniająca pozycję w dowolnym punkcie w okreķlonym regionie ma zdolnoķæ ruchu analogicznego. Ludzkie ramię moŋe przemieszczaæ się w nieskoņczoną liczbę pozycji w pģynny i ciągģy sposób, w pewnym obszarze przestrzeni. To takŋe jest ruch analogowy. Wiele robotów moŋe jednak przemieszczaæ się tylko do niektórych punktów wzdģuŋ linii, na pģaszczyžnie lub w kosmosie. Ten ruch jest cyfrowy. Niektóre roboty mogą poruszaæ się w analogiczny sposób, ale niezbędny sprzęt jest na ogóģ bardziej skomplikowany niŋ w przypadku ruchu cyfrowego.
ANALITYCZNY SILNIK
Silnik analityczny byģ prymitywną maszyną obliczeniową zaprojektowaną przez Charlesa Babbage′a w XIX wieku. Babbage nigdy nie ukoņczyģ zadania zbudowania tego urządzenia do perfekcji, ale pomysģ polegaģ na wykorzystaniu kart dziurkowanych do wykonywania i drukowania obliczeņ w sposób podobny do pierwszych komputerów cyfrowych. Babbage jest uwaŋany za pierwszego inŋyniera pracującego nad prawdziwym cyfrowym kalkulatorem. Jednym z gģównych problemów Babbage byģo to, ŋe prąd nie byģ dostępny. Maszyny musiaģy uŋywaæ wyģącznie częķci mechanicznych. Zuŋywaģy się one przy częstym, powtarzalnym uŋywaniu. Innym problemem byģo to, ŋe Babbage lubiģ caģkowicie demontowaæ rzeczy, aby zacząæ od nowa od nowych projektów, zamiast oszczędzaæ swoje stare maszyny, aby mieæ na uwadze swoje niedociągnięcia przy projektowaniu nowych. Podczas fazy badawczo-rozwojowej silnika analitycznego niektórzy sądzili, ŋe odkryto sztuczną inteligencję (AI). Hrabina Lovelace posunęģa się nawet do napisania programu dla maszyny. Maszyna Babbage′a stanowiģa punkt zwrotny w ludzkich postawach wobec maszyn. Ludzie zaczęli wierzyæ, ŋe "inteligentne maszyny" byģy nie tylko moŋliwe w teorii, ale takŋe praktyczne.
ANDROID
Android to robot o ludzkiej postaci. Typowy android ma obrotową gģowicę wyposaŋoną w czujniki poģoŋenia. Widzenie maszynowe obuoczne pozwala androidowi dostrzec gģębię, tym samym lokalizując obiekty w dowolnym miejscu w duŋym pomieszczeniu. Moŋna równieŋ wģączyæ rozpoznawanie mowy i syntezę mowy. Ze względu na swój quasi-ludzki wygląd, androidy są szczególnie odpowiednie do stosowania tam, gdzie są dzieci. Istnieją pewne problemy mechaniczne przy projektowaniu robotów humanoidalnych. Dwunoŋne roboty są niestabilne. Nawet trójnoŋne konstrukcje, choæ bardziej stabilne, są dwunoŋne, gdy jedna z nóg znajduje się nad ziemią. Ludzie mają wrodzone poczucie równowagi, ale tę funkcję trudno zaprogramowaæ w maszynie. W ten sposób android zwykle napędza się napędem koģowym lub gąsienicowym w podstawie. Windy mogą byæ uŋywane, aby ruchomy android mógģ dostaæ się z podģogi na podģogę w budynku. Istnieje technologia dla w peģni funkcjonalnych ramion, ale programowanie potrzebne do ich dziaģania nie zostaģo jeszcze opģacone dla maģych robotów. Nie opracowano jeszcze Androida, nawet na najmodniejszych deskach kreķlarskich, które moŋna by pomyliæ z osobą, jak pokazano w ksiąŋkach science fiction i filmach. Roboty humanoidalne cieszą się popularnoķcią, szczególnie w Japonii. Jeden z najsģynniejszy nazywaģ się Wasubot. Graģ na organach z finezją profesjonalnego muzyka. Ten robot staģ się idolem na japoņskim show Expo 85. Demonstracja pokazaģa, ŋe maszyny mogą byæ atrakcyjne zarówno pod względem estetycznym, jak i funkcjonalnym.
ANIMIZM
Ludzie w niektórych krajach, zwģaszcza w Japonii, wierzą, ŋe siģa ŋycia istnieje w takich rzeczach, jak kamienie, jeziora i chmury, a takŋe w ludziach, zwierzętach i roķlinach. To przekonanie nazywa się animizmem. Juŋ w poģowie dziewiętnastego wieku wymyķlono maszynę, która miaģa byæ w pewnym sensie oŋywiona. To byģ silnik analityczny Charlesa Babbage′a. W tamtym czasie bardzo niewiele osób powaŋnie myķlaģo, ŋe urządzenie wykonane z kóģ i kóģ zębatych moŋe mieæ ŋycie, jednak dzisiejsze ogromne komputery i obietnica budowania coraz bardziej wyrafinowanych komputerów co roku wyprowadziģy to pytanie ze ķwiata science fiction . Komputery mogą robiæ rzeczy, których ludzie nie potrafią. Na przykģad nawet prosty komputer osobisty (PC) moŋe ustaliæ wartoķæ π (pi), stosunek obwodu koģa do jego ķrednicy, do milionów miejsc po przecinku. Roboty moŋna zaprogramowaæ do robienia rzeczy tak skomplikowanych, jak wymyķlanie, jak przedostaæ się przez labirynt lub uratowaæ osobę z pģonącego budynku. W ostatnich latach programowanie osiągnęģo taki stopieņ, ŋe komputery mogą uczyæ się na swoich bģędach, dzięki czemu nie popeģniają ŋadnego konkretnego bģędu więcej niŋ raz. Jest to jedno z kryteriów inteligencji, ale niewielu zachodnich inŋynierów lub naukowców uwaŋa to samo za cechę charakterystyczną ŋycia.
ANTROPOMORFIZM
Czasami maszyny lub inne przedmioty mają cechy, które wydają się nam podobne do ludzkich. Dotyczy to szczególnie zaawansowanych komputerów i robotów. Popeģniamy antropomorfizm, gdy myķlimy o komputerze lub robocie jak o czģowieku. Na przykģad androidy są ģatwe do antropomorfizacji. Filmy i powieķci science fiction często wykorzystują antropomorfizmy. Przykģad antropomorfizmu w odniesieniu do komputera występuje w powieķci i filmie 2001: A Space Odyssey. W tej historii statek kosmiczny jest kontrolowany przez "Hala", komputer, który popada w urojenia i próbuje zabiæ ludzkich astronautów. Niektórzy inŋynierowie uwaŋają, ŋe wyrafinowane roboty i komputery mają juŋ ludzkie cechy, poniewaŋ mogą optymalizowaæ problemy i / lub uczyæ się na bģędach. Inni jednak twierdzą, ŋe kryteria ŋycia są znacznie bardziej rygorystyczne. Wģaķciciele robotów osobistych czasami myķlą o maszynach jako o towarzyszach. W tym sensie takie roboty faktycznie są jak ludzie, poniewaŋ moŋna ich polubiæ.
ARTICULATED GEOMETRY [GEOMETRIA PRZEGUBOWA]
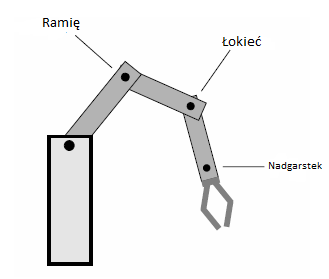
Ramiona robota mogą się poruszaæ na róŋne sposoby. Niektóre mogą osiągnąæ tylko pewne dyskretne lub okreķlone pozycje i nie mogą zatrzymaæ się na ŋadnej pozycji poķredniej. Inni mogą poruszaæ się pģynnymi, zamiatającymi ruchami i są w stanie dotrzeæ do dowolnego punktu w okreķlonym regionie. Jedną z metod ruchu ramienia robota jest geometria przegubowa. Sģowo "przegubowe" oznacza "podzielone na sekcje przez stawy". Ten typ ramienia robota przypomina ramię czģowieka. Wszechstronnoķæ jest zdefiniowana w kategoriach liczby stopni swobody. Moŋe istnieæ na przykģad obrót podstawy, wysokoķæ i zasięg. Istnieje kilka róŋnych geometrii przegubowych dla dowolnej liczby stopni swobody. Ilustracja pokazuje jeden schemat ramienia robota, który wykorzystuje geometrię przegubową.
ARTIFICIAL INTELLIGENCE [SZTUCZNA INTELIGENCJA]
Definicja tego, co stanowi sztuczną inteligencję (AI) jest róŋna wķród inŋynierów. Nie ma powszechnie akceptowanej umowy dotyczącej jej dokģadnego znaczenia. Programowanie robotów moŋna podzieliæ na poziomy, zaczynając od najmniej skomplikowanego i przechodząc do teoretycznego, raczej mglistego poziomu AI. Rysunek przedstawia czteropoziomowy schemat programowania
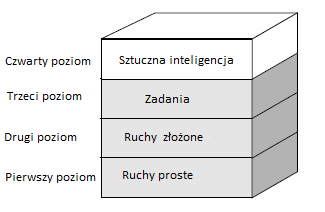
Sztuczna inteligencja na najwyŋszym poziomie obejmuje wģaķciwoķci, zachowania i zadania oraz obejmuje roboty z funkcjami takimi jak:
• Poczuj zmienne fizyczne, takie jak ķwiatģo i džwięk
• Generuj obrazy w wysokiej rozdzielczoķci (system wizyjny)
• Opracuj koncepcję rzeczywistoķci (model ķwiata)
• Okreķl optymalny lub najskuteczniejszy sposób dziaģania
• Ucz się na bģędach z przeszģoķci
• Utwórz plan w danej sytuacji, a następnie postępuj zgodnie z nim
• Zmodyfikuj plan w miarę zmian zachodzących w ķrodowisku
• Kontynuuj dwustronne rozmowy z ludžmi lub innymi maszynami
• Wnioskuj rozwiązania na podstawie ograniczonych lub niepeģnych informacji
• Opracuj nowe sposoby rozwiązywania starych problemów
• Przeszukaj bazę wiedzy pod kątem konkretnych faktów lub rozwiązaņ
• Zaprogramuj się
• Popraw swoje wģasne projekty
Sztuczna inteligencja jest trudna do oszacowania; najbardziej kuszącym standardem jest porównanie "inteligencji maszynowej" z inteligencją ludzką. Na przykģad inteligentnej maszynie moŋna poddaæ test ilorazowi inteligencji (IQ) podobny do testów zaprojektowanych do pomiaru inteligencji ludzkiej. W tej interpretacji poziom AI wzrasta, gdy robot lub komputer staje się bardziej "ludzki" w swoich reakcjach na otaczający ķwiat. Kolejny schemat obejmuje korzystanie z gier wymagających strategii wybiegającej w przyszģoķæ, takich jak warcaby lub szachy.
ARTIFICIAL STIMULUS [SZTUCZNY BODZIEC]
Sztuczny bodziec to metoda prowadzenia robota po okreķlonej ķcieŋce. Na przykģad zautomatyzowany pojazd kierowany (AGV) wykorzystuje pole magnetyczne do podąŋania pewnymi trasami w swoim otoczeniu. Róŋne punkty orientacyjne moŋna wykorzystaæ jako sztuczne bodžce. Nie ma potrzeby osadzania przewodów lub magnesów w podģodze, jak ma to miejsce w przypadku AGV. Robota moŋna zaprogramowaæ tak, aby podąŋaģ za ķcianą po prawej (lub lewej) stronie, aŋ dotrze do miejsca docelowego, na przykģad w celu znalezienia wyjķcia z labiryntu. Za lampami w suficie korytarza mogą znajdowaæ się czujniki ķwiatģa i kierunku. Po krawędzi jezdni moŋna wizualnie sprawdziæ róŋnicę jasnoķci między nawierzchnią drogi a poboczem. Innym sposobem zapewnienia wskazówek jest uŋycie lampy ostrzegawczej. Moŋe to byæ wiązka podczerwieni (IR) lub widzialna lub zestaw žródeģ ultradžwięków. Za pomocą ultradžwięków robot moŋe zmierzyæ róŋnicę czasu propagacji z róŋnych žródeģ, aby znaležæ swoją pozycję na otwartej przestrzeni, jeķli nie ma ŋadnych przeszkód. Istnieje wiele sposobów oznaczania obiektów w celu ich identyfikacji. Jedną z metod jest kod kreskowy, który stosuje się do ustalania cen i identyfikacji produktów w sklepach detalicznych, a drugą jest pasywny transponder typu przymocowanego do towarów, aby zapobiec kradzieŋy w sklepie.
ASIMOVA : TRZY PRAWA
W jednym ze swoich wczesnych opowiadaņ science fiction pģodny pisarz Izaak Asimow po raz pierwszy wspomniaģ o sģowie "robotyka" wraz z trzema podstawowymi zasadami, których muszą przestrzegaæ wszystkie roboty. Zasady, zwane obecnie trzema prawami Asimova, są następujące.
• Robot nie moŋe zraniæ ani pozwoliæ na obraŋenia jakiejkolwiek istoty ludzkiej.
• Robot musi przestrzegaæ wszystkich rozkazów ludzi, z wyjątkiem rozkazów sprzecznych z Pierwszym Prawem.
• Robot musi się chroniæ, z wyjątkiem przypadków, gdy byģoby to sprzeczne z Pierwszym Prawem lub Drugim Prawem.
Chociaŋ reguģy te zostaģy po raz pierwszy ukute w latach 40. XX wieku, nadal są uwaŋane za dobre standardy zachowania robotycznego.
ASSEMBLY ROBOT [ROBOT MONTAŊOWY]
Robot montaŋowy to kaŋdy robot, który montuje produkty, takie jak samochody, sprzęt AGD lub sprzęt elektroniczny. Niektóre roboty montaŋowe dziaģają samodzielnie; większoķæ z nich jest wykorzystywana w zautomatyzowanych zintegrowanych systemach produkcyjnych (AIMS), wykonujących powtarzalną pracę z duŋą prędkoķcią i przez dģugi czas. Wiele robotów montaŋowych ma postaæ ramion robota. Rodzaj ustawienia poģączenia zaleŋy od zadania, które musi wykonaæ robot. Wspólne ustalenia są nazywane zgodnie z typem stosowanego ukģadu wspóģrzędnych. Zģoŋonoķæ ruchu w robocie montaŋowym wyraŋa się w kategoriach liczby stopni swobody. Aby prawidģowo wykonaæ swoją pracę, robot montaŋowy musi mieæ wszystkie częķci, z którymi wspóģpracuje, umieszczone dokģadnie w odpowiednich miejscach. Zapewnia to, ŋe robot moŋe z kolei podnieķæ kaŋdą częķæ w procesie montaŋu, przechodząc do wģaķciwego zestawu wspóģrzędnych. Tolerancja bģędu jest niewielka. W niektórych systemach montaŋowych róŋne komponenty są oznaczone etykietami identyfikacyjnymi, takimi jak kody kreskowe, aby robot mógģ znaležæ kaŋdą częķæ poprzez wyzerowanie na etykiecie.
ATTRACTION GRIPPER [CHWYTAK PRZYCIĄGAJĄCY]
Chwytak przyciągający to efektor koņcowy robota, który chwyta przedmioty za pomocą przyciągania elektrycznego lub magnetycznego. Zasadniczo stosuje się magnesy; sģuŋą temu magnesy trwaģe lub elektromagnesy. Elektromagnesy mają tę zaletę, ŋe moŋna je wģączaæ / wyģączaæ, dzięki czemu obiekt moŋna wygodnie zwolniæ bez koniecznoķci zabezpieczania go za pomocą zewnętrznych ķrodków. Odwrotnie, magnesy trwaģe mają tę zaletę, ŋe wymagają minimalnej konserwacji. Podobnie jak chwytak samoprzylepny, chwytak przyciągający jest zasadniczo prosty. Istnieją dwa podstawowe problemy z tego typu efektorem koņcowym. Po pierwsze, aby chwytak przyciągania magnetycznego dziaģaģ, chwytany przez niego przedmiot musi zawieraæ materiaģ ferromagnetyczny, taki jak ŋelazo lub stal. Po drugie, pole magnetyczne wytwarzane przez efektor koņcowy moŋe trwale namagnesowaæ obiekty, którymi się zajmuje. W niektórych przypadkach nie stanowi to problemu, ale w innych przypadkach moŋe powodowaæ problemy.
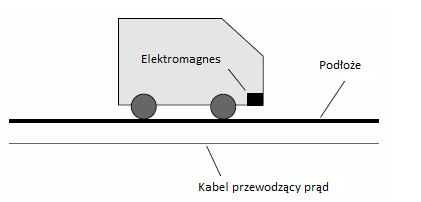
AUTOMATED GUIDED VEHICLE [ZAUTOMATYOWANY POJAZD KIEROWANY]
Zautomatyzowany pojazd kierowany (AGV) to wózek robota, który dziaģa bez kierowcy. Wózek ma silnik elektryczny i jest prowadzony przez pole magnetyczne wytwarzane przez drut na podģodze lub tuŋ pod podģogą (patrz ilustracja). Alternatywnie AGV moŋe dziaģaæ na zestawie szyn. W zautomatyzowanych systemach AGV są stosowane do doprowadzania komponentów do linii montaŋowych. AGV mogą równieŋ sģuŋyæ jako pomocnicy w szpitalach, przynosząc pacjentom ŋywnoķæ i inne nieistotne przedmioty, lub jako mechaniczni pracownicy wykonujący rutynowe obowiązki w domu lub biurze. Mówiono o przerabianiu samochodów na samochody AGV, które podąŋają za drutami osadzonymi w nawierzchni drogi. To zabraģoby częķæ pracy kierowcy, pozwalając komputerom sterowaæ pojazdem i regulowaæ jego prędkoķæ. Kaŋdy samochód miaģby wģasny komputer. W mieķcie ruch byģby nadzorowany przez jeden lub więcej komputerów centralnych. W przypadku awarii komputera caģy ruch zostanie zatrzymany. To praktycznie wyeliminowaģoby wypadki. To, czy spoģeczeņstwo zaakceptuje tego rodzaju system na ogólną skalę, dopiero się okaŋe.
AUTOMATYZACJA
Termin automatyzacja odnosi się do systemu, w którym niektóre lub wszystkie procesy są wykonywane przez maszyny, zwģaszcza roboty. Zasoby automatyzacji obejmują:
• Roboty dziaģają szybko.
• Roboty są precyzyjne.
• Roboty są niezawodne, jeķli są dobrze zaprojektowane i utrzymywane.
• Roboty są zdolne do ogromnej siģy fizycznej.
Przewagi ludzkich operatorów nad robotami obejmują następujące fakty:
• Ludzie mogą rozwiązaæ niektóre problemy, których nie potrafią maszyny.
• Ludzie mają większą tolerancję na zamieszanie i bģędy.
• Ludzie mogą wykonywaæ pewne zadania, których roboty nie mogą.
• Ludzie są potrzebni do nadzorowania systemów robotycznych.
AUTOMAT
Automat to prosty robot, który wykonuje zadanie lub zestaw zadaņ bez skomplikowanej kontroli komputera. Automaty istnieją juŋ od ponad 200 lat. Wczesnym przykģadem automatu byģa "mechaniczna kaczka" zaprojektowana przez J. de Vaucansona w XVIII wieku. Wykorzystano go do rozrywki odbiorców w Europie. Wydawaģo z siebie kwakanie i wydawaģo się, ŋe je i pije. Vaucanson uŋyģ robota, by zebraæ pieniądze na swoją pracę. Kaŋdego grudnia niektórzy ambitni ludzie budują na swoich podwórkach wystawy ķwiąteczne, skģadające się z maszyn w postaci ludzi i zwierząt. Maszyny te nie mają "mózgów", poniewaŋ po prostu stosują się do procedur mechanicznych. Chociaŋ obserwowanie ich jest przyjemne, urządzenia te nie są precyzyjne, a ruchy, które mogą wykonaæ, są ograniczone. Niektóre z tych maszyn mogą wyglądaæ na androidy, ale w rzeczywistoķci są niczym więcej niŋ ruchomymi posągami.
AUTONOMICZNY ROBOT
Autonomiczny robot jest samowystarczalny, ma wģasny kontroler i nie jest zaleŋny od komputera centralnego dla jego poleceņ. Porusza się w ķrodowisku pracy z wģasną mocą, zwykle tocząc się na koģach lub napędzie gąsienicowym. Autonomia robota moŋe początkowo wydawaæ się wielkim atutem: jeķli robot funkcjonuje sam w systemie, to gdy zawiodą inne częķci systemu, robot będzie dziaģaģ, jednak w systemach, w których stosuje się wiele identycznych robotów, autonomia jest nieefektywna . Z ekonomicznego punktu widzenia lepiej jest umieķciæ programy w jednym centralnym komputerze, który kontroluje wszystkie roboty. Roboty owadowe dziaģają w ten sposób. Proste roboty, takie jak te na liniach montaŋowych, nie są autonomiczne. Im bardziej zģoŋone zadanie i im więcej róŋnych rzeczy musi zrobiæ robot, tym większa moŋe mieæ autonomia. Najbardziej zaawansowane autonomiczne roboty mają sztuczną inteligencję (AI).
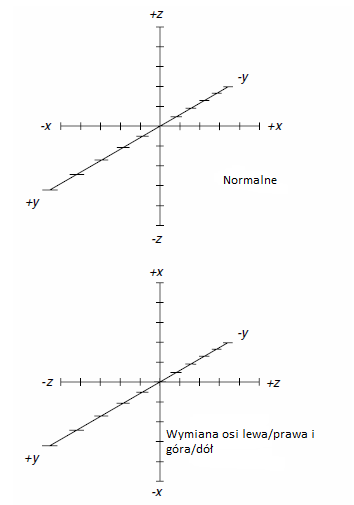
AXIS INTERCHANGE [WYMIANA OSI]
Wymiana osi to transpozycja osi wspóģrzędnych w zrobotyzowanym ukģadzie wykorzystującym geometrię kartezjaņską. Wymiana osi moŋe obejmowaæ dwie lub wszystkie trzy osie. Ilustracja pokazuje przykģad, w którym transponowane są osie lewa / prawa (zwykle x) i góra / dóģ (zwykle z). Nie jest to jedyny sposób, w jaki moŋe mieæ miejsce wymiana lewo / prawo kontra góra / dóģ; jedna lub obie osie mogą byæ równieŋ odwrócone. Oczywiķcie istnieje wiele moŋliwoķci wymiany osi w trójwymiarowym ukģadzie kartezjaņskim. Wymiana osi moŋe powodowaæ uŋyteczne zmiany ruchów robota. Schemat programowania pojedynczego ruchu moŋe skutkowaæ bardzo róŋnymi obwiedniami roboczymi i wzorami ruchu, w zaleŋnoķci od tego, jak zdefiniowane są osie. Niezaleŋnie od transpozycji osi, zawsze istnieje zgodnoķæ jeden-do-jednego pomiędzy punktami w obu koperty robocze, pod warunkiem, ŋe programowanie ruchu jest wykonane poprawnie. W zaleŋnoķci od rodzaju zastosowanego systemu robotycznego zamiana osi moŋe zmieniæ lub ograniczyæ obwiednię roboczą. Pewne punkty poģoŋenia lub pewne rodzaje ruchu, które są moŋliwe w jednym schemacie wspóģrzędnych, mogą byæ niemoŋliwe w drugim.
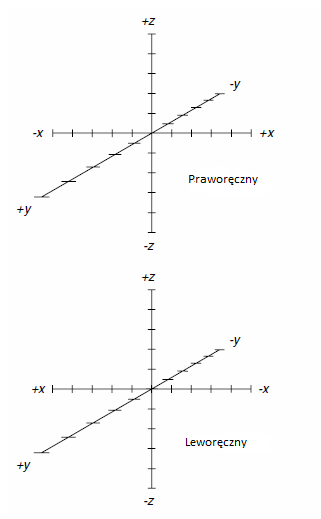
AXIS INVERSION [ODWRÓCENIE OSI]
Odwrócenie osi jest odwróceniem orientacji jednej lub więcej osi wspóģrzędnych w systemie robotycznym wykorzystującym geometrię kartezjaņską. Gdy ruchy robota są programowane przy uŋyciu schematu kartezjaņskiego (lub prostokątnego), róŋnica między operacjami praworęcznymi i leworęcznymi polega jedynie na odwróceniu lub odwróceniu wspóģrzędnych w jednej z osi. Zasadniczo lewą / prawą osią w schemacie kartezjaņskim jest oķ x. Odwrócenie wspóģrzędnych na tej osi jest formą inwersji pojedynczej osi. Ilustracja pokazuje dwie trójwymiarowe kartezjaņskie siatki wspóģrzędnych. W górnym przykģadzie przedstawiono schemat praworęczny. Dolny rysunek pokazuje leworęczny odpowiednik. Oznaczenia wspóģrzędnych są identyczne, z tym wyjątkiem, ŋe są odbiciami lustrzanymi w odniesieniu do osi x. Wszystkie dziaģy reprezentują tę samą odlegģoķæ jednostkową w obu przypadkach. Podczas gdy lewy i prawy są odwrócone w tym przykģadzie, zmysģy góra / dóģ i przód / tyģ pozostają takie same. W niektórych systemach konieczne jest odwrócenie dwóch, a nawet wszystkich trzech osi, aby uzyskaæ poŋądany ruch robota. Schematy te moŋna nazwaæ inwersją dwuosiową lub inwersją trzyosiową.
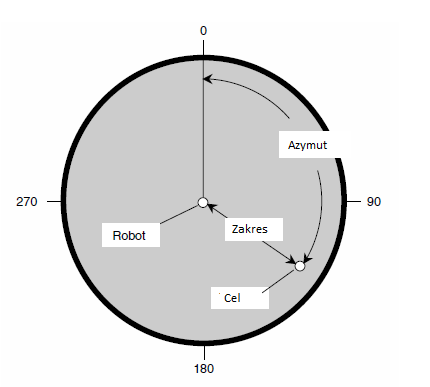
AZIMUTH-RANGE NAVIGATION [NAWIGACJA W ZAKRESIE AZYMUTU]
Fale elektromagnetyczne (EM) lub akustyczne odbijają się od róŋnych obiektów. Ustalając kierunki, z których przesyģane są sygnaģy EM lub akustyczne, oraz mierząc czas potrzebny impulsom na przemieszczenie się z poģoŋenia nadajnika do celu i z powrotem, robot moŋe zlokalizowaæ obiekty w swoim ķrodowisku pracy. Bieŋące zmiany informacji o azymucie (namiocie kompasu) i zasięgu (odlegģoķci) dla kaŋdego obiektu w ķrodowisku pracy mogą byæ wykorzystywane przez sterownik robota do nawigacji. Klasycznym systemem nawigacji w zakresie azymutu jest konwencjonalny radar, który skģada się z nadajnika, anteny kierunkowej, odbiornika i wyķwietlacza. Nadajnik wytwarza impulsy mikrofalowe EM, które są propagowane w wąskiej wiązce. Fale elektromagnetyczne uderzają w obiekty z róŋnych odlegģoķci. Im większa odlegģoķæ do celu, tym dģuŋsze jest opóžnienie przed otrzymaniem echa. Antena nadawcza jest obracana, dzięki czemu moŋna obserwowaæ wszystkie ģoŋyska azymutu. Podstawowa konfiguracja schematu zakresu azymutu jest pokazana na ilustracji. Robot znajduje się na ķrodku wyķwietlacza. Namiary azymutu są wskazane w stopniach zgodnie z ruchem wskazówek zegara od prawdziwej póģnocy i są zaznaczone na caģym obwodzie. Odlegģoķæ lub zasięg jest wskazywana przez przesunięcie promieniowe. Niektóre systemy zakresu azymutu mogą wykrywaæ zmiany częstotliwoķci zwracanych EM lub impulsów akustycznych wynikające z efektu Dopplera. Dane te są wykorzystywane do pomiaru prędkoķci zbliŋania się lub cofania obiektów. Sterownik robota moŋe korzystaæ z tych informacji, wraz z danymi pozycji zapewnianymi przez schemat zakresu azymutu, do nawigacji zģoŋonego ķrodowiska.
Powrót
BACK LIGHTING [TYLNE OĶWIETLENIE]
CABLE DRIVE [NAPĘD KABLOWY]
DANYCH KOMPRESJA
EDGE DETECTION [WYKRYWANIE KRAWĘDZI]
FAĢSZ NEGATYWNY LUB POZYTYWNY
GANTRY ROBOT
"HACKER" PROGRAM
IF / THEN / ELSE
JAW [SZCZĘKA]
KINEMATYCZNY BĢĄD
LADAR
MASZYNOWY JĘZYK
NANOCHIP
OBJECT-ORIENTED GRAPHICS [GRAFIKA ZORIENTOWANA OBIEKTOWO]
PALETYZACJA I DEPALETYZACJA
QUADRUPED ROBOT [CZWORONOŊNY ROBOT]
RADAR
SATELITARNA TRANSMISJA DANYCH
TACTILE SENSING [DOTYKOWE WYCZUWANIE]
UNCANNY VALLEY [TEORIA DOLINY NIESAMOWITOĶCI]
VACUUM CUP GRIPPER [CHWYTAK PRZYSSAWKOWY]
WELL-STRUCTURED LANGUAGE [DOBRZE ZORGANIZOWANY JĘZYK]
X OĶ
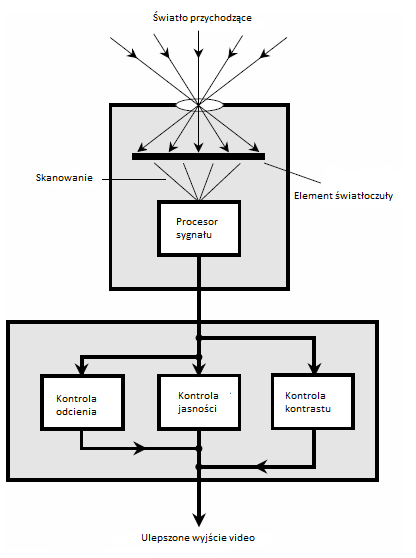
W zrobotyzowanym systemie wizyjnym podķwietlenie odnosi się do oķwietlenia obiektów w ķrodowisku pracy przy uŋyciu žródģa ķwiatģa zasadniczo zgodnego z obiektami, ale bardziej od niego oddalonego. Ķwiatģo ze žródģa nie odbija się zatem od powierzchni obserwowanych obiektów. Oķwietlenie tylne jest stosowane w sytuacjach, w których szczegóģy powierzchni obserwowanych obiektów nie są interesujące ani istotne dla robota, ale waŋny jest ksztaģt wyķwietlanego obrazu. Podķwietlenie jest równieŋ korzystne w niektórych sytuacjach z póģprzezroczystymi lub póģprzezroczystymi obiektami, których struktura wewnętrzna musi zostaæ przeanalizowana. Promienie ķwietlne przechodzące przez póģprzezroczysty lub póģprzezroczysty obiekt mogą ujawniæ szczegóģy, których nie potrafi oķwietlenie przednie lub boczne.
BACK PRESSURE SENSOR [CZUJNIK PREZCIWCIĶNIENIA]
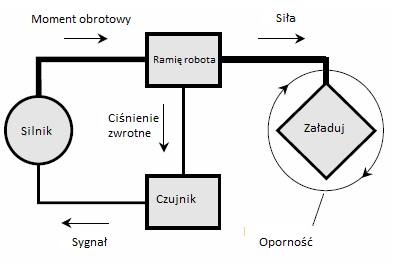
Czujnik przeciwciķnienia to urządzenie, które wykrywa i mierzy moment obrotowy, jaki przykģada silnik robota w danym momencie. Czujnik wytwarza sygnaģ, zwykle napięcie zmienne zwane napięciem wstecznym, które roķnie wraz ze wzrostem momentu obrotowego. Napięcie wsteczne sģuŋy jako ujemne sprzęŋenie zwrotne w celu ograniczenia momentu obrotowego przyģoŋonego przez silnik. Podczas pracy silnika robota napotyka on opór mechaniczny zwany przeciwciķnieniem. Opór ten zaleŋy od róŋnych czynników, takich jak cięŋar podnoszonego przedmiotu lub tarcie obiektu poruszającego się po powierzchni. Moment obrotowy jest bezpoķrednią funkcją odpornoķci mechanicznej. Wraz ze wzrostem momentu obrotowego roķnie równieŋ przeciwciķnienie, jakie napotyka silnik. I odwrotnie, wraz ze wzrostem przeciwciķnienia roķnie równieŋ moment obrotowy silnika niezbędny do uzyskania danego wyniku. Czujniki ciķnienia wstecznego i systemy sprzęŋenia zwrotnego sģuŋą do ograniczenia siģy przyģoŋonej przez chwytak robota, ramię, wiertarkę, mģotek lub
inne urządzenie. Moŋe to zapobiec uszkodzeniu przedmiotów obsģugiwanych przez robota. Pomaga takŋe zapewniæ bezpieczeņstwo osobom pracującym wokóģ robota. Towarzysząca ilustracja jest funkcjonalnym schematem blokowym dziaģania czujnika przeciwciķnienia i powiązanej pętli ujemnego sprzęŋenia zwrotnego, która reguluje przyģoŋony moment obrotowy.
BACKWARD CHAINING [WNIOSKOWANIE W TYĢ]
Wnioskowanie w tyģ to logiczny proces, który moŋna zastosowaæ w sztucznej inteligencji (AI). Zamiast pracowaæ z danymi, które zostaģy dostarczone z wyprzedzeniem, komputer ŋąda danych. W ten sposób komputer otrzymuje tylko informacje potrzebne do rozwiązania problemu. Nie marnuje się pamięci na przechowywanie niepotrzebnych danych. Wnioskowanie w tyģ jest szczególnie uŋyteczny w systemach eksperckich, które są programami zaprojektowanymi, aby pomóc w rozwiązywaniu specjalistycznych problemów w nieznanych dziedzinach. Dobrym przykģadem jest program diagnostyki medycznej. Ģączenie wsteczne moŋe byæ równieŋ przydatne w elektronicznym rozwiązywaniu problemów, prognozowaniu pogody, analizie kosztów, a nawet pracy detektywa policji.
BALISTYCZNA KONTROLA
Kontrola balistyczna jest formą zrobotyzowanego sterowania ruchem, w której ķcieŋka lub trajektoria urządzenia jest obliczana lub programowana caģkowicie wczeķniej. Po ustaleniu ķcieŋki nie są wprowadzane dalsze poprawki. Termin wywodzi się z podobieņstwa do obliczeņ balistycznych do celowania broni i pocisków. Gģównymi zaletami kontroli balistycznej są prostota i umiarkowane koszty. Zrobotyzowany manipulator z kontrolą balistyczną nie musi nosiæ czujników; robot mobilny z kontrolą balistyczną nie potrzebuje wģasnego urządzenia pokģadowego , komputera. Gģównym ograniczeniem jest fakt, ŋe kontrola balistyczna nie pozwala na szybkie, zlokalizowane lub nieoczekiwane zmiany w ķrodowisku pracy.
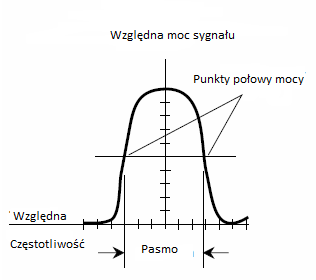
BANDWIDTH [PASMO]
Szerokoķæ pasma odnosi się do iloķci przestrzeni częstotliwoķci lub przestrzeni widma, której wymaga sygnaģ, aby byģ wyražnie przesyģany i odbierany. Szerokoķæ pasma jest ogólnie definiowana jako róŋnica częstotliwoķci między dwoma punktami poģowy mocy w nadawanym lub odbieranym sygnale danych, jak pokazano na ilustracji. Wszystkie sygnaģy mają skoņczoną, niezerową szerokoķæ pasma. Ŋaden sygnaģ nie moŋe byæ przesyģany w nieskoņczenie maģej szczelinie przestrzeni widmowej. Zasadniczo szerokoķæ pasma sygnaģu jest proporcjonalna do prędkoķci, z jaką dane są wysyģane i odbierane. W systemach cyfrowych prędkoķæ danych jest oznaczana w bitach na sekundę (bps), kilobitach na sekundę (kb / s), megabitów na sekundę (Mb / s) lub gigabitów na sekundę (Gb / s), gdzie
1 kbps = 1000 bps = 103 bps
1 Mbps = 1000 kbps = 106 bps
1 Gbps = 1000 Mbps = 109 bps
Wraz ze wzrostem dopuszczalnej przepustowoķci maksymalna prędkoķæ transmisji danych roķnie wprost proporcjonalnie. Poniewaŋ dozwolona szerokoķæ pasma jest ograniczona, maksymalna prędkoķæ danych spada wprost proporcjonalnie.
BAR CODING [KOD KRESKOWY]
Kod kreskowy to metoda znakowania obiektów. Etykiety z kodami kreskowymi lub znaczniki są szeroko stosowane w sklepach detalicznych do ustalania cen i identyfikacji towarów. Znacznik z kodem kreskowym ma charakterystyczny wygląd, z równolegģymi liniami o róŋnej szerokoķci i odstępach (patrz ilustracja). Urządzenie wyposaŋone w laser skanuje znacznik, pobierając dane identyfikacyjne. Urządzenie czytające nie musi byæ doprowadzane bezpoķrednio do znacznika; moŋe dziaģaæ z pewnej odlegģoķci.

Znaczniki z kodem kreskowym to jedna z metod oznaczania obiektów, aby robot mógģ je zidentyfikowaæ. To znacznie upraszcza proces rozpoznawania. Na przykģad kaŋdy element w zestawie narzędzi moŋna oznakowaæ przy uŋyciu naklejek z kodem kreskowym, z unikalnym kodem dla kaŋdego narzędzia. Gdy kontroler robota mówi maszynie, ŋe potrzebuje okreķlonego narzędzia, robot moŋe wyszukaæ odpowiedni znacznik i wykonaæ ruchy zgodnie z podprogramem programu dla tego narzędzia. Nawet jeķli narzędzie zostanie zgubione, o ile znajduje się w obszarze roboczym robota lub w zakresie ruchu, moŋna je ģatwo znaležæ.
BEACON
Sygnaģ nawigacyjny to urządzenie pomagające robotom w nawigacji. Sygnaģy nawigacyjne moŋna podzieliæ na pasywne lub aktywne. Lustro jest dobrym przykģadem pasywnej latarni. Nie wytwarza wģasnego sygnaģu; odbija jedynie promienie ķwietlne, które go uderzają. Robot wymaga nadajnika, takiego jak lampa bģyskowa lub wiązka laserowa, oraz odbiornika, takiego jak fotokomórka. Odlegģoķæ do kaŋdego zwierciadģa moŋna okreķliæ na podstawie czasu potrzebnego na dostanie się lampy bģyskowej do lustra i powrót do robota. Poniewaŋ to opóžnienie jest wyjątkowo krótkim przedziaģem czasu, duŋa prędkoķæ potrzebna jest aparatowi pomiarowemu. Przykģadem aktywnego sygnaģu nawigacyjnego jest nadajnik radiowy. Kilka nadajników moŋna umieķciæ w róŋnych miejscach, a ich sygnaģy są zsynchronizowane, dzięki czemu wszystkie są dokģadnie w fazie. Gdy robot się porusza, względna faza sygnaģów jest róŋna. Korzystając z komputera wewnętrznego, robot moŋe okreķliæ swoją pozycję, porównując fazy sygnaģów z sygnaģów nawigacyjnych. Przy aktywnych sygnalizatorach robot nie potrzebuje nadajnika, ale sygnalizatory muszą mieæ žródģo mocy i byæ odpowiednio ustawione.
BEHAVIOR [ZACHOWANIE]
W robotyce zachowanie odnosi się do przetwarzania danych czujnika na okreķlone ruchy, sekwencje ruchów lub zadania. Istnieją trzy gģówne typy: zachowanie odruchowe, zachowanie reaktywne i zachowanie ķwiadome. Zachowanie zwrotne jest najprostszą i najszybszą formą zachowania robotycznego. Czujniki mogą byæ i często są podģączone bezpoķrednio do manipulatorów, ukģadów napędowych lub innych urządzeņ mechanicznych. Oko elektryczne, które uruchamia alarm wģamaniowy, jest dobrym przykģadem urządzenia wykorzystującego zachowanie zwrotne. Gdy wiązka ķwiatģa zostaje przerwana, następuje przerwanie prądu elektrycznego, co powoduje uruchomienie elektronicznego przeģącznika, który przykģada moc do emitera akustycznego. Reaktywne zachowanie obejmuje prymitywny rodzaj inteligencji maszynowej; zakres lub charakter dziaģania zmienia się w zakresie zaleŋnym od jednego lub więcej parametrów w ķrodowisku pracy. Przykģadem reakcji reaktywnej jest dziaģanie czujnika przeciwciķnienia, w którym wielkoķæ momentu przykģadanego przez ramię robota lub efektora koņcowego zmienia się w zaleŋnoķci od oporu mechanicznego oferowanego przez manipulowany obiekt. Ķwiadome zachowanie obejmuje sztuczną inteligencję (AI), w której kontroler robota wykonuje zģoŋone zadania, takie jak gra w szachy lub dokonywanie wyborów zaleŋnych od wielu czynników, których nie moŋna przewidzieæ.
BIASED WYSZUKIWANIE
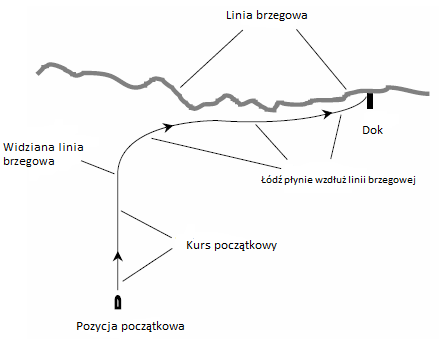
Wyszukiwanie biased to analogiczna metoda, za pomocą której robot mobilny moŋe znaležæ miejsce docelowe lub cel, najpierw spoglądając w bok, a następnie "zerując". Ilustracja pokazuje stronniczy schemat wyszukiwania, z którego wodniak moŋe skorzystaæ w mglisty dzieņ. W pewnej odlegģoķci od linii brzegowej wodniak nie widzi doku, ale ma doķæ dobry pomysģ na to, gdzie się znajduje. Dlatego podejķcie jest celowo oddalone z jednej strony (w tym przypadku z lewej) doku. Gdy brzeg pojawia się w polu widzenia, pģywak skręca w prawo i podąŋa za nim, aŋ do znalezienia doku. Aby robot mógģ efektywnie korzystaæ z tej techniki, musi zaznajomiæ się ze swoim otoczeniem, podobnie jak wodniak z grubsza wie, gdzie będzie dok. Odbywa się to poprzez programowanie na poziomie zadaņ, prymitywną formę sztucznej inteligencji (AI).
BINARNE WYSZUKIWANIE
W komputerze cyfrowym wyszukiwanie binarne, zwane takŋe wyszukiwaniem dychotomizującym, jest metodą lokalizowania elementu w duŋym zestawie elementów. Kaŋda pozycja w zestawie ma przypisany klawisz numeryczny. Liczba klawiszy jest zawsze potęgą 2. Dlatego, gdy jest wielokrotnie dzielona na poģówki, koņcowym wynikiem jest zawsze pojedynczy klucz. Na przykģad, jeķli na liķcie znajduje się 16 pozycji, mogą one byæ ponumerowane od 1 do 16. Jeķli jest 21 pozycji, moŋna je ponumerowaæ od 1 do 21, przy czym cyfry od 22 do 32 są klawiszami "obojętnymi" (niezajętymi). Ŋądany klawisz numeryczny jest najpierw porównywany z najwyŋszym numerem na liķcie. Jeķli ŋądany klucz jest mniejszy niŋ poģowa najwyŋszej liczby na liķcie, wówczas pierwsza poģowa listy jest akceptowana, a druga poģowa jest odrzucana. Jeķli ŋądany klucz jest większy niŋ poģowa najwyŋszej liczby na liķcie, wówczas druga poģowa listy jest akceptowana, a pierwsza poģowa jest odrzucana. Proces ten powtarza się, za kaŋdym razem wybierając poģowę listy i odrzucając drugą poģowę, aŋ pozostanie tylko jeden element. Ten element jest poŋądanym kluczem. Ilustracja pokazuje przykģad wyszukiwania binarnego w celu wybrania jednego elementu z listy 21. Klucze są oznaczone wypeģnionymi kwadratami, z wyjątkiem poŋądanego klawisza 21, który jest zaznaczony zacienionym kóģkiem. jako otwarte kwadraty

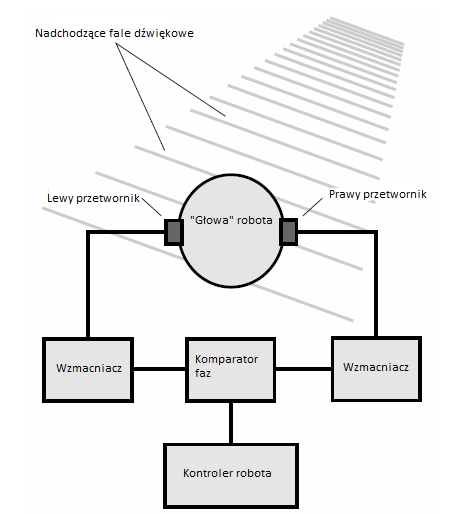
BINAURALNA OBSĢUGA MASZYNY
Dwuuszne sģyszenie maszynowe wykorzystuje dwa przetworniki džwięku, rozmieszczone w pewnej minimalnej odlegģoķci od siebie, w celu okreķlenia kierunku, z którego nadchodzą fale akustyczne. Odbywa się to poprzez porównanie względnej fazy i / lub względnej gģoķnoķci nadchodzących frontów falowych w przetwornikach. Ukģad ucha / mózgu czģowieka przetwarza informacje akustyczne z duŋą dokģadnoķcią, umoŋliwiając zlokalizowanie žródģa džwięku z niezwykģą dokģadnoķcią, nawet gdy žródģa nie moŋna zobaczyæ. Po wyposaŋeniu w czuģe przetworniki, obwód zwany komparatorem faz i wyrafinowany sterownik robot moŋe zrobiæ to samo. W dwuusznym sģyszeniu maszynowym dwa przetworniki džwięku są umieszczone po obu stronach "gģowy" robota. Komparator faz mierzy względną fazę i intensywnoķæ sygnaģów z dwóch przetworników. Dane te są przesyģane do kontrolera, pozwalając robotowi, z pewnymi ograniczeniami, okreķliæ kierunek, z którego dochodzi džwięk (patrz ilustracja). Jeķli system jest zdezorientowany, gģowa robota moŋe się obracaæ, dopóki nie zostanie wyeliminowane zamieszanie i nie zostanie osiągnięte znaczące ģoŋysko.
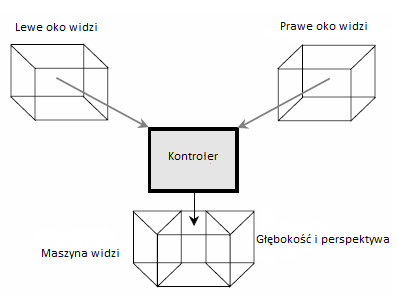
BINOKULARNEJ MASZYNY WIZJA
Obuoczne widzenie maszynowe jest analogią do obuocznego widzenia czģowieka. Czasami nazywa się to widzeniem stereoskopowym. U ludzi widzenie obuoczne pozwala postrzegaæ gģębię. Jednym okiem, to znaczy w przypadku widzenia jednoocznego, czģowiek moŋe wywnioskowaæ gģębię do pewnego stopnia na podstawie perspektywy. Prawie wszyscy mieli jednak okazję byæ oszukiwani, patrząc na scenę z zakrytym lub zablokowanym okiem. Pobliski sģup i daleka wieŋa mogą wydawaæ się byæ blisko siebie, podczas gdy w rzeczywistoķci są one setki metrów od siebie. W przypadku robota widzenie obuoczne wymaga wyrafinowanego mikroprocesora. Wnioski dokonywane przez ludzi na podstawie tego, co widzą dwoje oczu, są niezwykle skomplikowane. Ilustracja pokazuje podstawową koncepcję widzenia obuocznego. Podstawowe znaczenie dla dobrego widzenia robotów przez lornetkę mają:
• Czujniki wizualne o wysokiej rozdzielczoķci
• Zaawansowany sterownik robota
• Programowanie, w którym robot dziaģa na podstawie poleceņ, na podstawie czego to widzi
BIN PICKING PROBLEM [PROBLEM Z WYBIERANIEM POJEMNIKA]
Problem polegający na podnoszeniu pojemników stanowi wyzwanie dla zrobotyzowanego systemu wizyjnego, w którym maszyna musi wybraæ konkretny obiekt z grupy obiektów. Podstawowe systemy wizyjne mogą widzieæ tylko kontury obiektów; brak percepcji gģębi. Patrząc z róŋnych punktów widzenia przez taki system wizyjny, wygląd obiektu moŋe się znacznie róŋniæ.
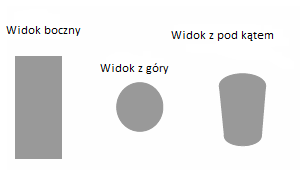
Ilustracja przedstawia przykģad cylindrycznej szklanki do picia. Patrząc dokģadnie z boku, wygląda jak prostokąt i jego wnętrze (po lewej). Z góry lub z doģu wygląda jak koģo i jego wnętrze (ķrodek). Pod poķrednim kątem ma ksztaģt podobny do pokazanego po prawej stronie. Problem rozpoznawania obiektów jest spotęgowany, gdy okreķlony obiekt musi zostaæ pobrany z kosza zawierającego wiele innych obiektów. Niektóre, większoķæ lub wszystkie poŋądane obiekty mogą byæ zasģonięte przez inne obiekty. Jednym z największych wyzwaņ w rozwoju sztucznej inteligencji (AI) jest umoŋliwienie robotom rozwiązania tego rodzaju problemów. Jednym ze sposobów pomocy robotowi w wybieraniu przedmiotów z kosza jest nadanie kaŋdemu przedmiotowi kodu. Moŋna tego dokonaæ za pomocą kodów kreskowych lub pasywnych transponderów.
BIOCHIP
Biochip to ukģad scalony (IC) wytworzony z ŋywej materii lub z niej za pomocą procesów biologicznych. Termin ten zostaģ równieŋ zasugerowany dla ukģadów scalonych wytwarzanych przy uŋyciu technik naķladujących sposób, w jaki natura ģączy atomy. Sugerowano, ŋe ludzki mózg jest tak naprawdę wyrafinowanym komputerem. Kaŋdy komputer cyfrowy, bez względu na to, jak skomplikowany, jest zawsze zbudowany z pojedynczych bramek logicznych. To samo moŋna powiedzieæ o ludzkim mózgu. Natura skģada mózg (lub dowolną inną ŋywą materię), ģącząc protony, neutrony i elektrony razem w okreķlone, z góry okreķlone wzory. Kaŋdy proton jest identyczny z kaŋdym innym protonem; to samo dotyczy neutronów i elektronów. Bloki konstrukcyjne są proste. Sposób, w jaki są one ģączone, jest skomplikowany. Opierając się na tych przesģankach, uzasadnione jest zaģoŋenie, ŋe komputer moŋe byæ "hodowany" tak inteligentny jak ludzki mózg. Niektórzy badacze patrzą na sposób, w jaki natura buduje rzeczy, aby uzyskaæ pomysģy na budowę ulepszonych ukģadów scalonych. Ostatecznym celem jest biochip, który wyrasta i ewoluuje jako roķlina, ze specjalnie zaprojektowanego "ziarna".
BIOLOGICZNY ROBOT
Robot biologiczny jest hipotetyczną maszyną pochodzącą z klonowania z ŋywych organizmów i hodowaną w ķrodowisku laboratoryjnym w celu wykonania okreķlonej funkcji lub zestawu funkcji. Przeprowadzono badania w tej dziedzinie, chociaŋ prawdziwe roboty biologiczne nie zostaģy jeszcze sfabrykowane lub dorosģy. Roboty biologiczne sģuŋyģy jako postacie w opowiadaniach science fiction. Moŋliwoķci stwarzane przez to pojęcie są ograniczone jedynie wyobražnią. Istnieją pytania i problemy etyczne w badaniach robotów biologicznych. Kwestie te budzą tak powaŋne obawy, ŋe niektórzy naukowcy odmawiają pracy w tej dziedzinie.
BIOMECHANIZM
Biomechanizm to mechaniczne urządzenie, które symuluje pracę pewnej częķci ŋywego ciaģa. Przykģadami biomechanizmów są mechaniczne dģonie, ręce i nogi, znane w medycynie jako protezy. Zwģaszcza termin ten dotyczy robotów, które nie tylko wykonują funkcje swoich ŋywych odpowiedników, ale równieŋ wyglądają jak one. Termin biomechanizm moŋna równieŋ stosowaæ w odniesieniu do niektórych funkcji organizmu. Moŋna zatem mówiæ o strukturze przedramienia i dģoni, nazywając go biomechanizmem. Anatomia czģowieka okazaģa się w rzeczywistoķci doskonaģym modelem do projektowania urządzeņ robotycznych.
BIOMECHATRONIKA
Sģowo biomechatronika to skrót sģów biologia, mechanika i elektronika. Dziedzina biomechatroniki jest częķcią większej dziedziny robotyki i sztucznej inteligencji (AI). W szczególnoķci biomechatronika obejmuje urządzenia elektroniczne i mechaniczne, które kopiują ludzkie częķci ciaģa i ich funkcje. Biomechatronika zyskaģa większą uwagę w Japonii niŋ w Stanach Zjednoczonych. W Japonii niektórzy badacze robotów atakują swoje problemy religijną gorliwoķcią. Japoņscy inŋynierowie robotyki nie tylko chcieliby budowaæ roboty, które mogą robiæ wszystko, co ludzie mogą robiæ, ale niektórzy chcą, aby ich roboty równieŋ wyglądaģy jak ludzie. Ostatecznym urządzeniem biomechatronicznym jest Android. Naukowcy ogólnie zgadzają się, ŋe inteligentny android nie będzie rozwijany przez wiele lat. Do problemu tworzenia androidów moŋna podejķæ z dwóch kierunków. Z jednej strony roboty biologiczne mogą byæ hodowane w laboratoriach poprzez proces klonowania. Ta idea jest zasģonięta gģębokimi problemami etycznymi. Z drugiej strony inŋynierowie mogą próbowaæ zbudowaæ robota mechanicznego o zręcznoķci i inteligencji czģowieka. Równieŋ to pojęcie rodzi pytania etyczne, ale w mniejszym stopniu.
BIPED ROBOT [ROBOT DWUNOŊNY]
Dwunoŋny robot to robot o dwóch nogach, który sģuŋy do podparcia i napędu zwykle, ale nie zawsze, takie roboty mają ramiona i gģowę, więc są androidami. Fizycznie dwunoŋne roboty są niestabilne, chyba ŋe są wyposaŋone w specjalistyczne systemy równowaŋenia. Ludzie mogą sobie poradziæ dwiema nogami, poniewaŋ mózg i ucho wewnętrzne stanowią razem system sprzęŋenia zwrotnego zapewniający dobre poczucie równowagi. Ludzkie poczucie równowagi moŋna powieliæ elektromechanicznie, ale projekty są wyrafinowane i drogie. Roboty, które uŋywają nóg do napędu, mają na ogóģ cztery lub szeķæ nóg, poniewaŋ te konstrukcje oferują lepszą wewnętrzną stabilnoķæ niŋ ukģad dwunoŋny.
BITOWEJ MAPY GRAFIKA
W robotycznym systemie wizyjnym obraz moŋe byæ zģoŋony z tysięcy maģych kwadratowych elementów. Im mniejsze elementy, zwane pikselami, tym więcej szczegóģów obraz moŋe pokazaæ dla danego rozmiaru obrazu. Obrazy wykonane w ten sposób to grafika z mapowaniem bitów, znana równieŋ jako grafika rastrowa. Na ekranie komputera widziany obraz jest wzorem pikseli w cienkiej, splecionej siatce. Moŋesz obserwowaæ te piksele, jeķli przyciemnisz monitor, dzięki czemu prawie nie zobaczysz obrazu (to waŋne!), A następnie przyjrzysz mu się uwaŋnie przez powiększającą soczewkę o duŋej mocy. Komputer przechowuje bitmapy obrazów graficznych jako szeroki wachlarz logicznych wzlotów i upadków (jedynki i zera). Aby uzyskaæ obraz z tej tablicy bitów, komputer wykorzystuje funkcję zwaną mapą bitów. Grafika z mapowaniem bitów zawsze generuje przybliŋenia scen lub obiektów. Jest tak, poniewaŋ kaŋdy piksel jest kwadratem i moŋe przyjmowaæ tylko okreķlone wartoķci cyfrowe. Jeķli liczba pikseli na obrazie jest bardzo duŋa, przybliŋenie stanowi dobrą reprezentację rzeczywistoķci w większoķci przypadków. Jednak szczegóģowoķæ uzyskiwana za pomocą grafiki z mapowaniem bitów jest zawsze ograniczona przez rozdzielczoķæ obrazu. Grafika z mapowaniem bitów tworzy artefakt zwany jaggies lub aliasingiem, swoisty "cyfrowy" wygląd krawędzi renderowanych obiektów. Pionowe i poziome linie wyglądają dobrze, ale krzywe i przekątne są szorstkie za pomocą "zębów piģy". zostaæ zmniejszone za pomocą oprogramowania antyaliasingowego lub redukcji kserokopii, ale lepszym sposobem jest uŋycie grafiki obiektowej.
BLACKBOARD SYSTEM
System tablicowy wykorzystuje sztuczną inteligencję (AI), aby pomóc komputerowi rozpoznawaæ džwięki lub obrazy. Przychodzący sygnaģ jest przetwarzany na postaæ cyfrową za pomocą przetwornika analogowo-cyfrowego (ADC). Dane cyfrowe są wprowadzane do obwodu pamięci odczytu / zapisu zwanego tablicą. Następnie dane cyfrowe są oceniane przez róŋne programy specjalistyczne. Ogólny schemat przedstawiono na schemacie.
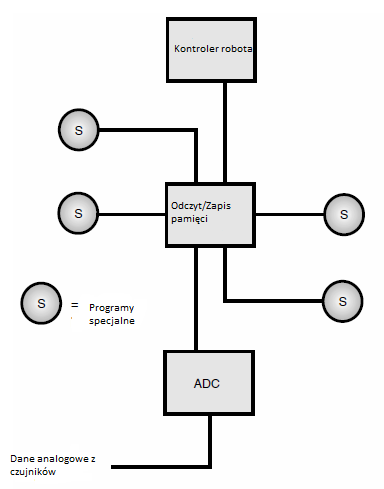
Do rozpoznawania mowy specjalnoķciami są džwięki samogģoskowe, džwięki spóģgģoskowe, gramatyka, skģadnia, kontekst i inne zmienne. Na przykģad program specjalizujący się w kontekķcie moŋe ustaliæ, czy mówca chce powiedzieæ "zwaŋyæ", "sposób", "dwa", "teŋ" lub "do". Inny program informuje kontroler o zakoņczeniu zdania i rozpoczęciu następnego. Inny program moŋe odróŋniæ stwierdzenie od pytania. Korzystając z tablicy jako forum, obwody specjalne "debatują" o najbardziej prawdopodobne i logiczne interpretacje tego, co sģychaæ lub oglądaæ. "Sędzia" zwany specjalistą ds. Ogniskowania mediuje. Do rozpoznawania obiektów specjalnoķciami mogą byæ ksztaģt, kolor, rozmiar, tekstura, wysokoķæ, szerokoķæ, gģębokoķæ i inne wskazówki wizualne. Jak komputer wie, czy przedmiotem jest filiŋanka na stole lub wieŋa ciķnieņ w odlegģoķci mili? Czy to jasna lampa, czy sģoņce? Czy to dwunoŋne stworzenie to robot, manekin czy osoba? Podobnie jak w przypadku rozpoznawania mowy, tablica sģuŋy jako miejsce dyskusji.
BLADDER GRIPPER [CHWYTAK PĘCHERZA]
Chwytak pęcherza lub ręka pęcherza to wyspecjalizowany robotyczny efektor koņcowy, który moŋe byæ uŋywany do chwytania, podnoszenia i przemieszczania przedmiotów w ksztaģcie pręta lub cylindrów. Gģównym elementem chwytaka jest nadmuchiwana, cylindryczna tuleja w ksztaģcie pączka, która przypomina mankiet powszechnie stosowany w aparacie do pomiaru ciķnienia krwi. Tuleja jest tak ustawiona, ŋe otacza przedmiot, który ma byæ chwycony, a następnie tuleja jest pompowana, aŋ będzie wystarczająco ciasna, aby wykonaæ poŋądane zadanie. Nacisk wywierany przez tuleję moŋna mierzyæ i regulowaæ za pomocą czujników siģy. Chwytaki pęcherza są przydatne w postępowaniu z delikatnymi przedmiotami. Nie dziaģają one jednak szybko i mogą dziaģaæ tylko z obiektami w raczej wąskim zakresie rozmiarów fizycznych.
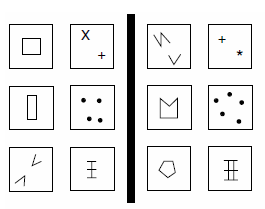
BONGARDA PROBLEM
Problem Bongarda, nazwany na czeķæ jego wynalazcy, jest metodą oceny, jak dobrze robotyczny system wizyjny potrafi rozróŋniaæ wzorce. Rozwiązanie takich problemów wymaga pewnego poziomu sztucznej inteligencji (AI). Przykģad problemu Bongarda pokazano na ilustracji. Istnieją dwie grupy szeķciu skrzynek. Wszystkie pola po lewej mają ze sobą coķ wspólnego; te po prawej mają tę samą wspólną cechę, ale w innym stopniu lub w inny sposób. Aby rozwiązaæ problem, system wizyjny (lub Ty) musi odpowiedzieæ na trzy pytania:
• Co ģączy zawartoķæ pól po lewej stronie cięŋkiej pionowej linii?
• Co ģączy zawartoķæ pól po prawej stronie wiersza?
• Jaka jest róŋnica między zawartoķcią pudeģ po przeciwnych stronach cięŋkiej, pionowej linii?
W tym przypadku pola po lewej zawierają po cztery kropki lub linie proste; te po prawej zawierają po pięæ kropek lub proste linie. Róŋnica między polami po lewej stronie a polami po prawej stronie polega zatem na liczbie kropek lub linii prostych w nich zawartych
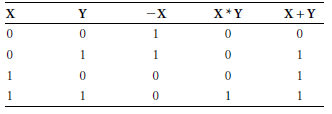
BOOLEAN ALGEBRA
Algebra boolowska to system logiki matematycznej wykorzystujący liczby 0 i 1 z operacjami AND (mnoŋenie), OR (dodawanie) i NOT (negacja). Kombinacje tych operacji to NAND (NIE AND) i NOR (NOT OR). Funkcje logiczne są wykorzystywane w projektowaniu cyfrowych ukģadów logicznych. W algebrze logicznej X i Y są zapisywane XY lub X * Y. NOT X jest zapisany linią lub tyldą nad iloķcią lub jako znak minus, po którym następuje iloķæ. X LUB Y jest zapisany X + Y. Tabela pokazuje wartoķci tych funkcji, gdzie 0 oznacza "faģsz", a 1 oznacza "prawdę". Stwierdzenia po obu stronach znaku równoķci są logicznie równowaŋne.
BRANCHING [ROZGAĢĘZIENIE]
Rozgaģęzienie odnosi się do procedur lub programów, które mają punkty, w których inteligentny sterownik robota musi wybieraæ spoķród alternatyw.
Zastanów się nad robotem na linii montaŋowej produkującej samochody. Zadaniem robota jest wkģadanie koģpaków w dwa prawe koģa. (Identyczny robot wykonuje tę samą pracę po lewej stronie). Zaģóŋmy, ŋe 20 procent samochodów jest wyposaŋonych w koģpaki w kolorze zģotym (G); pozostaģe są wyposaŋone w srebrne (S). Robot powinien wstawiaæ koģpaki w następującej kolejnoķci: SS SS SS SS GG SS SS SS SS GG SS SS
i tak dalej. Co piąta para koģpaków jest zģota. Za kaŋdym razem, gdy ma zostaæ wstawiona para hubcap, komputer musi dokonaæ wyboru. Zatem procedura znajduje się w punkcie rozgaģęzienia dla kaŋdej pary hubcap. Co piąty raz naleŋy dokonaæ wyboru, sterownik robota wybiera zģote koģpaki. W przeciwnym razie wybiera srebrne. Ta sekwencja jest zaprogramowana w sterowniku. Logiczny proces przebiega podobnie do schematu na doģączonej ilustracji.
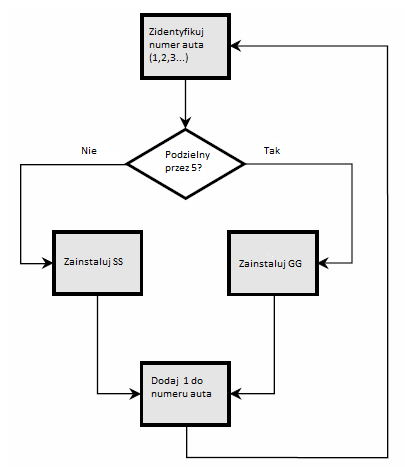
Zaģóŋmy, ŋe występuje usterka, w której kontroler robota lub sprzęt pomija lub pomija pojedynczy hubcap. Spowoduje to, ŋe robot postrzega sekwencję samochodów, więc myķli, ŋe do kaŋdego zestawu tylnych kóģ przybyģ nowy samochód. Wkrótce przednie koģo samochodu otrzyma srebrną koģpak, a tylne koģo tego samego samochodu otrzyma zģotą. Następny samochód otrzyma zģotą koģpak na przednim kole i srebrny na tylnym kole. Następstwa będą powtarzane w kóģko, psując dwa na pięæ samochodów lub 40 procent samochodów zjeŋdŋających z linii montaŋowej.
BURN-IN
Przed uŋyciem jakiegokolwiek systemu elektronicznego lub elektromechanicznego naleŋy poddaæ go procesowi wypalenia. Zwykle wymaga to ciągģego dziaģania systemu przez kilka godzin, dni lub tygodni. W niektórych przypadkach wadliwy system ulega awarii wkrótce po przejķciu do trybu online. Jednak w wielu przypadkach awaria nie występuje, dopóki nie upģynie znaczny czas. Przerywane awarie mogą się nie ujawniæ, dopóki nie minie wiele godzin ciągģego nadzoru. Proces wypalania moŋe wyeliminowaæ systemy z problemami wczesnej awarii, minimalizując awarie w czasie rzeczywistym.
Napęd kablowy to metoda przenoszenia energii mechanicznej w systemie robotycznym z urządzenia wykonawczego do manipulatora lub efektora koņcowego. Ten rodzaj napędu moŋe byæ równieŋ stosowany w ukģadach napędowych z napędem na koģa oraz w niektórych urządzeniach wskazujących. System skģada się z kabla lub sznurka i zestawu kóģ pasowych. Gģównym atutem napędu kablowego jest jego prostota. Gģównym ograniczeniem jest to, ŋe kabel moŋe ķlizgaæ się na koģach lub koģach pasowych, a z czasem kabel moŋe się zdegenerowaæ, a ostatecznie pęknąæ bez ostrzeŋenia. Kaŋdy, kto utknąģ na autostradzie z powodu awarii paska wentylatora samochodowego, moŋe zaķwiadczyæ, ŋe problemy, które moŋe to powodowaæ.
CAPACITIVE PRESSURE SENSOR [POJEMNOĶCIOWY CZUJNIK CIĶNIENIA]
Pojemnoķciowy czujnik ciķnienia skģada się z dwóch metalowych pģyt oddzielonych warstwą nieprzewodzącej (dielektrycznej) pianki. Powstaģy zmienny kondensator jest poģączony równolegle z cewką; obwód indukcyjnoķci / pojemnoķci (LC) okreķla częstotliwoķæ oscylatora. Jeķli obiekt uderzy w czujnik, odstępy między pģytami chwilowo się zmniejszają. Zwiększa to pojemnoķæ, powodując spadek częstotliwoķci oscylatora. Kiedy obiekt odsuwa się od przetwornika, piana odskakuje, pģytki powracają do pierwotnego odstępu, a częstotliwoķæ oscylatora wraca do normy. Ilustracja jest funkcjonalnym schematem blokowym pojemnoķciowego czujnika ciķnienia. Wyjķcie czujnika moŋna przekonwertowaæ na dane cyfrowe za pomocą konwertera analogowo-cyfrowego (ADC), a następnie przesģaæ do sterownika robota. Czujniki ciķnienia moŋna montowaæ w róŋnych miejscach na robocie mobilnym, takich jak przód, tyģ i boki. Następnie, na przykģad, fizyczny nacisk na czujnik z przodu robota moŋe wysģaæ sygnaģ do kontrolera, który kaŋe maszynie cofnąæ się.
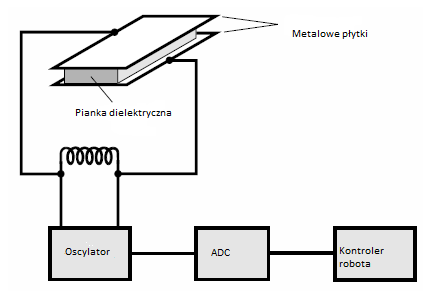
Pojemnoķciowy czujnik ciķnienia moŋna oszukaæ przez masywne przewodzące lub póģprzewodnikowe obiekty w jego pobliŋu. Jeķli taka masa zbliŋa się do przetwornika, pojemnoķæ zmienia się, nawet jeķli nie nastąpi bezpoķredni kontakt. Zjawisko to znane jest jako pojemnoķæ ciaģa. Kiedy tego efektu naleŋy unikaæ, do wykrywania ciķnienia moŋna zastosowaæ elastomer. Zjawisko to moŋe byæ jednak przydatne do wykrywania zbliŋeniowego.
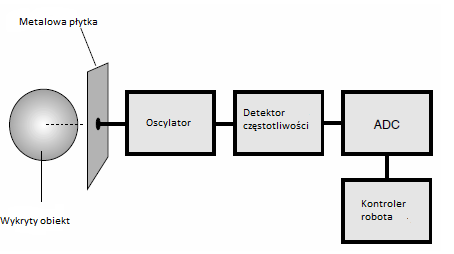
CAPACITIVE PROXIMITY SENSOR [POJEMNOĶCIOWY CZUJNIK ZBLIŊENIOWY]
Pojemnoķciowy czujnik zbliŋeniowy wykorzystuje wzajemną pojemnoķæ, która występuje pomiędzy lub między obiektami blisko siebie. Pojemnoķciowy czujnik zbliŋeniowy wykorzystuje oscylator o częstotliwoķci radiowej (RF), detektor częstotliwoķci i metalową pģytkę podģączoną do obwodu oscylatora, jak pokazano na schemacie. Oscylator jest zaprojektowany w taki sposób, ŋe zmiana pojemnoķci pģyty w stosunku do ķrodowiska powoduje zmianę częstotliwoķci. Ta zmiana jest wykrywana przez detektor częstotliwoķci, który wysyģa sygnaģ do urządzenia sterującego robotem. W ten sposób, jeķli system jest odpowiednio zaprojektowany, robot moŋe uniknąæ wpadania na przedmioty. W niektórych detektorach indukowana pojemnoķæ powoduje caģkowite zatrzymanie oscylacji.
Przedmioty przewodzące prąd do pewnego stopnia, takie jak okablowanie domu, ludzie, samochody lub lodówki, są ģatwiej wykrywane przez przetworniki pojemnoķciowe niŋ rzeczy, które nie przewodzą, takie jak drewniane krzesģa i drzwi. Dlatego teŋ inne rodzaje czujników zbliŋeniowych są niezbędne, aby robot dobrze nawigowaģ w zģoŋonym ķrodowisku, takim jak dom lub biuro.
CARTESIAN COORDINATE GEOMETRY [GEOMETRIA WSPÓĢRZĘDNYCH KARTESYJSKICH]
Kartezjaņska geometria wspóģrzędnych jest powszechną metodą, za pomocą której manipulator robota (ramię) moŋe się poruszaæ. Termin ten wywodzi się z kartezjaņskiego lub prostokątnego ukģadu wspóģrzędnych uŋywanego do tworzenia wykresów funkcji matematycznych. Alternatywnie ten schemat ruchu nazywa się prostokątną geometrią wspóģrzędnych. Rysunek przedstawia kartezjaņski ukģad wspóģrzędnych w dwóch wymiarach. Osie są do siebie prostopadģe. W tym przypadku są one w górę / w dóģ (w pionie) i w lewo / w prawo (w poziomie). Istnieją równieŋ trójwymiarowe (3-D) systemy kartezjaņskie. W systemie trójwymiarowym istnieją trzy osie liniowe, przy czym kaŋda oķ jest prostopadģa do pozostaģych dwóch. Manipulator pokazany na ilustracji moŋna przekonwertowaæ na trójwymiarową geometrię kartezjaņską, umoŋliwiając pionowy pręt przesuwanie się do przodu i do tyģu (na stronie i na zewnątrz) wzdģuŋ poziomej ķcieŋki.
CENTRALIZED CONTROL [SCENTRALIZOWANA KONTROLA]
W systemie zawierającym więcej niŋ jednego robota scentralizowane sterowanie odnosi się do nadzoru nad wszystkimi poszczególnymi robotami przez jednego kontrolera. Komunikacja między kontrolerem a robotami odbywa się zwykle za pomocą ķrodków bezprzewodowych, takich jak radio, chociaŋ moŋna zastosowaæ inne ķrodki, takie jak przewód elastyczny lub kable ķwiatģowodowe. Ten typ systemu robotycznego jest nieco analogiczny do sieci komputerowej klient-serwer. W centralnie sterowanym systemie robotycznym gģówny komputer peģni rolę quasi-ludzkiego operatora. W niektórych systemach poszczególne roboty są częķciowo autonomiczne i zawierają wģasne kontrolery; pozwala to systemowi na utrzymanie peģnej wydajnoķci przez pewien czas, nawet w przypadku przerwy w jednym lub większej liczbie ģączy komunikacyjnych. Jest to znane jako częķciowo scentralizowane sterowanie. Innym przykģadem częķciowo scentralizowanego sterowania jest system, w którym kaŋdy robot odbiera zestaw instrukcji od sterownika, przechowuje te instrukcje, a następnie wykonuje je niezaleŋnie od sterownika centralnego. W niektórych systemach robotycznych poszczególne jednostki są caģkowicie i stale zaleŋne od centralnego sterownika i nie mogą dziaģaæ, jeķli poģączenie komunikacyjne zostanie przerwane. Mówi się, ŋe taki system wykorzystuje w peģni scentralizowaną kontrolę.
CHAIN DRIVE [NAPĘD ĢAŅCUCHOWY]
Napęd ģaņcuchowy to metoda przenoszenia energii mechanicznej w systemie robotycznym z elementu wykonawczego do manipulatora lub efektora koņcowego. Moŋe byæ równieŋ stosowany w ukģadach napędowych z napędem koģowym. System skģada się z ģaņcucha i zestawu kóģ z koģami ģaņcuchowymi. Gģównym atutem napędu ģaņcuchowego jest jego prostota. Moŋe zapewniæ dodatkową przyczepnoķæ w porównaniu z napędem linowym, poniewaŋ ģaņcuch prawdopodobnie nie ķlizga się na zębatkach. Kolejnym atutem jest fakt, ŋe zmienną prędkoķæ i moc moŋna uzyskaæ za pomocą kóģ zębatych o róŋnych rozmiarach, w poģączeniu z mechanizmem zmiany biegów. Z drugiej strony ģaņcuch moŋe spaķæ z kóģ ģaņcuchowych. Ģaņcuch wymaga smarowania i konserwacji, a jego dziaģanie moŋe byæ haģaķliwe. Typowy przykģad napędu ģaņcuchowego moŋna znaležæ w kaŋdym rowerze.
CCD MATRYCA
Matryca CCD to kamera, która przeksztaģca ķwiatģo widzialne obrazu w sygnaģy cyfrowe. Niektóre matryce CCD dziaģają równieŋ z podczerwienią (IR) lub ultrafioletem (UV). Zwykģe aparaty cyfrowe dziaģają na zasadzie podobnej do CCD. Obraz skupiony na siatkówce ludzkiego oka lub na kamerze konwencjonalnego aparatu jest obrazem analogowym. Moŋe mieæ nieskoņczenie wiele konfiguracji i nieskoņczenie wiele odmian odcienia, jasnoķci, kontrastu i nasycenia. Komputer cyfrowy potrzebuje jednak obrazu cyfrowego, aby zrozumieæ i ulepszyæ to, co "widzi". Binarne sygnaģy cyfrowe mają tylko dwa moŋliwe stany: wysoki i niski lub 1 i 0. Moŋna uzyskaæ doskonaģe przybliŋenie obrazu analogowego w postaci wysokich i niskich sygnaģów cyfrowych. Umoŋliwia to programowi komputerowemu przetworzenie obrazu, ukazując szczegóģy i funkcje, które w innym przypadku byģyby niemoŋliwe do wykrycia. Na ilustracji przedstawiono uproszczony schemat blokowy matrycy CCD. Obraz spada na matrycę zawierającą tysiące lub miliony maleņkich czujników. Kaŋdy czujnik wytwarza jeden piksel (element obrazu). Komputer (nie pokazano) moŋe wykorzystywaæ wszystkie triki charakterystyczne dla kaŋdego dobrego programu graficznego. Oprócz renderowania obrazów o wysokim kontraķcie lub faģszywych kolorach, CCD i komputer razem mogą wykrywaæ i rozwiązywaæ obrazy znacznie sģabiej niŋ jest to moŋliwe w przypadku konwencjonalnych filmów z kamer lub bardziej prymitywnych rodzajów kamer wideo. To sprawia, ŋe CCD jest uŋyteczny w robotach, które muszą stosowaæ noktowizor.
CHECKERS AND CHESS [WARCABY I SZACHY]
Komputer moŋna zaprogramowaæ do gry w warcaby. Doskonaģy program zostaģ stworzony przez Arthura Samuela, w którym komputer moŋe nie tylko graæ w grę ruch po ruchu, ale moŋe takŋe patrzeæ w przyszģoķæ lub przewidywaæ, aby zobaczyæ moŋliwe konsekwencje ruchu. Warcaby to doķæ prosta gra planszowa. Jest bardziej zģoŋony niŋ kóģko i krzyŋyk, ale o wiele mniej wyrafinowany niŋ szachy. Kaŋdy, kto graģ w kóģko i krzyŋyk, odkryģ, ŋe zawsze moŋna uzyskaæ przynajmniej remis (remis). Jest to tak elementarne, ŋe licealista z pewnym doķwiadczeniem programistycznym moŋe zmusiæ komputer do gry w kóģko i krzyŋyk. W tej grze maszyna musi patrzeæ tylko o jeden ruch do przodu. Strategia wybiegania obejmująca więcej niŋ jeden ruch wymaga pewnej iloķci praktyki lub nauki. Komputery moŋna jednak zaprogramowaæ tak, aby uczyģy się na wģasnych bģędach. Program kontrolny Artura Samuela wykorzystuje strategię wybierania wielu ruchów tak skutecznie, ŋe nawet najlepsi ludzcy gracze na ķwiecie nie są w stanie pokonaæ swojej maszyny. Istnieje inny schemat, który moŋna zastosowaæ do gry w warcaby: przyjąæ ogólny plan gry. Ogólne strategie moŋna ogólnie podzieliæ na defensywne lub ofensywne. Programy defensywne / ofensywne wymagają przewidywania tylko jednego ruchu. Szachy zostaģy wykorzystane do opracowania i przetestowania inteligencji maszyn. Jedna z pierwszych maszyn do gry w szachy zostaģa opracowana przez Rand Corporation w 1956 roku. Szachy to zģoŋona gra. Komputer musi patrzeæ w przyszģoķæ więcej niŋ jeden ruch, aby zagraæ w dobrą grę w szachy. Wiele strategii wybiegających w przyszģoķæ wraz z uczeniem maszynowym moŋe umoŋliwiæ komputerowi granie w szachy na poziomie umiejętnoķci porównywalnym z mistrzami. Program opracowany przez Rand Corporation byģ w stanie udowodniæ pewne twierdzenia matematyczne. To kolejny dobry sposób na przetestowanie inteligencji komputera.
CZYSTY POKÓJ
Czysty pokój to komora specjalnie zaprojektowana i obsģugiwana w celu zminimalizowania zanieczyszczeņ w powietrzu. W niektórych branŋach waŋne jest, aby kurz, brud, bakterie i inne cząstki byģy ograniczone do absolutnego minimum. Dobrym przykģadem jest produkcja ukģadów scalonych (IC) do systemów elektronicznych i komputerowych. Roboty mają znaczną przewagę nad ludžmi w tych ķrodowiskach. Jeķli zostaną zachowane pewne ķrodki ostroŋnoķci, ķrodowisko w pomieszczeniu moŋe byæ utrzymywane w czystoķci, jednoczeķnie wpuszczając ludzi. Ludzie, którzy wchodzą do takiego pomieszczenia, muszą najpierw zaģoŋyæ szczelne kombinezony, rękawiczki i buty. Pokój, do którego wchodzą tylko roboty, a nie ludzie, zawsze moŋe byæ odrobinę czystszy. Zanieczyszczenie w czystym pomieszczeniu jest mierzone liczbą cząstek o okreķlonej wielkoķci w 1 litrze (1000 centymetrów szeķciennych) powietrza. Alternatywnie, metr szeķcienny jest uŋywana jako standardowa jednostka objętoķci.
CHYĢOMIERZ
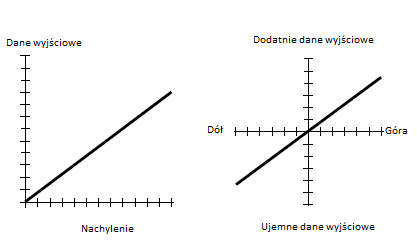
Klinometr to urządzenie do pomiaru stromoķci pochyģej powierzchni. Roboty mobilne uŋywają klinometrów, aby unikaæ pochyģoķci, które mogģyby spowodowaæ, ŋe przechylą się za daleko, a nawet przewrócą się. Podģoga w budynku jest prawie zawsze pozioma. Zatem jego nachylenie wynosi zero. Ale czasami są pochyģoķci, takie jak rampy. Dobrym przykģadem jest rodzaj rampy wykorzystywanej do wózków inwalidzkich, w której bardzo maģa wysokoķæ zmiany następuje. Toczący się robot nie moŋe wspinaæ się po schodach, ale moŋe korzystaæ z rampy dla wózków inwalidzkich, pod warunkiem, ŋe rampa nie jest tak stroma, ŋe zakģóca równowagę robota lub powoduje jego rozlanie lub upuszczenie. Klinometr wytwarza sygnaģ elektryczny za kaŋdym razem, gdy jest przechylony. Im większy kąt nachylenia, tym większa jest moc elektryczna, jak pokazano po lewej stronie wykresu. Klinometr moŋe równieŋ wykazaæ, czy nachylenie spada, czy podnosi. Nachylenie w dóģ moŋe powodowaæ ujemne napięcie na wyjķciu przetwornika, a nachylenie w górę dodatnie napięcie, jak pokazano po prawej stronie wykresu.
CLOSED-LOOP CONTROL [STEROWANIE W PĘTLI ZAMKNIĘTEJ]
Sterowanie w pętli zamkniętej jest formą sterowania ruchem manipulatora robota, w którym ķcieŋka lub trajektoria urządzenia jest często korygowana. Po rozpoczęciu ruchu czujnik pozycji wykrywa moŋliwe bģędy na trajektorii. W przypadku wykrycia bģędu czujnik wysyģa sygnaģ, który dziaģa przez obwód sprzęŋenia zwrotnego, aby przywróciæ manipulatorowi kurs. Termin ten wywodzi się z faktu, ŋe obwody sprzęŋenia zwrotnego i sygnaģ sterujący stanowią razem pętlę zamkniętą. Gģównym atutem sterowania w pętli zamkniętej jest dokģadnoķæ. Ponadto sterowanie w pętli zamkniętej moŋe kompensowaæ szybkie, zlokalizowane lub nieoczekiwane zmiany w ķrodowisku pracy. Gģównymi wadami są większy koszt i zģoŋonoķæ niŋ prostsze systemy, takie jak kontrola balistyczna.
CLOSED-LOOP SYSTEM [SYSTEM PĘTKLI ZAMKNIĘTEJ]
System zamkniętej pętli to zestaw urządzeņ, które regulują jego zachowanie. Zamknięte pętle moŋna znaležæ w wielu rodzajach maszyn, od silnika w samochodzie (regulator) do kontroli wzmocnienia w odbiorniku radiowym (automatyczna kontrola poziomu). System z zamkniętą pętlą, znany równieŋ jako serwomechanizm, ma pewne moŋliwoķci wģączenia mechanicznego sprzęŋenia zwrotnego od wyjķcia do wejķcia. Czujnik na koņcu wyjķciowym generuje sygnaģ, który jest wysyģany z powrotem do wejķcia w celu regulacji zachowania maszyny. Dobrym przykģadem tego jest czujnik przeciwciķnienia. Innym przykģadem jest sterowanie manipulatorem robota w pętli zamkniętej.
COEXISTENCE [WSPÓĢISTNIENIE]
Termin wspóģistnienie odnosi się do zaprogramowanych interakcji między robotami owadowymi, które mają wspólne ķrodowisko pracy. Roboty w takim systemie nie komunikują się bezpoķrednio ze sobą, ale wszystkie komunikują się z centralnym sterownikiem. Istnieją trzy ogólne schematy: nieķwiadome wspóģistnienie, ķwiadome wspóģistnienie i inteligentne wspóģistnienie. W nieķwiadomym wspóģistnieniu ŋaden z robotów nie jest ķwiadomy istnienia ŋadnego z pozostaģych. W tym sensie, gdy dwa roboty spotykają się ze sobą, kaŋda maszyna uwaŋa swój odpowiednik za przeszkodę. Większoķæ robotów mobilnych jest zaprogramowana tak, aby unikaæ przeszkód i zagroŋeņ, zachowując minimalną odlegģoķæ, powiedzmy, 1 m. Tak więc, jeķli w danym ķrodowisku jest wiele robotów i wszystkie mają nieķwiadome wspóģistnienie, zwykle trzymają się od siebie z daleka. Jeķli "gęstoķæ zaludnienia" robota jest umiarkowana do wysokiej, maszyny mają tendencję do równomiernego rozmieszczania w ķrodowisku pracy przez caģy czas. W ķwiadomym wspóģistnieniu roboty mobilne mogą odróŋniaæ przeszkody lub zagroŋenia od innych robotów. W tego typu systemach roboty są zaprogramowane tak, aby reagowaģy lub zachowywaģy się w okreķlony, ale prosty sposób w stosunku do swoich odpowiedników. Najczęstsze zachowanie polega na tym, ŋe robot wykonuje okreķlony zestaw ruchów, gdy wyczuwa bliskoķæ innego robota, a inny zestaw ruchów, gdy wyczuwa bliskoķæ nierobotycznej przeszkody lub zagroŋenia. Przykģadem moŋe byæ zatrzymanie maszyny i odwrócenie kierunku, jeķli zbliŋy się do przeszkody; ale jeķli zbliŋy się do innego robota, zatrzymuje się, czeka sekundę, a jeķli drugi robot pozostaje na drodze, skręca w prawo o 90 °, idzie 1 m, następnie skręca w lewo o 90 ° i wznawia ruch w pierwotnym kierunku. W inteligentnym wspóģistnieniu, podobnie jak w ķwiadomym wspóģistnieniu, roboty mogą rozróŋniaæ przeszkody, zagroŋenia i inne roboty, jednak zaprogramowana reakcja jest bardziej wyrafinowana. Na przykģad kaŋdy robot moŋna zaprogramowaæ tak, aby nie zbliŋaģ się do 1 m od innego robota. Jeķli takie podejķcie wystąpi, wyzwalając reakcję unikania, robot jest zaprogramowany do poruszania się w kierunku odpowiadającym ķrednim kierunkom wszystkich innych robotów w systemie. Kaŋdy robot uzyskuje te ogólne informacje od kontrolera.
COGNITIVE FATIGUE [ZMĘCZENIE POZNAWCZE]
Zmęczenie poznawcze jest formą wyczerpania psychicznego, którego doķwiadczają niekiedy uŋytkownicy systemów teleobecnoķci. Większoķæ systemów zdalnie sterowanych musi zagraŋaæ realizmowi, aby zachowaæ ograniczenia narzucone przez dostępną szerokoķæ pasma i dopuszczalny koszt. W typowym systemie teleobecnoķci kamery zwykle nie mają widzenia peryferyjnego. Opóžnienia propagacji sygnaģu mogą powodowaæ problemy z opóžnieniem (opóžnienie czasowe między dowództwem a reakcją), szczególnie gdy teleoperacja odbywa się na duŋe odlegģoķci. Rozdzielczoķæ obrazu (szczegóģy) i częstotliwoķæ odķwieŋania (liczba klatek wideo na sekundę) są ogólnie zagroŋone. Systemy audio są ogólnie lepsze niŋ systemy wideo, poniewaŋ niezbędne pasma są mniejsze, ale wraŋenia dotykowe są sģabe lub nieobecne. Objawy zmęczenia poznawczego obejmują wędrującą uwagę, sennoķæ, ból gģowy i draŋliwoķæ. Problemy te mogą powodowaæ bģędy w dziaģaniu urządzenia.
COGNIZANT FAILURE [AWARIA POZNAWCZA]
Awaria poznawcza jest cechą inteligencji maszyny, w której zawiódģ podsystem lub program jest zastępowany przez jeden na wyŋszym poziomie, przy jednoczesnym zapewnieniu, ŋe wszystkie procesy będą dziaģaģy pģynnie bez niepoŋądanych skutków ubocznych. W nieskomplikowanych systemach częķæ wysokiego poziomu systemu moŋe tymczasowo przejąæ zadania częķci niŋszego poziomu, bez względu na szczegóģy zdarzenia. W scenariuszach, w których moŋliwoķci są róŋnorodne i zmienne, czasami wymagane są pewne dodatkowe kroki proceduralne, które zwykle nie są konieczne, aby zapewniæ pģynne dziaģanie podczas naprawy urządzenia lub podsystemu niŋszego poziomu. Rozwaŋ przypadek inteligentnego domu wyposaŋonego w czujniki dymu, czujniki ciepģa, ģącze telefoniczne do straŋy poŋarnej i zestaw tryskaczy. Co powinien zrobiæ system, jeķli psotne dziecko z suszarką do wģosów uruchomi czujnik ciepģa, powodując faģszywy alarm? Niezbyt wyrafinowany system wywoģuje straŋ poŋarną i uruchamia tryskacze, powodując zakģopotanie i niepotrzebne uszkodzenie mebli. Wyrafinowany system moŋe zapobiec tym niepoŋądanym rzeczom, pod warunkiem, ŋe wģaķciciel domu lub jakiķ system wykrywania zapasowego jest obecny w celu ustalenia, ŋe faktycznie nie ma ognia. Wģaķciciel lub system zapasowy musi byæ ķwiadomy faktu, ŋe alarm jest faģszywy. Następnie system zraszaczy moŋna wyģączyæ, moŋna zadzwoniæ do straŋy poŋarnej, aby anulowaæ alarm, a czujnik wykroczenia, jeķli zostaģ uszkodzony, moŋna wyģączyæ do czasu jego wymiany. (Dziecko moŋe byæ równieŋ dyscyplinowane, chociaŋ jest to obowiązkiem wģaķciciela domu ludzkiego).
CZUJNIK KOLORU
Wiele robotycznych systemów wizyjnych dziaģa tylko w skali szaroķci. Wykrywanie kolorów moŋna dodaæ w podobny sposób, jak w telewizji (TV). Wykrywanie kolorów moŋe pomóc robotowi w okreķleniu toŋsamoķci lub charakteru obiektu. Czy obserwowana pozioma powierzchnia to podģoga czy trawiasty dziedziniec? (Jeķli jest zielony, to prawdopodobnie jest to trawiasty dziedziniec.) Czasami obiekty mają regiony o róŋnych kolorach, które mają identyczną jasnoķæ jak w systemie skali szaroķci. Takie obiekty moŋna lepiej analizowaæ za pomocą systemu rozpoznawania kolorów niŋ za pomocą systemu wizyjnego, który widzi tylko odcienie szaroķci. Rysunek pokazuje schemat blokowy systemu wykrywającego kolory. Wykorzystywane są trzy kamery w skali szaroķci. Kaŋda kamera ma filtr koloru w obiektywie. Jeden filtr jest czerwony, inny jest zielony, a drugi jest niebieski. Są to trzy podstawowe kolory promiennego ķwiatģa. Wszystkie moŋliwe odcienie, jasnoķci i nasycenia skģadają się z tych trzech kolorów w róŋnych proporcjach. Sygnaģy z trzech kamer są przetwarzane przez mikrokomputer, a wynik jest podawany do sterownika robota.
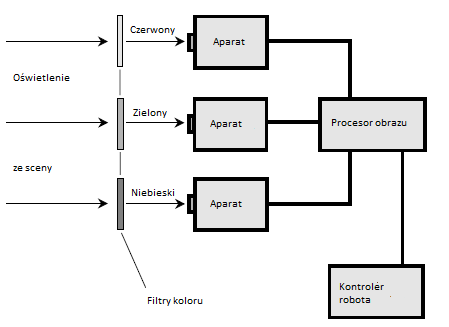
CMOS
CMOS , to nazwa technologii stosowanej w urządzeniach cyfrowych, takich jak komputery. Dwa rodzaje tranzystorów polowych (FET) pracują razem, w tandemie i w ogromnej liczbie, na jednym ukģadzie scalonym (IC). Gģównym atutem technologii CMOS w robotyce jest fakt, ŋe urządzenia mogą dziaģaæ skutecznie przy niewielkich prądach elektrycznych. Tak więc dobrze zaprojektowane obwody CMOS pobierają bardzo maģo energii z zasilacza, co pozwala na uŋycie baterii. Kolejną zaletą technologii CMOS jest to, ŋe dziaģa ona niezwykle szybko. Moŋe przetwarzaæ wiele danych w krótkim czasie. Wadą urządzeņ CMOS jest to, ŋe moŋna je ģatwo uszkodziæ przez elektrycznoķæ statyczną. Urządzenia tego typu muszą byæ przechowywane z koģkami osadzonymi w przewodzącym materiale piankowym i / lub zapakowane w specjalny plastik odporny na gromadzenie się ģadunków elektrostatycznych. Podczas konstruowania lub serwisowania urządzeņ przy uŋyciu CMOS technicy muszą zachowaæ ķrodki ostroŋnoķci, aby uniknąæ obecnoķci ģadunków elektrostatycznych na rękach i na instrumentach, takich jak sondy i lutownice. Zazwyczaj zapewnia się to fizycznie ģącząc ciaģo technika z dobrym uziemieniem elektrycznym.
COMPLEX-MOTION PROGRAMMING [PROGRAMOWANIE KOMPLEKSOWE]
Gdy maszyny stają się inteligentniejsze, programowanie staje się coraz bardziej wyrafinowane. Nie zbudowano jeszcze ŋadnej maszyny, która miaģaby inteligencję zbliŋoną do inteligencji czģowieka. Niektórzy badacze uwaŋają, ŋe prawdziwa sztuczna inteligencja (AI), na poziomie zbliŋonym do ludzkiego mózgu, nigdy nie zostanie osiągnięta. Programowanie robotów moŋna podzieliæ na poziomy, zaczynając od najmniej skomplikowanego i przechodząc do teoretycznego poziomu prawdziwej sztucznej inteligencji. Rysunek pokazuje czteropoziomowy schemat. Poziom 2, tuŋ poniŋej poziomu zadania, ale powyŋej poziomu ruchu prostego, nazywa się programowaniem ruchu zģoŋonego. Roboty na tym poziomie mogą wykonywaæ zestawy ruchów w okreķlonych sekwencjach.
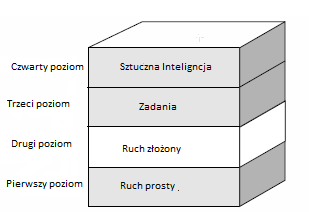
COMPLIANCE [ZGODNOĶÆ]
Zgodnoķæ to stopieņ, w jakim efektor koņcowy robota lub manipulator porusza się lub ustępuje, gdy przyģoŋona zostanie do niego siģa. Moŋna to wyraziæ jakoķciowo (uŋywając okreķleņ takich jak "spręŋysty" lub "sztywny") lub iloķciowo w kategoriach przesunięcia na jednostkę siģy (np. Milimetrów na niuton). Mówi się, ŋe robot jest zgodny, jeķli na jego ruchy mechaniczne mają wpģyw siģy zewnętrzne, w tym ciķnienie liniowe lub moment obrotowy. Zgodnoķæ moŋe występowaæ wzdģuŋ jednej, dwóch lub trzech osi lub w sensie rotacyjnym. Zasadniczo zgodny robot powinien zostaæ dostosowany, aby zachowanie jego manipulatorów i efektorów koņcowych ograniczaģo obciąŋenie jego komponentów do minimum. Jednym ze sposobów osiągnięcia tego jest czujnik przeciwciķnienia.
COMPOSITE VIDEO SIGNAL [ZĢOŊONY SYGNAĢ WIDEO]
Zģoŋony sygnaģ wideo to ksztaģt fali, który moduluje telewizor (TV) lub noķnik wideo. Zģoŋony sygnaģ zawiera inteligencję wideo, a takŋe impulsy synchronizacji, wygaszania i synchronizacji. Szerokoķæ pasma wynosi zwykle 6 MHz (6 megaherców) dla konwencjonalnych sygnaģów szybkiego skanowania i okoģo 3 kHz (3 kiloherce) dla sygnaģów wolnego skanowania. Kamera wideo, taka jak orthicon lub vidicon, wytwarza sygnaģ szybkiego skanowania. Niektóre zrobotyzowane systemy wizyjne generują i analizują zģoŋone sygnaģy wideo. Ilustracja pokazuje przebieg dla pojedynczej linii kolorowego sygnaģu obrazu. Zwykle jest 525 lub 625 linii w peģnej klatce dla standardowego szybkiego wideo. W robotycznych systemach wizyjnych zaletą jest uŋycie większej liczby linii na klatkę niŋ jest to standardowe w przypadku telewizji w celu uzyskania lepszej rozdzielczoķci obrazu.
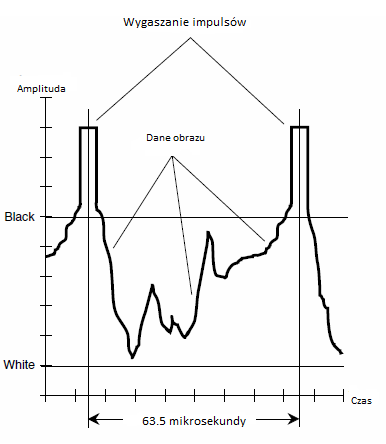
COMPUTER MAP [MAPA KOMPUTERA]
Autonomiczny robot musi mieæ wyczucie, gdzie znajduje się w stosunku do otaczających obiektów, aby nie wpadaģ na przedmioty i aby mógģ znaležæ to, czego szuka. Aby byģo to moŋliwe, kontroler robota moŋe wykonaæ komputerową mapę swojego ķrodowiska. Mapy komputerowe mogą byæ generowane za pomocą radaru, sonaru lub systemu wizyjnego. Taka mapa moŋe istnieæ w dwóch lub trzech wymiarach. Dwuwymiarową (2-D) komputerową mapę obiektów w pokoju moŋna wygenerowaæ dla pģaskiej pģaszczyzny 1 m nad podģogą. Kilka map 2-D, reprezentujących róŋne wysokoķci nad podģogą, moŋna poģączyæ, aby utworzyæ zģoŋoną mapę trójwymiarową (3-D). Bardziej zaawansowana metoda generowania trójwymiarowej mapy komputerowej polega na uŋyciu wspóģrzędnych sferycznych. Sferyczny ukģad wspóģrzędnych okreķla azymut (namiar kompasu), wysokoķæ (kąt powyŋej poziomu) i zasięg (odlegģoķæ promieniowa). Aby taka mapa speģniģa swoje zadanie, naleŋy wykonaæ setki, a nawet tysiące indywidualnych sondowaņ lub obserwacji. Te sondowania lub obserwacje powinny byæ rozmieszczone równomiernie wokóģ póģkuli powyŋej poziomu w przypadku robotów lądowych lub wokóģ peģnej kuli w przypadku robotów podwodnych, powietrznych lub kosmicznych. W przestrzeni kosmicznej naleŋy wybraæ pģaszczyznę odniesienia, która będzie sģuŋyæ jako "pozioma". Im większa liczba sondowaņ, tym lepsza jest rozdzielczoķæ mapy.
CONFIGURATION SPACE [PRZESTRZEŅ KONFIGURACJI] (C-SPACE)
Przestrzeņ konfiguracji (w skrócie C-space) to schemat, w którym lokalizacja i orientacja robota są okreķlane względem innych obiektów w jego otoczeniu. Idealnie, C-space powinna uŋywaæ minimalnej liczby wspóģrzędnych niezbędnych do wykonania tego zadania. Eliminuje to nadmiarowoķæ, która zuŋywa pamięæ kontrolera i moŋe powodowaæ zamieszanie. Zastanów się nad mobilnym robotem zaprojektowanym do dziaģania na pojedynczym piętrze budynku. Caģkowity obszar fizyczny, w którym ten robot istnieje (przestrzeņ ķwiata), jest trójwymiarowy (3-D). Stanowi to trzy stopnie swobody, które moŋna rozpatrywaæ w kategoriach wspóģrzędnych kartezjaņskich (prostokątnych) x (póģnoc / poģudnie), y (wschód / zachód) i z (góra / dóģ). Orientacja lub poģoŋenie robota moŋe wymagaæ maksymalnie trzech dodatkowych stopni swobody: p (nachylenie), r (przechylenie) i w (odchylenie). Na pģaskiej pģaszczyžnie podģogi poģoŋenie robota moŋe byæ oznaczony wspóģrzędnymi dwuwymiarowymi (2-D). W opisanym powyŋej systemie kartezjaņskim są to x i y. Jeķli jednak postawa wymaga okreķlenia kaŋdego z p, r i w, przestrzeņ C wymaga pięciu stopni swobody: x, y, p, r i w. Jednak p, r i w mogą nie wszystkie byæ waŋne w przypadku 2-D. Moŋe to jeszcze bardziej zmniejszyæ liczbę stopni swobody w przestrzeni C.
CZUJNIK KONTAKTOWY
Czujnik kontaktowy to urządzenie, które wykrywa przedmioty, przeszkody lub bariery za pomocą bezpoķredniego kontaktu fizycznego. Czujniki kontaktowe moŋna równieŋ wykorzystaæ do pomiaru przyģoŋonej siģy lub momentu obrotowego. W robotyce do takich urządzeņ naleŋą "wąsy" i czujniki ciķnienia. Prostota jest gģównym atutem wykrywania kontaktu, gdy jest uŋywana do okreķlania obecnoķci lub nieobecnoķci obiektu. W celu dokģadnego pomiaru siģy lub momentu obrotowego, zwģaszcza gdy taka siģa lub moment obrotowy muszą byæ regulowane, wymagany jest system z zamkniętą pętlą.
CONTEXT [KONTEKST]
Kontekst to ķrodowisko, w którym uŋywane jest sģowo. Jest to waŋne w systemach rozpoznawania mowy, takich jak te uŋywane w robotach osobistych lub zabezpieczających zaprojektowanych do reagowania na polecenia mówione. Wszyscy sģyszeli wyraŋenie "poza kontekstem". Kiedy sģowo jest uŋywane poza kontekstem, powstaje fraza lub zdanie, które nie mają sensu. Co gorsza, moŋe to oznaczaæ coķ, co nie jest zamierzone. w kontekķcie, fraza lub zdanie są technicznie w porządku, ale są interpretowane jako nonsens lub w niewģaķciwy sposób. Aby poprawnie interpretowaæ wypowiedzi mówione i odpowiadaæ na nie, komputer lub robot ze sztuczną inteligencją musi znaæ kontekst, w którym kaŋde sģowo jest uŋywane. Ludzie mają wrodzone poczucie kontekstu; maszyny nie. To sprawia, ŋe projektowanie i programowanie skutecznych systemów rozpoznawania mowy jest niezwykle wyrafinowanym biznesem.
CIĄGĢY RUCH
Ramię robota moŋe poruszaæ się pģynnie lub dyskretnie. Pģynne ruchy manipulatora robotów wykorzystują ruch ciągģy. Aby robot mógģ poruszaæ się po gģadkiej, ciągģej ķcieŋce, kaŋdy punkt na drodze musi teoretycznie byæ przechowywany w pamięci sterownika. Oczywiķcie nie jest to dosģownie moŋliwe, poniewaŋ ciągģa ķcieŋka zawiera nieskoņczoną liczbę punktów. Ruch ķcieŋki ciągģej wykorzystuje funkcje matematyczne, a nie zbiory punktów, do zdefiniowania chwilowej pozycji manipulatora robota. W metodzie funkcji pozycja chwilowa jest zapisywana jako zbiór funkcji matematycznych. Taki ruch jest naprawdę ciągģy, poniewaŋ faktycznie przechodzi przez nieskoņczoną liczbę punktów. Jest to moŋliwe dzięki gģadkiej naturze funkcji matematycznych. Ta zasada jest analogiem do ruchu robota grafiki wektorowej w komputerach
CONTROLLER [KONTROLER]
W robocie kontrolerem jest komputer, który nadzoruje i kontroluje obsģugę i ruch maszyny. Ilustracja jest funkcjonalnym schematem blokowym sterownika. Sercem kontrolera jest jednostka centralna (CPU), która jest podobna do CPU w komputerze osobistym. Instrukcje przemieszczania są przechowywane w pamięci o dostępie swobodnym (RAM) i / lub na noķniku pamięci, takim jak dysk twardy. Interfejs wykonuje kilka czynnoķci, a przede wszystkim pozwala mikrokomputerowi komunikowaæ się z operatorem lub przeģoŋonym. Poprzez interfejs moŋliwe jest przeprogramowanie pamięci w celu zmiany instrukcji ruchu. Repertuar dziaģaņ lub funkcji robota moŋna wyķwietliæ na ekranie monitora. Mogą równieŋ występowaæ róŋne wskažniki awarii. Niektóre z bardziej wyrafinowanych interfejsów mają okno uczenia, które pozwala operatorowi na przeprogramowanie ruchów i ķcieŋki robota.
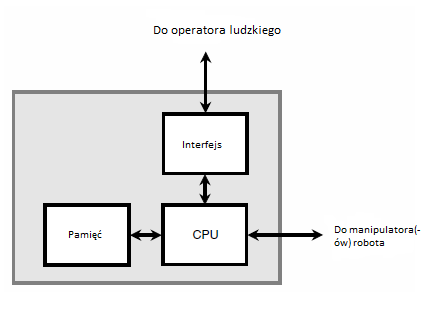
CONTROL TRADING [KONTROLA TRANSAKCJI]
Kontrola transakcji jest ograniczoną formą zrobotyzowanego zdalnego sterowania w systemie który wykorzystuje teleoperację. Operator instruuje robota, aby wykonaģ okreķlone, kompletne zadanie, takie jak odkurzanie pokoju lub koszenie trawnika. Maszyna następnie wykonuje caģe zadanie bez dalszych instrukcji lub nadzoru ze strony czģowieka. Handel kontrolny ma oczywiste aktywa. Operator nie musi stale monitorowaæ postępu pracy maszyny, chociaŋ zaleca się okresowe sprawdzanie, aby upewniæ się, ŋe nie wystąpi powaŋna awaria. W ten sposób pojedynczy operator moŋe nadzorowaæ pracę kilku robotówy w tym samym czasie. Kolejnym atutem jest fakt, ŋe opóžnienie lub opóžnienie spowodowane opóžnieniami propagacji sygnaģu nie stanowią powaŋnego problemu. Handel kontrolny jest idealny na przykģad w teleoperacji robota na Marsie lub teleoperacji międzyplanetarnej sondy kosmicznej. Jeszcze innym atutem jest to, ŋe duŋa szerokoķæ pasma sygnaģu nie jest wymagana, szczególnie w przypadku ģącza wysyģającego do maszyny; polecenia mogą skģadaæ się z zakodowanych wiadomoķci o stosunkowo maģej liczbie bajtów. Gģównym ograniczeniem handlu kontrolami jest fakt, ŋe nie moŋna oczekiwaæ, ŋe robot będzie walczyģ z nagģymi, nieprzewidzianymi zmianami w ķrodowisku pracy. Maszyna wykonuje zaprogramowany zestaw operacji przy zaģoŋeniu, ŋe ķrodowisko będzie wspóģpracowaæ. W scenariuszach, w których ķrodowisko pracy robota podlega częstym zmianom, kontrola dzielona jest na ogóģ lepsza niŋ handel kontrolami.
COOPERATION [WSPÓĢPRACA]
Wspóģpraca to konstruktywna lub synergiczna interakcja robotów w systemie. Moŋe przybieraæ róŋne formy, w zaleŋnoķci od sposobu i zakresu komunikacji robotów oraz stopnia autonomii kaŋdej maszyny. W nieaktywnej wspóģpracy roboty niekoniecznie muszą się komunikowaæ. Waŋne jest jednak, aby kaŋdy robot mógģ odróŋniæ inne roboty od ogólnych obiektów w otoczeniu. Zapobiega to niepoŋądanym warunkom, takim jak kolizje między robotami, wielu robotom próbującym wykonaæ to samo zadanie w tym samym czasie i w tym samym miejscu, oraz nierównomiernemu rozmieszczeniu maszyn w ķrodowisku pracy. Oprócz zdolnoķci do unikania konfliktów z rówieķnikami, kaŋdy robot w systemie nieaktywnym wspóģpracującym nie musi zwracaæ szczególnej uwagi na inne. W dobrze zaprojektowanym systemie tego rodzaju wspóģpraca przebiega naturalnie. W aktywnej wspóģpracy roboty mogą się wzajemnie rozpoznawaæ, a w niektórych przypadkach równieŋ komunikowaæ się ze sobą i pomagaæ sobie nawzajem. Aktywna wspóģpraca moŋe obejmowaæ "lužne", w których maszyny są ķwiadome swojego istnienia i funkcji, ale nie komunikowaæ się "ciasno", w którym kaŋdy robot moŋe komunikowaæ się z dowolnym lub wszystkimi innymi urządzeniami.Niektóre systemy moŋna zaprojektowaæ tak, aby wykazywaģy mobilnoķæ kooperacyjną, w której dwa lub więcej robotów moŋe ģączyæ się w "specjalne zespoģy", aby radziæ sobie ze zģoŋonymi lub trudnymi zadaniami, których pojedynczy robot nie moŋe wykonaæ. Specjalna forma aktywnej wspóģpracy obejmuje scentralizowane sterowanie, w którym wszystkie roboty zaleŋą od nadzoru pojedynczego kontrolera.
CORRESPONDENCE [ZGODNOĶÆ]
W dwuocznym obrazie maszynowym termin zgodnoķæ odnosi się do skupienia obu kamer wideo lub receptorów w tym samym punkcie przestrzeni. Dzięki temu percepcja wideo jest poprawna. Jeķli dwoje "oczu" nie jest skupione w tym samym punkcie, zdolnoķæ maszyny do postrzegania gģębi jest ograniczona. Ludzkie poczucie zgodnoķci moŋna zmyliæ, patrząc na siatkę kropek lub na kawaģek papieru milimetrowego. Ilustracja pokazuje dwa sposoby, w jakie ludzkie oczy lub system widzenia maszynowego moŋna oszukaæ takim wzorem. Ten problem jest ogólnie ograniczony do obserwacji regularnych wzorów kropek, kwadratów lub innych identycznych obiektów. Rzadko występuje w zģoŋonych scenach, w których ksztaģty geometryczne się nie powtarzają. Po lewej stronie na ilustracji oba czujniki wideo (pokazane jako gaģki oczne) patrzą w ten sam punkt. Tak więc gģębokoķæ jest postrzegana poprawnie, nawet jeķli widoki obiektu wydają się nieco inne z powodu róŋnicy kąta widzenia przez którykolwiek czujnik. Na rysunkach poķrodku i po prawej lewy czujnik patrzy na jeden obiekt w zestawie, podczas gdy prawy czujnik patrzy na inny. Poniewaŋ wszystkie obiekty są równomiernie rozmieszczone, wydaje się, ŋe są ustawione w jednej linii, tak jak postrzegane przez system wizyjny. Jeķli manipulator robota reaguje na te nieprawidģowe informacje, prawdopodobne są bģędy pozycjonowania.
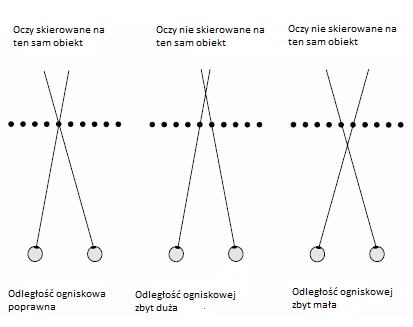
CRYPTANALYSIS [KRYPTANALIZA]
Kryptoanaliza jest sztuką przeģamywania szyfrów, które są schematami przetwarzania sygnaģów wykorzystywanymi do powstrzymywania nieupowaŋnionych osób przed przechwytywaniem komunikacji lub uzyskiwaniem dostępu do wraŋliwych danych. Za pomocą komputerów kryptoanaliza staģa się znacznie bardziej skomplikowana niŋ kiedyķ. Komputer moŋe testowaæ róŋne rozwiązania kodu znacznie szybciej niŋ zespoģy ludzkie. Poza tym moŋna zastosowaæ sztuczną inteligencję (AI), aby dowiedzieæ się, co myķli wróg. Usprawnia to proces ģamania szyfrów. Pozwala kryptoanalitykowi lub ģamaczowi kodu zapoznaæ się z ogólnym schematem szyfru, a tym samym pomaga kryptoanalitykowi zrozumieæ subtelnoķci kodu szybciej. Jednym z pierwszych kryptoanalityków korzystających z komputera byģ Alan Turing, znany jako pionier sztucznej inteligencji. Na początku lat 40. XX wieku, podczas II wojny ķwiatowej, Niemcy opracowali zaawansowaną maszynę o nazwie Enigma, która kodowaģa sygnaģy wojskowe. Maszyna i jej kody zakģócaģy alianckie kryptoanalityki, dopóki Alan Turing nie zaprojektowaģ jednego z pierwszych prawdziwych komputerów do dekodowania sygnaģów. Gdy komputery stają się coraz potęŋniejsze, mogą tworzyæ bardziej zģoŋone szyfry. Ale mogą równieŋ wymyķliæ coraz bardziej wyrafinowane schematy deszyfrowania. W wojnie przewaga szyfrowania / deszyfrowania idzie w bok dzięki bardziej zaawansowanej technologii AI.
CYBERNETYKA
Termin cybernetyka odnosi się do nauki o dąŋeniu do celu lub samoregulacji. Dziedziny robotyki i sztucznej inteligencji są specjalnoķciami w dziedzinie cybernetyki. Roboty sterowane komputerowo, które wchodzą w interakcje z ich ķrodowiskiem, to maszyny cybernetyczne. Przykģadem procesu cybernetycznego jest nalewanie filiŋanki kawy. Zaģóŋmy, ŋe ktoķ mówi do osobistego robota: "Przynieķ mi filiŋankę kawy i upewnij się, ŋe jest gorąca". W pamięci kontrolera robota znajdują się dane dotyczące wyglądu filiŋanki kawy, drogi do kuchni, ksztaģtu dzbanka do kawy oraz procedury interpretacji temperatury względnej, dzięki czemu robot wie, co osoba rozumie przez "gorący" . " Osobisty robot musi przejķæ niewiarygodnie skomplikowany proces, aby zrobiæ filiŋankę kawy. Staje się to widoczne, gdy próbuje się zapisaæ kaŋdy krok w rygorystycznej formie.
CYBORG
Sģowo cyborg jest skrótem "cybernetyczny" i "organizm". W robotyce termin odnosi się do czģowieka, którego ciaģo skģada się gģównie lub nawet gģównie z elementów robotycznych, ale który wciąŋ ŋyje biologicznie. Jeķli dana osoba otrzymuje jedną robotyczną rękę lub rękę, nazywa się to bioniczną częķcią ciaģa lub protezą. Science fiction przenosi to pojęcie do tego stopnia, ŋe osoba powaŋnie ranna moŋe zostaæ zrekonstruowana znacznie, a nawet prawie caģkowicie, z częķci bionicznych. Taka istota byģaby prawdziwym cyborgiem. Technologia jest daleka od stworzenia cyborgów, ale niektórzy naukowcy uwaŋają, ŋe kiedyķ będą powszechne. Kilku futurystów wyobraŋa sobie spoģeczeņstwo zģoŋone z ludzi, cyborgów, inteligentnych robotów i komputerów. Nazywa się to spoģeczeņstwem cybota. Podczas gdy entuzjazm dla idei spoģeczeņstwa cybota jest wysoki w Japonii, zainteresowanie USA i Europy jest nieco mniejsze. Amerykanie i Europejczycy uwaŋają roboty za sģuŋące gģównie do celów przemysģowych, ale Japoņczycy uwaŋają je za w pewnym sensie ŋywe . Byæ moŋe dlatego Japoņczycy są o wiele bardziej aktywni w opracowywaniu robotów podobnych do ludzi.
CYLINDRICAL COORDINATE GEOMETRY [CYLINDRYCZNA GEOMETRIA WSPÓĢRZĘDNYCH]
Geometria wspóģrzędnych cylindrycznych, znana równieŋ jako cykliczna geometria wspóģrzędnych, to schemat prowadzenia ramienia robota w trzech wymiarach. Cylindryczny ukģad wspóģrzędnych to ukģad biegunowy z dodatkową wspóģrzędną dodaną do elewacji. Za pomocą tego systemu pozycję punktu moŋna jednoznacznie okreķliæ w przestrzeni trójwymiarowej (3-D). W ukģadzie cylindrycznym uŋywana jest pģaszczyzna odniesienia. Punkt początkowy zostaģ wybrany, a takŋe oķ odniesienia, odbiegająca od początku w pģaszczyžnie odniesienia. W pģaszczyžnie odniesienia poģoŋenie dowolnego punktu moŋna okreķliæ pod względem zasięgu lub odlegģoķci od początku oraz obrotu podstawy, czyli kąta mierzonego w kierunku przeciwnym do ruchu wskazówek zegara od osi odniesienia. Wspóģrzędna rzędnej jest dodatnia (powyŋej pģaszczyzny odniesienia), ujemna (poniŋej niej) lub zero (w niej). Ilustracja pokazuje ramię robota wyposaŋone w cylindryczną geometrię wspóģrzędnych
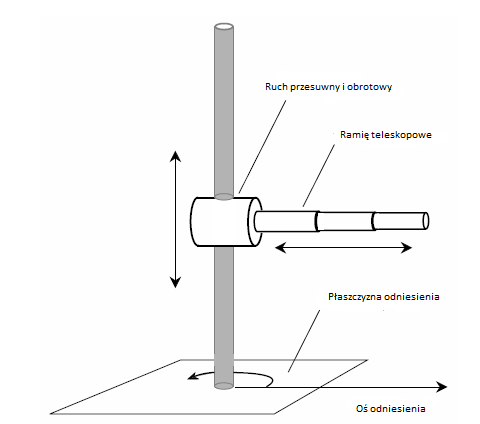
Powrót
Kompresja danych to metoda maksymalizacji iloķci informacji cyfrowych, które mogą byæ przechowywane w danym miejscu lub wysyģane w okreķlonym czasie. Pliki tekstowe i programowe moŋna skompresowaæ, zastępując często uŋywane sģowa i frazy symbolami takimi jak =, #, & lub @, o ile ŋaden z tych symboli nie występuje w nieskompresowanym pliku. Po odebraniu danych są one nieskompresowane poprzez zastąpienie oryginalnych sģów i zwrotów dla symboli. Obrazy cyfrowe moŋna kompresowaæ na dwa sposoby. W bezstratnej kompresji obrazu szczegóģy nie są poķwięcane; tylko zbędne bity są eliminowane. W stratnej kompresji obrazu niektóre szczegóģy są tracone, chociaŋ utrata zwykle nie jest znacząca. Rozmiar tekstu i programów moŋna ogólnie zmniejszyæ o okoģo 50 procent za pomocą kompresji danych. Obrazy moŋna zmniejszyæ w znacznie większym stopniu, jeķli toleruje się pewną utratę. Niektóre zaawansowane schematy kompresji obrazu mogą generowaæ plik, który jest tylko niewielkim uģamkiem oryginalnego rozmiaru pliku.
DANYCH KONWERSJA
Wiele systemów komunikacyjnych "digitalizuje" sygnaģy analogowe u žródģa (koniec nadawczy) i "rozprasza" sygnaģy w miejscu docelowym (koniec odbiorczy). Dane cyfrowe mogą byæ przesyģane bit po bicie (szeregowo) lub w pęczkach (równolegle). Konwersja danych to proces zmiany danych między formami analogowymi i cyfrowymi lub między formami równolegģymi i szeregowymi
Analogowy do cyfrowego
Kaŋdy sygnaģ analogowy lub zmienny w sposób ciągģy moŋna przeksztaģciæ w ciąg impulsów, których amplitudy mają skoņczoną liczbę stanów. Jest to konwersja analogowo-cyfrowa (A / D). Przetwornik A / D lub przetwornik ADC próbkuje chwilową amplitudę sygnaģu analogowego i wysyģa impulsy o poziomach dyskretnych, jak pokazano . Liczba poziomów nazywana jest rozdzielczoķcią próbkowania i zwykle jest potęgą 2. Liczba liczba impulsów na sekundę to częstotliwoķæ próbkowania. Czas między impulsami to interwaģ próbkowania. W tym przykģadzie istnieje osiem poziomów reprezentowanych przez trzycyfrowe liczby binarne od 000 do 111.
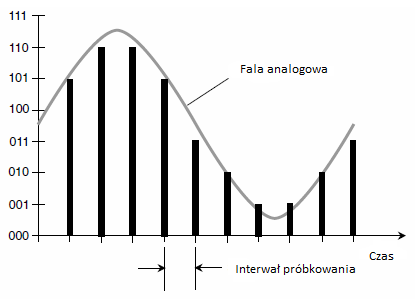
Zasadniczo minimalna moŋliwa do zrealizowania częstotliwoķæ próbkowania cyfrowego jest okoģo dwa razy większa niŋ najwyŋsza częstotliwoķæ danych analogowych. Jest to ogólna zasada w inŋynierii komunikacyjnej, znana jako twierdzenie Nyquista lub twierdzenie o próbkowaniu. Dla sygnaģu o skģadowych tak wysokich jak 3 kHz minimalna częstotliwoķæ próbkowania wynosi 6 kHz. Komercyjny standard gģosu to 8 kHz. W przypadku transmisji muzyki hi-fi standardowa częstotliwoķæ próbkowania wynosi 44,1 kHz. W systemach komunikacji maszynowej minimalna częstotliwoķæ próbkowania zaleŋy od prędkoķci, z jaką dane muszą byæ przesyģane między punktami, na przykģad z centralnego sterownika do robota mobilnego.
Cyfrowe na analogowe
Schemat konwersji cyfrowo-analogowej (D / A) zaleŋy od tego, czy sygnaģ jest binarny czy wielopoziomowy. Proces konwersji D / A odbywa się za pomocą przetwornika D / A (DAC). W binarnym przetworniku cyfrowo-analogowym mikroprocesor odwraca proces konwersji A / D wykonywany podczas nagrywania lub transmisji. Wielopoziomowe sygnaģy cyfrowe moŋna ponownie przeksztaģciæ do postaci analogowej poprzez "wygģadzenie" impulsów. Moŋna to intuicyjnie zobaczyæ na rysunku. Wyobraž sobie ciąg impulsów wygģadzony w ciągģą krzywą. Sygnaģy cyfrowe nadają się do wielokrotnego odtwarzania bez utraty integralnoķci. Sygnaģy cyfrowe są równieŋ stosunkowo odporne na wpģyw szumów w obwodach kablowych bezprzewodowych i dģugodystansowych. Z tego powodu, nawet jeķli początkowe sygnaģy wejķciowe i koņcowe sygnaģy wyjķciowe mają charakter analogowy, na przykģad ruchome obrazy lub ludzkie gģosy, zastosowanie cyfrowego format w poķredniczącym medium. Sygnaģy cyfrowe moŋna wyjaķniæ za pomocą cyfrowego przetwarzania sygnaģu (DSP) w celu zwiększenia stosunku sygnaģu do szumu (S / N), minimalizując w ten sposób liczbę bģędów komunikacji i niezbędną szerokoķæ pasma, jednoczeķnie maksymalizując szybkoķæ przesyģania danych. Dotyczy to tego, czy ostateczne sygnaģy wejķciowe i wyjķciowe są analogowe czy cyfrowe.
Szeregowy a równolegģy
Dane binarne mogą byæ wysyģane i odbierane pojedynczo po jednej linii lub kanale. To jest szeregowa transmisja danych. Wyŋsze prędkoķci danych moŋna uzyskaæ, stosując wiele linii lub kanaģ szerokopasmowy, wysyģając niezaleŋne sekwencje bitów (wysokie i niskie lub 1 i 0) wzdģuŋ kaŋdej linii lub subkanaģu. Jest to równolegģa transmisja danych. W konwersji równolegģej do szeregowej (P / S) bity są odbierane z wielu linii lub kanaģów i przesyģane pojedynczo wzdģuŋ jednej linii lub kanaģu. Bufor przechowuje bity z równolegģych linii lub kanaģów, gdy oczekują na transmisję wzdģuŋ linii lub kanaģu szeregowego. W konwersji szeregowej na równolegģą (S / P) bity są odbierane z linii szeregowej lub kanaģu i wysyģane partiami wzdģuŋ kilku linii lub kanaģów. Wyjķcie konwertera S / P nie moŋe iķæ szybciej niŋ wejķcie, ale obwód jest przydatny, gdy konieczne jest poģączenie między urządzeniem danych szeregowych a urządzeniem danych równolegģych. Rysunek 2 ilustruje obwód komunikacyjny, w którym konwerter P / S jest uŋywany u žródģa, a konwerter S / P jest uŋywany w miejscu docelowym. W tym przykģadzie znaki danych to 8-bitowe bajty; ilustracja pokazuje przeniesienie jednego znaku
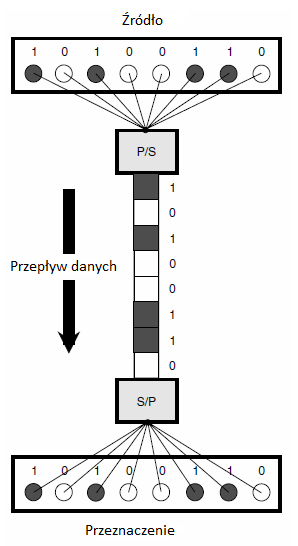
DEGREES OF FREEDOM [STOPNIE SWOBODY]
Termin stopnie swobody odnosi się do liczby róŋnych sposobów poruszania się ramienia robota. Większoķæ ramion robotów porusza się w trzech wymiarach, ale często mają więcej niŋ trzy stopnie swobody. Moŋesz uŋyæ wģasnego ramienia, aby dowiedzieæ się, jakie stopnie swobody moŋe mieæ ramię robota. Wyciągnij prawe ramię prosto w kierunku horyzontu. Wyciągnij palec wskazujący, aby wskazywaģ. Trzymając rękę prosto, odsuņ ją od ramienia. Moŋesz poruszaæ ręką na trzy sposoby. Ruch w górę i w dóģ nazywa się skokiem, a ruch w prawo i w lewo to odchyleniem. Moŋesz takŋe obróciæ caģe ramię, tak jakbyķ uŋywaģ go jako ķrubokręta; to jest roll. Twoje ramię ma trzy stopnie swobody: pochylenie, odchylenie i przechylenie. Teraz ruszaj ręką tylko z ģokcia. Jeķli stale utrzymujesz ramię i ramię w tej samej pozycji, zobaczysz, ŋe staw ģokciowy ma równowagę skoku w stawie barkowym. Ale to wszystko (chyba ŋe twój ģokieæ jest zwichnięty). Ludzki ģokieæ ma jeden stopieņ swobody. Wyciągnij rękę w kierunku horyzontu, wyprostuj ją i przesuņ tylko nadgarstek. Trzymaj ramię nad nadgarstkiem proste i nieruchome. Twój nadgarstek moŋe się zginaæ w górę i w dóģ, a takŋe moŋe przesuwaæ się na boki. Ludzka ręka ma dwa stopnie swobody w stosunku do ramienia nad nią: wysokoķæ i odchylenie. Tak więc w sumie system bark / ģokieæ / nadgarstek ma szeķæ stopni swobody: trzy w ramieniu, jeden w ģokciu i dwa w nadgarstku. Pewna iloķæ obrotów jest równieŋ moŋliwa w ramieniu poniŋej ģokcia; nie występuje to ani w stawie ģokciowym, ani w stawie nadgarstkowym, ale w samym przedramieniu. To zapewnia siódmy stopieņ swobody. Trzy stopnie swobody są wystarczające, aby doprowadziæ koniec ramienia robota do dowolnego punktu w jego obwiedni roboczej lub przestrzeni roboczej, w trzech wymiarach. Zatem teoretycznie moŋe się wydawaæ, ŋe robot nigdy nie powinien potrzebowaæ więcej niŋ trzech stopni swobody. Ale dodatkowe moŋliwe ruchy, zapewniane przez wiele poģączeņ, zapewniają wszechstronnoķæ ramion robota, których nie mogliby osiągnąæ przy zaledwie trzech stopniach swobody.
DEGREES OF ROTATION [STOPNIE OBROTU]
Stopnie obrotu są miarą stopnia, w jakim obracane jest zģącze robota lub zestaw poģączeņ robota. Zawsze uŋywany jest jakiķ punkt odniesienia, a kąty są okreķlone w stopniach lub radianach w odniesieniu do tego poģączenia. Obrót w jednym kierunku (zwykle zgodnie z ruchem wskazówek zegara) jest reprezentowany przez kąty dodatnie; obrót w przeciwnym kierunku okreķlają kąty ujemne. Zatem jeķli kąt X = 58o, odnosi się do obrotu o 58o w kierunku zgodnym z ruchem wskazówek zegara w stosunku do osi odniesienia. Jeķli kąt Y = 74o, odnosi się do obrotu o 74o w kierunku przeciwnym do ruchu wskazówek zegara. Ilustracja pokazuje ramię robota z trzema poģączeniami. Osiami odniesienia są J1, J2 i J3 dla kątów obrotu X, Y i Z. Poszczególne kąty sumują się.
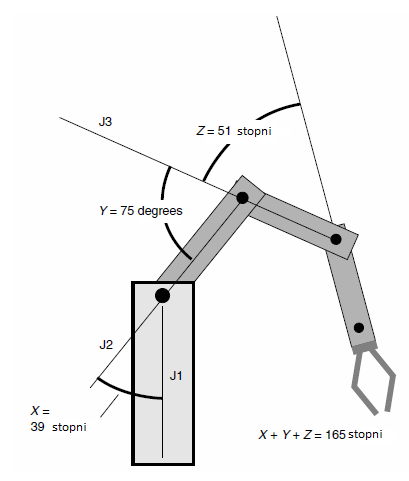
Gdy konieczne jest przesunięcie ramienia robota do okreķlonej pozycji w obrębie obwiedni roboczej lub regionu w przestrzeni, do którego ramię moŋe dotrzeæ, operator wprowadza dane do komputera. Dane te obejmują miary kątów X, Y i Z. W przykģadzie pokazanym na ilustracji operator okreķliģ X = 39o, Y = 75o i Z = 51o. Dla uproszczenia nie są pokazane ŋadne inne moŋliwe zmienne parametry, takie jak obrót podstawy, obrót nadgarstka lub przedģuŋenie / wycofanie odcinków liniowych.
DELIBERATION [PLANOWANIE]
Rozwaŋanie odnosi się do kaŋdej cechy nawigacji robotycznej, która wymaga pewnego rodzaju wczeķniejszego planowania, a nie tylko reakcji na obecnoķæ przeszkód lub zmian w ķrodowisku pracy. Planowanie deliberatywne jest zwykle ģączone z innym schematem zwanym planowaniem reaktywnym.
DEPTH MAP [MAPA GĢĘBOKOĶCI]
Mapa gģębokoķci, zwana takŋe obrazem zasięgu, jest wyspecjalizowaną formą mapy komputerowej, renderowaną jako obraz w skali szaroķci ķrodowiska pracy robota. Jasnoķæ kaŋdego piksela (elementu obrazu) na obrazie jest proporcjonalna do zasięgu lub odlegģoķci promieniowej do najbliŋszej przeszkody w okreķlonym kierunku. Na niektórych mapach gģębokoķci najjaķniejsze piksele odpowiadają krótkiemu zasięgowi; w innych najjaķniejsze piksele odpowiadają dalekiemu zasięgowi. Typowy obraz zakresu wygląda jak obraz wideo w skali szaroķci lub jego negatyw. Jednak po zbadaniu widaæ róŋnicę między konwencjonalnym obrazem widzialnym lub podczerwonym (IR) a mapą gģębi. Lokalne szczegóģy obiektów, takie jak kontur ludzkiej twarzy, na ogóģ nie pokazują się na mapie gģębokoķci, nawet jeķli cieņ, kolor lub promieniowanie cieplne róŋnią się znacznie. Jest to odlegģoķæ promieniowa okreķlona przez system wykrywania i kreķlenia zasięgu, który wytwarza obraz. Zaģóŋmy, ŋe robot porusza się po pģaskim polu lub pustym parkingu, na którym stoi ogromna kula. System wykrywania i kreķlenia zasięgu jest zaprogramowany do tworzenia mapy gģębokoķci. W polu widzenia systemu jedynymi pojawiającymi się obiektami są pģaska powierzchnia i kula. Zaģóŋmy, ŋe mapa gģębokoķci jest taka, ŋe względna jasnoķæ obrazu jest odwrotnie proporcjonalna do odlegģoķci promieniowej.

Mapa gģębokoķci wygląda tak, jak pokazano na zaģączonej ilustracji. Kolor piģki i powierzchnia, na której spoczywa, oraz pora dnia i nocy, nie mają znaczenia; interpretacja opiera się caģkowicie na zakresie jako funkcji kierunku w przestrzeni trójwymiarowej.
DERIVATIVE [POCHODNA]
Termin pochodna odnosi się do tempa zmiany funkcji matematycznej. Na przykģad prędkoķæ lub szybkoķæ jest pochodną przemieszczenia, a przyspieszenie jest pochodną prędkoķci. Ryc. 1 pokazuje hipotetyczny wykres przemieszczenia w funkcji czasu. Ta funkcja pojawia się jako krzywa. Moŋesz myķleæ o tym jak o wykresie odlegģoķci przebytej przez robota przyspieszającego wzdģuŋ toru liniowego, z przesunięciem okreķlonym w metrach i czasem w sekundach. W dowolnym momencie, nazwij to t, prędkoķæ jest równa nachyleniu linii stycznej do krzywej w tym momencie. Ta iloķæ jest wyraŋana w liniowych jednostkach przemieszczenia (takich jak metry) na sekundę.
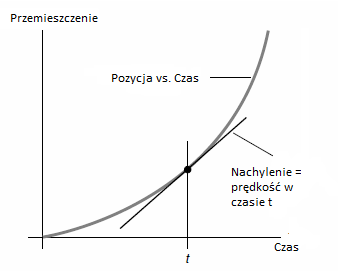
W elektronice cyfrowej obwód, który nieustannie przyjmuje pochodną jako falę wejķciową, jako funkcja chwilowej amplitudy w funkcji czasu, nazywana jest czynnikiem róŋnicującym. Przykģad dziaģania róŋniczki pokazano poiŋej. Sygnaģem wejķciowym jest fala sinusoidalna. Wyjķcie jest zgodne ze spadkiem lub pochodną tej fali; wynikiem jest fala cosinusowa, o tym samym ksztaģcie co fala sinusoidalna, ale przesunięta o jedną czwartą cyklu (90o fazy).
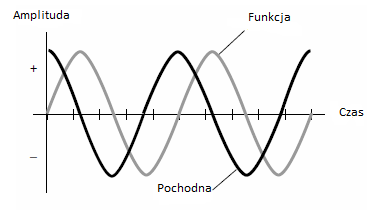
DIFFERENTIAL AMPLIFIER [WZMACNIACZ RÓŊNICOWY]
Wzmacniacz róŋnicowy to obwód elektroniczny, który reaguje na róŋnicę amplitudy między dwoma sygnaģami. Niektóre wzmacniacze róŋnicowe równieŋ wytwarzają wzmocnienie, w wyniku czego powstaje sygnaģ wyjķciowy, którego amplituda zmienia się dramatycznie, gdy amplituda obu sygnaģów wejķciowych zmienia się tylko nieznacznie. Moc wyjķciowa jest proporcjonalna do róŋnicy między poziomami sygnaģu wejķciowego. Jeķli amplitudy wejķciowe są identyczne, wówczas wartoķæ wyjķciowa wynosi zero. Nomograf pokazuje, jak zmienia się chwilowa moc wyjķciowa wzmacniacza róŋnicowego wraz ze zmianą chwilowych wartoķci wejķciowych. Aby znaležæ wynik, umieķæ prostą linijkę, tak aby jego krawędž przechodziģa przez dwa punkty wejķciowe; wyjķcie to punkt na ķrodkowej skali, przez który przechodzi linijka. W tym przykģadzie obwód nie ma wzmocnienia. Wzmacniacze róŋnicowe są czasami stosowane w robotycznych systemach czujników. Wyjķcie wzmacniacza w tej sytuacji moŋe byæ wykorzystane jako sygnaģ bģędu, który jest wysyģany do systemu prowadzenia w celu regulacji ruchu robota mobilnego. Moŋe to zapewniæ, ŋe robot podąŋa wyznaczoną trasą w swoim ķrodowisku pracy, na przykģad ķcieŋką, wzdģuŋ której dwie referencyjne fale akustyczne lub radiowe są dokģadnie w fazie
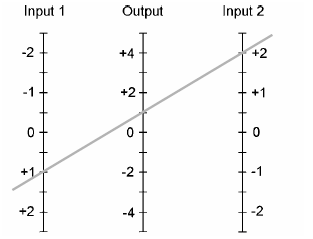
DIFFERENTIAL TRANSDUCER [PRZETWORNIK RÓŊNICOWY]
Przetwornik róŋnicowy jest czujnikiem z dwoma wejķciami i jednym wyjķciem. Moc wyjķciowa jest proporcjonalna do róŋnicy między poziomami sygnaģu wejķciowego. Przykģadem jest przetwornik róŋnicy ciķnieņ, który reaguje na róŋnicę ciķnienia mechanicznego w dwóch punktach. Dowolną parę przetworników moŋna podģączyæ w ukģadzie róŋnicowym. Zwykle wymaga to podģączenia przetworników do wejķæ wzmacniacza róŋnicowego. Gdy dwie zmienne mają tę samą wielkoķæ, wyjķcie przetwornika róŋnicowego wynosi zero. Im większa róŋnica wielkoķci wykrywanych efektów, tym większa jest wydajnoķæ. Najwięcej wyników występuje, gdy jeden z wykrytych efektów jest intensywny, a drugi jest zerowy lub bliski zeru. Niezaleŋnie od tego, czy wynik jest dodatni czy ujemny, zaleŋy od tego, który z wykrytych efektów jest większy.
DIGITAL IMAGE [OBRAZ CYFROWY]
Obraz cyfrowy, zwany takŋe obrazem digitalizowanym, jest odwzorowaniem sceny o dģugoķciach fal widzialnych, podczerwonych (IR) lub ultrafioletowych (UV) lub za pomocą radaru lub sonaru, w postaci prostokątnego ukģadu maģych kwadratów lub kropek zwanych piksele. Na obrazie cyfrowym w skali szaroķci kaŋdy piksel ma poziom jasnoķci, który moŋe osiągnąæ dowolną z wielu dyskretnych wartoķci binarnych. Typowe zakresy to od binarnych od 0000 do 1111 (16 odcieni szaroķci) lub binarnych od 00000000 do 11111111 (256 odcieni szaroķci). Na kolorowym obrazie cyfrowym kaŋdy piksel ma wartoķæ koloru czerwonego, zielonego lub niebieskiego (RGB), a takŋe poziom jasnoķci, który moŋe osiągnąæ dowolną z wielu dyskretnych wartoķci binarnych. Kolorowe obrazy cyfrowe zajmują znacznie więcej pamięci lub miejsca do przechowywania danych niŋ obrazy cyfrowe w skali szaroķci, poniewaŋ trzy wartoķci kolorów mogą róŋniæ się niezaleŋnie dla kaŋdego piksela. Liczba pikseli na obrazie cyfrowym okreķla rozdzielczoķæ. Liczba ta jest ogólnie reprezentowana przez liczbę pikseli w wymiarze poziomym i pionowym. Na przykģad na ekranie komputera powszechna rozdzielczoķæ to 1024 768 (1024 piksele w poziomie i 768 pikseli w pionie). Na widocznym obrazie cyfrowym kolor jest zazwyczaj odwzorowywany w moŋliwie najbardziej realistyczny sposób, jednak przy dģugoķciach fal IR i UV, a zwģaszcza w przypadku radaru i sonaru, w obrazach cyfrowych często stosowane są faģszywe kolory. Na przykģad na obrazie sonaru kolor moŋe reprezentowaæ zasięg lub odlegģoķæ między robotem a obiektami w jego ķrodowisku pracy. Czerwony moŋe reprezentowaæ najmniejszy zakres, przechodząc w górę przez pomaraņczowy, ŋóģty, zielony, niebieski, fioletowy, a na koniec biaģy, reprezentując największy (lub nieskoņczony) zasięg.
DIGITAL MOTION [RUCH CYFROWY]
W robotyce ruch cyfrowy odnosi się do ruchu ramienia robota, który moŋe zatrzymaæ się tylko w niektórych pozycjach w obrębie obwiedni roboczej. Kontrastuje to z ruchem analogicznym, w którym liczba moŋliwych pozycji jest teoretycznie nieskoņczona. Moŋliwe pozycje w systemie zawierającym ruch cyfrowy muszą zostaæ zaprogramowane w sterowniku robota. Na przykģad podstawa ramienia robota moŋe obracaæ się do dowolnej wielokrotnoķci 30o w caģym okręgu od 0o do 360o. Umoŋliwia to 12 unikalnych kątów obrotu podstawy. Jeķli wymagana jest większa precyzja, moŋna zwiększyæ przyrost kąta (10o pozwoli na przykģad na 36 unikalnych kątów obrotu podstawy). Gdy ramię robota musi zostaæ obrócone do okreķlonej pozycji kąta podstawy, naleŋy wprowadziæ ŋądany kąt lub stopieņ do kontrolera robota. Ramię następnie przesuwa się do wyznaczonej pozycji i zatrzymuje się. Silniki krokowe są powszechnie stosowane w robotycznych systemach ruchu cyfrowego. Silniki te poruszają się w dyskretnych przyrostach, zamiast obracaæ się w sposób ciągģy.
DIGITAL SIGNAL PROCESSING (DSP) [CYFROWE PRZETWARZANIE SYGNAĢÓW (DSP)]
Cyfrowe przetwarzanie sygnaģu (DSP) to schemat poprawy dokģadnoķci danych cyfrowych. Moŋna go wykorzystaæ do wyjaķnienia lub wzmocnienia wszelkiego rodzaju sygnaģów.
Czyszczenie analogowe
Gdy DSP jest uŋywany w analogowym systemie komunikacyjnym, sygnaģ jest najpierw zmieniany na postaæ cyfrową poprzez konwersję A / D. Następnie sygnaģ cyfrowy jest "uporządkowany", więc czas impulsu i amplituda są ķciķle zgodne z protokoģem. Na koniec sygnaģ cyfrowy jest zmieniany z powrotem na postaæ analogową za pomocą konwersji cyfrowo-analogowej. Cyfrowe przetwarzanie sygnaģu moŋe rozszerzyæ funkcjonalny zasięg obwodu komunikacyjnego, poniewaŋ umoŋliwia odbiór w gorszych warunkach niŋ byģoby to moŋliwe bez niego. Cyfrowe przetwarzanie sygnaģu poprawia takŋe jakoķæ uczciwych sygnaģów, więc sprzęt odbiorczy lub operator popeģni mniej bģędów. Proces DSP zapewnia równieŋ, ŋe niezbędna przepustowoķæ komunikacji jest ograniczona do minimum.
Cyfrowe porządki
W obwodach, które uŋywają tylko trybów cyfrowych, konwersja A / D i D / A nie ma znaczenia, ale DSP moŋe jednak "uporządkowaæ" sygnaģ. Zwiększa to dokģadnoķæ systemu, a takŋe umoŋliwia wielokrotne kopiowanie danych (czyli tworzenie kopii wielopokoleniowych). Obwód DSP minimalizuje zamieszanie między stanami cyfrowymi, jak pokazano na ilustracji. Sygnaģ hipotetyczny przed przetwarzaniem pokazano na górze; sygnaģ po przetworzeniu jest pokazany na dole. Jeķli amplituda wejķciowa przez pewien czas przekracza okreķlony poziom, sygnaģ wyjķciowy jest wysoki (logika 1).
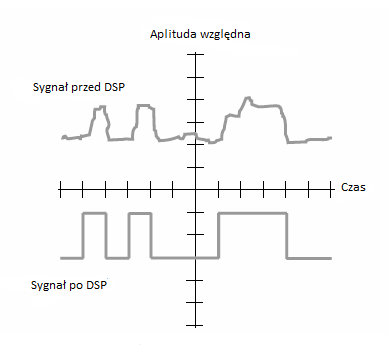
Jeķli amplituda wejķciowa znajduje się poniŋej punktu krytycznego przez pewien czas, wówczas sygnaģ wyjķciowy jest niski (logiczne 0). Silny wybuch szumu moŋe oszukaæ obwód w przekonaniu, ŋe sygnaģ jest wysoki, gdy jest naprawdę niski; ale ogólnie bģędy występują rzadziej w przypadku DSP niŋ bez niego.
W komputerach i robotach.
System DSP moŋna wytrawiæ na jednym ukģadzie scalonym (IC), podobnym rozmiarem do ukģadu pamięci. Niektóre obwody DSP peģnią wiele funkcji w systemie komputerowym lub zrobotyzowanym, więc kontroler moŋe poķwięciæ się wykonywaniu swojej podstawowej pracy bez koniecznoķci wykonywania dodatkowych zadaņ. Ukģad DSP moŋe kompresowaæ i dekompresowaæ dane, pomagaæ komputerowi rozpoznawaæ i generowaæ mowę, tģumaczyæ z jednego mówionego języka na inny (na przykģad z angielskiego na chiņski lub odwrotnie) oraz rozpoznawaæ i porównywaæ wzorce.
DIRECTIONAL TRANSDUCER [PRZETWORNIK KIERUNKOWY]
Przetwornik kierunkowy jest urządzeniem, które wykrywa pewien efekt lub zakģócenie i wytwarza sygnaģ wyjķciowy, którego amplituda jest róŋna w zaleŋnoķci od kierunku, z którego dochodzi efekt lub zakģócenie. Przetworniki kierunkowe są szeroko stosowane w robotycznych systemach wykrywania i prowadzenia. Prostym przykģadem przetwornika kierunkowego jest wspólny mikrofon. Mikrofony prawie zawsze są jednokierunkowe, to znaczy najlepiej reagują w jednym kierunku. Przykģadem dwukierunkowego przetwornika jest pozioma antena radiowa znana jako dipol. Niektóre przetworniki są dookólne w okreķlonej pģaszczyžnie. Przykģadem jest pionowa antena radiowa. Dziaģa równie dobrze we wszystkich kierunkach poziomych. Jednak jego czuģoķæ zmienia się w pģaszczyznach pionowych. Niektóre przetworniki są jednakowo czuģe we wszystkich moŋliwych kierunkach; kierunkowy wzór takiego urządzenia to kula w trzech wymiarach. To jest naprawdę dookólny przetwornik.
DIRECTION FINDING [USTALENIE KIERUNKU]
Znalezienie kierunku jest ķrodkiem lokalizacji i / lub nawigacji, zwykle wykorzystującym fale radiowe lub akustyczne. Na częstotliwoķciach radiowych (RF) systemy lokalizacji i nawigacji dziaģają w zakresie od kilku kiloherców do obszaru mikrofalowego. Systemy akustyczne wykorzystują częstotliwoķci od kilkuset herców do kilkuset kiloherców.
Porównanie sygnaģów
Robot mobilny moŋe znaležæ swoją pozycję, porównując sygnaģy z dwóch staģych stacji, których pozycje są znane, jak pokazano na rysunku. Dodając 180o do ģoŋysk žródeģ X i Y, robot (kwadrat) uzyskuje swoje ģoŋyska jako "Widziane" ze žródeģ (kropki). Robot moŋe okreķliæ swój kierunek i prędkoķæ, wykonując dwa odczyty oddzielone okreķloną iloķcią czasu. Komputery mogą pomóc w dokģadnym okreķleniu i wyķwietleniu poģoŋenia i wektora prędkoķci.
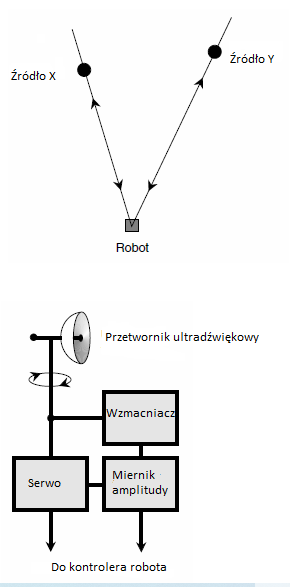
Drugi rysunek przedstawia schemat blokowy akustycznej wyszukiwarki kierunku. W tym przypadku fale akustyczne są ultradžwiękami. Odbiornik ma wskažnik siģy sygnaģu i serwo, które obraca kierunkowy przetwornik ultradžwiękowy. Istnieją dwa žródģa sygnaģu o róŋnych częstotliwoķciach. Gdy przetwornik jest obracany, aby sygnaģ z jednego žródģa byģ maksymalny, ģoŋysko uzyskuje się przez porównanie orientacji przetwornika z pewnymi znanymi standardami, takimi jak odczyt kompasu magnetycznego. To samo dotyczy drugiego žródģa. Komputer uŋywa triangulacji, aby ustaliæ dokģadną lokalizację robota.
Wyszukiwanie kierunku radiowego (RDF)
DIRECTION RESOLUTION [ROZDZIELCZOĶÆ KIERUNKOWA]
Rozdzielczoķæ kierunkowa odnosi się do zdolnoķci robota do oddzielania dwóch obiektów, które wydają się, z punktu widzenia robota, leŋeæ w prawie tym samym kierunku. Rozdzielczoķæ kierunku na powierzchni Ziemi nazywana jest równieŋ rozdzielczoķcią azymutu. Iloķciowo jest okreķlony w stopniach, minutach lub sekundach kątowych. Dwa obiekty mogą byæ tak blisko w tym samym kierunku, ŋe robot "widzi" je jako jeden i ten sam obiekt, ale jeķli znajdują się w róŋnych odlegģoķciach promieniowych, robot moŋe je rozdzieliæ na podstawie pomiaru odlegģoķci.
DISPLACEMENT ERROR [BĢĄD PRZESUNIĘCIA]
Bģąd przesunięcia odnosi się do niedokģadnoķci poģoŋenia robota, która ma miejsce w czasie. Bģąd przesunięcia moŋna zmierzyæ w wartoķciach bezwzględnych, takich jak jednostki liniowe lub stopnie ģuku. Moŋna to równieŋ zmierzyæ jako procent caģkowitego przesunięcia lub obrotu. Przykģadowo, zaģóŋmy, ŋe robot mobilny jest zaprogramowany do dziaģania z prędkoķcią 1500 metrów na sekundę (m / s) przy azymucie wynoszącym 90,00o (na wschód) na pģaskiej powierzchni. Po 10 s moŋna oczekiwaæ, ŋe ten robot wyniesie 15,00 m na wschód od swojej pozycji początkowej. Jeķli robot napotka nachylenie w górę, przemieszczenie moŋe byæ mniejsze niŋ 15,00 m; jeķli robot napotka opadanie, przemieszczenie moŋe byæ większe. Jeķli powierzchnia przechyla się w lewo lub w prawo, moŋna oczekiwaæ, ŋe kierunek ruchu zmieni się, powodując, ŋe robot znajdzie się na póģnocy lub poģudniu swojej pozycji, gdyby poruszaģ się po pģaskiej powierzchni. W idealnym scenariuszu nieregularnoķæ terenu nie wpģynie na prędkoķæ ani kierunek
maszyny; bģąd przesunięcia wyniósģby zatem zero. Bģędy przesunięcia mogą wynikaæ z kumulacji bģędu kinematycznego w czasie.
DISPLACEMENT TRANSDUCER [PRZETWORNIK PRZEMIESZCZENIA]
Przetwornik przemieszczenia jest urządzeniem, które mierzy przebytą odlegģoķæ lub kąt lub odlegģoķæ lub kąt oddzielające dwa punkty. Niektóre przetworniki przemieszczenia przeksztaģcają prąd elektryczny lub sygnaģ w ruch na pewną odlegģoķæ lub kąt. Przetwornik mierzący odlegģoķæ w linii prostej jest przetwornikiem przemieszczenia liniowego. Jeķli mierzy kąt, jest to przetwornik przesunięcia kątowego. Zaģóŋmy, ŋe chcesz, aby ramię robota obracaģo się o 28o w pģaszczyžnie poziomej - nie więcej i nie mniej. Wydajesz polecenie kontrolerowi robota, np. "BR = 28" (obrót podstawy = 28o). Sterownik wysyģa sygnaģ do ramienia robota, aby obracaģ się zgodnie z ruchem wskazówek zegara. Przetwornik przemieszczenia kątowego ķledzi kąt obrotu, wysyģając sygnaģ z powrotem do komputera. Sygnaģ ten roķnie liniowo w stosunku do kąta obrotu ramienia. Wydając polecenie "BR = 28", mówisz kontrolerowi dwie rzeczy:
1. Rozpocznij obracanie podstawy ramienia.
2. Zatrzymaj obrót, gdy ramię obróci się o 28o.
Drugi element polecenia okreķla poziom progowy dla sygnaģu powrotnego. Gdy sygnaģ z przetwornika przemieszczenia roķnie, osiąga ten próg przy 28o obrotu. Sterownik jest zaprogramowany do zatrzymania uzbrojenia w tym momencie. Istnieją inne sposoby na poruszenie ramienia robota, oprócz uŋycia przetworników przemieszczenia. Powyŋej jest tylko jednym przykģadem tego, jak taki przetwornik moŋe byæ uŋyty w systemie robotycznym.
DISTANCE MEASUREMENT [POMIAR ODLEGĢOĶCI]
Pomiar odlegģoķci, zwany takŋe okreķlaniem odlegģoķci, jest schematem, za pomocą którego autonomiczny robot moŋe nawigowaæ w swoim ķrodowisku pracy. Pozwala takŋe centralnemu komputerowi ķledziæ lokalizację robotów owadowych. Autonomiczny robot moŋe mierzyæ odlegģoķæ między sobą a jakimķ obiektem na kilka sposobów. Sonar wykorzystuje džwięk lub ultradžwięki, odbijając fale od przedmiotów wokóģ robota i mierząc czas powrotu fal. Jeķli robot wyczuje, ŋe opóžnienie echa jest wyjątkowo krótkie, wie, ŋe zbliŋa się do czegoķ. Fale akustyczne rozprzestrzeniają się z prędkoķcią okoģo 335 m / s w suchym powietrzu na poziomie morza. Radar dziaģa jak sonar, ale wykorzystuje mikrofalowe sygnaģy radiowe, a nie fale džwiękowe. Moŋna równieŋ zastosowaæ wiązki ķwiatģa, zwģaszcza lasery, w którym to przypadku schemat nazywa się ladar. Jednak radio i wiązki ķwiatģa poruszają się z tak duŋą prędkoķcią (300 milionów m / s w wolnej przestrzeni), ŋe trudno jest zmierzyæ czasy opóžnienia pobliskich obiektów. Ponadto niektóre obiekty sģabo odbijają fale ķwietlne, co utrudnia uzyskanie ech wystarczająco silnych, aby umoŋliwiæ pomiar odlegģoķci. Stadimetria okreķla odlegģoķæ do obiektu o znanej wysokoķci, szerokoķci lub ķrednica poprzez pomiar kąta, pod jakim obiekt się znajduje w polu widzenia systemu wizyjnego. Do pomiaru odlegģoķci moŋna uŋywaæ róŋnych sygnaģów nawigacyjnych. Urządzenia te mogą korzystaæ z džwięku, fal radiowych lub fal ķwietlnych.
DISTANCE RESOLUTION [ROZDZIELCZOĶÆ ODLEGĢOĶCI]
Rozdzielczoķæ odlegģoķci jest precyzją zrobotyzowanego systemu dla pomiaru odlegģoķci. Jakoķciowo jest to zdolnoķæ systemu do rozróŋniania dwóch obiektów, które są prawie, ale nie caģkiem, w tej samej odlegģoķci od robota. Iloķciowo moŋna go zmierzyæ w metrach, centymetrach, milimetrach, a nawet w mniejszych jednostkach. Gdy dwa obiekty są bardzo blisko siebie, mierząc odlegģoķæ, system widzi je jako pojedynczy obiekt. W miarę oddalania się obiektów stają się one rozpoznawalne. Minimalna radialna separacja obiektów, aby system dystansowy odróŋniaģ je od siebie, to rozdzielczoķæ odlegģoķci. W przypadku niektórych systemów pomiaru odlegģoķci, pobliskie zestawy obiektów moŋna rozwiązaæ lepiej niŋ zestawy obiektów znajdujących się daleko. Zaģóŋmy, ŋe dwa obiekty są rozdzielone promieniowo o 1 m. Jeķli ich ķrednia (ķrednia) odlegģoķæ wynosi 10 m, ich odlegģoķæ wynosi 1/10 (10 procent) ķredniej odlegģoķci. Jeķli ich ķrednia odlegģoķæ wynosi 1000 m, ich odlegģoķæ wynosi 1/1000 (0,1 procent) ķredniej odlegģoķci. Jeķli rozdzielczoķæ odlegģoķci wynosi 1 procent ķredniej odlegģoķci, wówczas system moŋe odróŋniæ bliŋszą parę obiektów od siebie, ale nie więcej. Rozdzielczoķæ odlegģoķci zaleŋy od rodzaju zastosowanego systemu okreķlania odlegģoķci. Najbardziej czuģe metody porównują fazy frontów fal emitowanych przez wiązki laserowe. Fale te przybywają z lub są odbijane przez latarnie zlokalizowane w strategicznych punktach ķrodowiska pracy. Wysokiej klasy system tego rodzaju moŋe rozwiązywaæ odlegģoķci do niewielkiej częķci milimetra.
DISTINCTIVE PLACE [WYRÓŊNIONE MIEJSCE]
Charakterystycznym miejscem jest punkt w ķrodowisku pracy robota mobilnego, który ma szczególne znaczenie lub moŋe byæ wykorzystany jako punkt odniesienia do celów nawigacyjnych. Punkty takie są okreķlane na podstawie cech okreķlonych regionów, zwanych dzielnicami, w ķrodowisku pracy. Zaģóŋmy, ŋe robot mobilny zostaģ zaprojektowany do dziaģania na jednym poziomie budynku biurowego. Ķrodowisko pracy to caģa podģoga (zestaw wszystkich punktów), po której maszyna moŋe się poruszaæ. Kaŋdy pokój moŋna uznaæ za sąsiedztwo. Wyróŋniające miejsca mogą byæ zdefiniowane jako ķrodki drzwi między sąsiednimi pokojami lub między kaŋdym pokojem a korytarzem. Charakterystyczne miejsca mogą równieŋ obejmowaæ fizyczny (geograficzny) ķrodek podģogi w kaŋdym pomieszczeniu lub punkt na podģodze, który leŋy w największej odlegģoķci, w danym pomieszczeniu, od staģych przeszkód. Sygnaģy nawigacyjne mogą równieŋ sģuŋyæ jako charakterystyczne miejsca.
DISTRIBUTED CONTROL [KONTROLA ROZPROSZONA]
W systemie zawierającym więcej niŋ jednego robota sterowanie rozproszone odnosi się do niezaleŋnoķci jednostki. W systemie robotycznym, który wykorzystuje sterowanie rozproszone, znane równieŋ jako sterowanie zdecentralizowane, kaŋdy robot we flocie moŋe do pewnego stopnia podejmowaæ wģasne decyzje i dziaģaæ bez instrukcji innych robotów lub centralnego sterownika. Jeķli istnieje sterownik centralny, jego funkcja jest ograniczona. Ten typ systemu robotycznego jest analogiczny do sieci komputerowej peer-to-peer. W systemie robotycznym, który wykorzystuje równomiernie rozģoŋone sterowanie, nie ma gģównego sterownika; kaŋdy robot jest w peģni autonomiczny i zawiera wģasny kontroler. Kaŋda jednostka ma znaczenie dla wszystkich pozostaģych. W niektórych systemach istnieje gģówny kontroler, który nadzoruje niektóre operacje kaŋdej jednostki we flocie. Jest to znane jako kontrola częķciowo rozproszona. Innym przykģadem częķciowo rozproszonego sterowania jest system, w którym kaŋdy robot otrzymuje zestaw instrukcji od sterownika centralnego, przechowuje te instrukcje, a następnie wykonuje je niezaleŋnie od sterownika centralnego. W niektórych systemach robotycznych poszczególne jednostki są caģkowicie i stale zaleŋne od centralnego sterownika i nie mogą dziaģaæ, jeķli poģączenie komunikacyjne zostanie przerwane. Mówi się, ŋe taki system wykorzystuje w peģni scentralizowaną kontrolę
DOMENA FUNKCJI
Dziedziną funkcji matematycznej jest zbiór wartoķci zmiennych niezaleŋnych, dla których funkcja jest zdefiniowana. Kaŋdy x w dziedzinie funkcji f jest odwzorowywany przez f na okreķloną, pojedynczą wartoķæ y. Ŋadne x poza domeną nie jest mapowane na nic przez funkcję f. Zaģóŋmy, ŋe otrzymujesz funkcję f (x) = + x 1/2 (to znaczy dodatni pierwiastek kwadratowy z x). Wykres tej funkcji pokazano na ilustracji. Funkcja nie jest zdefiniowana dla ujemnych wartoķci x, a takŋe nie jest zdefiniowana, jak pokazano w tym konkretnym przykģadzie, dla x = 0. Funkcja f (x) ma wartoķci y wtedy i tylko wtedy, gdy x 0. Dlatego teŋ dziedziną f jest zbiór dodatnich liczb rzeczywistych. Komputery pracują intensywnie z funkcjami, zarówno analogowymi, jak i cyfrowymi. Funkcje są waŋne w robotycznych systemach nawigacji, lokalizacji i pomiarów.
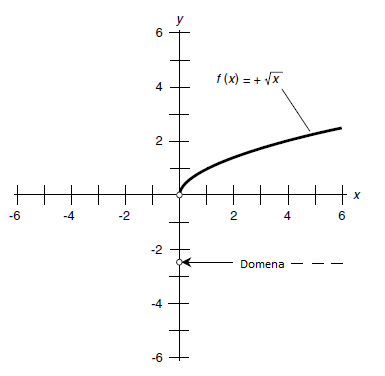
DROP DELIVERY
Dostarczanie kropli jest prostą metodą, za pomocą której za pomocą robotycznego efektora koņcowego moŋna umieķciæ obiekt na miejscu. Obiekt jest chwytany przez chwytak, a następnie przesuwany, aŋ znajdzie się bezpoķrednio nad szczeliną, otworem, taķmą przenoķnika, rynną lub innym przeznaczonym do tego pojemnikiem. Następnie chwytak puszcza przedmiot i wpada na miejsce. Dostarczanie kropli wymaga precyzji ruchu ramienia robota i efektora koņcowego. Ponadto, gdy chwytak puszcza przedmiot, nie moŋe on przekazywaæ przedmiotu znacznej siģy bocznej ani momentu obrotowego. W przeciwnym razie obiekt moŋe się wyrównaæ lub przewróciæ. Jeŋeli stosowana jest taķma przenoķnikowa, naleŋy zastosowaæ pewne ķrodki, aby zapewniæ, ŋe ruch taķmy nie spowoduje poķlizgnięcia się, przewrócenia lub odpadnięcia taķmy po wylądowaniu.
DUTY CYCLE [CYKL PRACY]
Cykl pracy to proporcja czasu, w którym pracuje obwód, maszyna lub element. Zaģóŋmy, ŋe silnik pracuje przez 1 minutę, następnie jest wyģączany na 2 minuty, a następnie jest ponownie uruchamiany przez 1 minutę i tak dalej. Dlatego silnik pracuje 1 na 3 minuty lub jedną trzecią czasu. Jego cykl pracy wynosi zatem 1?3, czyli 33 procent. Jeŋeli urządzenie jest obserwowane przez dģuŋszy czas to, a przez ten czas dziaģa przez caģy czas t (w tych samych jednostkach to), wówczas cykl pracy wyraŋony w procentach, d%, jest okreķlony następującym wzorem :
d% = 100 . t0
Przy okreķlaniu cyklu pracy waŋne jest, ŋe obserwacja czasu będzie wystarczająco dģuga. W przypadku silnika opisanego powyŋej dowolna wartoķæ mniejsza niŋ 3 minuty jest zbyt krótka, aby uzyskaæ peģną próbkę danych. Idealnie czas obserwacji powinien byæ co najmniej dwa razy dģuŋszy niŋ czas wymagany do peģnego cyklu aktywnoķci. Jeķli cykl aktywnoķci nieco się róŋni (częsta sytuacja), czas obserwacji musi byæ znacznie dģuŋszy niŋ czas wymagany dla pojedynczego cyklu. Im częķciej uŋywany jest obwód, maszyna lub komponent, tym szybciej się zuŋyje, jeķli wszystkie inne czynniki zostaną utrzymane na staģym poziomie. Zasadniczo im wyŋszy cykl pracy, tym krótszy jest okres uŋytkowania. Ten efekt jest najbardziej wyražny gdy urządzenie pracuje blisko swoich granic. Ponadto, ocena urządzenia często zaleŋy od cyklu pracy, w którym ma byæ uŋywany. Zaģóŋmy, ŋe silnik opisany powyŋej ma wartoķæ momentu obrotowego 10 niutonów (10 N⋅m) dla cyklu pracy równego 100 procent. Jeŋeli silnik zostanie wezwany do zapewnienia staģego momentu obrotowego 9,9 N⋅m, zostanie opodatkowany do maksimum. Jeķli musi stale obracaæ ģadunek o wartoķci 12 N⋅m, nie powinno dziwiæ, jeķli przedwczeķnie zawiedzie. Dla cyklu pracy 33 procent silnik moŋe mieæ moc znamionową 15 N⋅m, o ile jakikolwiek pojedynczy okres pracy nie przekracza 2 min. Jeķli wystarczy tylko obróciæ o 0,5 N⋅m m, silnik moŋe nie tylko pracowaæ w sposób ciągģy, ale prawdopodobnie będzie trwaģ dģuŋej niŋ oczekiwany okres uŋytkowania. Urządzenia takie jak silniki robotów moŋna zabezpieczyæ przed przepracowaniem (chwilowym lub dģugotrwaģym) za pomocą czujników przeciwciķnienia.
DYNAMICZNA STABILNOĶÆ
Dynamiczna stabilnoķæ jest miarą zdolnoķci robota do utrzymania równowagi podczas ruchu. Robot z dwiema lub trzema nogami lub toczący się na dwóch koģach moŋe mieæ doskonaģą stabilnoķæ podczas ruchu, ale jeķli chodzi o odpoczynek, jest niestabilny. Dwunoŋny robot moŋna ģatwo przewróciæ, gdy stoi w miejscu. Jest to jedna z gģównych wad dwunoŋnych robotów. Trudno i kosztownie jest zbudowaæ poczucie równowagi, w rodzaju tego, co uwaŋa się za coķ oczywistego, w maszynie dwunoŋnej lub dwukoģowej, mimo ŋe zostaģo to juŋ zrobione. Roboty z czterema lub szeķcioma nogami mają dobrą stabilnoķæ dynamiczną, ale zwykle poruszają się wolniej w porównaniu do maszyn, które mają mniej nóg.
DYNAMICZNY PRZETWORNIK
Przetwornik dynamiczny jest urządzeniem cewki i magnesu, które przeksztaģca ruch mechaniczny w elektrycznoķæ lub odwrotnie. Najczęstszymi przykģadami są mikrofon dynamiczny i dynamiczny gģoķnik. Przetworniki dynamiczne mogą byæ uŋywane jako czujniki w róŋnych aplikacjach robotycznych. Ilustracja jest schematem funkcjonalnym przetwornika dynamicznego odpowiedniego do przeksztaģcania fal džwiękowych w prądy elektryczne i odwrotnie. Membrana przymocowana do magnesu staģego. Magnes jest otoczony cewką z drutu. Wibracje akustyczne powodują przesuwanie membrany do przodu i do tyģu; powoduje to ruch magnesu, co powoduje wahania pola magnetycznego w cewce. Rezultatem jest wyjķcie prądu przemiennego (AC) z cewki, mające ten sam przebieg co fale džwiękowe, które uderzają w membranę.
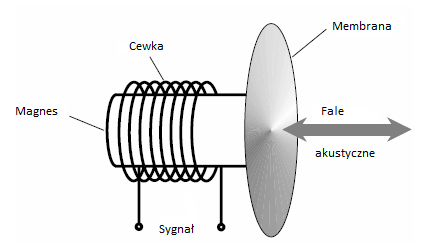
Jeŋeli sygnaģ cewki zostanie przyģoŋony do cewki drutu, wytwarza ono pole magnetyczne, które wytwarza siģy na magnes staģy. Powoduje to ruch magnesu, popychając membranę do przodu i do tyģu. To wypiera powietrze w pobliŋu przepony, wytwarzając fale akustyczne, które podąŋają za przebiegiem sygnaģu. Dynamiczne przetworniki są powszechnie stosowane w robotycznych systemach rozpoznawania mowy i syntezy mowy.
Detekcja krawędzi polega na zdolnoķci robotycznego systemu wizyjnego do lokalizowania granic. Odnosi się to równieŋ do wiedzy robota na temat tego, jak postępowaæ w odniesieniu do tych granic. Na przykģad samochód-robot wykorzystuje wykrywanie krawędzi, aby zobaczyæ krawędzie drogi, i korzysta z danych, aby utrzymaæ się na drodze, ale musi równieŋ zachowaæ pewną odlegģoķæ od prawej krawędzi chodnika, więc ŋe nie przechodzi na pas ruchu nadjeŋdŋającego z przeciwka. Musi trzymaæ się z dala od pobocza drogi. Dlatego musi odróŋniaæ nawierzchnię od innych nawierzchni, takich jak ŋwir, trawa, piasek i ķnieg. Samochód robota moŋe wykorzystywaæ do tego celu lampy ostrzegawcze, ale wymaga to instalacji systemu prowadzenia wczeķniej ograniczając samochód robota do dróg, które są wyposaŋone w takie pomoce nawigacyjne. Osobisty robot wyposaŋony w funkcję wykrywania krawędzi moŋe widzieæ okreķlone kontury w swoim ķrodowisku pracy. Dzięki temu maszyna nie wpadnie na ķciany, zamknięte drzwi, okna lub nie spadnie ze schodów.
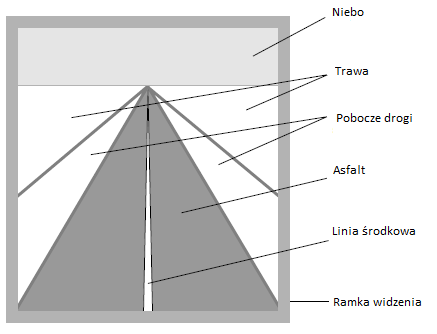
EDUKACYJNY ROBOT
Termin robot edukacyjny odnosi się do kaŋdego robota, który powoduje, ŋe jego uŋytkownicy uczą się czegoķ. W szczególnoķci termin ten dotyczy robotów dostępnych do uŋytku konsumenckiego. Roboty tego rodzaju staģy się popularne wķród dzieci, szczególnie w Japonii, ale coraz częķciej w Stanach Zjednoczonych i innych krajach zachodnich. Te maszyny są zabawkami w tym sensie, ŋe dzieci dobrze się z nimi bawią, ale często są równieŋ doskonaģymi nauczycielami. Dzieci uczą się najlepiej, gdy bawią się jednoczeķnie. Robot instruktaŋowy to robot edukacyjny przeznaczony do dziaģania wyģącznie lub przede wszystkim jako nauczyciel. Roboty tego rodzaju moŋna kupiæ do uŋytku w domu, ale częķciej moŋna je znaležæ w szkoģach, zwģaszcza na poziomie gimnazjum i liceum (klasy od 7 do 12). Roboty są zastraszające dla niektórych uczniów. Ale gdy dziecko lub mģody dorosģy przyzwyczai się do pracy lub zabawy z maszynami, roboty mogą staæ się towarzyszami, szczególnie jeķli istnieje pewna miara sztucznej inteligencji (AI).
ELASTOMER
Elastomer to elastyczna substancja przypominająca gumę lub plastik. W robotycznym wyczuwaniu dotykowym elastomery mogą byæ stosowane do wykrywania obecnoķci lub braku ciķnienia mechanicznego. Ilustracja pokazuje, w jaki sposób elastomer moŋna wykorzystaæ do wykrywania i lokalizacji punktu nacisku. Elastomer przewodzi elektrycznoķæ doķæ dobrze, ale nie idealnie. Ma konsystencję pianki, dzięki czemu moŋna go skompresowaæ. Ukģad elektrod jest podģączony do górnej częķci podkģadki elastomerowej; identyczny ukģad jest podģączony do dolnej częķci pada. Elektrody te biegną do kontrolera robota. Kiedy w pewnym momencie na podkģadce elastomerowej pojawia się ciķnienie, materiaģ ķciska się, co obniŋa jego opór elektryczny w maģym obszarze. Jest to wykrywane jako wzrost prądu między elektrodami w górnej podkģadce i dolnej podkģadce, ale tylko w obszarze, w którym elastomer jest ķciskany. Dane są przesyģane do przetwornika analogowo-cyfrowego (ADC), a następnie do mikrokomputera, który okreķla, gdzie występuje ciķnienie i jak intensywny jest.
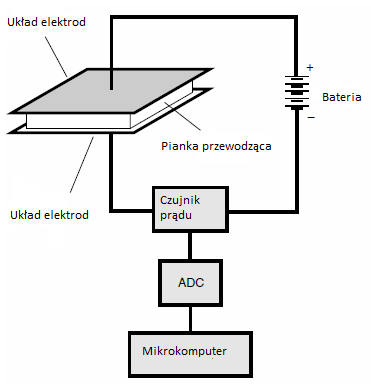
ELEKTRYCZNE OCZY
Oko elektryczne wykrywa optycznie przedmiot, a następnie uruchamia urządzenie. Na przykģad moŋna go skonfigurowaæ do wykrywania wszystkiego, co przechodzi przez drzwi. Moŋe to zliczaæ liczbę osób wchodzących lub wychodzących z budynku. Innym przykģadem jest liczenie przedmiotów na szybko zmieniającej się linii montaŋowej; kaŋdy element raz ģamie wiązkę ķwiatģa, a obwód zlicza liczbę przerw. Zwykle oko elektryczne ma žródģo ķwiatģa i fotokomórkę; są one podģączone do obwodu uruchamiającego, jak pokazano na schemacie blokowym. Gdy coķ zakģóca wiązkę ķwiatģa, napięcie lub prąd z fotokomórki dramatycznie się zmienia. Obwody elektroniczne mogą ģatwo wykryæ tę zmianę napięcia lub prądu. Za pomocą wzmacniaczy nawet najmniejszą zmianę moŋna zastosowaæ do sterowania duŋymi maszynami. Elektryczne oczy nie zawsze dziaģają przy ķwietle widzialnym. Podczerwieņ (IR), o dģugoķci fali nieco większej niŋ widzialna czerwieņ, jest powszechnie stosowana w optycznych urządzeniach wykrywających. Jest to idealne rozwiązanie do stosowania w alarmach antywģamaniowych, poniewaŋ intruz nie widzi wiązki, a zatem nie moŋe jej uniknąæ.
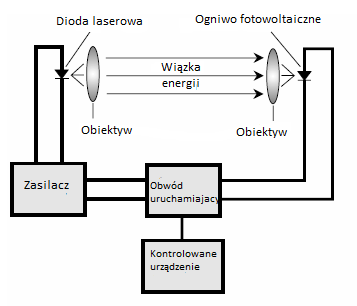
ELEKTROCHEMICZNA MOC
Ogniwo elektrochemiczne jest jednostkowym žródģem energii prądu staģego (DC). Gdy dwa lub więcej takich ogniw jest poģączonych szeregowo w celu zwiększenia napięcia, powstaje bateria. Ogniwa elektrochemiczne i baterie są szeroko stosowane w robotach mobilnych.
Komórka kwasowo-oģowiowa
Rysunek pokazuje przykģad ogniwa kwasowo-oģowiowego. Elektroda oģowiu i elektroda dwutlenku oģowiu zanurzone w roztworze kwasu siarkowego wykazują róŋnicę potencjaģów. Napięcie to moŋe napędzaæ prąd przez obciąŋenie. Maksymalny dostępny prąd zaleŋy od objętoķci i masy ogniwa. Jeķli to ogniwo jest podģączone do obciąŋenia przez dģugi czas, prąd stopniowo będzie się zmniejszaæ, a elektrody zostaną pokryte. Natura kwasu ulegnie zmianie. Caģa energia potencjalna w kwasie zostanie przeksztaģcona w energię elektryczną prądu staģego, a ostatecznie w ciepģo, ķwiatģo widzialne, fale radiowe, džwięk lub ruch mechaniczny.
Pierwotne i wtórne komórki
Niektóre ogniwa, gdy ich energia chemiczna zostaģa zamieniona na energię elektryczną i zuŋyta, muszą zostaæ wyrzucone. To są komórki pierwotne. Inne rodzaje ogniw, takie jak opisana powyŋej jednostka kwasowo-oģowiowa, mogą odzyskaæ swoją energię chemiczną poprzez ponowne naģadowanie. Taki skģadnik jest komórką wtórną. Ogniwa pierwotne zawierają suchą pastę elektrolitową wraz z elektrodami metalowymi. Nazywają się takimi nazwami jak komórka sucha, komórka cynkowo-węglowa lub komórka alkaliczna. Komórki te są powszechnie spotykane w supermarketach i innych sklepach. Niektóre komórki wtórne moŋna równieŋ znaležæ na poziomie konsumenta. Ogniwa niklowo-kadmowe (Ni - Cd lub NICAD) są powszechnym typem. Te kosztują więcej niŋ zwykģe suche ogniwa, a jednostka ģadująca kosztuje równieŋ kilka dolarów. Jednak te akumulatory mogą byæ uŋywane setki razy i mogą kilkakrotnie pģaciæ za siebie i ģadowarkę. Akumulator samochodowy jest wykonany z ogniw wtórnych poģączonych szeregowo. Ogniwa te ģadują się z alternatora lub z zewnętrznej jednostki ģadującej. Ten typ baterii ma ogniwa podobne do pokazanych tu
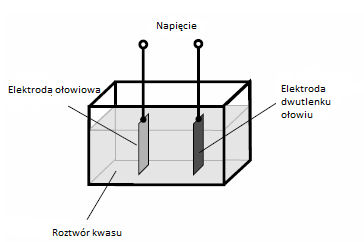
Zwarcie styków takiej baterii jest niebezpieczne, poniewaŋ kwas moŋe się zagotowaæ. W rzeczywistoķci nierozsądne jest zwarcie dowolnego ogniwa lub akumulatora, poniewaŋ moŋe ono wybuchnąæ lub spowodowaæ poŋar.
Pojemnoķæ przechowywania
Wspólnymi jednostkami energii elektrycznej są watogodzina (Wh) i kilowatogodzina (kWh). Kaŋde ogniwo lub bateria ma pewną iloķæ energii elektrycznej, którą moŋna okreķliæ w watogodzinach lub kilowatogodzinach. Często podaje się go jako caģkę matematyczną prądu dostarczalnego w odniesieniu do czasu, w amperogodzinach (Ah). Pojemnoķæ energetyczna w watogodzinach to pojemnoķæ amperogodzin pomnoŋona przez napięcie akumulatora. Akumulator o wartoķci znamionowej 20 Ah moŋe zapewniæ 20 A przez 1 godzinę lub 1 A przez 20 godzin lub 100 mA (100 miliamperów) przez 200 godzin. Ograniczeniami są okres trwaģoķci przy jednej skrajnoķci i maksymalny dostarczalny prąd z drugiej. Okres trwaģoķci to czas, przez jaki bateria będzie uŋyteczna, jeķli nigdy nie będzie podģączona do ģadunku; mierzy się to w miesiącach lub latach. Maksymalny dostarczany prąd to najwyŋszy prąd, jaki akumulator moŋe przepģynąæ przez obciąŋenie bez znacznego spadku napięcia z powodu wģasnej wewnętrznej rezystancji akumulatora. Maģe komórki mają pojemnoķæ kilku miliamperów (mAh) do 100 lub 200 mAh. Ķrednie ogniwa mogą dostarczaæ od 500 mAh do 1000 mAh (1 Ah). Duŋe samochodowe akumulatory oģowiowo-kwasowe mogą zapewniæ moc powyŋej 100 Ah.
Krzywa rozģadowania
Kiedy uŋywa się idealnego ogniwa lub idealnego akumulatora, dostarcza on przez pewien czas staģy prąd, a następnie prąd zaczyna maleæ. Niektóre typy ogniw i akumulatorów zbliŋają się do tego idealnego zachowania, wykazując pģaską krzywą rozģadowania.
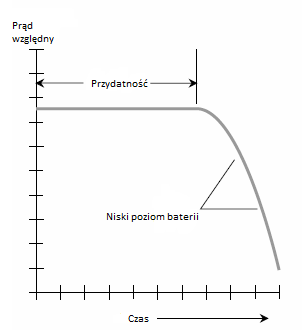
Inne mają prąd, który stopniowo maleje od początku uŋytkowania; jest to malejąca krzywa rozģadowania
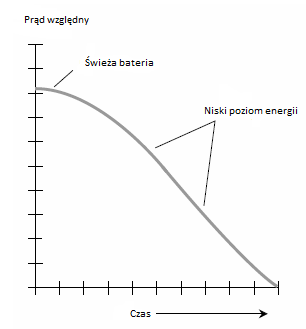
Gdy prąd, który moŋe zapewniæ bateria, spadģ do okoģo poģowę swojej wartoķci początkowej mówi się, ŋe ogniwo lub bateria są "sģabe" lub "sģabe". W tej chwili naleŋy go wymieniæ. Bateria nie powinna rozģadowywaæ się, dopóki prąd nie spadnie prawie do zera.
Wspólne ogniwa i baterie
Ogniwa sprzedawane w sklepach i uŋywane w przedmiotach wygodnych, takich jak latarki i radia tranzystorowe, są zwykle odmiany cynkowo-węglowej lub alkalicznej. Zapewniają one 1,5 wolta (V) i są dostępne w rozmiarach AAA (bardzo maģy), AA (maģy), C (ķredni) i D (duŋy). Baterie wykonane z tych ogniw są zwykle oceniane na 6 V lub 9 V. Ogniwa cynkowo-węglowe mają doķæ dģugi okres trwaģoķci. Cynk tworzy obudowę zewnętrzną i jest elektrodą ujemną. Pręt węglowy sģuŋy jako elektroda dodatnia. Elektrolit jest pastą dwutlenku manganu i węgla. Ogniwa cynkowo-węglowe są niedrogie i moŋna je stosowaæ w umiarkowanych temperaturach oraz w zastosowaniach, w których obecny drenaŋ jest umiarkowany do wysokiego. Nie dziaģają dobrze w ekstremalnie niskich temperaturach. Ogniwa alkaliczne mają ziarnisty cynk dla elektrody ujemnej, wodorotlenek potasu jako elektrolit i polaryzator jako elektrodę dodatnią. Ogniwo alkaliczne moŋe pracowaæ w niŋszych temperaturach niŋ ogniwo cynkowo-węglowe. Trwa równieŋ dģuŋej w większoķci urządzeņ elektronicznych, dlatego jest preferowany do stosowania w radiach tranzystorowych, kalkulatorach i przenoķnych odtwarzaczach kasetowych. Jego trwaģoķæ jest znacznie dģuŋsza niŋ w przypadku ogniw cynkowo-węglowych. Baterie tranzystorowe są maģymi, 9-V, pudeģkowatymi bateriami z zaczepami na górze. Skģadają się one z szeķciu maleņkich ogniw cynkowo-węglowych lub alkalicznych poģączonych szeregowo. Baterie te są uŋywane w urządzeniach elektronicznych o niskim natęŋeniu prądu, takich jak przenoķne radioodtwarzacze douszne, radiowe otwieracze do drzwi garaŋowych, odbiorniki telewizyjne i stereo oraz kalkulatory elektroniczne. Baterie latarniowe są doķæ masywne i mogą zapewniæ spory prąd. Jeden typ ma styki spręŋynowe na górze. Drugi typ ma zaciski ķrubowe. Oprócz podtrzymywania zapalonej ŋarówki przez chwilę, baterie te, zwykle o napięciu 6 V i skģadające się z czterech ogniw cynkowo-węglowych lub alkalicznych, mogą zapewniæ wystarczającą energię do obsģugi radia komunikacyjnego o maģej mocy lub maģego robota mobilnego. Komórki z tlenku srebra są zwykle wykonane w ksztaģcie guzików i mogą mieķciæ się w zegarku. Występują w róŋnych rozmiarach i gruboķciach, wszystkie o podobnym wyglądzie. Dostarczają 1,5 V i oferują doskonaģy zapas energii dla wagi. Mają pģaską krzywą rozģadowania. Ogniwa z tlenku srebra moŋna ukģadaæ w stosy, aby uzyskaæ baterie o wielkoķci cylindrycznego ogniwa AA. Ogniwa rtęciowe, zwane takŋe ogniwami tlenkowymi rtęciowymi, mają zalety podobne do ogniw tlenkowych srebra. Są wytwarzane w tej samej ogólnej formie. Gģówną róŋnicą, często nieistotną, jest nieco niŋsze napięcie na ogniwo: 1,35 V. W ostatnich latach popularnoķæ ogniw rtęciowych i akumulatorów spadģa, poniewaŋ rtęæ jest toksyczna i nie jest ģatwo usuwana. Ogniwa litowe zasilają napięcie od 1,5 do 3,5 V, w zaleŋnoķci od zastosowanej chemii. Ogniwa te, podobnie jak ich kuzyni tlenku srebra, moŋna ukģadaæ w stosy, aby uzyskaæ baterie. Ogniwa litowe i akumulatory mają doskonaģą trwaģoķæ i mogą dziaģaæ przez lata w zastosowaniach o bardzo niskim prądzie. Zapewniają doskonaģą pojemnoķæ energetyczną na jednostkę objętoķci.
Ogniwa i akumulatory oģowiowo-kwasowe mają roztwór lub pastę kwasu siarkowego wraz z elektrodą oģowiową (ujemną) i elektrodą ditlenkową oģowiu (dodatnią). Akumulatory oģowiowo-kwasowe moŋna stosowaæ w urządzeniach konsumenckich wymagających umiarkowanego prądu, takich jak laptopy, przenoķne magnetowidy i roboty osobiste. Są równieŋ stosowane w zasilaczach bezprzerwowych do komputerów osobistych.
Ogniwa i baterie niklowe
Komórki NICAD występują w kilku postaciach. Komórki cylindryczne wyglądają jak suche komórki. Komórki przycisków są uŋywane w aparatach, zegarkach, aplikacjach do tworzenia kopii zapasowych pamięci i innych miejscach, w których waŋna jest miniaturyzacja. Zalane ogniwa są uŋywane w cięŋkich warunkach i mogą mieæ pojemnoķæ do 1000 Ah. Komórki statków kosmicznych są wytwarzane w opakowaniach, które mogą wytrzymaæ pozaziemskie temperatury i ciķnienia. Akumulatory NICAD są dostępne w zestawach ogniw, które moŋna podģączyæ do urządzenia, aby stanowiģy częķæ obudowy urządzenia. Przykģadem jest zestaw akumulatorów do ręcznego nadajnika-odbiornika radiowego. Ogniwa i akumulatory NICAD nigdy nie powinny pozostaæ podģączone do obciąŋenia po spadku prądu do zera. Moŋe to spowodowaæ odwrócenie biegunowoķci ogniwa lub jednego lub więcej ogniw w akumulatorze. Gdy to nastąpi, ogniwo lub akumulator przestaną byæ uŋyteczne. Kiedy NICAD zbliŋa się do peģnego rozģadowania, naleŋy je jak najszybciej naģadowaæ. Ogniwa i akumulatory niklowo-wodorkowe (NiMH) mogą w większoķci zastosowaņ bezpoķrednio zastępowaæ jednostki NICAD.
ELEKTROMAGNETYCZNA OSĢONA
Ekranowanie elektromagnetyczne jest ķrodkiem zapobiegającym wpģywom komputerów i innego wraŋliwego sprzętu na rozproszone pola elektromagnetyczne (EM). Komputery równieŋ wytwarzają wģasną energię elektromagnetyczną, co moŋe powodowaæ zakģócenia innych urządzeņ, zwģaszcza odbiorników radiowych, chyba ŋe zastosowane zostanie ekranowanie. Najprostszym sposobem zapewnienia ekranowania EM dla obwodu jest otoczenie go metalem, zwykle miedzią lub aluminium, i poģączenie tego metalu z uziemieniem elektrycznym. Poniewaŋ metale są dobrymi przewodnikami, pole elektromagnetyczne wytwarza w nich prądy elektryczne. Prądy te przeciwstawiają się polu elektromagnetycznemu, a jeķli metalowa obudowa jest uziemiona, pole elektromagnetyczne jest w efekcie zwarte. Kable ģączące powinny byæ równieŋ ekranowane, aby zapewniæ optymalną ochronę przed zakģóceniami elektromagnetycznymi (EMI). Odbywa się to poprzez otoczenie wszystkich ŋyģ kablowych oplotem miedzianym. Oplot jest uziemiony elektrycznie przez zģącza na koņcach kabla. Jedną z największych zalet ķwiatģowodowej transmisji danych jest to, ŋe nie wymaga ekranowania elektromagnetycznego. Systemy ķwiatģowodowe są odporne na pola elektromagnetyczne wytwarzane przez nadajniki radiowe i okablowanie uŋytkowe prądu przemiennego. Systemy ķwiatģowodowe dziaģają równieŋ bez generowania zewnętrznych pól elektromagnetycznych, więc nie powodują zakģóceņ elektromagnetycznych otaczających obwodów i urządzenia
ELEKTROMECHANICZNY PRZETWORNIK
Przetwornik elektromechaniczny to urządzenie, które przeksztaģca energię elektryczną w energię mechaniczną i odwrotnie. Silniki elektryczne i generatory elektryczne są najczęstszymi przykģadami. Silnik dziaģa za pomocą siģ magnetycznych wytwarzanych przez prądy elektryczne; generator wytwarza prądy elektryczne w wyniku ruchu przewodnika elektrycznego w polu magnetycznym. Urządzenia przetwarzające džwięk na energię elektryczną lub odwrotnie, są kolejną formą przetwornika elektromechanicznego. Gģoķniki i mikrofony to uniwersalne przykģady. Zwykle dziaģają na podstawie zasad dynamicznych, ale niektóre dziaģają na zasadzie oddziaģywaņ elektrostatycznych. Mierniki analogowe typu galwanometrycznego, znane równieŋ jako mierniki D'Arsonval, są przetwornikami elektromechanicznymi. Przeksztaģcają prąd elektryczny w przemieszczenie. W ostatnich latach mierniki cyfrowe w duŋej mierze zastąpiģy mierniki elektromechaniczne. Urządzenia cyfrowe nie mają ruchomych częķci, które mogą się zuŋywaæ, więc dziaģają znacznie dģuŋej
niŋ typy elektromechaniczne. Liczniki cyfrowe są równieŋ w stanie tolerowaæ bardziej fizyczne znęcanie się. Roboty wykorzystują elektromechaniczne przetworniki na wiele sposobów. Przykģady obejmują selsyn, silnik krokowy i serwomechanizm. Przetwornik elektrostatyczny jest urządzeniem, które zamienia energię mechaniczną na energię elektryczną lub odwrotnie, wykorzystując siģy elektrostatyczne. Najczęstsze typy obejmują konwersję fal džwiękowych i prądów elektrycznych o częstotliwoķci akustycznej. Ilustracja jest schematem funkcjonalnym przetwornika elektrostatycznego. Moŋe dziaģaæ zarówno jako mikrofon (przetwornik džwięk-prąd), jak i gģoķnik (przetwornik prąd-džwięk). W "trybie mikrofonu" przychodzące fale džwiękowe powodują wibracje elastycznej pģyty. Powoduje to szybkie (choæ niewielkie) zmiany odstępów, a zatem i pojemnoķci między dwiema pģytkami.
PRZETWORNIK ELEKTROSTATYCZNY
Przetwornik elektrostatyczny jest urządzeniem, które zamienia energię mechaniczną na energię elektryczną lub odwrotnie, wykorzystując siģy elektrostatyczne. Najczęstsze typy obejmują konwersję fal džwiękowych i prądów elektrycznych o częstotliwoķci akustycznej. Ilustracja jest schematem funkcjonalnym przetwornika elektrostatycznego. Moŋe dziaģaæ zarówno jako mikrofon (przetwornik džwięk-prąd), jak i gģoķnik (przetwornik prąd-džwięk). W trybie mikrofonu przychodzące fale džwiękowe powodują wibracje elastycznej pģyty. Powoduje to szybkie (choæ niewielkie) zmiany odstępów, a zatem i pojemnoķci między dwiema pģytkami. Jak pokazano, na pģytki przykģadane jest napięcie prądu staģego (DC). Gdy pojemnoķæ zmienia się między pģytami, pole elektryczne między nimi pģynie. Powoduje to zmiany prądu przez uzwojenie pierwotne
transformator. Sygnaģy audio pojawiają się na uzwojeniu wtórnym.
W trybie gģoķników prądy w transformatorze powodują zmiany w
napięcie między pģytkami. Ta zmiana powoduje fluktuacje siģy elektrostatycznej, pociągając i wypychając elastyczną pģytkę do ķrodka i na zewnątrz. Ruch elastycznej pģyty wytwarza fale džwiękowe. Przetworniki elektrostatyczne mogą byæ stosowane w większoķci zastosowaņ, w których stosowane są inne typy przetworników. Obejmuje to rozpoznawanie mowy i
systemy syntezy mowy. Zalety przetworników elektrostatycznych obejmują niewielką wagę i doskonaģą czuģoķæ. Mogą równieŋ pracowaæ z maģymi prądami elektrycznymi
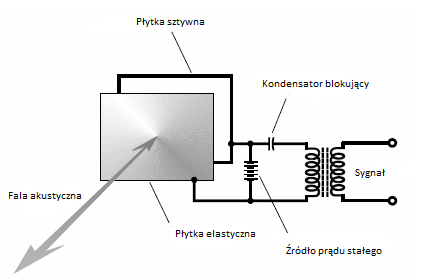
EMBEDDED PATH [WBUDOWANA ĶCIEŊKA]
Osadzona ķcieŋka to sposób prowadzenia robota po okreķlonej trasie. Zautomatyzowany pojazd kierowany (AGV) stosuje ten schemat. Jednym z powszechnych rodzajów osadzonych ķcieŋek jest zakopany drut przewodzący prąd. Prąd w przewodzie wytwarza pole magnetyczne, za którym robot moŋe podąŋaæ. Ta metoda prowadzenia zostaģa zaproponowana jako sposób na utrzymanie samochodu na autostradzie, nawet jeķli kierowca nie zwraca uwagi. Drut potrzebuje staģego dopģywu prądu, aby ta metoda prowadzenia mogģa dziaģaæ. Jeķli prąd zostanie z jakiegokolwiek powodu przerwany, robot zgubi się. Alternatywy dla drutów, takie jak kolorowe farby lub taķmy, nie wymagają zasilania, a to daje im przewagę. Taķma jest ģatwa do usunięcia i umieszczenia gdzie indziej; jest to trudne w przypadku farby i praktycznie niemoŋliwe w przypadku drutów zatopionych w betonie.
EMPIRYCZNE PROJEKTOWANIE
Projektowanie empiryczne jest techniką inŋynierską, w której oprócz teorii wykorzystuje się doķwiadczenie i intuicję. Proces ten jest w duŋej mierze próbą i bģędem. Inŋynier zaczyna od logicznego punktu, opartego na teoretycznych zasadach, ale eksperymenty są konieczne, aby urządzenie lub system dziaģaģy prawidģowo. Roboty idealnie nadają się do empirycznych technik projektowania. Inŋynier nie moŋe opracowywaæ planów robota, bez względu na to, jak szczegóģowy lub skrupulatny moŋe byæ proces kreķlarski, i oczekiwaæ, ŋe prawdziwa maszyna będzie dziaģaģa idealnie podczas pierwszej próby. Prototyp jest budowany i testowany, z uwzględnieniem wad. Inŋynier wraca do deski kreķlarskiej i zmienia projekt. Czasami trzeba zacząæ wszystko od nowa; częķciej dokonywane są maģe zmiany. Urządzenie jest ponownie testowane i odnotowano problemy. Następuje kolejna runda deski kreķlarskiej. Proces ten powtarza się, aŋ maszyna będzie dziaģaæ tak, jak chce inŋynier (lub klient).
EFEKTOR KOŅCOWY
Efektor koņcowy to urządzenie lub narzędzie podģączone do koņca ramienia robota. Charakter efektów koņcowych zaleŋy od zamierzonego zadania. Jeķli robot zaprojektowano do zastawiania stoģu na kolację, "dģonie", częķciej nazywane chwytakami robota, moŋna przymocowaæ do koņców ramion robota. W robotach z linii montaŋowej zaprojektowanych do wkręcania ķrub w szafki na koņcu ramienia moŋna zamocowaæ urządzenie z obrotowym waģem i gģowicę ķrubokręta. Taki obrotowy waģek moŋe byæ równieŋ wyposaŋony w wiertģo do wiercenia otworów lub tarczę ķcierną do szlifowania drewna. Dany typ ramienia robota moŋe zwykle pomieķciæ tylko niektóre rodzaje efektorów koņcowych. Nie moŋna wziąæ robota do ustawiania stoģu, wystarczy go wymieniæ jednym z jego chwytaków za pomocą ķrubokręta, a następnie spodziewaj się, ŋe dokręci ķruby na zawiasach szafek kuchennych. Taka zmiana zadania wymaga zmiany programowania sterownika robota, dlatego dziaģa on w "trybie handyrobot", a nie w "trybie waitrobot". Naleŋy takŋe zmieniæ osprzęt w ramieniu robota, aby obsģugiwaæ efektor obracający się, a nie chwytak.
ENTITIZATION [OBIEKTYWIZACJA]
Entytyzacja, zwana takŋe obiektywizacją, jest wyrazem ģatwoķci, z jaką robot moŋe rozróŋniaæ obiekty w swoim ķrodowisku pracy. Jest to wskažnik skutecznoķci rozpoznawania obiektów i moŋna go zdefiniowaæ w kategoriach jakoķciowych lub iloķciowych.
Jakoķciowe wyraŋenia uprawnieņ to przymiotniki (takie jak "dobry" , "sprawiedliwy" lub "biedny"). Uprawnienie iloķciowe okreķla się na podstawie odsetka prawidģowych identyfikacji w duŋej liczbie testów w praktycznym scenariuszu. Na przykģad, jeķli robot poprawnie zidentyfikuje obiekt 997 na 1000 razy, jego uprawnienie ma wartoķæ 99,7 procent dokģadnoķci.
EPIPOLARNA NAWIGACJA
Nawigacja epipolarna to ķrodek, za pomocą którego maszyna moŋe lokalizowaæ obiekty w przestrzeni trójwymiarowej (3D). Moŋe takŋe nawigowaæ i ustalaæ wģasną pozycję i ķcieŋkę. Nawigacja epipolarna polega na ocenie, jak obraz wydaje się zmieniaæ, gdy patrzy się z ruchomego punktu widzenia. Ludzki ukģad oko / mózg robi to w ograniczonym stopniu, bez większego zastanowienia lub ķwiadomego wysiģku. Systemy wizyjne robotów mogą to zrobiæ z niezwykģą precyzją. Aby zilustrowaæ epipolarną nawigację, wyobraž sobie zrobotyzowany samolot (dron) latający nad oceanem. Jedynym lądem pod dronem jest maģa wyspa. Sterownik robota ma na twardym dysku doskonaģą mapę, która pokazuje poģoŋenie, rozmiar i dokģadny ksztaģt tej wyspy. W przypadku oprzyrządowania dron ma tylko komputer, dobrą kamerę wideo i wyrafinowane programowanie. Dron moŋe nawigowaæ po swojej drodze, obserwując wyspę i badając ksztaģt i rozmiar kątowy obrazu wyspy. Gdy dron leci, wyspa wydaje się poruszaæ pod nim. Kamera jest zamocowana na wyspie. Kontroler widzi obraz, który stale zmienia ksztaģt i rozmiar kątowy. Kontroler jest zaprogramowany na wartoķæ true na rozmiar, ksztaģt, orientacja i poģoŋenie geograficzne wyspy. Kontroler porównuje ksztaģt / rozmiar obrazu, który widzi, z punktu widzenia samolotu, z rzeczywistym ksztaģtem / rozmiarem wyspy, którą "zna" z danych mapy. Na tej podstawie moŋe dokģadnie okreķliæ drona:
• Wysokoķæ
• Prędkoķæ jazdy w stosunku do powierzchni
• Kierunek jazdy w stosunku do powierzchni
• Szerokoķæ geograficzna
• Dģugoķæ geograficzna
Kluczem jest to, ŋe istnieje zgodnoķæ jeden na jeden między wszystkimi punktami w zasięgu wzroku wyspy, a kątowym rozmiarem i ksztaģtem obrazu wyspy. Korespondencja jest zdecydowanie zbyt zģoŋona, by czģowiek mógģ ją dokģadnie zapamiętaæ; ale w przypadku komputera dopasowanie obrazu, który widzi do okreķlonego punktu w przestrzeni, jest ģatwe. Nawigacja epipolarna moŋe teoretycznie dziaģaæ w dowolnej skali i przy dowolnej prędkoķci, a nawet prędkoķciach relatywistycznych, przy których następuje dylatacja czasu. Jest to metoda, dzięki której roboty mogą znaležæ drogę bez triangulacji, wyszukiwania kierunku, sygnaģów nawigacyjnych, sonaru lub radaru. Konieczne jest jednak, aby robot miaģ szczegóģową, precyzyjną i dokģadną komputerową mapę swojego ķrodowiska.
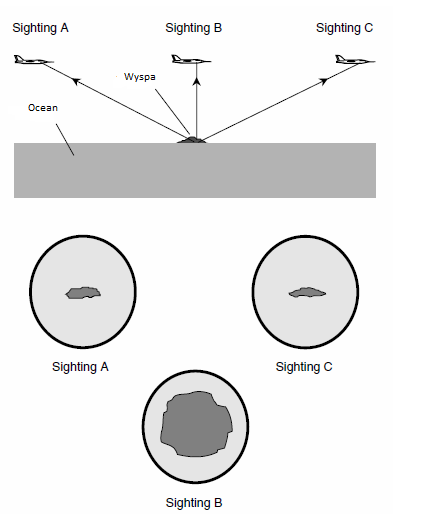
ERROR ACCUMULATION [AKUMULACJA BĢĘDU]
Gdy pomiary są wykonywane kolejno, maksimum moŋliwych bģędów sumuje się. Nazywa się to akumulacją bģędów. Kumulację bģędów analogowych moŋna zilustrowaæ na przykģadzie pomiaru. Zaģóŋmy, ŋe chcesz zmierzyæ dģugi kawaģek sznurka (powiedzmy okoģo 100 m), uŋywając miernika metrycznego oznaczonego w milimetrach. Musisz umieķciæ kij wzdģuŋ sznurka w kóģko, okoģo 100 razy. Jeķli twój bģąd wynosi do ą 2 mm przy kaŋdym pomiarze, to po 100 powtórzeniach moŋliwy bģąd wynosi do ą 200 mm. Cyfrowa akumulacja bģędów występuje, gdy bity są žle odczytywane w obwodzie komunikacyjnym, niepoprawnie zapisywane na dysku lub niepoprawnie przechowywane w pamięci. Maszyna moŋe widzieæ niską logikę, kiedy powinna widzieæ wysoką wartoķæ, lub odwrotnie. Zaģóŋmy, ŋe dla konkretnego pliku cyfrowego za kaŋdym razem, gdy plik jest przenoszony z jednego węzģa do drugiego w obwodzie komunikacyjnym, wprowadzane są ķrednio trzy bģędy. Jeŋeli sygnaģ przechodzi przez n węzģów, wystąpi ķrednio 3n bģędów (3 + 3 + 3 + + 3, n razy). W systemach robotycznych bģędy kinematyczne lub bģędy ruchu mogą się kumulowaæ w czasie, co powoduje ewentualne bģędy pozycjonowania lub przesunięcia.
ERROR CORRECTION [KOREKCJA BĢĘDÓW]
Korekta bģędów jest formą programowania komputerowego, w której niektóre rodzaje bģędów są korygowane automatycznie. Przykģadem jest program, który utrzymuje duŋy sģownik angielskich sģów. Operator komputera podģączonego do robota syntezującego mowę moŋe žle pisaæ sģowa lub popeģniaæ bģędy typograficzne. Uruchomienie programu korekcji bģędów spowoduje, ŋe komputer wyodrębni wszystkie osobliwie wyglądające sģowa, zwracając na nie uwagę operatora. Operator moŋe wtedy zdecydowaæ, czy sģowo jest poprawne. W nowoczesnych komputerach moŋna ģatwo przechowywaæ ogromne sģowniki. Gdy roboty muszą ķledziæ zmienne, takie jak pozycja i prędkoķæ, moŋna zastosowaæ korekcję bģędów, gdy wiadomo, ŋe przyrząd jest nieprecyzyjny lub gdy wartoķci odbiegają od rozsądnego zakresu. Komputer moŋe ķledziæ gromadzenie się bģędów, okresowo sprawdzając, czy rozbieŋnoķci nie sumują się powyŋej okreķlonego maksimum. Korekcja bģędów jest waŋna w systemach robotycznych podlegających obciąŋeniu grawitacyjnemu. Aby zapewniæ, ŋe efektor koņcowy w ramieniu robota nie zboczy z zamierzonego poģoŋenia z powodu siģy grawitacji na sam zespóģ, moŋna zastosowaæ urządzenia wykrywające poģoŋenie i system sprzęŋenia zwrotnego zastosowany do przeciwdziaģania ruchowi ramienia robota, aŋ sygnaģ bģędu z czujnika wynosi zero. W robotycznych systemach nawigacyjnych korekcja bģędów odnosi się do zestawu procesów, które utrzymują urządzenie na zamierzonym kursie. W serwomechanizmie korekcja bģędów odbywa się za pomocą sprzęŋenia zwrotnego.
ERROR-SENSING CIRCUIT [OBWÓD WYKRYWANIA BĢĘDÓW]
Obwód wykrywający bģąd wytwarza sygnaģ, gdy dwa wejķcia są róŋne lub gdy zmienna odbiega od wybranej wartoķci. Jeķli dwa wejķcia są takie same lub jeķli zmienna ma wybraną wartoķæ, wyjķcie wynosi zero. Ten typ obwodu jest czasami nazywany komparatorem. Zaģóŋmy, ŋe chcesz, aby robot wprowadziģ się na jakiķ obiekt. Obiekt ma nadajnik radiowy, który wysyģa sygnaģ nawigacyjny. Robot ma wbudowane urządzenie radiowego wyszukiwania kierunku (RDF). Gdy robot zmierza we wģaķciwym kierunku, sygnaģ nawigacyjny znajduje się w polu RDF zerowym, a siģa odbieranego sygnaģu wynosi zero, jak pokazano na towarzyszącym wykresie wspóģrzędnych biegunowych. Jeķli robot zboczy z kursu, sygnaģ nawigacyjny nie znajduje się juŋ w wartoķci zerowej, a odbiornik RDF odbiera sygnaģ. Ten sygnaģ trafia do kontrolera robota, który steruje robotem w lewo i prawo, dopóki sygnaģ nawigacyjny ponownie nie spadnie do zera.
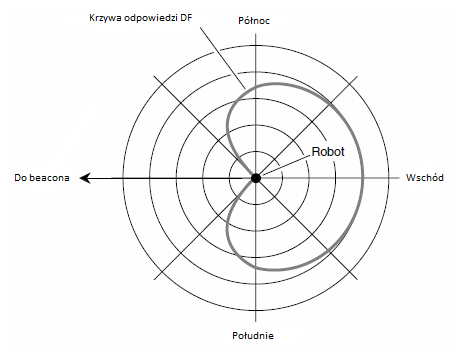
ERROR SIGNAL [SYGNAĢ BĢĘDU]
Sygnaģ bģędu to napięcie generowane przez obwód wykrywający bģąd. Sygnaģ ten pojawia się, gdy wyjķcie urządzenia róŋni się od wartoķci odniesienia. Sygnaģy bģędu mogą byæ stosowane w systemach czysto elektronicznych, a takŋe w systemach elektromechanicznych. W urządzeniu RDF, dane wyjķciowe mogą wyglądaæ jak wykres wspóģrzędnych biegunowych pokazany na ilustracji. Jeķli robot jest skierowany na kurs, sygnaģ bģędu wynosi zero. Jeķli jest on zboczony z kursu, w lewo lub w prawo, generowane jest dodatnie napięcie sygnaģu bģędu, jak pokazano na doģączonym wykresie wspóģrzędnych prostokątnych. Napięcie zaleŋy od tego, jak daleko biegnie robot. Zasadniczo wraz ze wzrostem bģędu kursu roķnie siģa sygnaģu bģędu. Obwód szukania kierunku jest zaprojektowany do wyszukiwania i utrzymywania kursu tak, aby sygnaģ bģędu zawsze wynosiģ zero. Aby to zrobiæ, sygnaģ bģędu jest wykorzystywany przez sterownik robota do zmiany kursu. Jest to ta sama zasada, na której znajduje się ukryty nadajnik radiowy.
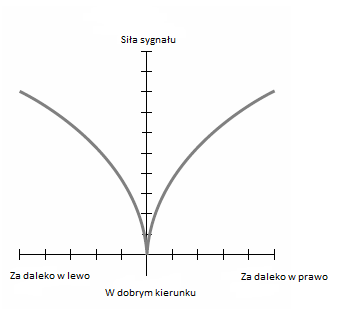
EGZOSZKIELET
Egzoszkielet to ramię robota, które wykorzystuje geometrię przegubową do naķladowania ruchów ludzkiego ramienia, i którego ruchy są kontrolowane bezpoķrednio przez ruchy ramienia ludzkiego operatora. Takie urządzenia mogą byæ uŋywane podczas pracy z materiaģami niebezpiecznymi. Przydają się równieŋ jako protezy (sztuczne koņczyny). Termin egzoszkielet odnosi się równieŋ do wyspecjalizowanego robota, który jest jak garnitur-zbroja, którą czģowiek moŋe nosiæ, i która moŋe zwiększyæ przemieszczenie i / lub siģę ruchu, co skutkuje siģą fizyczną znacznie przekraczającą siģę zwykģego męŋczyzny lub kobiety. Kobieta moŋe na przykģad podnieķæ samochód nad gģowę; stalowa rama egzoszkieletu uniesie cięŋar i nacisk. Męŋczyzna moŋe rzuciæ baseball na kilometr. Pancerz moŋe chroniæ przed uderzeniami, ogniem, a moŋe nawet kulami. Do tej pory peģne egzoszkielety byģy wdraŋane gģównie w opowiadaniach science fiction. Peģny egzoszkielet róŋni się od systemu teleobecnoķci. W teleobecnoķci ludzki operator nie znajduje się w tym samym miejscu co robot. Ale kiedy czģowiek nosi egzoszkielet, jest na miejscu z maszyną. Jest to zarówno atut, jak i zobowiązanie: pozwala na większą kontrolę i lepsze wyczucie ķrodowiska pracy, ale w niektórych przypadkach moŋe naraziæ operatora na niebezpieczeņstwo.
EKSPERCKI SYSTEM
System ekspercki to schemat rozumowania komputerowego, znany równieŋ jako system oparty na reguģach. W sterowaniu inteligentnymi robotami wykorzystywane są systemy eksperckie. Moŋna je równieŋ stosowaæ w komputerach autonomicznych. Rysunek jest schematem blokowym typowego systemu eksperckiego. Sercem urządzenia jest zestaw faktów i zasad. W przypadku systemu robotycznego fakty skģadają się z danych o ķrodowisku robota, takim jak fabryka, biuro lub kuchnia. Reguģy to instrukcje w postaci logicznej "Jeķli X, to Y", podobne do instrukcji w językach programowania wysokiego poziomu. Mechanizm wnioskowania decyduje, które reguģy logiczne naleŋy zastosowaæ w róŋnych sytuacjach. Następnie instruuje robota (robotów), aby wykonaģ okreķlone zadania. Jednak dziaģanie systemu moŋe byæ tak wyrafinowane, jak dane dostarczane przez ludzkich programistów.
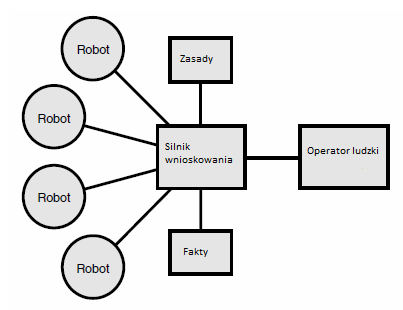
Systemy komputerowe mogą byæ uŋywane w komputerach, aby pomóc ludziom w badaniach, podejmowaniu decyzji i generowaniu prognoz. Dobrym przykģadem jest program, który pomaga lekarzowi w postawieniu diagnozy. Komputer zadaje pytania i dochodzi do wniosku opartego na odpowiedziach udzielonych przez pacjenta i lekarza. Jedną z największych zalet systemów eksperckich jest ģatwoķæ przeprogramowania. W miarę zmiany ķrodowiska robot moŋe nauczyæ się nowych zasad i otrzymywaæ nowe fakty
EXTENSIBILITY [ROZCIĄGLIWOĶÆ]
Rozciągalnoķæ, zwana takŋe rozszerzalnoķcią, odnosi się do ģatwoķci, z jaką system robotyczny moŋe byæ modyfikowany w celu wykonania większej liczby lub większej róŋnorodnoķci zadaņ niŋ te dozwolone w pierwotnym projekcie. Rozszerzalnoķæ systemu zrobotyzowanego zaleŋy od róŋnych czynników, w tym od rodzaju sprzętu, pamięci sterownika, miejsca przechowywania danych sterownika oraz szybkoķci przetwarzania sterownika. Rozszerzalnoķæ jest zwiększona dzięki zastosowaniu moduģowej konstrukcji i znormalizowanych częķci.
EKSTRAPOLACJA
Gdy dane są dostępne w okreķlonym zakresie, moŋna oszacowaæ wartoķci poza tym zakresem za pomocą techniki zwanej ekstrapolacją. Moŋna to nauczyæ zgadywania, ale moŋna to równieŋ zrobiæ za pomocą komputera. Im bardziej wyrafinowane oprogramowanie komputerowe, tym dokģadniej moŋe ono ekstrapolowaæ. Przykģadem ekstrapolacji jest przewidywana ķcieŋka huraganu zbliŋającego się do linii brzegowej. Znając swoją ķcieŋkę do chwili obecnej, komputer opracowuje szereg moŋliwych przyszģych ķcieŋek. Czynniki, które moŋna zaprogramowaæ w komputerze, aby pomóc mu dokonaæ dokģadnej ekstrapolacji, obejmują:
• Ķcieŋki huraganów w poprzednich latach, które zbliŋaģy się w podobny sposób
• Prądy sterujące w górnej atmosferze
• Warunki pogodowe na ogólnej ķcieŋce burzy
Im dalej (w przyszģoķæ) dokonywana jest ekstrapolacja, tym mniej dokģadne są wyniki. Podczas gdy komputer pogodowy moŋe zrobiæ dobrą robotę przewidując ķcieŋkę huraganu 24 godziny wczeķniej, ŋadna jeszcze maszyna nie jest w stanie dokģadnie okreķliæ, gdzie będzie burza w ciągu tygodnia.
EYE-IN-HAND SYSTEM
Aby chwytak robota znalazģ drogę, w mechanizmie chwytaka moŋna umieķciæ kamerę. Aparat musi byæ przystosowany do pracy z bliskiej odlegģoķci, od okoģo 1 m do kilku milimetrów. Bģąd pozycjonowania musi byæ jak najmniejszy, najlepiej mniejszy niŋ 0,5 mm. Aby mieæ pewnoķæ, ŋe kamera uzyska dobry obraz, lampa wraz z kamerą znajduje się w chwytaku (patrz rysunek). Tak zwany system oko w rękę moŋe byæ uŋyty do dokģadnego zmierzenia, jak blisko chwytak jest do szukanego obiektu. Moŋe równieŋ dokonaæ pozytywnej identyfikacji obiektu, aby chwytak nie poszedģ za niewģaķciwą rzeczą. System oko w rękę wykorzystuje serwomechanizm. Robot jest wyposaŋony lub ma dostęp do kontrolera, który przetwarza dane z kamery i wysyģa instrukcje z powrotem do chwytaka
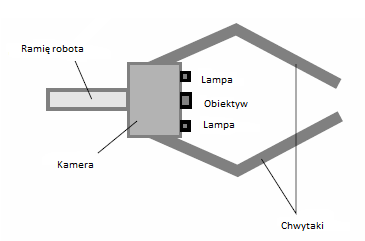
Czujniki nie zawsze reagują zgodnie z przeznaczeniem na bodžce lub percepcje w otoczeniu. Moŋe się to zdarzyæ z róŋnych powodów i jest znane jako faģszywie negatywne. I odwrotnie, czujniki czasami wytwarzają sygnaģ wyjķciowy, gdy nie ma uzasadnionego postrzegania; to jest faģszywie pozytywne. Rozwaŋ czujnik na podczerwieņ (IR). Zaģóŋmy, ŋe jest on najbardziej czuģy przy dģugoķci fali 1350 nm (nanometrów). Faģszywie ujemne są najmniej prawdopodobne dla percepcji przy tej dģugoķci fali. Gdy dģugoķæ fali odbiega od 1350 nm, czuģoķæ maleje, a promieniowanie musi byæ bardziej intensywne, aby czujnik wytworzyģ sygnaģ wyjķciowy. Prawdopodobieņstwo faģszywych negatywów wzrasta, gdy dģugoķæ fali staje się dģuŋsza lub krótsza niŋ 1350 nm. Poza pewnym zakresem dģugoķci fal czujnik jest względnie niewraŋliwy, a zatem faģszywe negatywy są raczej reguģą niŋ wyjątkiem. faģszywie ujemny zaleŋy jednak od zakresu dģugoķci fal, które są zdefiniowane jako "uzasadnione" postrzeganie. Zaģóŋmy, ŋe czujnik w powyŋszym przykģadzie jest częķcią urządzenia detekcji zbliŋeniowej w robocie mobilnym. Laser na robocie, dziaģający przy dģugoķci fali 1350 nm, odbija się od pobliskich obiektów w ķrodowisku pracy. Odbicia są wychwytywane przez czujnik, który jest przykryty filtrem IR, który z ģatwoķcią przepuszcza promieniowanie w zakresie od 1300 do 1400 nm, ale blokuje większoķæ energii poza tym zakresem. Jeķli sygnaģ wyjķciowy czujnika przekroczy okreķlony poziom, kontroler robota otrzymuje polecenie zmiany kierunku, aby uniknąæ uderzenia w moŋliwą przeszkodę. Zewnętrzne žródģa podczerwieni mogą powodowaæ faģszywie dodatnie wyniki. Jest to najbardziej prawdopodobne, jeķli zewnętrzna podczerwieņ ma dģugoķæ fali w pobliŋu obszaru czuģoķci szczytowej czujnika / filtra, tj. Od 1300 do 1400 m. Jeķli jednak postrzeganie zewnętrzne jest wystarczająco intensywne, moŋe powodowaæ faģszywie dodatni nawet jeŋeli jego dģugoķæ fali jest znacznie mniejsza niŋ 1300 nm lub większa niŋ 1400 nm. Kontrolery robotów moŋna zaprogramowaæ w taki sposób, aby ignorowaģy faģszywe negatywy lub pozytywy, o ile istnieje jakiķ sposób na odróŋnienie ich od "uzasadnionych" poglądów. Jednak w žle zaprojektowanym systemie faģszywe negatywy lub pozytywy mogą powodowaæ nieprawidģowe dziaģanie.
FAULT RESILIENCE [ODPORNOĶÆ NA AWARIE]
Termin "odpornoķæ na awarie" moŋe odnosiæ się do jednej z dwóch róŋnych cech skomputeryzowanego systemu robotycznego. Pierwszy rodzaj systemu odpornego na uszkodzenia moŋna równieŋ nazwaæ odpornym na sabotaŋ. Zaģóŋmy, ŋe wszystkie strategiczne (nuklearne) mechanizmy obronne Stanów Zjednoczonych znajdują się pod kontrolą komputera. Konieczne jest, aby byģo to niemoŋliwe dla osób nieupowaŋnionych, aby go wyģączyæ. Systemy tworzenia kopii zapasowych są konieczne. Bez względu na to, co ktoķ próbuje zrobiæ, aby spowodowaæ awarię systemu lub przestaæ dziaģaæ, system musi byæ w stanie oprzeæ się lub pokonaæ taki atak. Niektórzy inŋynierowie mają wątpliwoķci, czy moŋna zbudowaæ komputer caģkowicie sabotaŋowy. Cytują powiedzenie: "Zbuduj system bardziej odporny na przestępstwa, a dostaniesz mądrzejszych przestępców". Ponadto kaŋdy taki system musiaģby byæ zaprojektowany i zbudowany przez ludzi. Co najmniej jedna z tych osób moŋe zostaæ przekupiona lub szantaŋowana w celu ujawnienia informacji na temat tego, jak pokonaæ przepisy bezpieczeņstwa. I oczywiķcie nikt nie jest w stanie przewidzieæ wszystkich rzeczy, które mogą pójķæ nie tak z systemem. Zgodnie z prawem Murphy'ego, które jest zwykle wypowiadane z przymruŋeniem oka, ale które często moŋe objawiaæ się jako prawda: "Jeķli coķ pójdzie nie tak, to zrobi to". Następstwem, rzadziej sģyszanym, ale byæ moŋe równie prawdziwym, jest "Jeķli coķ nie moŋe pójķæ nie tak. Drugi rodzaj odpornoķci na uszkodzenia znany jest równieŋ jako peģna wdzięku degradacja. Wiele komputerów, a takŋe sterowane komputerowo systemy robotyczne są zaprojektowane tak, ŋe jeķli niektóre częķci ulegną awarii, system nadal dziaģa, chociaŋ byæ moŋe przy zmniejszonej wydajnoķci i prędkoķci.
FEEDBACK [SPRZĘŊENIE ZWROTNE]
Sprzęŋenie zwrotne jest ķrodkiem, za pomocą którego system zamkniętej pętli sam się reguluje. Informacje zwrotne są szeroko stosowane w robotyce. Przykģad sprzęŋenia zwrotnego moŋna znaležæ w prostym mechanizmie termostatu, podģączonym do urządzenia grzewczego / chģodzącego. Zaģóŋmy, ŋe termostat jest ustawiony na 20 stopni Celsjusza (20o C). Jeķli temperatura wzroķnie znacznie powyŋej 20o C, do urządzenia grzewczego / chģodzącego wysyģany jest sygnaģ informujący o ochģodzeniu powietrza w pomieszczeniu. Jeķli temperatura spadnie znacznie poniŋej 20o C, sygnaģ nakazuje urządzeniu ogrzanie pomieszczenia. Proces ten ilustruje schemat blokowy. W systemie, który wykorzystuje sprzęŋenie zwrotne do stabilizacji, musi istnieæ pewna swoboda między przeciwnymi funkcjami. W przypadku termostatu kontrolowany system ogrzewania / chģodzenia, jeķli oba progi są ustawione na dokģadnie 20oC, system będzie stale i szybko przeģączaģ się między grzaniem i chģodzeniem. Typowy zakres moŋe wynosiæ od 18 do 22o C. Swoboda nie powinna byæ jednak zbyt szeroka.
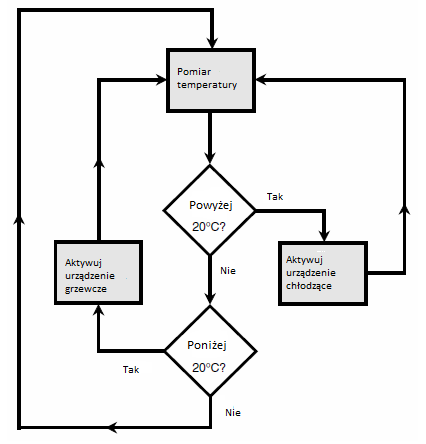
FIBER-OPTIC CABLE [ĶWIATĢOWÓD]
Kabel ķwiatģowodowy to pakiet przezroczystych, peģnych pasm zaprojektowanych do przenoszenia modulowanego ķwiatģa lub podczerwieni (IR). Ten typ kabla moŋe przenosiæ miliony sygnaģów przy duŋej przepustowoķci.
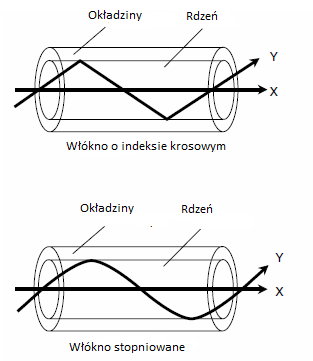
Produkcja
Wģókna ķwiatģowodowe są wykonane ze szkģa, do którego dodano zanieczyszczenia, aby zmaksymalizowaæ przezroczystoķæ przy pewnych dģugoķciach fal. Zanieczyszczenia optymalizują równieŋ wspóģczynnik zaģamania szkģa lub stopieņ, w jakim spowalnia i zgina ķwiatģo. Ķwiatģowód ma rdzeņ otoczony rurowym pģaszczem, jak pokazano na ilustracjach. Okģadzina ma niŋszy wspóģczynnik zaģamania ķwiatģa niŋ rdzeņ. W ķwiatģowodzie o indeksie skokowym (rysunek od góry) rdzeņ ma jednolity wspóģczynnik zaģamania ķwiatģa, a okģadzina ma niŋszy wskažnik, równieŋ jednolity. Przejķcie na granicy jest nagģe. W ķwiatģowodzie o stopniowanym wspóģczynniku (rysunek niŋszy) rdzeņ ma wspóģczynnik zaģamania ķwiatģa, który jest największy wzdģuŋ osi ķrodkowej i stale maleje na zewnątrz od ķrodka. Na granicy następuje gwaģtowny spadek wspóģczynnika zaģamania ķwiatģa.
Operacja
Na górnej ilustracji, pokazując wģókno o wskažniku krokowym, promieņ X wchodzi do rdzenia równolegle do osi wģókna i przemieszcza się bez uderzania w granicę, chyba ŋe we wģóknie jest wygięcie. Jeķli jest zakręt, promieņ X odchyla się od ķrodka i zachowuje się jak Y. Ray Y wielokrotnie uderza w granicę. Za kaŋdym razem, gdy promieņ Y napotyka granicę, następuje caģkowite odbicie wewnętrzne, więc promieņ Y pozostaje w rdzeniu. Na dolnym rysunku, pokazując wģókno o stopniowanym indeksie, promieņ X wchodzi do rdzenia równolegle do osi wģókna i przemieszcza się bez uderzania w granicę, chyba ŋe we wģóknie jest wygięcie. Jeķli jest zakręt, promieņ X odchyla się od ķrodka i zachowuje się jak promieņ Y. Gdy promieņ Y przesuwa się dalej od ķrodka rdzenia, wspóģczynnik zaģamania zmniejsza się, zginając promieņ z powrotem w kierunku ķrodka. Jeķli promieņ Y wejdzie pod wystarczająco ostrym kątem, moŋe uderzyæ w granicę, w którym to przypadku nastąpi caģkowite odbicie wewnętrzne. Dlatego promieņ Y pozostaje w rdzeniu.
Wiązanie
Ķwiatģowody mogą byæ wiązane w kabel w taki sam sposób, jak przewody w wiązce. Poszczególne wģókna są chronione przed uszkodzeniem przez plastikową otoczkę . Powszechnymi pokryciami są polietylen i poliuretan. Stal , druty lub inne mocne materiaģy są często stosowane w celu zwiększenia wytrzymaģoķci kabla. Caģy pakiet jest zamknięty w zewnętrznej kurtce. To pokrycie zewnętrzne moŋna wzmocniæ siatką drucianą i / lub pokryæ materiaģami odpornymi na korozję. Kaŋde wģókno w wiązce moŋe przenosiæ kilka promieni ķwiatģa widzialnego i / lub podczerwieni (IR), przy czym kaŋdy promieņ ma inną dģugoķæ fali. Kaŋdy promieņ moŋe z kolei zawieraæ duŋą liczbę sygnaģów. Poniewaŋ częstotliwoķci ķwiatģa widzialnego i IR są znacznie wyŋsze niŋ częstotliwoķci prądów o częstotliwoķci radiowej (RF), szerokoķæ pasma ģącza kablowego optycznego / IR moŋe byæ znacznie większa niŋ dowolnego ģącza kablowego RF. Pozwala to na znacznie większą prędkoķæ danych.
FIELD OF VIEW [POLE WIDZENIA ](FOV)
Pole widzenia (FOV) czujnika kierunkowego jest iloķciowym wyraŋeniem zakresu kątowego, w którym prawidģowo reaguje na bodžce lub postrzega. FOV jest zdefiniowany w kategoriach kątów x i y (gģównych i mniejszych) i dotyczy przede wszystkim czujników jednokierunkowych (to znaczy urządzeņ przeznaczonych do pobierania energii z jednego kierunku). Kąty te moŋna zdefiniowaæ jako promieniowe w stosunku do osi, na której czujnik reaguje najbardziej, lub ķrednicowe (dwukrotnoķæ wartoķci promieniowej). Pozioma FOV czujnika przyjmuje ksztaģt stoŋka w przestrzeni trójwymiarowej (3-D), z wierzchoģkiem na czujniku, jak pokazano na ilustracji. Stoŋek ten niekoniecznie ma taki sam kąt pochylenia we wszystkich pģaszczyznach przechodzących przez jego oķ. Jak "widziany" z punktu widzenia samego czujnika, stoŋek pojawia się jako okrąg lub elipsa na obrazie ķrodowiska pracy. Jeķli stoŋek FOV jest okrągģy, wówczas kąty xiy są takie same. Jeķli stoŋek FOV jest eliptyczny, wówczas kąty x i y są róŋne.
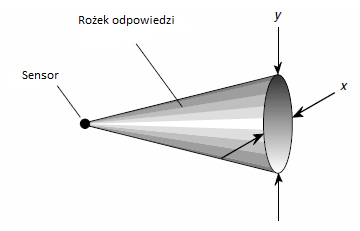
FINE MOTION PLANNING [PLANOWANIE PRECYZYJNEGO RUCHU]
Planowanie precyzyjnego ruchu odnosi się do schematu zastosowanego przez robota w celu uzyskania dokģadnie wģaķciwej pozycji. Zaģóŋmy, ŋe osobistemu robotowi nakazuje się wģączyæ ķwiatģo na korytarzu. Wģącznik ķwiatģa znajduje się na ķcianie. Kontroler robota ma komputerową mapę domu, która obejmuje lokalizację wģącznika ķwiatģa na korytarzu. Robot przechodzi do ogólnej lokalizacji przeģącznika i sięga do ķciany. Skąd dokģadnie wie, gdzie znaležæ przeģącznik i jak dokģadnie ustawiæ chwytak, aby przesunąģ przeģącznik na przeģączniku? Jedną z metod jest wģączenie widzenia robota, takiego jak system oko w rękę. Dzięki temu robot rozpoznaje ksztaģt przeģącznika i odpowiednio się prowadzi. Inna metoda polega na zastosowaniu wyczuwania dotykowego, aby efektor koņcowy mógģ "wyczuæ" wzdģuŋ ķciany w sposób podobny do tego, w jaki czģowiek znalazģby i uruchomiģ przeģącznik z zamkniętymi oczami. Jeszcze inny schemat moŋe obejmowaæ wysoce precyzyjny, pomniejszony epipolarny schemat nawigacji.
FIRE-PROTECTION ROBOT [ROBOT OCHRONY PRZECIWPOŊAROWEJ]
Jedną z ról, do której szczególnie dobrze nadają się roboty, jest gaszenie poŋarów. Gdyby wszyscy straŋacy byli robotami, w tym zawodzie nie byģoby ryzyka dla ŋycia ludzkiego. Roboty moŋna zbudowaæ tak, aby byģy odporne na znacznie wyŋsze temperatury niŋ ludzie mogą tolerowaæ. Roboty nie cierpią z powodu wdychania dymu. Gģównym wyzwaniem jest zaprogramowanie robotów do wykonywania osądu tak samo bystrego, jak u ludzi, w wielu róŋnych sytuacjach. Jednym ze sposobów obsģugi robotów przeciwpoŋarowych jest umieszczenie ludzi w odlegģych punktach i wyposaŋenie maszyn w teleobecnoķæ. Operator siedzi przy zestawie elementów sterujących lub nosi kombinezon caģego ciaģa z wbudowanymi elementami sterującymi. Gdy operator porusza się w okreķlony sposób, robot porusza się dokģadnie w ten sam sposób. Kamery telewizyjne robota przesyģają obrazy do operatora. Operator moŋe "wirtualnie" iķæ tam, gdzie idzie robot, bez ŋadnego ryzyka z tym związanego. Jednym z podstawowych obowiązków domowych robotów jest zapewnienie
bezpieczeņstwa pasaŋerom. Musi to obejmowaæ eskortowanie ludzi z domu, jeķli się zapali, a następnie zgaszenie ognia i / lub wezwanie straŋy poŋarnej. Moŋe to równieŋ wymagaæ wykonania niektórych zadaņ pierwszej pomocy.
FIRMWARE
Oprogramowanie ukģadowe to termin odnoszący się do programów komputerowych zainstalowanych na staģe w systemie. Zwykle odbywa się to w pamięci tylko do odczytu (ROM). Oprogramowanie wewnętrzne komputera moŋna zmieniæ, ale wymaga to zmiany sprzętowej. Moŋe to oznaczaæ fizyczną wymianę ukģadu scalonego (IC), ale istnieją urządzenia, których oprogramowanie wewnętrzne moŋna usunąæ, a następnie przeprogramowaæ. Są to tak zwane kasowalne programowalne ukģady pamięci tylko do odczytu (EPROM). Potrzebny jest specjalny sprzęt do zmiany zawartoķci EPROM. Programowanie oprogramowania ukģadowego jest powszechne w urządzeniach i maszynach kontrolowanych przez mikrokomputer, takich jak roboty o staģej sekwencji, które wielokrotnie wykonują dane zadanie.
FIXED-SEQUENCE ROBOT [ROBOT O STAĢEJ SEKWENCJI]
Robot o staģej sekwencji to robot, który wykonuje jedno, wstępnie zaprogramowane zadanie lub zestaw zadaņ, wykonując dokģadnie takie same ruchy za kaŋdym razem. Nie ma wyjątku ani zmiany w procedurze. Roboty o staģej sekwencji idealnie nadają się do pracy na linii montaŋowej. Zabawnym przykģadem robota o staģej sekwencji jest zabawka, która przechodzi pewną rutynę po kaŋdym naciķnięciu przycisku. Te maszyny są szczególnie popularne w Japonii. W niektórych przypadkach takie zabawkowe roboty wyglądają na wyrafinowane.
FLEXIBLE AUTOMATION [ELASTYCZNA AUTOMATYZACJA]
Elastyczna automatyzacja odnosi się do zdolnoķci robota lub systemu do wykonywania róŋnych zadaņ. Aby przejķæ z jednego zadania do drugiego, wystarczy prosta zmiana oprogramowania lub zmiana poleceņ wprowadzanych do kontrolera. Prostym przykģadem elastycznej automatyzacji jest ramię robota, które moŋna zaprogramowaæ do wstawiania ķrub, wiercenia otworów, piasku, spawania, wkģadania nitów i natryskiwania farb na przedmioty na linii montaŋowej. W miarę ewolucji robotów osobistych stają się one w stanie robiæ wiele rzeczy na podstawie jednego, wyrafinowanego programu. Jest to najwyŋszy poziom elastycznej automatyzacji i moŋna go uznaæ za formę sztucznej inteligencji (AI). Odpowiednie dziaģania wynikają z poleceņ sģownych. Wymaga to moŋliwoķci rozpoznawania mowy, a takŋe znacznej pamięci kontrolera, szybkoķci i mocy przetwarzania
FLIGHT TELEROBOTIC SERVICER [LOTNICZY SERWIS TELEROBOTYCZNY]
W misjach kosmicznych często konieczne jest wykonywanie napraw i ogólnej konserwacji w statku kosmicznym i wokóģ niego. Nie zawsze opģacalne jest, aby astronauci wykonywali tę pracę. Z tego powodu rozwaŋano róŋne konstrukcje robota zwanego lotniczym telerobotycznym serwis (FTS). FTS to zdalnie sterowany robot. Zakres, w jakim jest kontrolowany, zaleŋy od projektu. Najprostsze maszyny FTS są programowalne z gģównego komputera statku kosmicznego. Bardziej zģoŋone urządzenia FTS wykorzystują teleobecnoķæ. Ze względu na ryzyko związane z wysyģaniem ludzi w kosmos naukowcy rozwaŋali pomysģ uruchomienia promów kosmicznych pilotowanych przez FTS w celu ich rozmieszczenia lub napraw satelity. FTS będą kontrolowane przez komputery na ziemi i w statku kosmicznym. Jeden projekt FTS ma wygląd jednonogiego, bezgģowego Androida, jak pokazano na ilustracji.
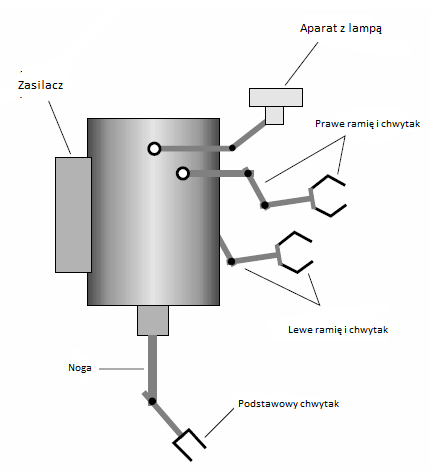
FLOWCHART
Schemat blokowy to schemat ilustrujący logiczny proces lub program komputerowy. To jest schemat blokowy. Ramki wskazują warunki, diamenty wskazują punkty decyzyjne, a strzaģki pokazują kroki proceduralne. Schematy blokowe sģuŋą do opracowywania oprogramowania komputerowego. Sģuŋą równieŋ do rozwiązywania problemów ze zģoŋonym sprzętem. Schematy blokowe dobrze nadają się do aplikacji robotycznych, poniewaŋ wskazują wybory, których musi dokonaæ robot podczas wykonywania zadania. Schemat blokowy musi zawsze reprezentowaæ peģny proces. Nie powinno byæ miejsc, w których technik, komputer lub robot zostanie pozostawiony bez podjęcia jakiejkolwiek decyzji. Nie mogą istnieæ nieskoņczone pętle, w których proces przebiega w nieskoņczonych kręgach, nie osiągając niczego.
FLUXGATE MAGNETOMETR
Magnetometr fluxgate to skomputeryzowany system prowadzenia robota, który wykorzystuje pola magnetyczne do uzyskiwania danych o poģoŋeniu i orientacji. Urządzenie wykorzystuje cewki do wykrywania zmian w polu geomagnetycznym (ziemskim polu magnetycznym) lub w sztucznie generowanym polu odniesienia. Nawigacja w obrębie okreķlonego obszaru moŋe odbywaæ się poprzez ciągģą analizę orientacji i intensywnoķci pola strumienia magnetycznego generowanego przez strategicznie rozmieszczone elektromagnesy. Komputerowa mapa pola strumienia, pokazująca dwa elektromagnesy i hipotetycznego robota w polu, pokazano na ilustracji. W tym przypadku przeciwne bieguny magnetyczne (póģnoc i poģudnie) są skierowane ku sobie, nadając polu strumienia charakterystyczny ksztaģt pręta-magnesu. Dla kaŋdego punktu w ķrodowisku pracy strumieņ magnetyczny ma unikalną orientację i intensywnoķæ. Dlatego istnieje zgodnoķæ jeden do jednego między warunkami strumienia magnetycznego a kaŋdym punktem w otoczeniu. Sterownik robota jest zaprogramowany do "znajomoķci" tej relacji dokģadnie dla wszystkich punktów w otoczeniu. Pozwala to robotowi wskazaæ swoje poģoŋenie w przestrzeni trójwymiarowej (3-D), pod warunkiem ustalenia zestawu wspóģrzędnych odniesienia.
FLYING EYEBALL [LATAJĄCA GAĢKA OCZNA]
Latająca gaģka oczna jest prostą formą robota podwodnego. Ten robot moŋe rozwiązywaæ szczegóģy pod wodą, a takŋe moŋe się poruszaæ. Nie moŋe niczego manipulowaæ; nie ma ramion robota ani efektorów koņcowych. Latające gaģki oczne są uŋywane w zastosowaniach naukowych i wojskowych. Kabel zawierający robota w specjalnej obudowie wyrzutni jest zrzucany z ģodzi. Gdy wyrzutnia osiągnie ŋądaną gģębokoķæ, wypuszcza robota, który jest poģączony z wyrzutnią za pomocą paska, jak pokazano na ilustracji. Tether i kabel upuszczający przekazują dane z powrotem do ģodzi. Robot zawiera kamerę wideo i jedną lub więcej lamp do oķwietlania podwodnego ķrodowiska. Ma równieŋ zestaw pędników lub ķmigieģ, które pozwalają mu poruszaæ się zgodnie z poleceniami sterującymi przesyģanymi przez kabel i kabel. Ludzcy operatorzy na pokģadzie ģodzi mogą oglądaæ obrazy z kamery telewizyjnej i poprowadziæ robota podczas badania obiektów na dnie morza. W niektórych przypadkach uwięzi moŋna wyeliminowaæ, a do przesyģania danych z robota do wyrzutni moŋna uŋyæ wiązek radiowych (RF), podczerwieni (IR) lub widzialnych. Dzięki temu robot ma większą swobodę ruchu, bez obawy, ŋe uwięzi mogą się w coķ zaplątaæ. Jednak zasięg RF, IR lub ģącza jest ograniczony, poniewaŋ woda nie rozprzestrzenia tych form energii na duŋe odlegģoķci.
FOOD-SERVICE ROBOT [ROBOT SPOŊYWCZY]
Roboty mogą sģuŋyæ do przygotowywania i serwowania jedzenia. Gģówne zastosowania to powtarzalne prace, takie jak umieszczanie odmierzonych porcji na talerzach, styl linii montaŋowej, aby sģuŋyæ duŋej liczbie osób. Roboty gastronomiczne są równieŋ wykorzystywane w zakģadach konserwujących i butelkujących, poniewaŋ te zadania są proste, powtarzalne, przyziemne i ģatwe do zaprogramowania. W miarę upģywu rzędu butelek na przykģad jeden robot napeģnia kaŋdą butelkę. Następnie maszyna sprawdza, czy kaŋda butelka jest napeģniona do odpowiedniego poziomu. Odrzuty są wyrzucane przez innego robota. Jeszcze inny robot umieszcza nakrętki na butelkach Roboty osobiste, gdy są zaprogramowane do przygotowywania lub serwowania ŋywnoķci, wymagają większej autonomii niŋ roboty w duŋych iloķciach ŋywnoķci. Domowego robota moŋna zaprogramowaæ do przygotowywania posiģku z mięsa, warzyw i napojów. Robot zadaje takie pytania:
• Ile osób będzie na ten posiģek?
• Jakiego rodzaju mięso ma byæ podawane?
• Jaki rodzaj warzyw ma byæ podawany?
• Jak chciaģbyķ zrobiæ ziemniaki? A moŋe wolisz ryŋ?
• Jakie napoje chciaģbyķ?
Po otrzymaniu wszystkich odpowiedzi robot wykona zadanie przygotowania posiģku. Robot moŋe równieŋ podaæ posiģek, a następnie posprzątaæ stóģ i umyæ naczynia póžniej.
FORESHORTENING
W zrobotyzowanym systemie pomiaru odlegģoķci skrócenie czasu jest faģszywym wskažnikiem odlegģoķci między robotem a barierą, mierzonej wzdģuŋ okreķlonej linii prostej przez przestrzeņ trójwymiarową (3D). Zjawisko to moŋe wystąpiæ, gdy bariera jest ustawiona pod ostrym kątem w stosunku do kierunku, w którym ma zostaæ osiągnięte namiar zasięgu. Sonar jest szczególnie podatny na problem, poniewaŋ trudno jest skupiæ fale akustyczne na wąskich wiązkach. Ilustracja pokazuje wymiarowo zredukowany przykģad tego, w jaki sposób moŋe nastąpiæ skrócenie. Robot jest pokazany jako zacieniony okrąg po lewej stronie. Jego kierunek podróŋy i preferowany kierunek (oķ) urządzenia sonarowego są skierowane bezpoķrednio od lewej do prawej (poziomo na tym rysunku). Sonar powinien idealnie wytwarzaæ wskazanie zasięgu, które jest takie samo jak rzeczywisty zasięg lub odlegģoķæ, którą robot musi przebyæ, zanim wpadnie na barierę. Jednak pole widzenia (FOV) sonaru wynosi 30 ° lub 15 ° po obu stronach osi. Skrajna prawa krawędž wiązki sonaru uderza w barierę przed ķrodkową częķcią wiązki. Zakģadając, ŋe bariera ma powierzchnię wystarczająco nieregularną, aby rozpraszaæ fale akustyczne we wszystkich kierunkach, więc robot odbiera echo ze wszystkich częķci wiązki sonaru, pozorny zasięg jest znacznie mniejszy niŋ rzeczywisty zasięg. Jedynym rozwiązaniem tego rodzaju problemów w zakresie skrócenia jest zminimalizowanie pola widzenia sprzętu dystansowego. W ķrodowisku pracy, takim jak to pokazane na rysunku, lepiej byģoby sporządziæ komputerową mapę otoczenia, uŋywając systemu bardziej zaawansowanego niŋ sonar.
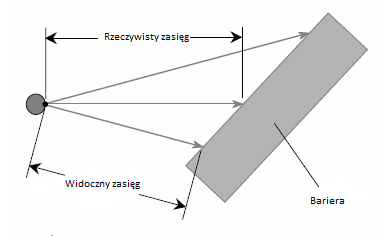
FORWARD CHAINING [ĢĄCZENIE DO PRZODU]
Komputer moŋe dziaģaæ jako osoba znająca pewne dziedziny, na przykģad inŋynieria, prognozy pogody, medycyna, a nawet gieģda. Programy, dzięki którym komputery zachowują się jak specjaliķci, nazywane są systemami ekspertowymi. Podczas uruchamiania systemu eksperckiego dostarczasz komputerowi informacje, a komputer rozwiązuje problem na podstawie tych informacji. Istnieją dwa sposoby dostarczenia danych podczas korzystania z systemu eksperckiego. Moŋesz wprowadzaæ fakty pojedynczo, na ŋądanie komputera; lub moŋesz wprowadziæ wszystkie dane jednoczeķnie, zanim program zacznie pracowaæ nad rozwiązaniem. Druga metoda to ģączenie w przód. Ģaņcuch rozumowania rozpoczyna się od jednego zestawu faktów i dziaģa do momentu rozwiązania problemu lub wyciągnięcia wniosku. Po tym, jak komputer otrzyma dane w systemie eksperckim z ģaņcuchem do przodu, silnik wnioskowania korzysta z reguģ zapisanych w oprogramowaniu, aby wnioskowaæ o rozwiązaniu lub konkluzji. Jeķli konieczne są dodatkowe informacje, komputer poinformuje operatora, zwykle zadając okreķlone pytania.
FRAME [RAMA]
Rama jest mentalnym symbolem, ķrodkiem do reprezentowania zestawu rzeczy. Ramy moŋna wyobraziæ sobie jako "okna w umyķle". W sztucznej inteligencji (AI) obiekty i procesy moŋna podzieliæ na kategorie w ramkach. Zaģóŋmy, ŋe robotowi wydano polecenie: "Idž do kuchni i nalej trochę wody do papierowego kubka". Robot przechodzi szereg dedukcji dotyczących tego, jak zdobyæ ten napój i jak zdobyæ przedmiot, w którym ma byæ zawarty
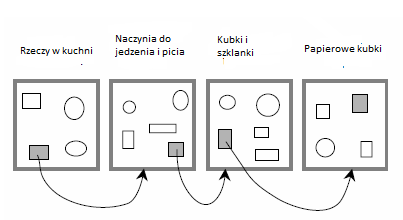
Najpierw robot idzie do kuchni. Następnie rozpoczyna wyszukiwanie okreķlonego rodzaju pojemnika na napój, który zostaģ okreķlony, w tym przypadku kubka papierowego. Ilustracja przedstawia ten proces. Pierwsza ramka reprezentuje wszystkie przedmioty w kuchni. W tej ramce wybiera się ramkę pomocniczą: naczynia do jedzenia i picia. W tej ramie odpowiednia ramka zawiera kubki i szklanki; w ramach tej ramki poŋądaną kategorią są papierowe kubki. Nawet ten podzbiór moŋna dalej rozbiæ. Moŋna okreķliæ 12-uncjowe kubki papierowe, w kolorze biaģym, zaprojektowane tak, aby wytrzymywaģy gorące i zimne napoje. Ramki mogą mieæ zastosowanie zarówno do procedur, jak i do wyboru obiektów. Gdy robot ma juŋ odpowiednie narzędzie, co naleŋy zrobiæ? Czy uŋytkownik robota (czģowiek) chciaģ wody z kranu, czy teŋ w lodówce jest woda butelkowana? Co powiesz na wodę sodową w puszkach? Moŋe uŋytkownik chce trochę wody mineralnej, której zabrakģo jej w zeszģym tygodniu, w takim przypadku robot albo musi wróciæ i poprosiæ o dalsze instrukcje, albo zgadywaæ, jaki substytut moŋe zaakceptowaæ uŋytkownik.
FRANKENSTEINA SCENARIUSZ
Science fiction peģne jest historii, w których niektóre postacie to roboty lub inteligentne komputery. Roboty science-fiction to często androidy. Takie maszyny są niezmiennie zaprojektowane z myķlą o pomaganiu ludzkoķci, chociaŋ często wydaje się, ŋe maszyny odgrywają role, w których niektórym ludziom "pomaga się" kosztem innych. Powtarzający się temat w science fiction wiąŋe się z konsekwencjami robotów lub inteligentnych maszyn, które zwracają się przeciwko swoim twórcom lub dochodzą do logicznych wniosków niemoŋliwych do zaakceptowania przez ludzkoķæ. Temat ten nazywa się scenariuszem Frankensteina, po sģynnym fikcyjnym Androidzie. Ŋywy przykģad scenariusza Frankensteina dostarcza powieķæ 2001: Kosmiczna Odyseja, w której Hal, sztucznie inteligentny komputer na statku kosmicznym, próbuje zabiæ astronautę. Hal jakoķ dziaģa nieprawidģowo, staje się paranoikiem i uwaŋa, ŋe Dave, astronauta, chce zniszczyæ komputer. Jak na ironię, paranoja Hala wywoģuje bardzo niefortunne obawy Hala, poniewaŋ Dave jest zmuszony wyģączyæ Hala, aby uratowaæ mu ŋycie. Maszyna moŋe logicznie zareagowaæ, aby zachowaæ swoje istnienie, gdy ludzie próbują "wyciągnąæ wtyczkę". Moŋe to przybraæ formę pozornie wrogiego zachowania, w którym kontrolery robotów wspólnie decydują, ŋe naleŋy wyeliminowaæ ludzi. Poniewaŋ roboty mają się zachowywaæ zgodnie z trzema prawami Asimova, instynkt przetrwania robotów moŋe byæ uŋyteczny, ale tylko do pewnego momentu. Robot nigdy nie moŋe skrzywdziæ czģowieka; to kolejne z praw Asimova. Innym przykģadem scenariusza Frankensteina jest zespóģ komputerów w Colossus: The Forbin Project. W takim przypadku maszyny mają na uwadze najlepszy interes ludzkoķci. Wojna, decydują komputery, nie moŋe byæ dozwolona. Ludzie, twierdzą komputery, wymagają struktury w swoim ŋyciu, a zatem ich zachowanie musi byæ ķciķle regulowane. Wynik to paņstwo totalitarne zarządzane przez maszynę.
FRONT LIGHTING [OĶWIETLENIE PRZEDNIE]
W robotycznym systemie wizyjnym termin oķwietlenie przednie odnosi się do oķwietlenia obiektów w ķrodowisku pracy za pomocą žródģa ķwiatģa umieszczonego w pobliŋu czujników obrazowania robota lub w jego pobliŋu. Ķwiatģo ze žródģa odbija się zatem od powierzchni obserwowanych obiektów przed dotarciem do czujników. Poniewaŋ poģoŋenie lampy znajduje się w pobliŋu czujników, robot widzi minimalny lub ŋaden efekt cienia w swoim ķrodowisku pracy. Oķwietlenie przednie stosuje się w sytuacjach, w których detale powierzchni, a zwģaszcza róŋnice w kolorze lub cieniowaniu obserwowanych obiektów, są interesujące lub istotne. Aby jednak pojawiģa się tekstura, najlepiej dziaģa oķwietlenie boczne. Oķwietlenie przednie nie dziaģa szczególnie dobrze w sytuacjach z póģprzezroczystymi lub póģprzezroczystymi obiektami, jeķli ich struktura wewnętrzna musi zostaæ przeanalizowana. W takich przypadkach najlepsze jest oķwietlenie tylne. .
FUNKCJA
Funkcja to mapowanie między zbiorem obiektów lub liczb. Funkcje są waŋne w matematyce, a takŋe w logice. Nie wszystkie elementy w zestawie po lewej stronie (niektóre z nich są oznaczone czarnymi kropkami) koniecznie mają odpowiedniki w zestawie po prawej stronie. Podobnie, nie wszystkie elementy w zestawie po prawej stronie (niektóre z nich są oznaczone biaģymi kropkami) koniecznie mają odpowiedniki w zestawie po lewej stronie. Jeķli mapowanie ma zostaæ zakwalifikowane jako funkcja, moŋliwe jest mapowanie więcej niŋ jednego elementu z zestawu po lewej stronie na pojedynczy element w zestawie po prawej stronie, ale ŋaden element w zestawie po lewej stronie nie moŋe mieæ więcej niŋ jeden partner w zestawie po prawej stronie. Funkcja nigdy nie mapuje pojedynczego elementu na więcej niŋ jeden odpowiednik.
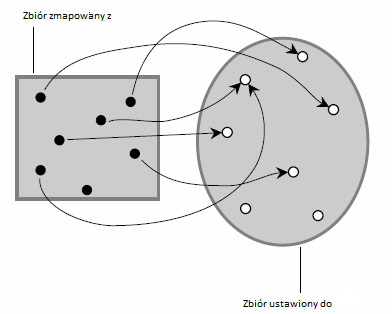
Jak pokazano na ilustracji, zestaw wszystkich elementów po lewej stronie, które mają wiązania po prawej stronie, nazywany jest domeną funkcji. Zakres funkcji to zestaw wszystkich elementów po prawej stronie z odpowiednimi elementami w zestawie po lewej stronie. W logice funkcja, a dokģadniej nazywana funkcją logiczną, jest operacją, która pobiera jedną lub więcej zmiennych wejķciowych, takich jak X, Y i Z, i generuje okreķlone dane wyjķciowe dla kaŋdej kombinacji danych wejķciowych. Funkcje logiczne są na ogóģ prostsze niŋ matematyczne, poniewaŋ zmienne wejķciowe mogą mieæ tylko dwie wartoķci: 0 (faģsz) lub 1 (prawda). Przykģad funkcji logicznej w trzech zmiennych pokazano w tabeli. Najpierw operacja logiczna AND wykonywana jest na X i Y. Następnie operacja logiczna OR wykonywana jest między (X AND Y) a zmienną Z. Niektóre funkcje logiczne mają dziesiątki zmiennych wejķciowych; istnieje jednak tylko jedna wartoķæ wyjķciowa dla kaŋdej kombinacji danych wejķciowych.
X: Y: Z: f (X, Y, Z)
0: 0: 0: 0
0: 0: 1: 1
0: 1: 0: 0
0: 1: 1: 1
1: 0: 0: 0
1: 0: 1: 1
1: 1: 0: 1
1: 1: 1: 1
Funkcje logiczne są waŋne dla inŋynierów przy projektowaniu ukģadów cyfrowych, w tym komputerów. Często istnieje kilka róŋnych moŋliwych kombinacji bramek logicznych, które wygenerują daną funkcję logiczną. Zadaniem inŋyniera jest znalezienie najprostszego i najbardziej wydajnego projektu. Termin funkcja, a ķciķlej funkcja zamierzona, jest często uŋywany w odniesieniu do zestawu zadaņ lub procedur, które urządzenie lub kontroler ma za zadanie wykonaæ lub wykonaæ. Ta definicja jest caģkowicie niezaleŋna od definicji matematycznych i logicznych. Równanie matematyczne lub zestaw równaņ, które reprezentują ksztaģt fali sygnaģu, jest czasem nazywane funkcją. Generator funkcji to wyspecjalizowany obwód, który generuje przebiegi, których krzywe są wykresami okreķlonych funkcji matematycznych
FUTURYSTA
Futurysta to osoba, która na podstawie obecnych technologii i trendów próbuje przewidzieæ, co zostanie osiągnięte w danej dziedzinie naukowej za 5, 10, 50, 100 lub więcej lat. W robotyce i sztucznej inteligencji (AI) jest mnóstwo pracy dla futurystów. Większoķæ futurystów zgadza się, ŋe roboty z czasem staną się bardziej wyrafinowane i bardziej powszechne. Jest pewne pytanie, co dokģadnie , w jakiej formie przybędą roboty. Choæ marzenie o androidach jest fajne, często nie są to najbardziej praktyczne i funkcjonalne roboty. Teoretycznie AI ma teoretycznie nieograniczony potencjaģ. W praktyce jednak sprawy potoczyģy się wolniej niŋ futuryķci XX wieku miaģ nadzieję Procesy uzasadnienia są niezwykle zģoŋone. Niektórzy futuryķci uwaŋają, ŋe wszystkie ludzkie procesy myķlowe moŋna rozbiæ na interakcje między cząsteczkami materii. Jeķli to prawda, to technicznie moŋliwe (choæ trudne) jest zbudowanie komputera tak inteligentnego lub inteligentnego jak czģowiek. Inni naukowcy są przekonani, ŋe myķl ludzka wiąŋe się
z czynnikami, których nie moŋna zdefiniowaæ ani odtworzyæ w materiale czysto materialnym warunki. W takim przypadku zbudowanie komputera z nadludzką inteligencją moŋe byæ niemoŋliwe. Autorzy science-fiction historycznie opowiadali historie o maszynach i scenariuszach, z których wiele póžniej staģo się rzeczywistoķcią w większym lub mniejszym stopniu. Z tego powodu pisarze science fiction nazywani są futurystami
Robot gantry skģada się z ramienia robota i efektora koņcowego, który wykorzystuje trójwymiarową (3-D) geometrię wspóģrzędnych kartezjaņskich do precyzyjnego pozycjonowania. W jednej wersji systemu gantry ruch w osi Z (góra / dóģ) zapewnia pionowy waģ, po którym zespóģ moŋe się ķlizgaæ. Zespóģ ten skģada się z poziomego waģu, wzdģuŋ którego poziome ramię pod kątem prostym do waģu moŋe ķlizgaæ się na osi y (do przodu / do tyģu). Napęd kablowy uģatwia wysuwanie i chowanie ramienia poziomego dla ruchu osi x (lewy / prawy) efektora koņcowego. Roboty takie są uŋywane w robotyce przemysģowej do ustawiania efektorów koņcowych nad okreķlonymi punktami na poziomej powierzchni pģaskiej. Efektor koņcowy moŋe byæ chwytakiem, który podnosi lub zwalnia przedmioty, jak w przypadku dostarczania kropli. Alternatywnie moŋna zastosowaæ efektor koņcowy waģu obrotowego, jak w robocie zaprojektowanym do dokręcania ķrub.
GAS STATION ROBOT [ROBOT STACJI BEZNYNOWEJ]
Pomimo wzrostu popularnoķci samoobsģugowych stacji benzynowych, nadal istnieją ludzie, którzy wolą siedzieæ w samochodach i zleciæ komuķ - lub czemuķ - brudną robotę. Roboty są w stanie napeģniæ zbiornik paliwa i umyæ przednią szybę. Rysunek pokazuje, jak moŋe wyglądaæ typowy zrobotyzowany przejazd przez stację paliw lub robot stacji benzynowej. Osoba podjeŋdŋa samochodem do stacji pģatniczej i wkģada kartę kredytową. Ta karta zawiera informacje dotyczące marki i roku samochodu, a takŋe dane konta kredytowego. To informuje robota, gdzie moŋe znaležæ otwór do napeģniania zbiornika gazu (prawa lub lewa strona samochodu) i czy na koncie kredytowym jest wystarczająca iloķæ ķrodków, aby zapģaciæ za peģny zbiornik paliwa. Inną metodą identyfikacji samochodu moŋe byæ zastosowanie kodu kreskowego lub pasywnego transpondera, podobnego do metek z cenami towarów konsumpcyjnych. Robot musi znaæ pozycję samochodu z dokģadnoķcią do milimetra. W przeciwnym razie dysza moŋe nie trafiæ w rurkę napeģniającą i rozlaæ benzynę na chodnik lub, co gorsza, umieķciæ go w samochodzie przez okno. Rozpoznanie obiektu pomaga zapobiec problemom takim jak to. Alternatywnie moŋna zastosowaæ wyszukiwanie stronnicze, pozwalające dyszy na wyszukiwanie otworu do napeģniania zbiornika gazu. Sam otwór ma taką konstrukcję, ŋe robot moŋe go otworzyæ i wģoŋyæ dyszę bez pomocy czģowieka prowadzącego samochód. Zrobotyzowane stacje benzynowe, jeķli staną się normą, pozwolą ludziom pozostaæ w samochodach bez brudzenia się, zimna, wilgoci lub gorąca. Obsģuga dobrze zaprojektowanej, zrobotyzowanej stacji benzynowej powinna byæ szybka i wydajna. Roboty będą musiaģy zostaæ zaprogramowane tak, aby nie "uzupeģniaģy" zbiornika gazu, aby uzyskaæ okrągģą liczbę za tę cenę. (Moŋe to spowodowaæ przepeģnienie zbiornika i zajmuje niepotrzebny czas.) Robot nie zapomni wymieniæ korka gazu, a odwieczny problem dla niektórych osób korzystających z "samoobsģugowych" stacji benzynowych.
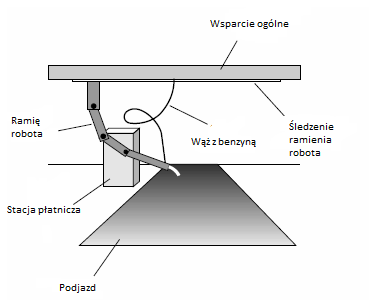
GATEWAY
Brama jest punktem decyzyjnym w wyspecjalizowanym procesie nawigacji robotycznej znanym jako planowanie ķcieŋki topologicznej. Gdy robot napotyka bramę, naleŋy podjąæ decyzję, która wpģynie na przyszģą ķcieŋkę maszyny. Przykģadem bramy jest skrzyŋowanie dwóch ulic. Na typowym skrzyŋowaniu, gdzie dwie proste drogi przecinają się pod kątem prostym, zrobotyzowany pojazd moŋe wykonaæ jedną z czterech czynnoķci:
• Kontynuuj prosto
• Skręæ w lewo
• Skręæ w prawo
• Cofnij
Gdy robot mobilny jest zaprogramowany na podróŋowanie z jednego punktu do drugiego, z bramami często trzeba się uporaæ. Jeķli urządzenie ma kompletną mapę komputerowa ķrodowiska pracy, a jeķli ķrodowisko nie jest zbyt skomplikowane, kaŋda moŋliwoķæ bramy moŋe znajdowaæ się w pamięci kontrolera lub na noķniku pamięci. Jeķli ķrodowisko pracy jest zģoŋone lub zmienia się z czasem, decyzje muszą opieraæ się na programowaniu, a nie na przechowywaniu danych metodą "brute force".
GENERATOR
Pojęcie generator moŋe odnosiæ się do jednego z dwóch urządzeņ. Generator sygnaģu jest žródģem prądu, napięcia lub mocy prądu przemiennego (AC) w obwodzie elektronicznym. Oscylator jest częstym przykģadem. Generator elektryczny to urządzenie wytwarzające prąd przemienny z energii mechanicznej.
Generator sygnaģu
Generator sygnaģu sģuŋy do testowania komunikacji, wykrywania, monitorowania, bezpieczeņstwa, nawigacji, rozrywki i sprzętu audio-częstotliwoķci (AF) lub częstotliwoķci radiowej (RF). Obejmuje to róŋne typy robotycznych systemów wykrywania. W najprostszej postaci generator sygnaģu skģada się z prostego elektronicznego oscylatora, który wytwarza falę sinusoidalną o pewnej amplitudzie w mikrowoltach (μV) lub miliwoltach (mV) i pewnej częstotliwoķci w hercach (Hz), kilohercach (kHz), megaherc (MHz) lub gigaherc (GHz). Niektóre generatory sygnaģów AF mogą wytwarzaæ róŋne typy przebiegów
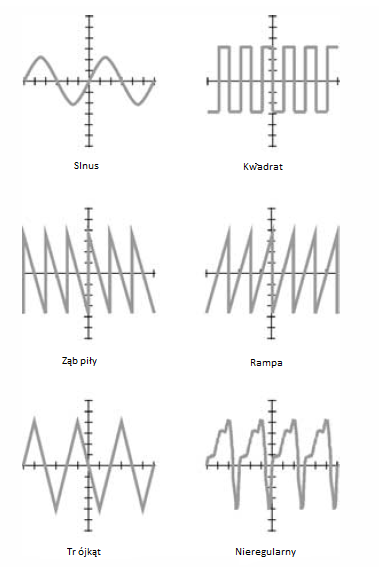
Bardziej zaawansowane generatory sygnaģów do testowania RF mają modulatory amplitudy i / lub modulatory częstotliwoķci. Generator funkcyjny to generator sygnaģu, który moŋe wytwarzaæ wyspecjalizowane przebiegi wybrane przez uŋytkownika. Wszystkie przebiegi elektryczne moŋna wyraziæ jako matematyczne funkcje czasu. Na przykģad chwilowa amplituda fali sinusoidalnej moŋe byæ wyraŋona w postaci f (t) = sin bt, gdzie a jest staģą, która okreķla amplitudę szczytową, a b jest staģą, która okreķla częstotliwoķæ. Fale kwadratowe, fale piģoksztaģtne i wszystkie inne okresowe zaburzenia mogą byæ wyraŋone jako matematyczne funkcje czasu, chociaŋ funkcje te są w niektórych przypadkach skomplikowane. Większoķæ generatorów funkcyjnych moŋe wytwarzaæ fale sinusoidalne, piģy zębate i fale prostokątne. Niektóre mogą równieŋ generowaæ sekwencje impulsów. Bardziej zaawansowane generatory funkcji, które mogą tworzyæ wiele róŋnych ksztaģtów fali, są wykorzystywane do celów testowych w projektowaniu, rozwiązywaniu problemów i ustawianiu aparatury elektronicznej
Generator elektryczny
Generator elektryczny jest skonstruowany podobnie do konwencjonalnego silnika elektrycznego, chociaŋ dziaģa w przeciwnym kierunku. Niektóre generatory mogą równieŋ dziaģaæ jako silniki; nazywane są silnikami / generatorami. Generatory, podobnie jak silniki, są przetwornikami energii specjalnego rodzaju. Typowy generator wytwarza prąd przemienny, gdy cewka jest szybko obracana w silnym polu magnetycznym. Pole magnetyczne moŋe byæ zapewnione przez parę magnesów trwaģych (ryc. 2). Waģ obrotowy napędzany jest silnikiem benzynowym, turbiną lub innym žródģem energii mechanicznej. Komutator moŋe byæ uŋywany z generatorem do generowania pulsującego prądu staģego (DC), który moŋe byæ filtrowany w celu uzyskania czystego prądu staģego do uŋycia z precyzyjnym sprzętem.
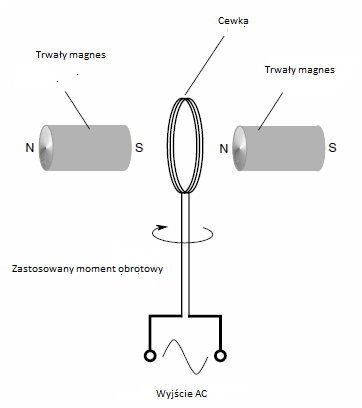
GLOBALNY SYSTEM POZYCJONOWANIA (GPS)
Global Positioning System (GPS) to sieæ bezprzewodowych urządzeņ lokalizacyjnych i nawigacyjnych, które dziaģają na caģym ķwiecie. G PS wykorzystuje kilka satelitów i pozwala na okreķlenie szerokoķci, dģugoķci i wysokoķci. Jest stosowany w niektórych mobilnych systemach robotycznych do prowadzenia, gdy ekstremalna, zlokalizowana precyzja nie jest konieczna. Wszystkie satelity GPS przesyģają sygnaģy w widmie radiowym o ultrawysokiej częstotliwoķci (UHF). Sygnaģy są modulowane za pomocą kodów zawierających taktowanie informacji wykorzystywane przez aparat odbiorczy do wykonywania pomiarów. Odbiornik GPS okreķla swoją lokalizację, mierząc odlegģoķci do cztery lub więcej róŋnych satelitów i wykorzystanie komputera do przetwarzania informacji otrzymanych z satelitów. Na podstawie tych informacji odbiornik moŋe daæ uŋytkownikowi wskazanie pozycji z dokģadnoķcią do kilku metrów.
GRACEFUL DEGRADATION [ĢAGODNA DEGRADACJA]
Gdy częķæ systemu komputerowego dziaģa nieprawidģowo, poŋądane jest, aby komputer nadal dziaģaģ, nawet jeķli wydajnoķæ spadnie. Jeķli pojedynczy komponent powoduje awarię caģego komputera, nazywa się to katastrofalną awarią. Zasadniczo moŋna temu zapobiec dzięki dobrej inŋynierii, w tym zastosowaniu systemów tworzenia kopii zapasowych. W ģagodnej degradacji wraz ze wzrostem liczby awarii komponentów wydajnoķæ i / lub prędkoķæ systemu stopniowo spada, ale nie spada natychmiast do zera. Ilustracja jest wykresem zachowania hipotetycznego systemu robotycznego z pģynną degradacją. W przypadku awarii podsystemu zaawansowany komputer lub sterownik robota moŋe wykorzystaæ inne obwody do wykonania zadaņ miejsca awarii tymczasowo częķæ systemu. Operator lub osoba obsģugująca jest powiadamiana, ŋe coķ jest nie tak, a technicy mogą to naprawiæ, często z niewielkim przestojem lub bez przestoju.
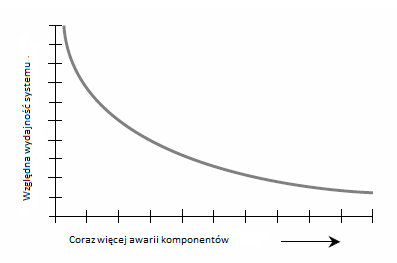
GRAFICZNE PLANOWANIE ĶCIEŊKI
Graficzne planowanie ķcieŋki jest metodą nawigacji stosowaną przez roboty mobilne. Jest to specjalistyczny schemat lub zestaw schematów do wykonywania planowania ķcieŋki metrycznej. W graficznym planowaniu ķcieŋek wszystkie moŋliwe trasy są wykreķlane na komputerowej mapie ķrodowiska pracy. Trasy te moŋna wybieraæ na róŋne sposoby, stosując okreķlone algorytmy. W otwartym ķrodowisku pracy (czyli takim, w którym nie ma ŋadnych zagroŋeņ ani przeszkód), najlepsze trasy to zwykle proste linie między węzģami lub punkty zatrzymania . Algorytm okreķlania tych ķcieŋek jest stosunkowo prosty; moŋe byæ reprezentowany przez zestaw równaņ liniowych w sterowniku robota. Przeszkoda, bariera lub zagroŋenie mogą skomplikowaæ ten scenariusz, ale tylko wtedy, gdy przecina lub prawie przecina jedną z linii wyznaczonych przez równania liniowe. Aby uniknąæ wpadek, algorytm moŋna zmodyfikowaæ, aby zawieraģ stwierdzenie, ŋe maszyna nigdy nie moŋe zbliŋaæ się do przeszkody, bariery lub niebezpieczeņstwa w pewnej odlegģoķci. W celu wykrycia takich sytuacji moŋna zastosowaæ czujniki zbliŋeniowe. W ķrodowisku pracy, w którym występują liczne przeszkody lub zagroŋenia, lub gdy istnieją bariery, takie jak ķciany oddzielające pokoje i korytarze, algorytm linii prostej nie jest zadowalający, nawet w zmienionej formie, poniewaŋ konieczne jest zbyt wiele modyfikacji. Jednym ze schematów, który dziaģa caģkiem dobrze w tego rodzaju ķrodowisku, jest wykres Voronoi. Ķcieŋki są zdefiniowane jako zestawy punktów w jak największej odlegģoķci od przeszkód, barier lub zagroŋeņ. Na przykģad w korytarzu ķcieŋka prowadzi w dóģ do ķrodka. To samo dotyczy robota przechodzącego przez drzwi. Ķcieŋki w innych miejscach zaleŋą od lokalizacji węzģów i rozmieszczenia przeszkód w pokojach lub otwartych przestrzeniach
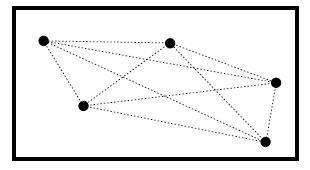
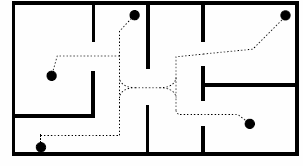
GRASPING PLANNING [PLANOWANIE CHWYTU
Planowanie chwytania odnosi się do schematu uŋywanego przez ramię robota i chwytak do chwytania wybranego obiektu. Zaģóŋmy, ŋe ktoķ mówi robotowi, aby poszedģ do kuchni i wziąģ ģyŋkę. Robot wykorzystuje ogólne planowanie ruchu , aby znaležæ kuchnię, oraz planowanie ruchu w celu zlokalizowania wģaķciwej szuflady i ustalenia, które przedmioty w szufladzie są ģyŋkami. Następnie chwytak musi chwyciæ ģyŋkę, najlepiej za uchwyt, a nie za koniec do jedzenia. Robot nie moŋe dostaæ widelca, dwóch ģyŋek ani ģyŋki wraz z czymķ innym, takim jak otwieracz do puszek. Mamy nadzieję, ŋe sztuæce są uģoŋone logicznie w szufladzie, więc ģyŋki nie są losowo mieszane z widelcami, noŋami, otwieraczami do puszek i innymi przyborami. Moŋna to zapewniæ przez programowanie, o ile robot (ale tylko robot) ma dostęp do szuflady. Jeķli w domu są dzieci i jeķli dostaną się do szuflady ze srebrnymi naczyniami, robot lepiej poradzi sobie z pomieszanymi naczyniami. Następnie zdobycie ģyŋki staje się rodzajem problemu z pobieraniem pojemników. Zbliŋenie, szczegóģowe widzenie maszynowe, takie jak system oko w rękę, moŋe zapewniæ, ŋe chwytak dostanie wģaķciwe naczynie we wģaķciwy sposób. Moŋna równieŋ zastosowaæ wyczuwanie dotykowe, poniewaŋ ģyŋka "czuje się" inaczej niŋ jakikolwiek inny przyrząd.
GRAWITACYJNE ĢADOWANIE
Ģadowanie grawitacyjne jest zjawiskiem, które wprowadza bģąd pozycjonowania ramiona robota pod wpģywem siģy grawitacji. Wszystkie ramiona robota skģadają się z materiaģów, które do pewnego stopnia wyginają się lub rozciągają; ŋadna znana substancja nie jest idealnie sztywna. Ponadto wszystkie materiaģy mają pewną masę; dlatego w polu grawitacyjnym mają równieŋ wagę. Cięŋar ramienia robota i efektora koņcowego zawsze powoduje pewne zginanie i / lub rozciąganie materiaģów, z których wykonany jest zespóģ. Efekt moŋe byæ wyjątkowo maģy, jak w teleskopie, zorientowane pionowo ramię robota; lub moŋe byæ większy, jak w dģugim, przegubowym ramieniu robota. Jednak efekt nigdy nie jest caģkowicie nieobecny. Bģąd spowodowany obciąŋeniem grawitacyjnym nie zawsze jest znaczący. W sytuacjach, w których obciąŋenie grawitacyjne powoduje znaczne bģędy pozycjonowania, konieczny jest schemat korekty.
GRAYSCALE
Skala szaroķci to metoda tworzenia i wyķwietlania cyfrowych obrazów wideo. Jak sama nazwa wskazuje, system wizyjny w skali szaroķci jest ķlepy na kolory. Kaŋde zdjęcie skģada się z pikseli. Jeden piksel jest elementem pojedynczego obrazu (pix). Piksele to maģe kwadraty, kaŋdy z odcieniem szaroķci, któremu przypisano kod cyfrowy. Istnieją trzy powszechnie stosowane schematy renderowania pikseli w skali szaroķci: procent czerni, 16 odcieni szaroķci i 256 odcieni szaroķci. W schemacie procentowym jest zwykle 11 poziomów zgodnie z następującą sekwencją: {czarny, 90 procent czarnych, 80 procent czarnych,
, 20 procent czarnych, 10 procent czarnych, biaģych}. Czasami jasnoķæ jest dalej dzielona, w krokach co 5 procent lub nawet 1 procent zamiast 10 procent; takie gradacje bywają nieprecyzyjne, poniewaŋ cyfrowe kody komputerowe są binarne (potęga-2), a nie dziesiętne (potęga-10). W schemacie 16 odcieni cztery cyfry binarne lub bity są potrzebne do przedstawienia kaŋdego poziomu jasnoķci od czerni = 0000 do bieli = 1111. W schemacie 256 odcieni uŋywa się oķmiu cyfr binarnych, od czerni = 00000000 do bieli = 11111111.
GROSS MOTION PLANNING [PLANOWANIE RUCHU OGÓLNEGO]
Planowanie ruchów ogólnych to schemat, w którym robot mobilny stosuje się do nawigacji w swoim ķrodowisku pracy bez wpadania na rzeczy, spadania ze schodów lub przewracania się. Termin ten moŋe równieŋ odnosiæ się do ogólnej, zaprogramowanej sekwencji ruchów, które wykonuje ramię robota w przemysģowym systemie robotycznym. Planowanie ruchu brutto moŋna wykonaæ za pomocą komputerowej mapy ķrodowiska. To mówi, gdzie znajdują się stoģy, krzesģa, meble i inne przeszkody oraz w jaki sposób są one ustawione. Inną metodą jest uŋycie czujnika zbliŋeniowego lub systemu wizyjnego. Urządzenia te mogą pracowaæ w ķrodowiskach nieznanych robotowi, dla których nie ma mapy komputera. Jeszcze inną metodą jest uŋycie sygnaģów nawigacyjnych. Zaģóŋmy, ŋe osobistemu robotowi powiedziano, aby poszedģ do kuchni i wziąģ jabģko z kosza na stole. Robot moŋe zastosowaæ ogólne planowanie ruchu, aby zeskanowaæ swoją mapę komputerową i zlokalizowaæ kuchnię. W kuchni potrzebny jest sposób, aby ustaliæ, gdzie znajduje się stóģ. Odnalezienie kosza i wybranie z niego jabģka (szczególnie jeķli w koszyku są teŋ inne rodzaje owoców), wymaga dokģadnego planowania ruchu.
GROUNDSKEEPING ROBOT [ROBOT - OGRODNIK]
Istnieje wiele miejsc pracy dla robotów osobistych na podwórku w domu, a takŋe w domu. Dwa oczywiste zastosowania robota do utrzymywania zieleni obejmują koszenie trawnika i usuwanie ķniegu. Ponadto taka maszyna moŋe podlewaæ i odchwaszczaæ ogród. Jazda kosiarkami i odķnieŋarkami jest ģatwa w uŋyciu dla wyrafinowanych robotów mobilnych. Robot nie musi byæ dwunoŋny; musi tylko mieæ formę odpowiedni do jazdy na maszynie i obsģugi elementów sterujących. Alternatywnie kosiarki do trawy lub odķnieŋarki mogą byæ urządzeniami zrobotyzowanymi, zaprojektowanymi z myķlą o jednym zadaniu. Gģównym wyzwaniem po rozpoczęciu pracy robota koszącego lub odķnieŋającego jest wykonywanie pracy wszędzie tam, gdzie powinno, ale nigdzie indziej. Wģaķciciel robota nie chce kosiarki do ogrodu i nie ma sensu dmuchaæ ķniegu z trawnika (zwykle). Taki robot powinien zatem byæ zautomatyzowanym pojazdem kierowanym (AGV). Przewody prądowe moŋna zakopaæ na obwodzie podwórza, wzdģuŋ krawędzi podjazdu i chodników, ustanawiając granice, w których robot musi pracowaæ. W obszarze roboczym wykrywanie krawędzi moŋe byæ uŋywane do podąŋania za linią między skoszoną trawą a niewykoszoną trawą lub między oczyszczoną i nieutwardzoną nawierzchnią. Ta linia jest ģatwo dostrzegalna ze względu na róŋnice w jasnoķci i / lub kolorze. Alternatywnie moŋna zastosowaæ mapę komputerową, a robot moŋe matkowaæ z kontrolowanymi i zaprogramowanymi paskami z matematyczną precyzją. Istnieje juŋ sprzęt umoŋliwiający robotom utrzymującym kontrolę nad ziemią wytrzymanie wszystkich temperatur często spotykanych zarówno latem, jak i zimą, od Alaski po dolinę ķmierci. Oprogramowanie jest bardziej niŋ wystarczająco zaawansowane, by wykonywaæ zwykģe prace konserwacyjne i odķnieŋające. Jedynym wyzwaniem, jakie pozostaģo, jest obniŋenie kosztów do poziomu, w którym przeciętnego konsumenta staæ na robota.
GUIDANCE SYSTEM [SYSTEM PROWADZENIA]
W robotyce system prowadzenia odnosi się do sprzętu i oprogramowania, które pozwalają robotowi odnaležæ drogę w swoim ķrodowisku pracy. W szczególnoķci dotyczy to ruchu ogólnego.
GYROSCOPE [ŊYROSKOP]
Ŋyroskop lub ŋyro to urządzenie przydatne w nawigacji robotów. Stanowi serce bezwģadnoķciowego systemu prowadzenia, dziaģającego w oparciu o fakt, ŋe obracający się, cięŋki dysk ma tendencję do utrzymywania swojej orientacji w przestrzeni. Ilustracja pokazuje budowę prostego ŋyroskopu. Tarcza wykonana z masywnego materiaģu, takiego jak lita stal lub wolfram, jest zamontowana w przegubie kulistym, który jest zestawem ģoŋysk, które umoŋliwiają obracanie tarczy w górę i w dóģ lub z boku na bok; przeciwnie, ģoŋyska umoŋliwiają przechodzenie caģego zespoģu (z wyjątkiem tarczy) pod kątem, przechyģu i odchylenia, podczas gdy tarcza pozostaje nieruchoma w orientacji przestrzennej. Tarcza jest zwykle napędzana silnikiem elektrycznym. Ŋyroskop moŋna wykorzystaæ do ķledzenia kierunku ruchu robota lub jego poģoŋenia w trójwymiarowej (3-D) przestrzeni bez polegania na obiektach zewnętrznych, sygnaģach nawigacyjnych lub polach siģowych. Ŋyroskopy umoŋliwiają dokģadne dziaģanie systemów naprowadzania przez ograniczony czas
, poniewaŋ mają tendencję do zmiany orientacji powoli przez dģugi czas. Ponadto ŋyroskopy są podatne na niewspóģosiowoķæ w przypadku szoku fizycznego
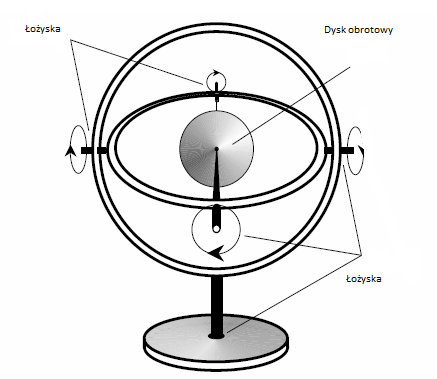
Jeden z najwczeķniejszych eksperymentów ze sztuczną inteligencją (AI) przeprowadzono z wyimaginowanym robotem, caģkowicie zawartym w "umyķle" komputera. Uczeņ Gerry Sussman napisaģ program o nazwie "Hacker" w języku komputerowym znanym jako LISP. W rezultacie powstaģ maģy wszechķwiat, w którym robot mógģ ukģadaæ na sobie bloki. Sussman stworzyģ prawa fizyki w wyimaginowanym wszechķwiecie. Poķród nich byģy to takie rzeczy jak
• Bloki X, Y i Z waŋą po 5 funtów.
• Bloki V i W waŋą po 50 funtów.
• Robot moŋe podnieķæ nie więcej niŋ 10 funtów.
• Tylko jeden obiekt moŋe zajmowaæ dane miejsce w danym czasie.
• Robot wie, ile jest bloków.
• Robot moŋe znaležæ bloki, jeķli nie są bezpoķrednio widoczne.
Ilustracja 1 pokazuje pięæ leŋących wokóģ bloków, które mogą pojawiæ się na monitorze komputera wraz z robotem. Sussman wydaģ robotowi polecenia, takie jak: "Ukģadaj klocki jeden na drugim, jeden na drugim". Jak wspomniano, polecenie to jest niemoŋliwe, poniewaŋ wymaga od robota podniesienia bloku o wadze 50 funtów (V lub W ), a robot moŋe unieķæ tylko 10 funtów (patrz rysunek 2). Co by się staģo? Czy robot będzie próbowaģ wiecznie podnieķæ blok ponad granicę wytrzymaģoķci? A moŋe powie Sussmanowi coķ w rodzaju "Nie moŋna tego zrobiæ"? Czy pójdzie najpierw za blokiem V lub W, próbując dostaæ się na jeden z jaķniejszych bloków, czy na drugi cięŋki blok? Czy podniósģby wszystkie lŋejsze bloki X, Y i Z w jakiejķ sekwencji, ukģadając je pionowo na V lub W? Czy umieķciģby dwa lekkie bloki na V, a pozostaģy jasny blok na W, a następnie się poddaģ? W koņcu robot wpadģby w niemoŋnoķæ wykonania polecenia. Ale jak dģugo spróbuje i co spróbuje, zanim odejdzie?
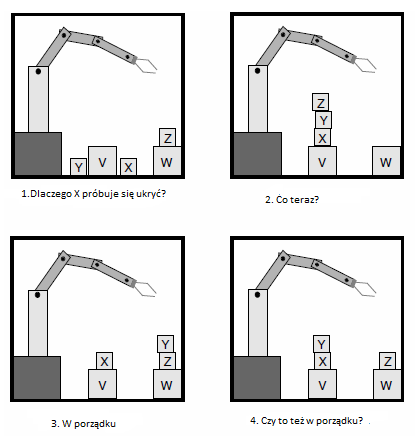
Innym poleceniem moŋe byæ: "Ukģadaj klocki tak, aby byģy lŋejsze na cięŋszych. " Moŋna to zrobiæ zgodnie z powyŋszymi zasadami. Istnieje jednak kilka róŋnych moŋliwych sposobów (dwa z nich pokazano na ilustracjach 3 i 4). Czy robot zawahaģby się, nie podejmując decyzji? A moŋe wykona to zadanie w jakiķ sposób? Gdyby powtórzyæ eksperyment, czy wynik byģby zawsze taki sam, czy teŋ za kaŋdym razem robot rozwiązaģby problem w inny sposób? Wielu badaczy AI napisaģo programy podobne do "Hackera", tworząc "wszechķwiaty komputerowe", aby zmusiæ maszyny do myķlenia i uczenia się. Wyniki często byģy fascynujące i nieoczekiwane.
HALUCYNACJA
U czģowieka halucynacja ma miejsce, gdy zmysģy dostarczają fantomowe wiadomoķci. Moŋe się to zdarzyæ w przypadku chorób psychicznych lub pod wpģywem niektórych leków. Halucynacje mogą byæ i często są ģączone z urojeniami lub bģędnymi interpretacjami rzeczywistoķci. Przykģadem jest osoba, która uwaŋa, ŋe szpiedzy ją ķcigają, i która widzi zģowrogie postacie czające się za drzewami lub w ciemnych zauģkach. Zaawansowane komputery mogą wydawaæ się mieæ halucynacje i zģudzenia. Prawdopodobieņstwo takich awarii, które mają miejsce w dziwny i często niewytģumaczalny sposób, wzrasta, gdy systemy stają się bardziej zģoŋone. Wynika to z faktu, ŋe w miarę jak komputery stają się mądrzejsze, liczba komponentów, ķcieŋek i węzģów roķnie w proporcji wykģadniczej, a zatem prawdopodobieņstwo awarii komponentu lub sygnaģu bģądzącego "roķnie". Komponenty komputerowe są na ogóģ wyjątkowo niezawodne; jednakŋe, biorąc pod uwagę ich wystarczająco duŋą liczbę, mogą się zdarzyæ dziwne rzeczy i tak się staģo. Doķwiadczeni uŋytkownicy komputerów osobistych i technicy wiedzą o tym. Niektórzy badacze sztucznej inteligencji (AI) uwaŋają, ŋe halucynacje elektroniczne lub urojenia mogą kiedyķ wynikaæ z niewģaķciwego projektowania i pielęgnacji maszyn. Ci badacze podejrzewają, ŋe maszyny, w miarę ewolucji i stają się bardziej inteligentne, mogą rozwijaæ się "zawieszanie się", tak jak robią to ludzie. W chwili obecnej zģoķliwi ludzcy operatorzy powodują bezpoķrednio więcej problemów za pomocą takich programów, jak hakowanie i pisanie wirusów komputerowych, niŋ "komputery oszalaģy". Jednak w ciągu kilku dziesięcioleci autonomiczne roboty mogą staæ się w stanie programowaæ i utrzymywaæ się w duŋym stopniu, a sytuacja moŋe się zmieniæ.
HANDSHAKING [Uķcisk dģoni]
W cyfrowym systemie ģącznoķci dokģadnoķæ moŋna zoptymalizowaæ, sprawdzając, czy odbiornik poprawnie odebraģ dane. Odbywa się to okresowo - powiedzmy co trzy znaki - za pomocą procesu zwanego handshaking. Proces przebiega następująco, jak pokazano na rysunku. Najpierw nadajnik wysyģa trzy znaki danych. Następnie zatrzymuje się i oczekuje na sygnaģ z odbiornika, który mówi jedno z poniŋszych:
• (a) Wszystkie trzy znaki mają znane formaty.
• (b) Jeden lub więcej znaków ma nieznany format.
Jeķli sygnaģem zwrotnym jest (a), nadajnik wysyģa kolejne trzy znaki. Jeķli sygnaģem zwrotnym jest (b), nadajnik powtarza trzy znaki. W systemach komputerowych termin uzgadnianie odnosi się do metody kontrolowania lub synchronizacji przepģywu danych szeregowych między urządzeniami lub między nimi. Synchronizacja odbywa się za pomocą przewodu sterującego w sprzęcie lub kodu sterującego w programowaniu. Sprzętowe uzgadnianie jest stosowane, gdy moŋliwe są bezpoķrednie poģączenia drutowe lub kablowe, na przykģad między komputerem osobistym a drukarką szeregową. Uzgadnianie oprogramowania jest podobne do procesu stosowanego w systemach komunikacyjnych.
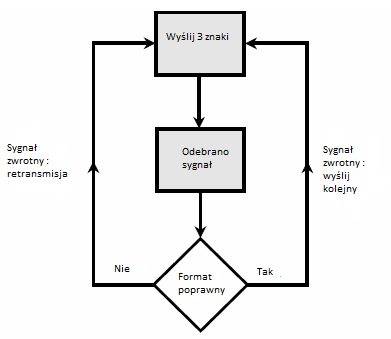
HARD WIRING [TWARDE OKABLOWANIE]
W komputerze lub autonomicznym robocie pojęcie twardego okablowania odnosi się do funkcji wbudowanych bezpoķrednio w sprzęt maszyny. Nie moŋna zmieniæ okablowania twardego bez zmiany ukģadu elementów fizycznych lub zmiany przewodów ģączących. Czasami oprogramowanie do wyraŋania jest uŋywane do oznaczania twardego okablowania, chociaŋ technicznie jest to niewģaķciwe uŋycie tego terminu. Idealny komputer (tj. komputer o nieskoņczonej mocy obliczeniowej i zerowym poziomie bģędu, który moŋe istnieæ tylko teoretycznie) mógģby zostaæ zaprogramowany do robienia czegokolwiek bez koniecznoķci przenoszenia pojedynczego elementu fizycznego. Oczywiķcie elementy muszą byæ jakoķ ze sobą poģączone, ale w idealnym przypadku funkcje moŋna zmieniæ po prostu przez przeprogramowanie maszyny. Zostaģo to w duŋej mierze zrealizowane w ostatnich latach dzięki zastosowaniu szybkich noķników danych o duŋej pojemnoķci. Okablowanie twarde ma pewne zalety w stosunku do sterowania programowego. Najwaŋniejszy jest fakt, ŋe funkcje przewodowe moŋna wykonywaæ z większą prędkoķcią niŋ procesy wymagające dostępu do mechanicznych noķników danych. Poniewaŋ jednak nieulotne noķniki danych bez ruchomych częķci stają się coraz bardziej dostępne, ta zaleta twardego okablowania będzie stopniowo zanikaæ.
HERTZ
Hertz, w skrócie Hz, jest podstawową miarą częstotliwoķci prądu przemiennego (AC). Częstotliwoķæ 1 Hz odpowiada jednemu cyklowi na sekundę. W rzeczywistoķci sģowo "herc" jest wymienne z wyraŋeniem "cykli na sekundę". Częstotliwoķæ jest często wyraŋana w jednostkach kiloherców (kHz), megaherców (MHz) i gigaherców (GHz). Częstotliwoķæ 1 kHz jest równa 1000 Hz; częstotliwoķæ 1 MHz jest równa 1000 kHz lub 106 Hz; częstotliwoķæ 1 GHz jest równa 1000 MHz lub 109 Hz. Szybkoķæ dziaģania komputerów cyfrowych jest często okreķlana pod względem częstotliwoķci. Im wyŋsza częstotliwoķæ, tym szybciej mikroprocesor moŋe dziaģaæ, a mocniejszy moŋe byæ komputer, który korzysta z ukģadu - jeķli wszystkie pozostaģe czynniki pozostaną niezmienione. Powodem, dla którego wyŋsza częstotliwoķæ przekģada się na mocniejszy ukģad, jest to, ŋe wraz ze wzrostem częstotliwoķci moŋna wykonywaæ coraz więcej instrukcji, a tym samym wykonywaæ więcej operacji, na jednostkę czasu. Częstotliwoķæ taktowania mikroprocesora jest jednak tylko jednym z kilku czynników determinujących szybkoķæ przetwarzania komputera.
HEURISTYCZNA WIEDZA
Czy komputery i roboty mogą uczyæ się na bģędach i poprawiaæ swoją wiedzę metodą prób i bģędów? Czy moŋliwa jest ewolucja maszyny lub sieci maszyn? Niektórzy badacze sztucznej inteligencji (AI) tak uwaŋają. Istnienie heurystycznej wiedzy lub zdolnoķæ maszyny do stania się mądrzejszym w oparciu o rzeczywiste doķwiadczenia - dosģownie ucząc się na wģasnych bģędach - jest klasyczną cechą prawdziwej sztucznej inteligencji. Zaģóŋmy, ŋe opracowano potęŋny komputer, który moŋe ewoluowaæ do coraz wyŋszych poziomów wiedzy. Wyobraž sobie, ŋe jeden dzieņ po uruchomieniu maszyny ma inteligencję równowaŋną inteligencji 10-letniego czģowieka; a po dwóch dniach jest równie mądry (w szczątkowym sensie) jak 20-latek. Zaģóŋmy, ŋe po trzech dniach maszyna ma wiedzę równowaŋną wiedzy 30-letniego inŋyniera badaņ. Zaģóŋmy, ŋe dodaje się coraz więcej pamięci, aby o ograniczeniu wiedzy decydowaģa tylko szybkoķæ mikroprocesora. Jaki będzie taki komputer po miesiącu? Czy będzie miaģ wiedzę 300-letniej osoby (gdyby ludzie ŋyli tak dģugo)? Co więcej, czy stale rosnący poziom inteligencji oznacza, ŋe maszyna moŋe równieŋ staæ się "mądra"? Wiedza o maszynie staje się znacznie potęŋniejsza, gdy komputery biorą pod uwagę moŋliwoķæ sterowania urządzeniami mechanicznymi, jak ma to miejsce w przypadku robotów autonomicznych. Inteligencja i sama wiedza nie są w stanie budowaæ samochodów, mostów, samolotów i rakiet. Byæ moŋe delfiny są tak inteligentne jak ludzie, ale te ssaki morskie nie mają rąk i palców do manipulowania rzeczami. Skomputeryzowany robot jest skierowany do komputera, podobnie jak czģowiek do delfina. Czy komputery mogą kiedykolwiek staæ się mądrzejsze od swoich twórców, a moŋe nawet potęŋniejsze? Niektórzy naukowcy obawiają się, ŋe sztuczna inteligencja będzie niewģaķciwie wykorzystywana lub ŋe moŋe ewoluowaæ samodzielnie z niezamierzonymi, nieoczekiwanymi i nieprzyjemnymi skutkami. Inni badacze uwaŋają, ŋe potencjalne korzyķci wynikające z ciągle rosnącej wiedzy na temat maszyn zawsze będą przewaŋaæ nad potencjalnymi zagroŋeniami i ŋe zawsze moŋemy wyciągnąæ wtyczkę, jeķli sprawy wymkną się spod kontroli.
HIERARCHICZNY PARADYGM
Termin paradygmat hierarchiczny odnosi się do najstarszego z trzech gģównych podejķæ do programowania robotów. Robot, który stosuje paradygmat hierarchiczny, polega w duŋej mierze na wczeķniejszym planowaniu w celu wykonania przydzielonych mu zadaņ. W najbardziej wyrafinowanych systemach robotów istnieją trzy podstawowe funkcje, znane jako planowanie / sens / dziaģanie. Hierarchiczny paradygmat upraszcza to do planowania / dziaģania. Oryginalny pomysģ tego paradygmatu opieraģ się na próbie zmuszenia inteligentnego robota do naķladowania ludzkich procesów myķlowych. Robot najpierw wykrywa naturę swojego ķrodowiska pracy, planuje akcję lub sekwencję akcji, a następnie wykonuje te czynnoķci. W niektórych systemach proces ten występuje tylko raz, na początku zadania; w innych systemach etap planowania powtarza się w odstępach czasu podczas wykonywania zadania. Hierarchiczny paradygmat zostaģ równieŋ nazwany paradygmatem deliberatywnym, poniewaŋ opiera się na tworzeniu staģych modeli ķrodowiska pracy. Kontroler robota dziaģa w pewnym sensie, jakby "zastanawiaģ się" lub "rozwaŋaģ" strategię przed jej wykonaniem. Ten schemat okazaģ się zbyt uproszczony dla wielu praktycznych scenariuszy, a okoģo roku 1990 zostaģ zastąpiony przez bardziej zaawansowane metody programowania.
HIGH-LEVEL LANGUAGE [JĘZYK WYSOKOPOZIOMOWY]
Termin język wysokiego poziomu odnosi się do języków programowania uŋywanych przez ludzi w interakcjach z komputerami. Róŋne języki wysokiego poziomu i mają zalety w niektórych rodzajach pracy, a wady w innych. Język wysokiego poziomu skģada się z wyraŋeņ w języku angielskim (lub innym pisanym języku ludzkim). Dzięki temu ludzie mogą pracowaæ z komputerami na poziomie konwersacji. Większoķæ uczniów uwaŋa, ŋe języki wysokiego poziomu są ģatwe do nauczenia. Najlepszym sposobem na naukę tych języków jest "granie na komputerze", myķląc ķciķle wedģug zasad logiki. Ze względu na czystą logikę programowania, komputery mogą kiedyķ zostaæ wykorzystane do opracowania nowych programów dla innych komputery.
HOBBY ROBOT
Robot hobby to robot przeznaczony gģównie do rozrywki i eksperymentowania. Taka maszyna jest zwykle autonomiczna i zawiera wģasny kontroler. Jest to w rzeczywistoķci wyrafinowana zabawka. Roboty hobby często przyjmują formę humanoidalną; to są androidy. Moŋna je zaprogramowaæ do prowadzenia wykģadów, obsģugi wind, a nawet gry na instrumentach muzycznych. Napędy kóģ są powszechnie stosowane zamiast konstrukcji dwunoŋnych (dwurzędowych), poniewaŋ koģa dziaģają lepiej niŋ nogi, są ģatwiejsze do zaprojektowania i kosztują mniej. Jednak niektóre roboty hobby napędzane są przez napędy gąsienicowe; inne mają cztery lub szeķæ nóg. Niektóre roboty hobby to adaptacje robotów przemysģowych. Ramiona robota moŋna przymocowaæ do gģównego korpusu. W gģowie robota moŋna zainstalowaæ systemy wizyjne, które moŋna wyposaŋyæ do skrętu w prawo i w lewo oraz do kiwania gģową w górę iw dóģ. Rozpoznawanie mowy i synteza mowy mogą pozwoliæ robotowi hobbystycznemu na rozmowę z wģaķcicielem w prostym języku, a nie za pomocą klawiatury i monitora. Dzięki temu maszyna jest bardziej przyjazna dla czģowieka i przyjazna dla uŋytkownika. Byæ moŋe najwaŋniejszą cechą robota hobbystycznego jest sztuczna inteligencja (AI). Im "mądrzejszy" jest robot, tym przyjemniej jest go mieæ. Jest to szczególnie interesujące, gdy maszyna moŋe uczyæ się na swoich bģędach lub zostaæ nauczonym przez wģaķciciela. Stowarzyszenia robotów Hobby istnieją w Stanach Zjednoczonych i kilku innych krajach rozwiniętych. Często ewoluują i zmieniają swoje imiona. Jeķli mieszkasz w duŋym mieķcie, byæ moŋe znajdujesz się w pobliŋu takiej organizacji.
HOLD [TRZYMANIE]
Trzymanie, jest stanem, w którym ruchy częķci lub caģoķci manipulatora robota zostają tymczasowo zatrzymane. Gdy to nastąpi, siģa hamowania zostaje zachowana, więc zatrzymane częķci są odporne na ruch, jeķli zastosowane zostanie ciķnienie zewnętrzne. Typowe metody zapewniania siģy hamowania obejmują uŋycie napędu hydraulicznego lub krokowego silnik. Trzymanie moŋe byæ częķcią zaprogramowanej sekwencji ruchu ramienia robota i efektora koņcowego. Dobrym przykģadem jest sytuacja, w której robot portalowy jest uŋywany do pozycjonowania komponentu do dostarczania kropli.
HOME POSITION [POZYCJA WYJĶCIOWA]
W manipulatorze robota pozycja początkowa to punkt, w którym efektor koņcowy zwykle zatrzymuje się. Gdy robot jest wyģączany lub trzeba go zresetowaæ, maszyna powraca do pozycji wyjķciowej. Gdy do zdefiniowania poģoŋenia efektora koņcowego uŋywany jest ukģad wspóģrzędnych, poģoŋenie początkowe jest często przypisywane do punktu początkowego. Zatem na przykģad w ramieniu robota i efektorze koņcowym za pomocą dwuwymiarowej (2-D) . Geometria wspóģrzędnych kartezjaņskich, pozycji początkowej moŋna przypisaæ wartoķæ (x, y) = (0, 0).
HUMAN ENGINEERING [INŊYNIERIA LUDZKA]
Inŋynieria ludzka odnosi się do sztuki tworzenia maszyn, zwģaszcza komputerów i robotów, ģatwych w uŋyciu. Czasami nazywa się to równieŋ przyjaznoķcią dla uŋytkownika. Przyjazny dla uŋytkownika program komputerowy pozwala na obsģugę maszyny przez osobę, która nic nie wie o komputerach. Bankomaty (bankomaty) są dobrym przykģadem urządzeņ wykorzystujących programowanie przyjazne dla uŋytkownika. Biblioteki coraz częķciej komputeryzują swoje katalogi kart i waŋne jest, aby programy byģy przyjazne dla uŋytkownika, aby ludzie mogli znaležæ ksiąŋki, których chcą. Istnieje wiele innych przykģadów. Przyjazny dla uŋytkownika robot moŋe skutecznie, niezawodnie i rozsądnie szybko realizowaæ zamówienia. Idealnie, operator moŋe powiedzieæ coķ w stylu: "Idž do kuchni i przynieķ mi jabģko" i (zakģadając, ŋe w kuchni są jakieķ jabģka) robot wróci za minutę lub dwie, trzymając jabģko. Jak odkryli naukowcy, takie pozornie proste zadanie jest trudne do zaprogramowania w maszynie. Nawet najbardziej podstawowe zadania są zģoŋone pod względem liczby i kombinacji operacji logiki cyfrowej. Jednym z najwaŋniejszych zagadnieņ w inŋynierii ludzkiej jest sztuczna inteligencja (AI). O wiele ģatwiej jest komunikowaæ się z maszyną "inteligentną" w porównaniu z maszyną "gģupią". Jest to szczególnie przyjemne, gdy maszyna moŋe uczyæ się na bģędach lub wykazywaæ zdolnoķæ rozumowania. Rozpoznawanie mowy i synteza mowy pomagają równieŋ uczyniæ komputery i roboty przyjaznymi dla uŋytkownika.
HUNTING
Hunting jest wynikiem nadmiernej kompensacji w serwomechanizmie. Jest to szczególnie prawdopodobne, gdy w odpowiedzi systemu nie ma wystarczającej histerezy lub powolnoķci. Kaŋdy obwód lub urządzenie zaprojektowane do blokowania się na czymķ, za pomocą korekcji bģędów, podlega polowaniu. Przybiera postaæ oscylacji w obie strony między dwoma warunkami. Jeķli jest powaŋny, moŋe trwaæ w nieskoņczonoķæ. W mniej powaŋnych przypadkach system ostatecznie ustala się na wģaķciwym poziomie lub pozycji. Hunting eliminuje się dzięki starannemu zaprojektowaniu systemów sprzęŋenia zwrotnego, więc istnieje odpowiednia iloķæ histerezy.
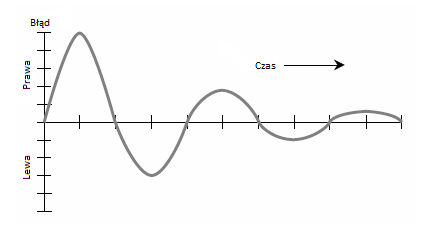
HYBRYDOWY DELIBERACYJNY / REAKTYWNY PARADYGM
Hybrydowy paradygmat celowy / reaktywny to podejķcie do programowania inteligentnego robota, które ģączy atrybuty dwóch prostszych schematów, znanych jako paradygmat hierarchiczny i paradygmat reaktywny. Hybrydowy paradygmat zyskaģ uznanie w latach 90. Dziaģa zgodnie z podstawowym planem / zmysģem / dziaģaniem. Dziaģania opierają się na wczeķniejszym planowaniu, a takŋe na wynikach czujników z chwili na chwilę. Przed rozpoczęciem zadania robot generuje plan pracy. Nazywa się to planowaniem misji i jest formą rozwaŋaņ. Zģoŋone zadanie jest podzielone na kilka komponentów lub podzadaņ. Kaŋda podzadanie ma swój wģasny plan. Gdy robot zacznie wykonywaæ zadanie, wykonuje plan, a podplany podlegają modyfikacjom, które mogą byæ konieczne w przypadku zmiany ķrodowiska pracy. Zmiany te są wynikiem sygnaģów z czujników. W typowym robocie wykorzystującym paradygmat hybrydowy narady odbywają się w odstępach kilku sekund, a reakcje zachodzą z częstotliwoķcią wiele razy na sekundę.
HYDRAULICZNY NAPĘD
Napęd hydrauliczny to metoda zapewniania ruchu manipulatora robota.. Uŋywa specjalnego pģynu hydraulicznego, zwykle na bazie oleju, do przenoszenia siģ na róŋne stawy, sekcje teleskopowe i efektory koņcowe. Napęd hydrauliczny skģada się z zasilacza, jednego lub więcej silników, zestawu tģoków i zaworów oraz pętli sprzęŋenia zwrotnego. Zawory i tģoki kontrolują ruch pģynu hydraulicznego. Poniewaŋ pģyn hydrauliczny jest praktycznie nieķciķliwy, moŋliwe jest generowanie duŋych siģ mechanicznych na maģych powierzchniach lub, przeciwnie, ustawianie tģoków o duŋych powierzchniach z wyjątkową dokģadnoķcią. Pętla sprzęŋenia zwrotnego skģada się z jednego lub więcej czujników siģy, które zapewniają korekcję bģędów i zapewniają, ŋe manipulator podąŋa zamierzoną ķcieŋką. Hydraulicznie sterowane manipulatory są uŋywane, gdy ruchy muszą byæ szybkie, precyzyjne i powtarzane wiele razy. Znane są równieŋ ukģady hydrauliczne ze względu na zdolnoķæ do przenoszenia znacznej siģy, dlatego są one dobre do zastosowaņ wymagających duŋego podnoszenia lub przyģoŋenia duŋych wartoķci ciķnienia lub momentu obrotowego. Ponadto hydraulicznie sterowane manipulatory robotów są odporne na niepoŋądane ruchy w obecnoķci siģ zewnętrznych.
Powrót
W komputerach i inteligentnych robotach często trzeba dokonywaæ wyborów podczas wykonywania programu. Jednym z najczęstszych procesów decyzyjnych dotyczących programowania jest IF / THEN / ELSE. Moŋna to wyraziæ jako zdanie: "Jeķli A, to B; inaczej (lub inaczej) C. " Przykģad procesu IF / THEN / ELSE pokazano na ilustracji. Celem jest okreķlenie wartoķci bezwzględnej liczby rzeczywistej. Zaģóŋmy, ŋe komputer pracuje z numerem wejķciowym oznaczonym x. Jeķli x jest ujemne (to znaczy, jeķli x < 0), to x naleŋy pomnoŋyæ przez 1, aby uzyskaæ wartoķæ bezwzględną | x |. Jeķli x jest równe zero lub dodatnie, to x jest równe jego wartoķci bezwzględnej. Komputer musi porównaæ wartoķæ liczbową x z zerem. Maszyna wyķwietli następnie wartoķæ bezwzględną liczby, mnoŋąc x przez 1 lub pozostawiając x w spokoju. Procesy IF / THEN / ELSE są szczególnie uŋytecznymi strukturami poleceņ dla robotów. Moŋesz powiedzieæ robotowi: "Idž do kuchni i przynieķ mi papierową serwetkę". Sterownik robota ma strukturę poleceņ zapisaną na dysku twardym lub w pamięci. Potrzebuje alternatywy na wypadek, gdyby w kuchni nie byģo papierowych serwetek. Programowanie moŋe przyjąæ postaæ: "Jeķli to polecenie moŋna wykonaæ, wykonaj zadanie. W przeciwnym razie wyķlij komunikat audio "Twoje zamówienie nie moŋe zostaæ zrealizowane, poniewaŋ w kuchni nie ma papierowych serwetek". "
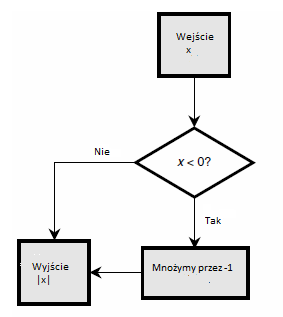
IMAGE ORTHICON [ORTIKON OBRAZOWY]
Ortikon obrazowy to rura kamery wideo, podobna do vidicon. Przydaje się w umiarkowanym i sģabym ķwietle. Ilustracja jest uproszczonym schematem funkcjonalnym ortikonu obrazu. Wąska wiązka elektronów emitowana z dziaģa elektronowego skanuje elektrodę docelową. Częķæ tej wiązki jest odbijana. Chwilowa iloķæ odbitej energii wiązki elektronów zaleŋy od emisji elektronów wtórnych z elektrody docelowej. Liczba elektronów wtórnych zaleŋy od tego, ile ķwiatģa uderza w elektrodę docelową w danym miejscu. Największa intensywnoķæ wiązki powrotnej odpowiada najjaķniejszym częķciom obrazu wideo. W związku z tym wiązka zwrotna jest modulowana amplitudowo, skanując elektrodę docelową wedģug wzoru odpowiadającego wzorowi skanowania w kineskopie telewizyjnym (telewizyjnym). Wiązka zwrotna uderza w czujnik zwany fotoreceptorem. Wyjķcie fotoreceptora jest podawane do wzmacniacza, takiego jak fotopowielacz. Stamtąd dane wyjķciowe są przetwarzane przez komputer lub sterownik robota. Gģównym ograniczeniem ortikonu obrazu jest to, ŋe wytwarza on znaczny szum oprócz wyjķcia sygnaģu. Jednak gdy potrzebna jest szybka reakcja (na przykģad, gdy na scenie występuje duŋo akcji), a intensywnoķæ oķwietlenia zmienia się w szerokim zakresie, przydatna jest orteza obrazu. Moŋna go stosowaæ w systemach wizyjnych robotów, które szybko przetwarzają obrazy, i / lub które dziaģają w ķrodowisku pracy, w którym natęŋenie ķwiatģa otoczenia moŋe się dramatycznie zmieniæ.
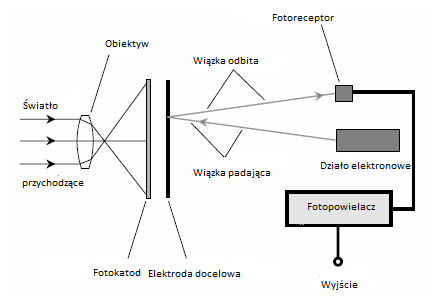
IMMORTAL KNOWLEDGE [NIEĶMIERTELNA WIEDZA]
W krajach rozwiniętych i rozwijających się komputery spowodowaģy transformacje w kulturze ludzkiej. Jedyną rolą, jaką muszą odgrywaæ ludzie, w gromadzeniu wiedzy w ogólnej elektronicznej bazie danych, jest wprowadzanie danych do systemów. Zanim zaistniaģy komputery (przed okoģo 1950 r.), historia przekazywana byģa z pokolenia na pokolenie w formie ksiąŋek i opowiadaņ sģownych. Jeķli czytasz ksiąŋkę napisaną 200 lat temu, interpretujesz wydarzenia nieco inaczej niŋ myķlaģ o nich pierwotny autor. Jest tak, poniewaŋ spoģeczeņstwo nie jest takie samo, jak dwa wieki temu. Wartoķci się zmieniģy. Ludzie mają róŋne priorytety i przekonania. Kiedy historia jest zapisywana w ksiąŋkach lub opowiadana jako historie, większoķæ informacji jest po prostu tracona, nigdy nie do odzyskania. Komputery mogą jednak przechowywaæ dane w nieskoņczonoķæ. W pewnym stopniu komputery mogą interpretowaæ i przechowywaæ dane. Niektórzy naukowcy uwaŋają, ŋe zmniejszy to tempo zmian ludzkich trybów myķlowych w dģuŋszych okresach czasu. Moŋe równieŋ powodowaæ, ŋe ludzie w róŋnych częķciach ķwiata i róŋnych kultur będą myķleæ podobnie. Komputery wprowadzą maģe szczegóģy w informacjach (i bģędnych informacjach) bardziej trwaģe. Jeķli zostaną doprowadzone do skrajnoķci, komputery dadzą ludzkoķci wiedzę, która trwa zasadniczo wiecznie. Nazywa się to nieķmiertelną wiedzą. Kopię zapasową danych przechowywanych na dowolnym noķniku moŋna zapobiec, aby zapobiec utracie z powodu awarii komputera, sabotaŋu i starzenia się dysków i taķm. Kaŋdy fakt, kaŋdy szczegóģ, a byæ moŋe takŋe wszelkie subtelne znaczenie, mogą byæ przekazywane niezmienione przez stulecie. Niektórzy inŋynierowie twierdzą, ŋe komputeryzacja moŋe mieæ szkodliwy wpģyw na zachowanie i gromadzenie ludzkiej wiedzy. Dane komputerowe są ģatwiejsze niŋ kopie papierowe (takie jak ksiąŋki, zwoje i inne pisemne dokumenty) do manipulowania na duŋą skalę. Nie jest wykluczone, ŋe kilku genialnych ludzi o nikczemnych zamiarach mogģo dosģownie przepisaæ historię i nikt, pokolenia póžniej, nie byģby mądrzejszy.
INCOMPLETENESS THEOREM [TEORIA NIEKOMPLETNOĶCI]
W 1931 roku mģody matematyk o nazwisku Kurt Gödel odkryģ coķ o logice, która zmieniģa sposób myķlenia ludzi o rzeczywistoķci. Twierdzenie o niekompletnoķci wykazaģo, ŋe niemoŋliwe jest udowodnienie wszystkich prawdziwych stwierdzeņ w systemie logicznym pierwszego rzędu. W kaŋdym takim systemie myķlenia istnieją nierozstrzygalne zdania. W systemach matematycznych poczyniono pewne zaģoŋenia. Są to tak zwane aksjomaty lub postulaty. Do udowodnienia twierdzeņ opartych na aksjomatach stosowane są reguģy logiczne. Idealnie byģoby, gdyby nie byģo sprzecznoķci; mamy spójny zestaw aksjomatów. Jeķli zostanie znaleziona sprzecznoķæ, mamy niespójny zestaw aksjomatów. Ogólnie rzecz biorąc, im silniejszy zestaw aksjomatów - to znaczy, im większa jest liczba implikowanych stwierdzeņ opartych na nich - tym większa jest szansa na uzyskanie sprzecznoķci. System logiczny z zestawem zbyt silnych aksjomatów dosģownie się rozpada, poniewaŋ po znalezieniu sprzecznoķci kaŋde stwierdzenie, bez względu na to, jak absurdalne, staje się moŋliwe do udowodnienia. Jeķli zestaw aksjomatów jest zbyt sģaby, to nie wytwarza wiele nic znaczącego. Przez stulecia matematycy starali się budowaæ "wszechķwiaty myķlowe" z elegancją i treķcią, ale bez sprzecznoķci. Gödel wykazaģ, ŋe dla kaŋdego spójnego zestawu aksjomatów istnieje więcej prawdziwych stwierdzeņ niŋ twierdzeņ moŋliwych do udowodnienia. Zbiór instrukcji, które moŋna udowodniæ, jest wģaķciwym podzbiorem zbioru wszystkich prawdziwych instrukcji, który z kolei jest wģaķciwym podzbiorem zbioru wszystkich moŋliwych instrukcji (patrz ilustracja). Wynika z tego, ŋe w kaŋdym systemie logicznym bez sprzecznoķci nie moŋna ustaliæ "caģej prawdy". Twierdzenie o niekompletnoķci ma wpģyw na zaangaŋowanych inŋynierów ze sztuczną inteligencją (AI). Mówiąc ogólnie, niemoŋliwe jest zbudowanie "uniwersalnej maszyny prawdy", komputera, który bez ŋadnych wątpliwoķci moŋe ustaliæ matematycznie, czy dane stwierdzenie jest prawdziwe, czy faģszywe.
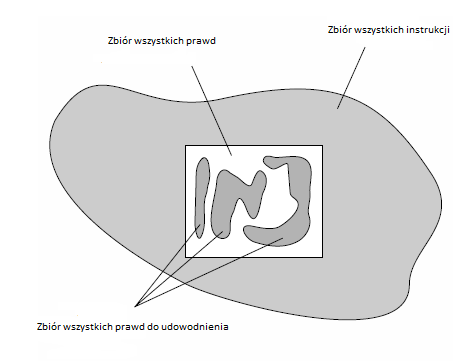
INDUKCYJNY CZUJNIK ZBLIŊENIOWY
Indukcyjny czujnik zbliŋeniowy wykorzystuje interakcje elektromagnetyczne zachodzące między metalowymi przedmiotami lub między nimi, gdy znajdują się one blisko siebie. Indukcyjny czujnik zbliŋeniowy wykorzystuje oscylator o częstotliwoķci radiowej (RF), detektor częstotliwoķci oraz cewkę z rdzeniem ze sproszkowanego ŋelaza podģączoną do obwodu oscylatora, jak pokazano na schemacie. Oscylator jest zaprojektowany w taki sposób, ŋe zmiana pola strumienia magnetycznego w rdzeniu cewki indukcyjnej powoduje zmianę częstotliwoķci. Ta zmiana jest wykrywana przez detektor częstotliwoķci, który wysyģa sygnaģ do urządzenia sterującego robotem. W ten sposób, jeķli system jest odpowiednio zaprojektowany, robot moŋe uniknąæ wpadania na metalowe przedmioty. W niektórych detektorach zmiana strumienia powoduje caģkowite zatrzymanie oscylacji. Tak zwane wykrywacze metalu, których ludzie uŋywają do wyszukiwania monet i biŋuterii na plaŋy, są typowymi przykģadami urządzeņ wykorzystujących indukcyjne czujniki zbliŋeniowe
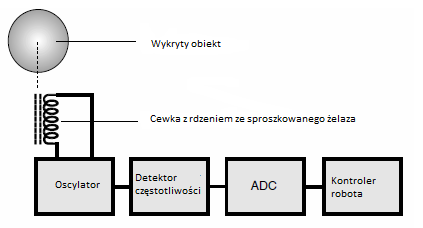
Przedmioty, które nie przewodzą prądu, takie jak drewno i plastik, nie mogą zostaæ wykryte przez indukcyjne czujniki zbliŋeniowe. Dlatego teŋ inne rodzaje czujników zbliŋeniowych są niezbędne, aby robot dobrze nawigowaģ w zģoŋonym ķrodowisku, takim jak dom lub biuro.
INDUSTRIAL ROBOT [ROBOT PRZEMYSĢOWY]
Robot przemysģowy, jak sama nazwa wskazuje, jest robotem stosowanym w przemyķle. Takie roboty mogą byæ staģe lub mobilne i mogą pracowaæ w budownictwie, produkcji, pakowaniu i kontroli jakoķci. Moŋna je równieŋ stosowaæ w laboratoriach. Wķród konkretnych zastosowaņ robotów przemysģowych są: spawanie, lutowanie, wiercenie, cięcie, kucie, malowanie natryskowe, przenoszenie szkģa, obróbka cieplna, zaģadunek i rozģadunek, formowanie tworzyw sztucznych, butelkowanie, konserwowanie, odlewanie, zbieranie owoców, kontrola i cechowanie. Dwaj inŋynierowie, George Devol i Joseph Engelberger, byli w duŋej mierze odpowiedzialni za zainteresowanie kierownictwa przemysģu robotami. Początkowo trudno byģo przekonaæ ludzi biznesu, ale Devol i Engelberger tģumaczyli rzeczy na język, który rozumieli ludzie biznesu: zysk. Robotyzacja przemysģu nie zostaģa przyjęta przez wszystkich. W niektórych branŋach ludzie zostali wysiedleni przez roboty, co pozbawia ludzi pracy. Jednak rozsądne uŋycie robotów w przemyķle moŋe poprawiæ bezpieczeņstwo pracowników, poniewaŋ maszyny mogą wykonywaæ zadania, które byģyby niebezpieczne lub ķmiertelnie niebezpieczne, jeķli zrobią to ludzie.
INFERENCYJNY SILNIK
Silnik wnioskowania to obwód, który przekazuje instrukcje robotowi. Robi to poprzez zastosowanie zaprogramowanych reguģ do poleceņ wydawanych przez czģowieka. Mechanizm wnioskowania przypomina komputer, który wykonuje operacje IF / THEN / ELSE na bazie danych faktów. Silnik wnioskowania jest funkcjonalną częķcią systemu eksperckiego.
INFINITE REGRESS [NIESKOŅCZONY REGRES]
Nieskoņczony regres jest hipotetycznym scenariuszem, w którym logiczny proces lub sekwencja transferu danych rozciąga się w czasie w nieskoņczonoķæ, nie mając w ten sposób oryginalnego žródģa. Pozorne istnienie nieskoņczonego regresu jest czasem traktowane jako wskazówka, ŋe coķ jest nie tak z logicznym argumentem. Większoķæ inŋynierów i naukowców uwaŋa, ŋe komputery nie mogą tworzyæ oryginalnych informacji. Zaģoŋono, ŋe istotne dane muszą pochodziæ spoza maszyny. Pomysģ przechowywany na komputerze moŋe pochodziæ z innego komputera, ale jeķli tak, to skąd go wziąģ poprzedni komputer? Od czģowieka, czy z innego komputera? Opierając się na zaģoŋeniu, ŋe komputer nie jest w stanie wygenerowaæ oryginalnej myķli, wynika, ŋe kaŋdy pomysģ musi pochodziæ albo z nieskoņczonej serii komputerów, jednego przed drugim, bez początku, albo od jakiegoķ czģowieka. Ģatwiej jest zrozumieæ ten drugi scenariusz. Poza tym komputery istnieją juŋ od kilku dziesięcioleci, więc w prawdziwym ķwiecie nieskoņczony regres wiedzy opartej wyģącznie na komputerach jest niemoŋliwy. Niektórzy naukowcy nie mają problemu z poglądem, ŋe maszyna moŋe "wymyķliæ" wiedzę. Sugerują, ŋe jeķli czģowiek moŋe wymyķliæ oryginalną myķl, wówczas wystarczająco zģoŋona maszyna powinna byæ w stanie zrobiæ to samo. Jeszcze inni naukowcy sugerują, ŋe nie ma czegoķ takiego jak oryginalna myķl. Zgodnie z tą teorią nawet najbardziej bģyskotliwi i wnikliwi ludzie są niczym więcej niŋ wyrafinowanymi procesorami informacji, a caģa wiedza jest wynikiem procesów atomowych i chemicznych w ludzkim mózgu.
INPUT/OUTPUT MODULE [MODUĢ WEJĶCIA / WYJĶCIA]
Moduģ wejķcia / wyjķcia, symbolizowane przez I/O, to ģącze danych między mikroprocesorem a urządzeniami peryferyjnymi komputera. W systemach robotycznych moduģy we / wy przesyģają dane ze sterownika do częķci mechanicznych i odwrotnie. Moduģy we / wy mogą równieŋ ģączyæ ze sobą sterowniki robotów lub ģączyæ wiele robotów z komputerem centralnym. Ilustracja pokazuje hipotetyczny przykģad sytuacji, w której uŋywane są moduģy I / O. Trójkąty oznaczone "R" to roboty; okręgi oznaczone "I / O" to moduģy I / O. W tym przykģadzie są dwa osobne systemy robotów, a ich kontrolery są poģączone przez moduģ I / O, umoŋliwiając komunikację między systemami. Jak sama nazwa wskazuje, obwód we / wy przenosi dane w dwóch kierunkach: do i z mikroprocesora. Robi to jednoczeķnie, więc jest to moduģ fullduplex.
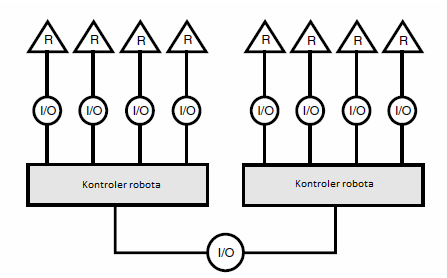
INSECT ROBOT
Robot owadowy jest czģonkiem zespoģu identycznych robotów, które dziaģają pod kontrolą jednego kontrolera, zwykle w celu wykonania jednego zadania lub zestawu zadaņ. Taki robot jest równieŋ znany jako robot roju. Caģa grupa takich robotów nazywana jest spoģeczeņstwem, zespoģem wieloagentowym lub rojem. W szczególnoķci termin robot owadowy jest uŋywany w odniesieniu do systemów zaprojektowanych przez inŋyniera Rodneya Brooksa. Zacząģ rozwijaæ swoje pomysģy w Massachusetts Institute of Technology (MIT) na początku lat dziewięædziesiątych. Roboty owadowe mają szeķæ nóg, a niektóre z nich faktycznie wyglądają jak chrząszcze lub karaluchy. Mają dģugoķæ od mniej niŋ 1 mm do więcej niŋ 300 mm. Najwaŋniejszy jest fakt, ŋe pracują raczej wspólnie niŋ jako jednostki. Autonomiczne roboty z niezaleŋnymi kontrolerami są "inteligentne", ale niekoniecznie pracują w zespole. Ludzie dają dobry przykģad. Profesjonalne druŋyny sportowe zostaģy zgromadzone poprzez zakup usģug najlepszych zawodników w branŋy, ale zespóģ taki rzadko osiąga status mistrzowski, chyba ŋe gracze wspóģpracują. Owady natomiast są "gģupie w czģowieku". Mrówki i pszczoģy są jak idioty, ale mrowisko lub ul to wydajny system, zarządzany przez zbiorowy umysģ wszystkich jego czģonków. Rodney Brooks zauwaŋyģ tę zasadniczą róŋnicę między inteligencją autonomiczną a zbiorową, a takŋe, ŋe większoķæ jego kolegów próbowaģa budowaæ autonomiczne roboty, byæ moŋe z powodu naturalnej skģonnoķci ludzi do wyobraŋania sobie robotów jako humanoidalnych. Dla Brooksa byģo oczywiste, ŋe zaniedbano gģówną drogę technologii. W ten sposób zacząģ projektowaæ zespoģy robotów, skģadające się z wielu jednostek z jednym kontrolerem. Brooks jest futurystą, który przewiduje mikroskopijne roboty owadowe, które mogą mieszkaæ w twoim domu, wychodząc w nocy, aby wyczyķciæ podģogi i blaty. za pomocą centralnego mikroprocesora mogliby znaležæ bakterie lub wirusy i poģknąæ je.
INTEGRAL [CAĢKA]
Termin caģka odnosi się do obszaru pod krzywą funkcji matematycznej. Na przykģad przemieszczenie jest caģką prędkoķci lub prędkoķci, która z kolei jest caģką przyspieszenia. Rysunek 1 pokazuje ogólny wykres prędkoķci w funkcji czasu. Krzywa tej funkcji jest linią prostą. Moŋe to oznaczaæ staģy wzrost prędkoķci przyspieszającego robota mobilnego. Podczas gdy prędkoķæ stale wzrasta, przemieszczenie wskazane przez obszar pod krzywą roķnie w szybszym tempie.
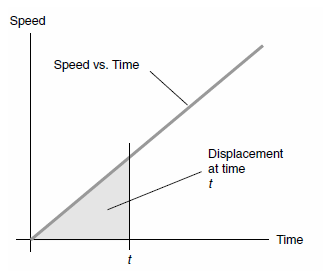
W elektronice cyfrowej obwód, który stale przyjmuje caģkę fali wejķciowej, nazywa się integratorem. Przykģad dziaģania integratora pokazano na wykresie na rysunku 2. Sygnaģ wejķciowy jest falą sinusoidalną. Wyjķcie jest matematycznie falą cosinus ujemną, ale pojawia się jako fala sinusoidalna, która zostaģa przesunięta o 90 ° lub jedną czwartą cyklu.
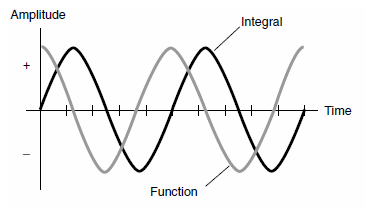
INTEGRATED CIRCUIT [UKĢAD SCALONY]
Ukģad scalony (IC) to urządzenie elektroniczne zawierające wiele diod, tranzystorów, rezystorów i / lub kondensatorów wykonanych na pģytce lub chipie z materiaģu póģprzewodnikowego. Ukģad jest zamknięty w maģej paczce ze stykami do poģączenia z komponentami zewnętrznymi. Ukģady scalone są szeroko stosowane w robotach i ich kontrolerach.
Aktywa i ograniczenia
Urządzenia i ukģady z ukģadami scalonymi są znacznie bardziej kompaktowe niŋ równowaŋne obwody wykonane z elementów dyskretnych. Bardziej zģoŋone obwody moŋna budowaæ i utrzymywaæ na rozsądnym poziomie, stosując ukģady scalone w porównaniu z elementami dyskretnymi. Na przykģad istnieją notebooki o bardziej zaawansowanych moŋliwoķciach niŋ wczesne komputery, które zajmowaģy caģe pokoje. W ukģadzie scalonym poģączenia między komponentami są fizycznie niewielkie, co umoŋliwia wysokie prędkoķci przeģączania. Prądy elektryczne przemieszczają się szybko, ale nie natychmiastowo. Im szybciej noķniki ģadunku przemieszczają się z jednego komponentu na drugi, tym więcej operacji moŋna wykonaæ w jednostce czasu i tym mniej czasu potrzeba na zģoŋone operacje. Ukģady scalone zuŋywają mniej energii niŋ równowaŋne ukģady dyskretne. Jest to waŋne, jeķli uŋywane są baterie. Poniewaŋ ukģady scalone pobierają tak maģo prądu, wytwarzają mniej ciepģa niŋ ich dyskretne odpowiedniki. Powoduje to lepszą wydajnoķæ i minimalizuje problemy, które nękają sprzęt, który się nagrzewa podczas uŋytkowania, takie jak przesunięcie częstotliwoķci i generowanie wewnętrznego haģasu. Systemy wykorzystujące ukģady scalone zawodzą rzadziej, na godzinę uŋytkowania komponentu, niŋ systemy wykorzystujące komponenty dyskretne. Wynika to gģównie z tego, ŋe wszystkie poģączenia są uszczelnione w obudowie ukģadu scalonego, zapobiegając korozji lub przedostawaniu się pyģu. Zmniejszony wskažnik awarii przekģada się na mniej przestojów. Technologia ukģadów scalonych obniŋa koszty serwisu, poniewaŋ procedury naprawcze są proste w przypadku awarii. Wiele systemów uŋywa gniazd do ukģadów scalonych, a wymiana polega jedynie na znalezieniu wadliwego ukģadu scalonego, odģączeniu go i podģączeniu nowego. Specjalny sprzęt do rozlutowywania sģuŋy do serwisowania pģytek drukowanych, których ukģady scalone są przylutowane bezpoķrednio do folii. Nowoczesne urządzenia IC wykorzystują budowę moduģową. Poszczególne ukģady scalone wykonują okreķlone funkcje w obrębie pģytki drukowanej; pģytka drukowana lub karta z kolei pasuje do gniazda i ma okreķlony cel. Komputery, zaprogramowane z dostosowanym oprogramowaniem, są uŋywane przez techników do zlokalizowania wadliwej karty w systemie. Kartę moŋna wyciągnąæ i wymieniæ, dzięki czemu system wróci do uŋytkownika w najkrótszym moŋliwym czasie.
Liniowe ukģady scalone
Liniowy ukģad scalony sģuŋy do przetwarzania sygnaģów analogowych, takich jak gģosy, muzyka i większoķæ transmisji radiowych. Termin "liniowy" wynika z faktu, ŋe chwilowa moc wyjķciowa jest liniową funkcją chwilowej mocy wejķciowej. Wzmacniacz operacyjny (zwany takŋe wzmacniaczem operacyjnym) skģada się z kilku tranzystorów, rezystorów, diod i kondensatorów poģączonych ze sobą w celu uzyskania duŋego wzmocnienia w szerokim zakresie częstotliwoķci. Wzmacniacz operacyjny ma dwa wejķcia i jedno wyjķcie. wejķcie nieodwracające, wyjķcie jest z nim w fazie; gdy sygnaģ jest podawany na wejķcie odwracające, wyjķcie jest z nim o 180 ° poza fazą. Wzmacniacz operacyjny ma dwa poģączenia zasilania, jedno dla emiterów tranzystorów (Vee) i jedno dla kolektorów
(Vcc). Symbolem wzmacniacza operacyjnego jest trójkąt. Poģączenia wejķciowe, wyjķciowe i zasilające są rysowane jako linie wychodzące z trójkąta. Charakterystyki wzmocnienia wzmacniacza operacyjnego są okreķlone przez rezystory zewnętrzne. Zwykle rezystor jest podģączony między wyjķciem a wejķciem odwracającym. Jest to konfiguracja w pętli zamkniętej. Sprzęŋenie zwrotne jest ujemne, co powoduje, ŋe wzmocnienie jest mniejsze niŋ byģoby, gdyby nie byģo sprzęŋenia zwrotnego (konfiguracja w otwartej pętli). Wzmacniacz z zamkniętą pętlą wykorzystujący wzmacniacz operacyjny pokazano poniŋej
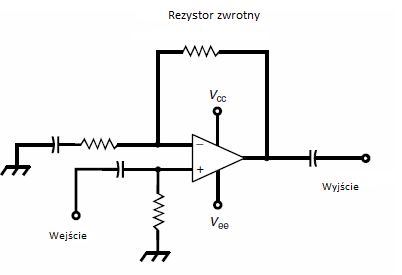
Gdy kombinacja rezystor-kondensator (RC) jest uŋywana w pętli sprzęŋenia zwrotnego wzmacniacza operacyjnego, wspóģczynnik wzmocnienia zmienia się wraz z częstotliwoķcią. Moŋliwe jest uzyskanie odpowiedzi dolnoprzepustowej, odpowiedzi górnoprzepustowej, piku rezonansowego lub wycięcia rezonansowego za pomocą wzmacniacza operacyjnego i róŋnych ukģadów sprzęŋenia zwrotnego RC. Regulator napięcia IC dziaģa w celu kontrolowania napięcia wyjķciowego zasilacza. Jest to waŋne w przypadku precyzyjnego sprzętu elektronicznego. Te ukģady scalone są dostępne w róŋnych róŋnych wartoķciach napięcia i prądu. Typowe ukģady scalone regulatora napięcia mają trzy zaciski. Wyglądają jak tranzystory mocy. Ukģad czasowy IC jest formą oscylatora. Daje opóžnione wyjķcie, przy czym opóžnienie jest zmienne w zaleŋnoķci od potrzeb konkretnego urządzenia. Opóžnienie jest generowane przez zliczenie liczby impulsów oscylatora. Dģugoķæ opóžnienia jest regulowana za pomocą zewnętrznych rezystorów i kondensatorów. Multiplekser IC umoŋliwia poģączenie kilku róŋnych sygnaģów w jednym kanale za pomocą multipleksowania z podziaģem czasu, w sposób podobny do tego stosowanego w modulacji impulsowej.
Analogowy multiplekser moŋe byæ równieŋ uŋywany w odwrotnej kolejnoķci; wtedy dziaģa jako demultiplekser. Podobnie jak wzmacniacz operacyjny, komparator ma dwa wejķcia. Urządzenie porównuje napięcia na dwóch wejķciach (zwanych A i B). Jeķli sygnaģ wejķciowy w punkcie A jest znacznie większy niŋ sygnaģ wejķciowy w punkcie B, sygnaģ wyjķciowy wynosi okoģo +5 V. Jest to logiczne 1 lub wysokie. Jeķli wejķcie w punkcie A nie jest większe niŋ wejķcie w punkcie B, napięcie wyjķciowe wynosi okoģo +2 V. Jest to oznaczone jako logiczne 0 lub niskie. Komparatory są stosowane do uruchamiania lub wyzwalania innych urządzeņ, takich jak przekažniki i elektroniczne obwody przeģączające. Mają róŋne zastosowania w systemach robotycznych.
Cyfrowe ukģady scalone
Cyfrowe ukģady scalone skģadają się z bramek, które wykonują operacje logiczne przy duŋych prędkoķciach. Istnieje kilka róŋnych technologii, z których kaŋda ma unikalne cechy. Technologia cyfrowo-logiczna moŋe wykorzystywaæ dwubiegunowe i / lub tlenkowo-metalowe urządzenia póģprzewodnikowe. W logice tranzystor-tranzystor (TTL) ukģady tranzystorów bipolarnych, niektóre z wieloma emiterami, dziaģają na impulsach prądu staģego. Bramka TTL jest zilustrowana tu
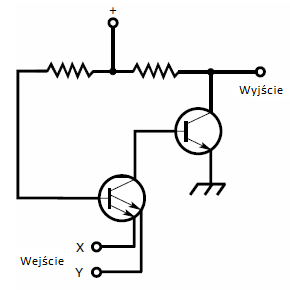
Tranzystory są odcięte lub nasycone; nie ma "pomiędzy".
Z tego powodu obwód TTL jest stosunkowo odporny na zakģócenia zewnętrzne. Inna postaæ logiczna tranzystora bipolarnego jest znana jako logika sprzęŋona z emiterem (ECL). W ECL tranzystory nie dziaģają przy nasyceniu, podobnie jak w TTL. Zwiększa to szybkoķæ dziaģania ECL w porównaniu z TTL. Jednak impulsy szumowe mają większy wpģyw na ECL, poniewaŋ nienasycone tranzystory wzmacniają, a takŋe sygnaģy przeģączające. Schemat z ryc. 3 pokazuje prostą bramkę ECL.
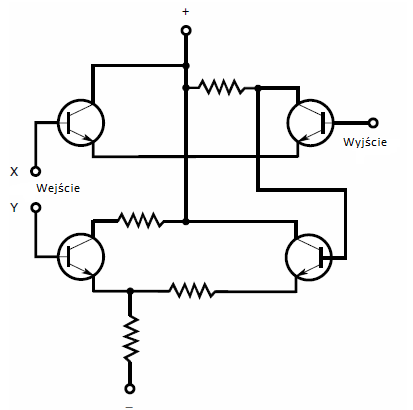
Logika N-kanaģowa metal-tlenek-póģprzewodnik (NMOS) oferuje prostotę projektu wraz z duŋą prędkoķcią roboczą. Logika P-kanaģowego tlenku metalu (PMOS) jest podobna do NMOS, ale prędkoķæ jest mniejsza. Cyfrowy ukģad scalony NMOS lub PMOS jest jak obwód, który wykorzystuje tylko tranzystory polowe z tranzystorami polowymi (FET) lub tylko FET z kanaģem P. Logika komplementarnego tlenku metalu-póģprzewodnika (CMOS) wykorzystuje zarówno krzem typu N, jak i P na jednym ukģadzie. Jest to analogiczne do korzystania z FET Nchannel i kanaģu P w obwodzie. Gģównymi zaletami CMOS są wyjątkowo niski pobór prądu, duŋa prędkoķæ robocza i odpornoķæ na haģas.
INTEREST OPERATOR [OPERATORA ZAINTERESOWANIA]
W wizji maszynowej operator zainteresowania to algorytm, który wybiera "interesujące" piksele (elementy obrazu) na obrazie. "Interesujące" w tym kontekķcie odnosi się do pikseli róŋniących się od większoķci znajdujących się w ich pobliŋu. Przykģady obejmują ciemne lub jasne punkty, róŋne kolory, ostre krawędzie, linie i krzywe. Zainteresowani operatorzy mogą sģuŋyæ do róŋnych celów w zrobotyzowanym systemie wizyjnym. Jedną z funkcji jest wyeliminowanie korespondencji, niepoŋądanego stanu, który moŋe wystąpiæ w lornetkowym obrazie maszynowym, gdy wzory mylą poczucie gģębi maszyny. Operatory zainteresowania zapewniają punkty odniesienia niezaleŋnie od ogólnych wzorców. Inną funkcją operatora zainteresowania jest ustalanie granic, jak w przypadku wykrywania krawędzi. Takie algorytmy teŋ są przydatne w systemach wizyjnych, które obejmują lokalne skupianie się na cechach.
INTERFEJS
Interfejs to urządzenie, które przenosi dane między komputerem a jego urządzeniami peryferyjnymi lub między komputerem a czģowiekiem. Interfejs skģada się zarówno ze sprzętu, jak i oprogramowania. Termin ten jest równieŋ uŋywany jako czasownik; kiedy ģączysz ze sobą dwa urządzenia i czynisz je kompatybilnymi, ģączysz je. Zaģóŋmy, ŋe chcesz uŋywaæ komputera do sterowania robotem. Musisz upewniæ się, ŋe będą one wspóģpracowaæ. Oznacza to, ŋe musisz poģączyæ komputer z robotem. Wymaga to odpowiedniego noķnika do przesyģania danych (poģączenie kablowe lub bezprzewodowe), uŋycia odpowiedniego typu portu danych (równolegģego lub szeregowego) oraz wģaķciwego programu do sterowania robotem. W systemie robotycznym wszystkie ruchome częķci są w rzeczywistoķci urządzeniami peryferyjnymi kontrolera, w taki sam sposób, jak drukarki, skanery i napędy zewnętrzne są urządzeniami peryferyjnymi w osobistym systemie komputerowym.
INTERPOLACJA
Kiedy występuje luka w danych, ale dane są dostępne po obu stronach luki, oszacowanie wartoķci w luce moŋe czasem byæ dokonane za pomocą procesu matematycznego zwanego interpolacją. Ryc. 1 pokazuje gģadką krzywą z przerwą w wykreķlonych lub znanych wartoķciach.
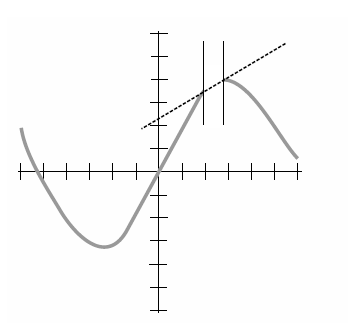
Najprostszym sposobem interpolacji wartoķci w nieznanym obszarze jest poģączenie "lužnych koņców" krzywej linią prostą (pokazaną w tym przykģadzie linią przerywaną). Nazywa się to interpolacją liniową. Bardziej wyrafinowane schematy próbują uzyskaæ funkcję, która definiuje krzywą w pobliŋu szczeliny, a następnie wypeģniæ nieznane wartoķci na podstawie tej funkcji. Proste metody interpolacji niekoniecznie dziaģają w przypadku zģoŋonych przebiegów, zwģaszcza gdy przerwa jest duŋa
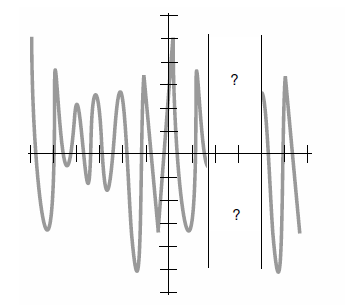
O ile nie moŋna ustaliæ wzoru dla krzywej, umoŋliwiając w ten sposób uzyskanie funkcji matematycznej, która reprezentuje krzywą, nie moŋna ustaliæ dokģadnych punktów w szczelinie. Nawet jeķli wydaje się, ŋe funkcja zostaģa znaleziona aby zdefiniowaæ krzywą zģoŋoną lub nieregularną, interpolacja moŋe nie dziaģaæ, poniewaŋ pochodna funkcja opiera się na niewystarczającym próbkowaniu danych
Szczęka to wyspecjalizowany chwytak robota, skģadający się z pojedynczych częķci, które moŋe zacisnąæ się, aby przytrzymaæ obiekt, i otworzyæ, aby go uwolniæ. Nazwa urządzenia pochodzi od jego funkcjonalnego podobieņstwa do ludzkiej szczęki lub szczęki róŋnych zwierząt i owadów. Typowa robotyczna szczęka ma dwie częķci, które są poģączone zawiasowo na wspólnym koņcu. Jedna lub obie częķci mogą się poruszaæ względem ramienia robota. Niektóre szczęki mają trzy lub cztery ruchome częķci, które ģączą się, aby chwyciæ przedmiot i rozszerzyæ go i uwolniæ to.
JOIN
Termin join jest uŋywany w odniesieniu do funkcji programowania sterownika, która pozwala robotowi wznowiæ zadanie w miejscu, w którym zostaģo przerwane, w przypadku zakģócenia, takiego jak awaria zasilania lub wypadek. Ta funkcja jest podobna, choæ ogólnie bardziej wyrafinowana, niŋ zdolnoķæ drukarki komputerowej do rozpoczęcia drukowania na stronie, na której zostaģa przerwana, jeķli taca papieru opróŋni się w trakcie zadania i musi zostaæ ponownie napeģniona. Skuteczny program ģączenia wymaga nieulotnej pamięci, takiej jak pamięæ o dostępie swobodnym (RAM) z podtrzymaniem bateryjnym, do przechowywania informacji dotyczących dziaģaņ w zadaniu, które zostaģy juŋ wykonane, i tych, które jeszcze nie zostaģy wykonane. Chwila obecna lub chwila w czasie musi byæ wyražnie znana sterownikowi robota i aktualizowana w częstych odstępach czasu (na przykģad uģamek sekundy). Informacje te są stale przechowywane i odķwieŋane w nieulotnej pamięci RAM. W przypadku przerwy w dostawie prądu, wypadku lub innego zdarzenia losowego robot jest zaprogramowany do przejķcia przez okreķloną sekwencję w celu ustalenia, gdzie i jak zacząæ od nowa, na podstawie danych przechowywanych w pamięci RAM. Wraz z sekwencją wczeķniej wykonanych ruchów i ruchami, które naleŋy wykonaæ w ramach danego zadania, mogą byæ wymagane dodatkowe informacje, takie jak to, czy fizyczna lokalizacja lub orientacja robota ulegģa zmianie w ķrodowisku pracy
JOINT-FORCE SENSING [WYKRYWANIE SIĢY POĢĄCZENIA]
Wykrywanie siģy poģączenia zapobiega wywieraniu przez zģącze robota zbyt duŋej siģy. Uŋywany jest system informacji zwrotnej. Czujnik dziaģa, wykrywając opór napotkany przez ramię robota. Wraz ze wzrostem przyģoŋonej siģy roķnie równieŋ opór. Czujnik jest zaprogramowany tak, aby zmniejszaģ lub zatrzymywaģ poģączenie, jeķli zostanie przekroczona ustawiona wartoķæ rezystancji.
JOINT-INTERPOLATED MOTION [RUCH Z INTERPOLACJĄ POĢĄCZENIA]
W ramieniu robota mającym więcej niŋ jedno zģącze, najbardziej wydajny tryb operacjia nazywana jest ruchem z interpolacją poģączenia. W tym schemacie poģączenia poruszają się w taki sposób, ŋe efektor koņcowy osiąga wymagany punkt dokģadnie w momencie, gdy kaŋde ze stawów wykonaģo przypisany ruch. Aby wielopunktowe ramię robota ustawiģo efektor koņcowy w wyznaczonym miejscu, kaŋde zģącze musi obróciæ się o okreķlony kąt. (W przypadku niektórych poģączeņ kąt ten moŋe wynosiæ zero, co oznacza brak obrotu.) Do wyznaczonego poģoŋenia moŋna dotrzeæ za pomocą dowolnej sekwencji zdarzeņ, tak ŋe kaŋde zģącze obraca się o przypisany kąt; ten sam punkt koņcowy spowoduje, czy poģączenia poruszają się w tym samym czasie. Na przykģad kaŋde zģącze moŋe obracaæ się o przypisany kąt, podczas gdy wszystkie pozostaģe pozostają nieruchome, ale jest to proces czasochģonny i nieefektywny. Najszybsze i najbardziej wydajne wyniki uzyskuje się, gdy wszystkie poģączenia zaczynają się obracaæ w okreķlonym momencie natychmiast w czasie t 0 i wszystkie przestają się obracaæ w pewnym momencie t1, czyli (t1 - t0) póžniej niŋ t0. Zaģóŋmy, ŋe ramię robota wykorzystujące geometrię przegubową ma trzy zģącza, które obracają się o kąty X = 39 stopni, Y = 75 stopni i Z = 51 stopni, jak pokazano na ilustracji. Zaģóŋmy, ŋe efektor koņcowy jest zaprogramowany tak, aby osiągaģ punkt koņcowy dokģadnie 3 sekundy po tym, jak poģączenia zaczną się obracaæ. Jeķli zģącza obracają się z pokazanymi prędkoķciami kątowymi (odpowiednio 13, 15 i 17 stopni na sekundę), efektor koņcowy dociera do wyznaczonego punktu zatrzymania dokģadnie wtedy, gdy kaŋde zģącze obraca się pod wymaganym kątem. To jest przykģad ruchu z interpolacją poģączoną.
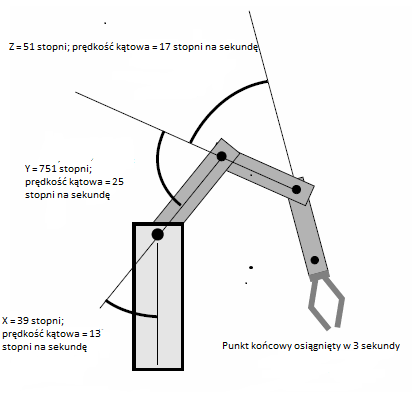
JOINT PARAMETERS [WSPÓLNE PARAMETRY]
Wspólnymi parametrami ramienia robota lub efektora koņcowego są wartoķci skalarne, zwykle mierzone w liniowych jednostkach przemieszczenia i jednostkach kątowych, z których wszystkie razem okreķlają zestaw wszystkich moŋliwych pozycji, jakie moŋe osiągnąæ urządzenie. Zaģóŋmy na przykģad, ŋe ramię robota ma trzy zģącza, z których kaŋde moŋe obracaæ się o 180 °, wraz z obrotową podstawą, która moŋe obracaæ się o 360 °. To ramię robota ma cztery parametry poģączenia, przy zaģoŋeniu, ŋe podstawę obrotową uwaŋa się za zģącze.
JOYSTICK [DRĄŊEK STEROWY]
Joystick to urządzenie sterujące zdolne do poruszania się w dwóch lub trzech wymiarach. Urządzenie skģada się z ruchomej džwigni lub uchwytu oraz ģoŋyska kulkowego w skrzynce kontrolnej. Kij jest poruszany ręcznie. Joystick ma swoją nazwę od podobieņstwa do joysticka w samolocie. Niektóre joysticki moŋna obracaæ zgodnie z ruchem wskazówek zegara i przeciwnie do ruchu wskazówek zegara, oprócz zwykģych dwóch wspóģrzędnych, umoŋliwiając sterowanie w trzech wymiarach, oznaczonych x, y i z. Ilustracja pokazuje przykģad takiego urządzenia. Przeģącznik przyciskowy moŋe byæ umieszczony na górnym koņcu ruchomej džwigni, umoŋliwiając ograniczoną kontrolę w czwartym wymiarze (w).
Joysticki są uŋywane w grach komputerowych do wprowadzania wspóģrzędnych w komputerze i do zdalnego sterowania robotami. Wiele z nich jest bardziej wyrafinowanych niŋ pokazane tutaj podstawowe urządzenie; niektóre wymagają chwytania jedną lub obiema rękami.
JUNGA TEORIA ĶWIATA
Ciekawą motywacją do badaņ nad sztuczną inteligencją (AI) jest teoria ķwiata Junga. Zgodnie z tą hipotezą istoty ludzkie popeģniają te same bģędy w kaŋdym pokoleniu. Wydaje się, ŋe ludzie nie mogą uczyæ się na podstawie historii. Ludzkoķæ jako jednostka kolektywna wydaje się nie byæ w stanie przewidzieæ ani nie przejmowaæ się potencjalnymi konsekwencjami rzeczy, które robią. To tak, jakby rasa ludzka byģa ķlepa na czas. "Historia się powtarza". Teorię tę wykazano wiele razy. Ludzie wciąŋ toczą wojny z tych samych powodów: wojny rzadko rozwiązują problemy, choæ w niektórych przypadkach wydaje się, ŋe nie ma innego wyjķcia niŋ pójķæ na wojnę. Dziaģalnoķæ czģowieka staje się coraz bardziej destrukcyjna dla ekosystemu Ziemi. Najbardziej pesymistyczne interpretacje teorii ķwiata Junga sugerują, ŋe ludzkoķæ jest skazana na samozatarcie. Co ludzkoķæ moŋe zrobiæ, aby powstrzymaæ samobójcze bģędne koģo? Wedģug badacza Charlesa Lechta jedna odpowiedž moŋe polegaæ na rozwoju sztucznej inteligencji do tego stopnia, ŋe maszyny zyskują większą inteligencję niŋ ludzie. Byæ moŋe genialny komputer lub system maszyn moŋe pomóc ludzkoķci w kontrolowaniu jej przeznaczenia, tak aby ludzie nie musieli przeŋywaæ tych samych starych klęsk. Wielu badaczy wątpi, ŋe maszyny staną się lub mogą staæ się mądrzejsze od ludzi, ale argumentowano, ŋe AI moŋna i naleŋy wykorzystywaæ do pomóc ludzkoķci znaležæ rozwiązania trudnych problemów spoģecznych.
Bģąd kinematyczny odnosi się do niedokģadnoķci ruchu robota, która zachodzi niezaleŋnie od siģy i masy. Ostateczny efekt bģędu kinematycznego moŋna zmierzyæ w wartoķciach bezwzględnych, takich jak liniowe jednostki przemieszczenia lub stopnie ģuku. Ostateczny efekt moŋna równieŋ zmierzyæ jako procent caģkowitego ruchu. Jako przykģad zaģóŋmy, ŋe robot mobilny jest zaprogramowany do dziaģania z prędkoķcią 1.500 m / s przy azymutalnym ģoŋysku 90,00 ° (na wschód) na pģaskiej powierzchni. Jeķli robot napotka nachylenie w górę, moŋna oczekiwaæ, ŋe prędkoķæ do przodu nieznacznie spadnie. Natomiast w przypadku napotkania zbocza robota moŋna oczekiwaæ, ŋe prędkoķæ jazdy wzroķnie. Jeķli powierzchnia przechyla się w lewo lub w prawo, moŋna oczekiwaæ, ŋe kierunek ruchu odpowiednio się zmieni. W idealnym scenariuszu nieregularnoķæ terenu nie wpģynie na prędkoķæ ani kierunek maszyny; bģąd kinematyczny wynosiģby zatem zero. Bģędy kinematyczne, jeķli występują trwale w danym sensie i przez pewien czas, mogą powodowaæ akumulację przesunięcia lub poģoŋenia robota po zakoņczeniu zadania.
K-LINE PROGRAMOWANIE
Programowanie K-line to metoda, dzięki której inteligentny robot moŋe się uczyæ jak wykonywaæ pracę, aby w przyszģoķci ģatwiej byģo wykonywaæ tę samą lub podobną pracę. Zaģóŋmy, ŋe masz osobistego robota, którego uŋywasz do prac domowych w domu. Podgrzewacz wody psuje się i instruujesz robota, aby go naprawiæ. Robot musi uŋyæ pewnych narzędzi do wykonania naprawy. Przy pierwszej naprawie podgrzewacza robot musi znaležæ narzędzia metodą prób i bģędów. Koduje kaŋde narzędzie w swojej pamięci, byæ moŋe wedģug ksztaģtu. Koduje równieŋ sekwencję, w której narzędzia są uŋywane do naprawy podgrzewacza wody. Lista uŋywanych wczeķniej narzędzi i kolejnoķæ ich uŋywania nazywa się linią K. Następnym razem, gdy podgrzewacz wody wymaga naprawy, robot moŋe odwoģaæ się do linii K, aby usprawniæ proces wykonywania zadania. Oczywiķcie istnieje wiele róŋnych rzeczy, które mogą pójķæ nie tak z podgrzewaczem wody. Za drugim razem, gdy podgrzewacz wody zepsuje się, linia K dla pierwszej naprawy moŋe nie dziaģaæ. W takim przypadku robot musi udoskonaliæ swoją wiedzę, opracowując drugą linię K dla nowego problemu. Z czasem robot nauczy się kilku róŋnych schematów mocowania podgrzewacza wody, z których kaŋdy będzie dostosowany do konkretnego problemu. Ilustracja jest schematem blokowym pokazującym, jak moŋna opracowaæ repertuar linii K, aby robot uczyģ się przez doķwiadczenie.
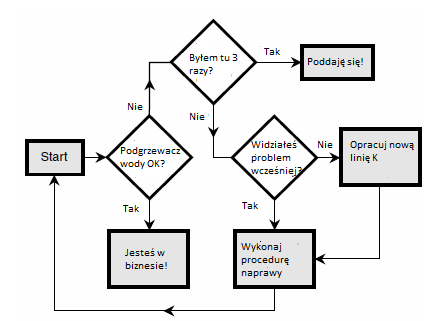
KLUDGE
Surowe, bezuŋyteczne lub raŋąco nieefektywne urządzenie lub proces nazywa się kludge (wymawiane jako "kloodge"). Termin ten jest równieŋ uŋywany w odniesieniu do tymczasowej poprawki lub poprawki. Moŋesz powiedzieæ: "To urządzenie jest robotem kludge" lub "To kludge, które sprawi, ŋe program będzie dziaģaģ pģynniej". Kludges są często przydatne, poniewaŋ mogą przetestowaæ pomysģ bez większych problemów i kosztów. Czasami jednak okreķlenie urządzenia lub schematu jako "kludge" jest przeprosinami (w przypadku wģasnej pracy) lub dobroduszną zniewagą (w przypadku pracy innej osoby). Większoķæ doķwiadczonych inŋynierów od czasu do czasu buduje lub pisze urządzenia lub programy kludge. Kaŋdego roku Uniwersytet Purdue organizuje konkurs "Rube Goldberg" dla studentów, aby zbudowaæ lub zaprojektowaæ absurdalnie nieefektywne maszyny i oprogramowanie komputerowe. Konkurs jest sponsorowany przez Theta Tau, wspólnotę inŋynieryjną. W koņcu prawie kaŋdy inŋynier staje się ekspertem w dziedzinie kludge. Ale próba sprzedaŋy kludge jako produktu gotowego jest bģędem przemysģowym - chyba ŋe oczywiķcie chodzi o ŋart.
KNOWLEDGE [WIEDZA, UMIEJĘTNOĶCI]
Termin wiedza odnosi się do danych przechowywanych w systemie komputerowym, sterowniku robota lub ludzkim umyķle. Termin ten odnosi się równieŋ do tego, jak dobrze mózg, elektroniczny lub biologiczny, wykorzystuje dane, które posiada. Ludzie, indywidualnie i zbiorowo, mają wiedzę, która zmienia się z pokolenia na pokolenie. Niektórzy badacze sugerują, ŋe komputery wraz z elektronicznymi, optycznymi i magnetycznymi noķnikami danych wyeliminują utratę lub degradację wiedzy ludzkiej w przyszģych pokoleniach. To da ludzkoķci stale powiększający się magazyn nieķmiertelnej wiedzy. W systemach eksperckich inŋynierowie komputerowi definiują nabywanie wiedzy jako proces, w którym maszyny uzyskują dane. Ogólnie rzecz biorąc, zgadza się, ŋe caģa wiedza komputerowa musi pochodziæ od ludzi, chociaŋ kilku naukowców uwaŋa, ŋe maszyny mogą generowaæ oryginalną, prawdziwą wiedzę. Chociaŋ istnieją kontrowersje dotyczące zdolnoķci maszyn do tworzenia oryginalnej wiedzy, ostatecznie udowodniono, ŋe komputery wysokiego poziomu mogą uczyæ się na swoich bģędach. To nie jest oryginalna myķl, ale wywodzi się z istniejącej wiedzy poprzez programowanie. Zdolnoķæ maszyny do lepszego wykorzystania danych nazywa się wiedzą heurystyczną. Komputery mogą przechowywaæ i przetwarzaæ informacje w sposób, który ludzie uwaŋają za trudny lub niemoŋliwy. Dobrym przykģadem jest dodanie szeregu 5 milionów liczb. Istnieją jednak problemy, które ludzie mogą rozwiązaæ, których maszyna nie moŋe i byæ moŋe nigdy nie będzie w stanie zrozumieæ. Jednym z przykģadów jest regulacja iloķci leków potrzebnych do znieczulenia pacjenta w szpitalu podczas operacji, bez wyrządzania mu szkody.
Ladar to akronim oznaczający detekcję laserową i okreķlanie odlegģoķci. Jest równieŋ znany jako radar laserowy lub lidar (skrót od wykrywania ķwiatģa i okreķlania odlegģoķci). W robotyce system ladarowy wykorzystuje strumieņ ķwiatģa widzialnego lub energii w podczerwieni (IR) zamiast fal radiowych (jak w radarach) lub fal akustycznych (jak w sonarach) do wykonywania wykrywania zasięgu i kreķlenia otoczenia. Urządzenie dziaģa, mierząc czas, w którym wiązka lasera dociera do punktu docelowego, odbija się od niego, a następnie propaguje z powrotem do punktu transmisji. Podstawowym atutem ladaru w porównaniu z innymi metodami ustalania odlegģoķci jest fakt, ŋe wiązka laserowa jest wyjątkowo wąska. Zapewnia to znacznie lepszą rozdzielczoķæ kierunkową w porównaniu ze schematami radarów i sonarów, których wiązki nie mogą byæ skupionymi z taką precyzją. Ladar ma ograniczenia. Nie moŋe dobrze dziaģaæ przez mgģę lub opady, podobnie jak radar. Niektóre typy obiektów, takie jak zwierciadģa zorientowane ukoķnie, nie zwracają energii ladaru i nie wytwarzają echa. Wysokopoziomowy system ladarowy skanuje zarówno poziomo, jak i pionowo, tworząc w ten sposób trójwymiarową (3-D) komputerową mapę ķrodowiska. Ten typ systemu jest niezwykle drogi. Mniej wyrafinowane urządzenia ladarowe pracują w jednej pģaszczyžnie, zwykle poziomej, w celu utworzenia dwuwymiarowej (2-D) komputerowej mapy ķrodowiska na okreķlonym poziomie powyŋej podģogi lub pģaskiego podģoŋa.
LADLE GRIPPER [CHWYTAK DO KADZI]
Chwytak do kadzi to zrobotyzowany efektor koņcowy, który moŋe byæ uŋywany do przemieszczania cieczy. Moŋe byæ równieŋ uŋywany do przenoszenia proszków i ŋwiru. Nazwa urządzenia pochodzi od czerpakowego ksztaģtu fizycznego i sposobu, w jaki dziaģa. Efektor koņcowy moŋe mieæ ksztaģt póģkuli, pudeģka lub dowolnego innego pojemnika, który moŋe pomieķciæ ciecze. Chwytaki do kadzi są uŋywane w przemyķle do przenoszenia stopionych metali z kadzi do form. Mogą byæ równieŋ uŋywane do obsģugi niektórych rodzajów materiaģów niebezpiecznych. Chwytaki kadzi wymagają do dziaģania znacznej siģy grawitacji lub przyspieszenia. Z tego powodu na ogóģ nie nadają się do uŋytku w przestrzeni kosmicznej. Ponadto przenoszony materiaģ musi mieæ znacznie większą gęstoķæ niŋ medium, w którym odbywa się ruch. Na przykģad chwytak do kadzi moŋe byæ uŋywany do przenoszenia etanolu z jednego pojemnika do drugiego w powietrzu na poziomie morza, ale nie pod wodą.
LANDMARK [PUNKT ORIENTACYJNY]
W robotyce punkt orientacyjny jest specyficzną cechą ķrodowiska pracy robota, zauwaŋalną ze względu na jego przydatnoķæ w nawigacji i ustalaniu odlegģoķci. Punkty orientacyjne są zazwyczaj ustalane względem czasu. Przykģady obejmują biurko, drzwi lub zestaw obiektów, takich jak budynki lub znaki. Punkty orientacyjne mogą byæ naturalne lub sztuczne. Czasami są one celowo ustawione w celu pomocy robotom w nawigacji w regionie. Wyimaginowana linia między dwoma punktami orientacyjnymi zwana granicą pary punktów orientacyjnych. O ile nie występują przeszkody lub zagroŋenia, granice par punktów orientacyjnych są zwykle proste. W zģoŋonym ķrodowisku pracy granice par punktów orientacyjnych tworzą krawędzie trójkątów zwanych regionami orientacji. Przykģad pokazano na ilustracji.
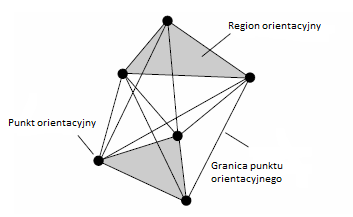
LASEROWYCH DANYH TRANSMISJA
Wiązki laserowe moŋna modulowaæ w celu przekazywania informacji, w taki sam sposób jak fale radiowe. Laserowa transmisja danych umoŋliwia przesģanie kilku sygnaģów szerokopasmowych lub wielu sygnaģów wąskopasmowych za pomocą pojedynczej wiązki ķwiatģa. Ta metoda transmisji danych jest stosowana w niektórych mobilnych systemach robotycznych. Nadajnik komunikacji laserowej ma procesor lub wzmacniacz sygnaģu, modulator i laser (górna częķæ ilustracji). Odbiornik wykorzystuje fotokomórkę, wzmacniacz i procesor sygnaģu (dolna częķæ ilustracji). Moŋna przesyģaæ dowolne dane, w tym sygnaģy gģosowe, telewizyjne i cyfrowe. Systemy komunikacji laserowej mogą byæ liniowe lub ķwiatģowodowe. W systemie widocznoķci wiązka przemieszcza się w linii prostej przez przestrzeņ lub czyste powietrze. Poniewaŋ wiązki laserowe pozostają wąskie na duŋe odlegģoķci, moŋliwa jest komunikacja na duŋe odlegģoķci. Jednak ten schemat nie dziaģa dobrze przez chmury, mgģę, deszcz, ķnieg lub inne przeszkody. Ustawienie lasera i fotodetektora musi byæ dokģadne. W ķwiatģowodowym systemie komunikacji laserowej wiązka jest prowadzona przez wģókno szklane lub z tworzywa sztucznego. Jest to podobne do komunikacji przewodowej lub kablowej, ale z duŋo większą wszechstronnoķcią. Ukģady optyczne nie są podatne na dziaģanie zakģóceņ elektromagnetycznych (EMI), podobnie jak niektóre przewody i sieci kablowe. Systemy ķwiatģowodowe dobrze nadają się do sterowania robotami, szczególnie w nieprzyjaznych ķrodowiskach, takich jak gģębokie morze.
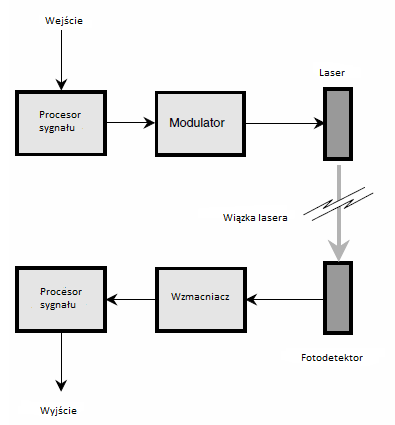
LINIOWE PROGRAMOWANIE
Programowanie liniowe to proces optymalizacji dwóch lub więcej zmiennych, które zmieniają się niezaleŋnie od siebie. Prosty przykģad programowania liniowego pokazano na ilustracji. Dwie zmienne to wspóģrzędne poģoŋenia x i y w pģaszczyžnie kartezjaņskiej (prostokątnej). Zmienne reprezentują pozycje dwóch robotów poruszających się po liniach prostych w obrębie obszaru roboczego. Ķcieŋka robota A jest pokazana linią ciągģą; ķcieŋka robota B jest pokazana linią przerywaną. Zaģóŋmy, ŋe robot A porusza się z prędkoķcią 1.150 m / s, a robot B porusza się z prędkoķcią 0,755 m / s. Punkty początkowe są oznaczone grubymi kropkami. Programowanie liniowe moŋe odpowiedzieæ na następujące pytania:
• Jak dģugo po uruchomieniu roboty będą najbliŋej siebie?
• Czy roboty zderzą się, chyba ŋe zmienią kurs lub prędkoķæ?
• Jakie będą wspóģrzędne robota A w momencie najbliŋszego podejķcia?
• Jakie będą wspóģrzędne robota B w czasie najbliŋszego podejķcia?
Komputery moŋna zaprogramowaæ w celu szybkiego i ģatwego rozwiązania tych problemów. Inteligentne roboty rozwiązują takie problemy w razie potrzeby, bez nadzoru ze strony operatora. Obliczenia te są waŋne, jeķli w maģym obszarze roboczym znajduje się wiele robotów, a robotom brakuje wyrafinowanych czujników unikania kolizji.
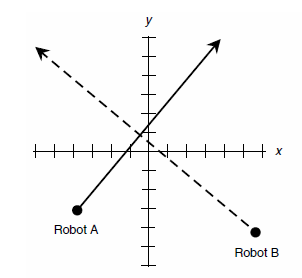
LOAD / HAUL / DUMP
Load / Haul / Dump, w skrócie LHD, jest rodzajem robota mobilnego stosowanego w górnictwie i budownictwie. Robi dokģadnie to, co sugeruje jego nazwa. Z pomocą operatora LHD ģadują ģadunek, przewoŋą go z jednego miejsca do drugiego i zrzucają w wyznaczone miejsce. W górnictwie LHD mają ģatwiejszy czas niŋ w budownictwie ogólnym. Geometria kopalni jest ģatwo zaprogramowana w sterowniku robota; ukģad zmienia się powoli. Ponowne programowanie nie musi byæ często wykonywane. Jednak w budownictwie krajobraz jest bardziej skomplikowany i zmienia się szybko w miarę postępu prac. Dlatego mapy komputerowe muszą byæ często aktualizowane. W górnictwie wszystkie ģadunki są zwykle takie same pod względem masy i objętoķci, poniewaŋ kaŋdy ģadunek skģada się z okreķlonej iloķci jednej substancji, takiej jak węgiel lub ruda ŋelaza. Na budowie, charakter, a co za tym idzie cięŋar i objętoķæ ģadunku moŋe się róŋniæ. Pojazdy LHD uŋywają róŋnych metod nawigacji, w tym sygnaģów nawigacyjnych, map komputerowych, czujników poģoŋenia i systemów wizyjnych. LHD mogą byæ autonomiczne, chociaŋ korzystanie z jednego kontrolera dla wielu robotów ma zalety.
LOKALNEGO SKUPIENIA FUNKCJA
W robotycznym systemie wizyjnym zwykle nie jest konieczne uŋycie caģego obrazu do wykonania funkcji. Często potrzebna jest tylko jedna funkcja lub niewielki region na obrazie. Aby zminimalizowaæ miejsce w pamięci i zoptymalizowaæ prędkoķæ, moŋna uŋyæ funkcji lokalnego skupienia. Zaģóŋmy, ŋe robot musi pobraæ szczypce z przybornika. To narzędzie ma charakterystyczny ksztaģt przechowywany w pamięci. Moŋna zapisaæ kilka róŋnych obrazów, reprezentujących szczypce widziane pod róŋnymi kątami. System wizyjny szybko skanuje przybornik, aŋ znajdzie obraz, który pasuje do jednego z jego obrazów dla szczypiec. To oszczędza czas w porównaniu z metodą prób i bģędów, w których robot podnosi narzędzie po narzędziu, aŋ znajdzie szczypce. System ludzkiego oka / mózgu wykorzystuje lokalne skupienie bez ķwiadomego wysiģku. Jeķli ktoķ jedzie w lesie i widzi znak "Uwaŋaj na zwierzęta przechodzące przez jezdnię", kierowca będzie szukaģ zwierząt na jezdni lub w jej pobliŋu. System ludzkiego oka / mózgu moŋe natychmiast odróŋniæ animację od obiektów nieoŋywionych. Sterownik robota z wyrafinowanym lokalnym ukierunkowaniem funkcji, w poģączeniu ze sztuczną inteligencją (AI), moŋe zrobiæ to samo.
LOGIKA
Logika moŋe odnosiæ się do jednej z dwóch rzeczy w elektronice, informatyce i sztucznej inteligencji (AI). Algebra boolowska jest reprezentacją instrukcji jako symboli, wraz z operacjami, generującymi równania. Ta forma logiki jest waŋna w projektowaniu ukģadów cyfrowych, w tym komputerów. Algebra boolowska jest formą logiki dedukcyjnej, poniewaŋ wnioski są wyprowadzane lub wywnioskowane w skoņczonej liczbie kroków. W indukcji matematycznej udowodniono, ŋe stwierdzenie jest prawdziwe dla sekwencji przypadków. Po pierwsze, stwierdzenie to potwierdzi się dedukcyjnie w jednym przypadku. Następnie udowodniono, ŋe jeķli stwierdzenie jest prawdziwe w przypadku dowolnego przypadku, jest prawdziwe w przypadku następnego przypadku w sekwencji. To implikuje prawdę dla caģej sekwencji, nawet jeķli sekwencja jest nieskoņczona. Matematycy uwaŋają to za caģkowicie rygorystyczne i dopuszczalne. W celu dokģadnego omówienia logiki dedukcyjnej i indukcji matematycznej zaleca się tekst o logice symbolicznej.
Logika trójstronna dopuszcza stan neutralny, ani prawdziwy, ani faģszywy, oprócz zwykģych stanów prawda / faģsz (wysoki / niski). Te trzy wartoķci są reprezentowane przez logikę -1 (faģsz), 0 (neutralny) i +1 (prawda). Ukģady trójstronne mogą byæ ģatwo reprezentowane w obwodach elektronicznych za pomocą dodatnich, zerowych i ujemnych prądów lub napięæ. W logice rozmytej wartoķci obejmują ciągģy zakres od "caģkowicie faģszywego", przez neutralny, do "caģkowicie prawdziwego". Logika rozmyta dobrze nadaje się do kontroli niektórych procesów. Jego zastosowanie stanie się bardziej rozpowszechnione w miarę postępu technologii AI. Logika rozmyta moŋe byæ reprezentowana cyfrowo w dyskretnych krokach; liczba kroków to zwykle potęga 2.
LOGICZNA BRAMKA
Wszystkie cyfrowe urządzenia i systemy binarne wykorzystują przeģączniki elektroniczne, które wykonują róŋne funkcje boolowskie. Przeģącznik tego typu nazywa się bramką logiczną. Zwykle cyfra binarna 1 oznacza "prawda" i jest reprezentowana przez okoģo +5 V. Cyfra binarna 0 oznacza "faģsz" i jest reprezentowana przez napięcie bliskie 0 V. Ten schemat jest znany jako logika dodatnia. Istnieją inne formy logiczne, z których najczęstszą jest logika ujemna (w której cyfra 1 jest reprezentowana przez bardziej ujemne napięcie niŋ cyfra 0). Pozostaģa częķæ tej dyskusji dotyczy logiki pozytywnej. Falownik, zwany takŋe bramką NOT, ma jedno wejķcie i jedno wyjķcie. Odwraca stan wejķcia. Bramka OR moŋe mieæ dwa lub więcej wejķæ. Jeķli oba lub wszystkie z wejķæ mają wartoķæ 0, wówczas wyjķcie wynosi 0. Jeķli którekolwiek z wejķæ ma wartoķæ 1, wówczas wyjķcie ma wartoķæ 1. I ORAZ bramka moŋe mieæ dwa lub więcej wejķæ. Jeķli oba lub wszystkie wejķcia mają wartoķæ 1, wówczas wyjķcie wynosi 1. W przeciwnym razie wyjķcie wynosi 0. Czasami falownik i bramka OR są poģączone. Powoduje to powstanie bramki NOR. Jeķli falownik i bramka AND są poģączone, wynikiem jest bramka NAND. Ekskluzywna bramka OR, zwana takŋe bramką XOR, ma dwa wejķcia i jedno wyjķcie. Jeķli dwa wejķcia są takie same (oba 1 lub oba 0), wówczas wartoķæ wyjķciowa wynosi 0. Jeķli dwa dane wejķciowe są róŋne, wówczas dane wyjķciowe wynoszą 1. Funkcje bramek logicznych są podsumowane w towarzyszącej tabeli i ich schemat symbole pokazano na ilustracji.
Typ bramy: Liczba wejķæ: Uwagi
INWERTER (NIE): 1: Zmienia stan wejķcia
OR : 2 lub więcej: Wyjķcie wysokie, jeķli jakiekolwiek wejķcia są wysokie, Wyjķcie niskie, jeķli wszystkie wejķcia są niskie
AND : 2 lub więcej: Niska moc wyjķciowa, jeķli jakieķ sygnaģy wejķciowe są niskie, Wysoka moc wyjķciowa, jeķli wszystkie sygnaģy wejķciowe są wysokie
NOR: 2 lub więcej: Niski poziom wyjķciowy, jeķli jakieķ dane wejķciowe są wysokie; ,, Wysoki poziom wyjķciowy, jeķli wszystkie dane wejķciowe są niskie
NAND: 2 lub więcej: Wyjķcie wysokie, jeķli jakieķ wejķcia są niskie, Wyjķcie niskie, jeķli wszystkie wejķcia są wysokie
XOR: 2: Wyjķcie wysokie, jeķli wejķcia róŋnią się, Wyjķcie niskie, jeķli wejķcia są takie same
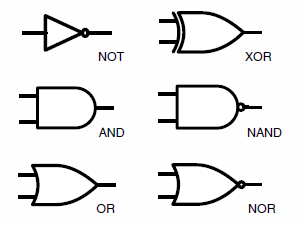
LOG-POLAR TRANSFORMACJA
Podczas mapowania obrazu do uŋycia w zrobotyzowanym systemie wizyjnym czasami pomaga transformacja obrazu z jednego rodzaju ukģadu wspóģrzędnych na inny. W logarytmicznej transformacji biegunowo komputer przeksztaģca obraz o wspóģrzędnych biegunowych w obraz o wspóģrzędnych prostokątnych. Zasada przetwarzania obrazu logarytmiczno-polarnego pokazano na ilustracji. Ukģad biegunowy z wykreķlonymi dwiema ķcieŋkami obiektów jest przedstawiony na górnym wykresie. Prostokątny odpowiednik, z tymi samymi pokazanymi ķcieŋkami, znajduje się na dolnym wykresie. Promieņ biegunowy jest odwzorowany na pionowej prostokątnej osi; kąt biegunowy jest odwzorowany na poziomej prostokątnej osi. Wspóģrzędne promieniowe są nierównomiernie rozmieszczone na mapie biegunowej, ale są jednorodne na mapie prostokątnej. Podczas transformacji brany jest logarytm promienia. Powoduje to peryferyjne znieksztaģcenie obrazu. Rozdzielczoķæ jest zmniejszona dla odlegģych obiektów, ale poprawiona dla pobliskich celów. W robotycznej nawigacji zbliŋenia są zwykle waŋniejsze niŋ odlegģe, więc jest to dobry kompromis. Logarytmiczna transformacja znacznie znieksztaģca wygląd sceny dla ludzi. Komputer nie ma z tym ŋadnych problemów, poniewaŋ kaŋdy punkt na obrazie odpowiada jednemu punktowi w prawdziwej przestrzeni. Oznacza to, ŋe mapowanie punktowe jest korespondencją jeden do jednego. W robotycznych systemach wizyjnych stosuje się kamery telewizyjne, które skanują w prostokątnych wspóģrzędnych, ale zdarzenia w prawdziwej przestrzeni mają charakter lepiej reprezentowany przez wspóģrzędne biegunowe. Logarytmiczna transformacja moŋe zatem zmieniaæ rzeczywiste ruchy i postrzeganie w obrazy, które moŋna skutecznie rozwiązaæ za pomocą zrobotyzowanego systemu wizyjnego.
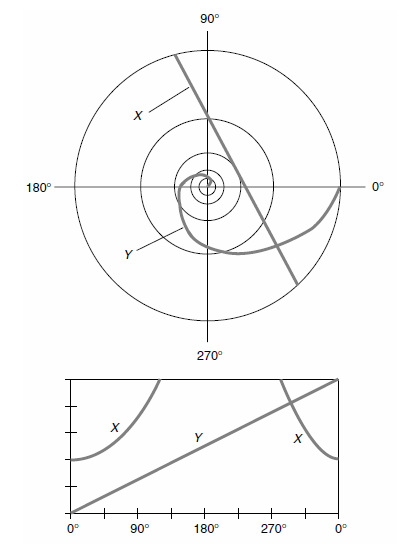
LOOP [PĘTLA]
Pętla jest powtarzającą się sekwencją operacji w programie komputerowym. Liczba powtórzeņ moŋe wynosiæ od dwóch do tysięcy, milionów lub miliardów. Często liczba iteracji zaleŋy od wprowadzanych danych. W niektórych programach pętle znajdują się w pętlach. Nazywa się to zagnieŋdŋaniem pętli. Pętle są przydatne w obliczeniach matematycznych, które obejmują powtarzalne operacje. Do czasu opracowania komputerów wielu takich problemów nie moŋna byģo rozwiązaæ. Problemy nie wiązaģy się z ezoterycznymi zasadami, ale tryliony na tryliony kroków zajęģyby jednej osobie, nawet wyposaŋonej w potęŋny kalkulator (lub liczydģo), więcej niŋ caģe ŋycie. Czasami popeģniane są bģędy w programowaniu i komputer przechodzi przez pętlę, nie osiągając stanu, w którym moŋe wyjķæ z pętli. Nazywa się to pętlą nieskoņczoną lub nieskoņczoną. Zawsze powoduje to, ŋe program nie moŋe dojķæ do satysfakcjonującego zakoņczenia. W skrajnych przypadkach moŋe to spowodowaæ awarię komputera. W kaŋdym systemie wykorzystującym sprzęŋenie zwrotne ķcieŋka sygnaģu sprzęŋenia zwrotnego nazywana jest pętlą. Termin "pętla" moŋe równieŋ odnosiæ się do graficznego przedstawienia dziaģania systemu wykorzystującego sprzęŋenie zwrotne.
LUDDITE [TECHNOFOB]
Za kaŋdym razem, gdy pojawia się nowa waŋna innowacja technologiczna, niektórzy ludzie obawiają się, ŋe stracą pracę. Utrata pracy moŋe wystąpiæ z co najmniej dwóch powodów. Po pierwsze, większa efektywnoķæ zmniejsza liczbę osób potrzebnych do funkcjonowania korporacji lub agencji. Po drugie, ludzcy pracownicy byli czasami zastępowani maszynami, poniewaŋ nie chorują, nie robią przerw na kawę i nie wymagają wakacji. Ludzie, którzy z jakiegokolwiek powodu mają przesadny lęk przed technologią, nazywani są technofobami. Podczas rewolucji przemysģowej w Anglii technofobowie szaleje i niszczą nowy sprzęt, który, jak obawiali się, odbierze im pracę. Ich przywódcą byģ czģowiek o imieniu Ned Ludd, więc ludzie ci stali się znani jako Luddyci. Robotyzacja nie wywoģaģa reakcji typu Luddite w dniach ostatnich w Stanach Zjednoczonych, Japonii lub Europie. Przyczyny tego nie są caģkowicie znane. Niektórzy robotyķci sugerują, ŋe brak duŋego ruchu luddyjskiego wynika dziķ z faktu, ŋe standard ŋycia jest obecnie wyŋszy niŋ w czasach Neda Ludda. Zgodnie z wszelkimi wskazaniami spoģeczeņstwo jest zaleŋne od komputerów, robotów i innych zaawansowanych technicznie urządzeņ, a wszyscy - nawet technofobowie - wiedzą, ŋe zniszczenie tych maszyn wyrządziģoby więcej szkody niŋ poŋytku.
Komputer nie dziaģa ze sģowami ani nawet ze znanymi liczbami o podstawowie 10. Zamiast tego maszyna uŋywa kombinacji zer i jedynek. Są to dwa stany binarne, reprezentowane równieŋ przez on / off, high / low lub true / false. Zapisane dane w języku maszynowym wyglądają jak ciąg zer i jedynek, na przykģad 0110100100. Moŋna to przedstawiæ graficznie za pomocą wykresu, jak pokazano na ilustracji. Kiedy operator komputera pisze program lub osoba wydaje polecenie kontrolerowi robota, odbywa się to w języku wysokiego poziomu. Musi to zostaæ przekonwertowane na język maszynowy komputera. Dane wyjķciowe komputera są równieŋ tģumaczone z języka maszynowego na dowolny język wysokiego poziomu uŋywany przez programistę lub operatora.
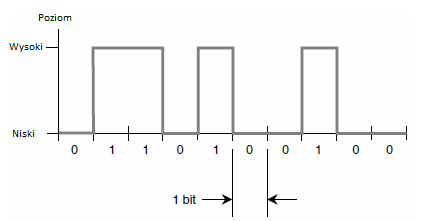
MACHINING [OBRÓBKA]
W robotyce przemysģowej obróbka to modyfikacja częķci podczas montaŋu. Przykģadami obróbki są wiercenie, usuwanie zadziorów w wierconych otworach, spawanie, szlifowanie i polerowanie. Na linii montaŋowej wiele identycznych częķci przechodzi szybko przez kaŋdą stację roboczą, a pracownik lub robot wielokrotnie wykonuje te same zadania. Istnieją dwie metody, za pomocą których roboty wykonują obróbkę. Robot moŋe przytrzymaæ narzędzie, gdy częķæ pozostaje nieruchoma, lub robot moŋe przytrzymaæ częķæ, gdy narzędzie pozostaje w poģoŋeniu.
Robot trzyma narzędzie
Ta metoda ma następujące zalety:
o Maģe roboty mogą byæ uŋywane, jeķli narzędzie nie jest cięŋkie.
o Częķci mogą byæ duŋe i cięŋkie, poniewaŋ nie muszą byæ przenoszone robot.
o Robot moŋe się ģatwo regulowaæ w miarę zuŋycia narzędzia.
Robot trzyma częķæ
Zaletą tej metody są:
o Częķæ moŋna przenieķæ do dowolnego z kilku róŋnych narzędzi, bez koniecznoķci zmiany narzędzia na ramieniu robota.
o Narzędzia mogą byæ duŋe i cięŋkie, poniewaŋ nie trzeba ich przenosiæ.
o Narzędzia mogą mieæ masywne, mocne silniki, poniewaŋ robot nie musi ich utrzymywaæ.
Niektóre sytuacje przemysģowe lepiej nadają się do pierwszej metody, podczas gdy niektóre procesy są wykonywane wydajniej przy uŋyciu drugiej metody. Niektóre procesy nie nadają się do obróbki robotycznej. Obejmują one zadania wymagające subiektywnych decyzji. Niektóre produkty prawdopodobnie nigdy nie zostaną wyprodukowane przy uŋyciu robotów, poniewaŋ nie będą opģacalne. Przykģadem jest samochód zbudowany na zamówienie, skģadany częķæ po częķci, a nie na linii montaŋowej.
MACROKNOWLEDGE
Macroknowledge jest terminem uŋywanym w sztucznej inteligencji (AI), co oznacza "wiedzę w szerokim znaczeniu tego sģowa". Przykģadem macroknowledge jest zestaw definicji róŋnych klas istot ŋywych. Dwie gģówne klasy to roķliny i zwierzęta (chociaŋ niektóre formy ŋycia mają cechy wspólne dla obu klas). W klasie zwierząt moŋemy skupiæ się na ciepģokrwistych i zimnokrwistych stworzeniach. Wiedza o ŋywych istotach moŋe zostaæ wykorzystana przez inteligentnego robota do ustalenia, na przykģad, czy dwunoŋny czģowiek zbliŋający się do niego to czģowiek, inny robot czy goryl
MAGNITUDE PROFIL [PROFIL WIELKOĶCI]
Termin profil wielkoķci odnosi się do sposobu, w jaki robot zachowuje się w pobliŋu obiektu będącego przedmiotem zainteresowania. W szczególnoķci termin ten odnosi się do zmiany dģugoķci (wielkoķci) wektora, w zaleŋnoķci od odlegģoķci (promienia) od obiektu będącego przedmiotem zainteresowania. Wielkoķæ wektora moŋe reprezentowaæ poziom wyjķciowy z czujnika zbliŋeniowego lub urządzenia do pomiaru odlegģoķci lub prędkoķæ lub przyspieszenie robota w okreķlonym kierunku w stosunku do obiektu będącego przedmiotem zainteresowania. Na przykģad zaģóŋmy, ŋe robot jest wyposaŋony w czujnik zbliŋeniowy zaprojektowany w celu ostrzegania go, gdy w pobliŋu znajdują się przeszkody. Wyjķcie z czujnika wzrasta wraz ze zmniejszaniem się odlegģoķci między robotem a obiektem. Moŋe to mieæ miejsce w zaleŋnoķci od róŋnych profili wielkoķci. Na ilustracji przedstawiono trzy najczęķciej występujące.
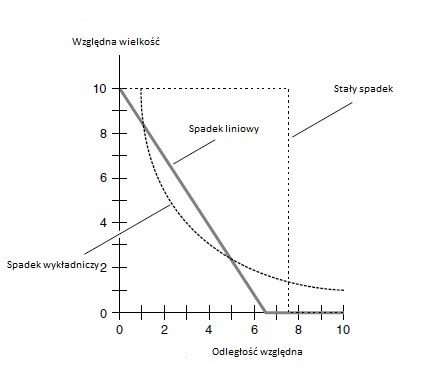
W systemie o profilu staģego zrzutu, który moŋna równieŋ nazwaæ profilem wykrywania progu, sygnaģ wyjķciowy czujnika wynosi zero, dopóki robot nie znajdzie się w okreķlonej odlegģoķci od obiektu (w tym przypadku okoģo 7,5 jednostek, jak pokazano na wykresie Gdy robot znajduje się bliŋej niŋ promieņ krytyczny, sygnaģ wyjķciowy czujnika jest wysoki i staģy i nie zmienia się wraz z odlegģoķcią. W systemie o liniowym profilu odpadania sygnaģ wyjķciowy czujnika wynosi zero, dopóki robot nie znajdzie się w okreķlonej odlegģoķci od obiektu (w tym przypadku okoģo 6,5 jednostek, jak pokazano na wykresie). Gdy robot znajduje się bliŋej niŋ promieņ krytyczny, sygnaģ wyjķciowy czujnika zmienia się w zaleŋnoķci od funkcji prostej o nachyleniu ujemnym, jak pokazano, osiągając maksimum, gdy robot ma zamiar uderzyæ w obiekt. W systemie z wykģadniczym profilem odpadania moc wyjķciowa czujnika zmienia się odwrotnie w zaleŋnoķci od odlegģoķci od promienia. Nie ma nagģych przejķæ ani zagięæ na krzywej, jak w przypadku pozostaģych dwóch schematów profili. Sygnaģ wyjķciowy czujnika spada do zera w znacznej odlegģoķci od obiektu; gdy robot ma zamiar uderzyæ w obiekt, moc wyjķciowa czujnika jest maksymalna.
MANIPULATOR
Manipulator skģada się z ramienia robota i chwytaka lub efektora koņcowego na koņcu ramienia. Termin ten moŋe równieŋ odnosiæ się do zdalnie sterowanego robota.
MEAN TIME BEFORE FAILURE/MEAN TIME BETWEEN FAILURES [OZNACZ CZAS PRZED AWARIĄ / OZNACZ CZAS MIĘDZY AWARIAMI (MTBF)]
Wydajnoķæ robota, komputera lub innej maszyny moŋna okreķliæ na róŋne sposoby. Dwa najczęstsze to ķredni czas przed awarią i ķredni czas między awariami, oba w skrócie MTBF.
Skģadnik
W przypadku pojedynczego elementu, takiego jak ukģad scalony, MTBF (ķredni czas przed awarią) to czas, przez który moŋna oczekiwaæ, aby urządzenie dziaģaģo, zanim ulegnie awarii. Moŋna to stwierdziæ, testując szereg komponentów i uķredniając czas ich dziaģania. Uproszczony przykģad MTBF, obliczony w godzinach na podstawie dziaģania pięciu identycznych, hipotetycznych ŋarówek, pokazano na rysunku. Czas ŋycia jest uķredniany, aby uzyskaæ wynik. Aby wyniki byģy znaczące, liczba próbek musi byæ znacznie większa niŋ pięæ. Testowanie duŋej liczby skģadników, takich jak 1000, a nawet 10.000, eliminuje przypadkowo wypaczone wyniki.
System
W przypadku systemu, takiego jak robot lub komputer, ķredni czas między awariami jest okreķlany na podstawie częstotliwoķci awarii maszyny. Podobnie jak w przypadku metody testowania komponentów, do tego testu najlepiej jest uŋywaæ wielu identycznych maszyn. Warunki testu powinny byæ jak najbardziej realne. Przy duŋym systemie jest wiele komponentów, z których kaŋdy moŋe dziaģaæ nieprawidģowo. Ogólnie rzecz biorąc, im bardziej zģoŋony system, tym krótszy jest MTBF, jeķli wszystkie inne czynniki są utrzymywane na staģym poziomie. Nie oznacza to oczywiķcie, ŋe proste systemy są lepsze niŋ systemy wyrafinowane. Dlatego w przypadku robotów i komputerów MTBF nie jest bezpoķrednim ani ogólnym wskažnikiem jakoķci maszyny.
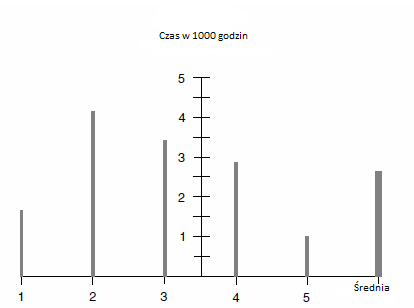
MECHATRONIKA
Mechatronika to termin, który po raz pierwszy pojawiģ się w Japonii. Jest to poģączenie sģów "mechanika" i "elektronika" i odnosi się do technologii stosowanej w robotyce. Termin ma takie samo dosģowne znaczenie jak elektromechanika. W Japonii mechatronika staģa się synonimem potęgi przemysģowej i ekonomicznej w drugiej poģowie XX wieku. Po II wojnie ķwiatowej Japoņczycy przyjęli motto: "Zģap i wyprzedž Zachód". Mieli nadzieję, ŋe zrobią to cięŋka praca, innowacje i przywiązanie do jakoķci: rzeczy, które sprawiģy, ŋe Stany Zjednoczone byģy zamoŋne. Japonia eksportuje dziķ sprzęt mechatroniczny. Czasami nazywa się to "Japan, Inc." Wraz z rozwojem sztucznej inteligencji (AI) w systemach robotycznych znaczenie mechaniki moŋe się zmniejszyæ, a znaczenie elektroniki moŋna się spodziewaæ wzrostu.
MEDYCZNY ROBOT
Nauki medyczne staģy się jedną z największych gaģęzi przemysģu w cywilizowanym ķwiecie. Istnieje wiele moŋliwych sposobów wykorzystania robotów w tej branŋy. Najbardziej prawdopodobny scenariusz dotyczy mobilnego asystenta robota lub pielęgniarki.
Paranurse
Robot paranurystyczny (asystent pielęgniarki) moŋe toczyæ się na trzech lub czterech koģach zamontowanych w podstawie. Dziaģanie robota moŋe byæ nadzorowane ze stanowiska pielęgniarek. Ten robot dziaģa bardzo podobnie do robota osobistego. Moŋe dostarczaæ posiģki, zbieraæ tace i wydawaæ leki w postaci tabletek. Zrobotyzowana paranura moŋe równieŋ, przynajmniej teoretycznie, dokonywaæ pomiarów parametrów ŋyciowych pacjenta (temperatura, tętno, ciķnienie krwi i częstoķæ oddechów).
W ciele
Roboty mogą byæ uŋywane jako sztuczne koņczyny. Pozwala to osobom po amputacji i paraplegikom dziaģaæ tak, jakby nigdy nie zostaģy ranne. Bardziej radykalne pojęcie wymyķlone przez niektórych badaczy robotyki dotyczy produkcji przeciwciaģ robotów. Te mikroskopijne stworzenia mogģyby zostaæ wstrzyknięte do krwiobiegu pacjenta i krąŋyģy wokoģo w poszukiwaniu wirusów lub bakterii i niszcząc je. Sterownik robota moŋna zaprogramowaæ tak, aby powodowaģ, ŋe maģe maszyny ķcigaģy tylko okreķlony rodzaj mikroorganizmu. Niektórzy badacze sugerują, ŋe związki organiczne mogą byæ ģączone cząsteczka po cząsteczce w celu stworzenia robotów biologicznych.
Zabawa
Jednym z bardziej interesujących zastosowaņ robotów w medycynie jest rozrywka pacjenta. W tym miejscu waŋna staje się sztuczna inteligencja (AI). Dla dzieci roboty mogą graæ w proste gry i czytaæ historie. W przypadku dorosģych roboty mogą czytaæ na gģos i prowadziæ rozmowy. Gģówny argument uŋyty przeciwko robotom medycznym utrzymuje, ŋe chorzy potrzebują ludzkiego dotyku, którego maszyna nie jest w stanie zapewniæ. Kontrargument twierdzi, ŋe roboty medyczne nie mają na celu zastąpienia ludzkich lekarzy i pielęgniarek, ale jedynie po to, aby odrobiæ luz, pomagając zģagodziæ nudę pacjentów, uwalniając ludzi do opieki nad bardziej krytycznymi sprawami. Niektórzy pacjenci, zwģaszcza dzieci, uwaŋają roboty za niezmiernie zabawne. Kaŋdy, kto przebywa w szpitalu od kilku dni, wie, jak nudne moŋe byæ. Robot, który potrafi opowiedzieæ kilka dobrych ŋartów, moŋe rozjaķniæ dzieņ kaŋdego pacjenta.
MEMORY [PAMIĘÆ]
Pamięæ odnosi się do przechowywania danych binarnych w postaci wysokiego i niskiego poziomu (logiczne jedynki i zera). Istnieje kilka form pamięci. Wielkoķæ pamięci jest czynnikiem decydującym o tym, jak "inteligentny" jest komputer. Jest równieŋ pomocny w wyborze odpowiedniego poziomu kontrolera dla systemu robotycznego. Pamięæ jest mierzona w bajtach, kilobajtach (kB), megabajtach (MB), gigabajtach (GB) i terabajtach (TB).
Pamięæ o dostępie swobodnym (RAM)
Ukģady pamięci o dostępie swobodnym (RAM) przechowują dane w macierzach zwanych macierzami. Dane mogą byæ adresowane (wybrane) z dowolnego miejsca w matrycy. Dane moŋna ģatwo zmieniaæ i przechowywaæ z powrotem w pamięci RAM, w caģoķci lub w częķci. Pamięæ RAM jest czasami nazywana pamięcią do odczytu / zapisu. Przykģadem pamięci RAM jest plik komputerowy do edycji tekstu. Ta definicja zostaģa zapisana w póģprzewodnikowej pamięci RAM, wraz ze wszystkimi definicjami terminów zaczynającymi się na literę M, zanim zostaģa zapisana na dysku, przetworzona i ostatecznie wydrukowana. Istnieją dwa rodzaje pamięci RAM: dynamiczna pamięæ RAM (DRAM) i statyczna pamięæ RAM (SRAM). DRAM wykorzystuje tranzystory i kondensatory z ukģadami scalonymi (IC); dane są przechowywane jako kondensatory na kondensatorach. Opģata musi zostaæ uzupeģniona często, albo zostanie utracony do rozģadowania. Uzupeģnianie odbywa się sto razy na sekundę. SRAM uŋywa obwodu zwanego flip-flop do przechowywania danych. Pozbywa się to koniecznoķci ciągģego uzupeģniania ģadunku, ale kompromis polega na tym, ŋe ukģady SRAM wymagają więcej elementów do przechowywania okreķlonej iloķci danych.
Zmienna i nieulotna pamięæ RAM
W przypadku dowolnej pamięci RAM dane są usuwane po wyģączeniu urządzenia, chyba ŋe przewidziano pewne moŋliwoķci tworzenia kopii zapasowych pamięci. Najczęstszym sposobem tworzenia kopii zapasowej pamięci jest uŋycie ogniwa lub baterii. Nowoczesne pamięci IC potrzebują tak maģo prądu do przechowywania swoich danych, ŋe bateria zapasowa wytrzyma tak dģugo w obwodzie, jak na póģce. Nowa forma nieulotnej pamięci RAM, znana jako pamięæ flash, moŋe przechowywaæ duŋe iloķci danych w nieskoņczonoķæ, nawet po odģączeniu zasilania. Pamięæ, która znika po odģączeniu zasilania, nazywana jest ulotną pamięcią. Jeķli pamięæ zostanie zachowana po odģączeniu zasilania, jest nieulotna.
Pamięæ tylko do odczytu (ROM i PROM)
W przeciwieņstwie do pamięci RAM, pamięæ tylko do odczytu (ROM) jest dostępna w caģoķci lub w częķci, ale nie jest nadpisywana. Standardowa pamięæ ROM jest programowana fabrycznie. To staģe programowanie jest znane jako oprogramowanie ukģadowe. Istnieją równieŋ ukģady pamięci ROM, które uŋytkownik moŋe zaprogramowaæ i przeprogramowaæ. Ten typ pamięci jest znany jako programowalna pamięæ tylko do odczytu (PROM).
Kasowalna PROM
Wymazywalnym, programowalnym ukģadem pamięci tylko do odczytu (EPROM) jest ukģad scalony których pamięæ jest typu tylko do odczytu, ale które moŋna przeprogramowaæ za pomocą okreķlonej procedury. Trudniej jest przepisaæ dane w pamięci EPROM niŋ w pamięci RAM; zwykģy proces usuwania polega na ekspozycji na promieniowanie ultrafioletowe (UV). Ukģad EPROM moŋna rozpoznaæ po obecnoķci przezroczystego okna ze zdejmowaną pokrywą, przez którą promienie UV są usuwane w celu usunięcia danych. Chip naleŋy pobraæ z obwodu, w którym jest uŋywany, wystawiæ na dziaģanie promieni UV przez kilka minut, a następnie przeprogramowaæ w specjalnym procesie. Istnieją pamięci EPROM, które moŋna usunąæ za pomocą ķrodków elektrycznych. Taki ukģad scalony nazywany jest elektrycznie kasowalną programowalną pamięcią tylko do odczytu (EEPROM). Chipów tych nie trzeba wyjmowaæ z obwodu w celu przeprogramowania.
MEMORY ORGANIZATION PACKET [PAKIET ORGANIZACJI PAMIĘCI]
Jednym z najbardziej obiecujących aspektów sztucznej inteligencji (AI) jest jej wykorzystanie jako narzędzia do przewidywania przyszģych wydarzeņ na podstawie tego, co wydarzyģo się w przeszģoķci. Procesowi temu pomaga uporządkowanie pamięci komputera w uogólnienia zwane pakietami organizacji pamięci (MOP). Niektóre prymitywne przykģady MOP to następujące stwierdzenia:
• Jeķli wiatr przesunie się na wschód i spadnie barometr, zwykle będzie padaģ deszcz (lub ķnieg w zimie) w ciągu 24 godzin.
• Jeķli wiatr przesunie się na zachód, a barometr się podniesie, czyszczenie zwykle następuje w ciągu kilku godzin.
• Lekkie wiatry i staģe wysokie ciķnienie barometryczne zwykle oznaczają niewielką zmianę pogody przez co najmniej 24 godziny.
• Zģa pogoda przy staģym, niskim ciķnieniu barometrycznym zwykle oznacza zģą pogodę przez co najmniej 24 godziny.
Są to szerokie uogólnienia i mają zastosowanie tylko w niektórych częķciach ķwiata (umiarkowane szerokoķci geograficzne nad lądem), ale są to MOP oparte na doķwiadczeniach meteorologów z ostatnich kilku stuleci. W sztucznej inteligencji system moŋna zaprogramowaæ tak, aby znajdowaģ najbardziej aktualne MOP na podstawie dostępnych danych. Następnie moŋe zastosowaæ te MOP w najbardziej efektywny moŋliwy sposób, aby dokonaæ prognozy w danej sytuacji.
MESSAGE PASSING [PRZEKAZYWANIE WIADOMOĶCI]
Przekazywanie wiadomoķci odnosi się do powtarzającego się przesyģania zģoŋonych danych między komputerami w sztucznie inteligentnym systemie. Gdy wiadomoķæ jest przekazywana wiele razy, mogą się zdarzyæ róŋne rzeczy aby zmieniæ treķæ (patrz ilustracja). Czy opowiadaģeķ kiedyķ komuķ historię, ale tylko po to, aby usģyszeæ ją póžniej w zupeģnie innej formie? To samo moŋe się zdarzyæ w systemach komputerowych. Haģas i znieksztaģcenia mogą zmieniaæ sygnaģy, ale w duŋej mierze udaģo się to rozwiązaæ dzięki nowoczesnym cyfrowym metodom transmisji. W przypadku wyrafinowanych komputerów pojawia się kolejny bugaboo. Sztucznie inteligentny system, zaprojektowany do subiektywnej oceny danych, a nie tylko ich przetwarzania, moŋe žle interpretowaæ komunikat, a nawet upiększyæ go w sposób, którego uŋytkownicy nie zamierzali i nie mogą przewidzieæ.
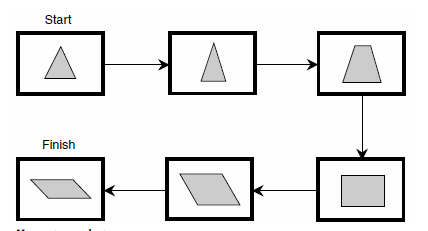
METAL-OXIDE SEMICONDUCTOR (MOS)
Tlenki niektórych metali wykazują wģaķciwoķci izolacyjne i dielektryczne. Tak zwane komponenty elektroniczne z tlenku metalu póģprzewodnika (MOS) są szeroko stosowane od lat. Materiaģy MOS obejmują związki takie jak tlenek glinu i dwutlenek krzemu. Urządzenia MOS są znane z niskiego zapotrzebowania na energię. Ukģady scalone MOS (IC) mają wysoką gęstoķæ komponentów i duŋą prędkoķæ roboczą. Wszystkie urządzenia MOS podlegają uszkodzeniom w wyniku wyģadowania elektrostatycznego. Dlatego naleŋy zachowaæ ostroŋnoķæ podczas pracy z komponentami MOS. Ukģady scalone i tranzystory MOS powinny byæ przechowywane z wyprowadzeniami wprowadzonymi do pianki przewodzącej, więc nie mogą tego dokonaæ duŋe róŋnice potencjaģów rozwijaæ się. Podczas budowania, testowania i serwisowania sprzętu elektronicznego w które urządzenia MOS są obecne, ciaģo technika i caģy sprzęt testowy powinny byæ utrzymywane na potencjale prądu staģego (DC). Technologia metal-tlenek-póģprzewodnik dobrze nadaje się do wytwarzania cyfrowych ukģadów scalonych. Opracowano kilka rodzin logicznych MOS. Są one szczególnie przydatne w aplikacjach pamięci o duŋej gęstoķci. Wiele mikrokomputerów wykorzystuje technologię MOS.
METRIC PATH PLANNING [PLANOWANIE METRYCZNEJ ĶCIEŊKI]
Metryczne planowanie ķcieŋki to schemat automatycznej nawigacji, w którym maszyna próbuje znaležæ optymalną ķcieŋkę między dwoma punktami. Zasadniczo wymaga to komputerowej mapy ķrodowiska, zawierającej wszystkie moŋliwe (lub prawdopodobne) trasy, które robot moŋe pokonaæ od punktu początkowego do celu. Typowym przykģadem planowania ķcieŋki metrycznej jest wybór trasy wzdģuŋ systemu autostrad między dwoma miastami. Zaģóŋmy, ŋe podróŋny zamierza odbyæ podróŋ z miasta X do miasta Y. Są to odpowiednio węzeģ początkowy i cel. Wymagana jest mapa pokazująca wszystkie autostrady i drogi między dwoma miastami, które stanowią moŋliwe lub rozsądne trasy. Ta mapa stanowi reprezentację. Im więcej szczegóģów pokazuje mapa, tym lepiej. Mapa powinna byæ jak najbardziej aktualna i powinna zawieraæ takie informacje, jak to, czy droga jest dwupasmowa czy czteropasmowa, strefy, w których prowadzona jest konserwacja dróg, nieregularnoķæ terenu i ogólne natęŋenie ruchu, które moŋe wystąpiæ na kaŋdym odcinku drogi. Korzystając z tych informacji, podróŋny planuje podróŋ; ten proces planowania stanowi algorytm. Postoje mogą byæ planowane, w zaleŋnoķci od dģugoķci podróŋy; są to węzģy poķrednie lub punkty trasy. Robot moŋe zaplanowaæ swoją trasę dokģadnie w taki sam sposób, jak podróŋujący jadący z miasta X do miasta Y. Idealnie maszyna wybierze jedną i tylko jedną optymalną ķcieŋkę między punktem początkowym a celem. Ta optymalna ķcieŋka moŋe zająæ najmniej czasu; alternatywnie moŋe to byæ ten, który wymaga najmniejszych nakģadów energii. Ķcieŋka najbardziej wydajna czasowo moŋe pokrywaæ się z ķcieŋką najbardziej wydajną energetycznie, ale nie zawsze tak jest.
MIKROKOMPUTER
Mikrokomputer to maģy komputer z jednostką centralną (CPU) zamkniętą w jednym pakiecie z ukģadem scalonym (IC). Procesor mikrokomputera jest czasem nazywany mikroprocesorem. Mikrokomputery róŋnią się wyrafinowaniem i pojemnoķcią pamięci, w zaleŋnoķci od zamierzonego zastosowania. Niektóre osobiste mikrokomputery są dostępne za mniej niŋ 100 USD. Takie urządzenia wykorzystują wyķwietlacze ciekģokrystaliczne (LCD) i mają klawiatury podobne do maszyn do pisania. Większe mikrokomputery są uŋywane przez powaŋniejszych hobbystów komputerowych i maģe firmy. Takie mikrokomputery kosztują zwykle od kilkuset do kilku tysięcy dolarów. Mikrokomputery są często uŋywane do regulacji pracy urządzeņ elektrycznych i elektromechanicznych. Jest to znane jako sterowanie mikrokomputerowe. Sterowanie mikrokomputerem umoŋliwia wykonywanie zģoŋonych zadaņ przy minimalnym stopniu trudnoķci. Sterowanie mikrokomputerem jest szeroko stosowane w takich urządzeniach jak roboty, samochody i samoloty. Na przykģad moŋna zaprogramowaæ mikrokomputer, aby wģączaģ piekarnik, podgrzewaģ ŋywnoķæ do okreķlonej temperatury przez okreķlony czas, a następnie ponownie wyģączaģ piekarnik. Mikrokomputerów moŋna uŋywaæ do sterowania silnikami samochodowymi w celu zwiększenia wydajnoķci i przebiegu benzyny . Mikrokomputery mogą nawigowaæ i lataæ samolotami. Mówi się, ŋe nowoczesny samolot odrzutowy jest naprawdę gigantycznym robotem, poniewaŋ moŋe (przynajmniej teoretycznie) wykonaæ lot sam, bez jednego czģowieka na pokģadzie. Jednym z najnowszych i ekscytujących zastosowaņ sterowania mikrokomputerami jest elektronika medyczna. Mikrokomputery moŋna zaprogramowaæ w taki sposób, aby dostarczaģy impulsy elektryczne do kontrolowania nieprawidģowo funkcjonujących narządów ciaģa, do poruszania mięķniami sparaliŋowanych osób i do róŋnych innych celów.
MIKROWIEDZA
Mikrokowiedza to szczegóģowa wiedza na temat maszyn. W inteligentnym robocie lub systemie komputerowym mikrowiedza obejmuje reguģy logiczne, programy i dane przechowywane w pamięci. Przykģadem mikrozwiedzy jest dokģadny opis osoby. W osobistym inteligentnym robocie mikrokowiedza pozwala maszynie rozpoznaæ wģaķciciela (wģaķcicieli). Ta mikrozwiedza idealnie moŋe równieŋ poinformowaæ robota, jeķli osoba, która się do niego zbliŋa, to osoba, której nigdy wczeķniej nie spotkaģa. Innym przykģadem mikrozwiedzy jest komputerowa mapa ķrodowiska pracy.
MIKROFALOWA TRANSMISJA DANYCH
Mikrofalowa transmisja danych odnosi się do wysyģania i odbierania danych bezprzewodowych na bardzo wysokich częstotliwoķciach radiowych. Mikrofale są bardzo krótkimi falami elektromagnetycznymi, ale mają dģuŋsze fale niŋ energia podczerwieni (IR). Mikrofale przemieszczają się w atmosferze w zasadzie liniami prostymi i jonosfera nie ma na nie wpģywu. W ten sposób mogą ģatwo przenosiæ się z powierzchni Ziemi w kosmos i z kosmosu na powierzchnię. Mikrofale są przydatne w przypadku ģączy danych o krótkim zasięgu i wysokiej niezawodnoķci. Ģącznoķæ satelitarna i kontrola odbywają się zwykle na częstotliwoķciach mikrofalowych. Region mikrofalowy zawiera ogromną iloķæ przestrzeni widmowej i moŋe pomieķciæ wiele sygnaģów szerokopasmowych. Promieniowanie mikrofalowe moŋe powodowaæ nagrzewanie niektórych materiaģów. To ogrzewanie moŋe byæ niebezpieczne dla ludzi, gdy promieniowanie mikrofalowe jest intensywne. Podczas pracy ze sprzętem mikrofalowym naleŋy zachowaæ ostroŋnoķæ, aby uniknąæ naraŋenia na promieniowanie. Ilustracja pokazuje uproszczony schemat blokowy nadajnika i odbiornika mikrofalowego, w tym anten. Anteny są bardzo kierunkowe i muszą byæ skierowane do siebie w linii widzenia między nimi. Transmisja danych mikrofalowych jest przydatna w robotycznych systemach, w których moŋna utrzymywaæ linię wzroku między maszynami podczas ich komunikacji.
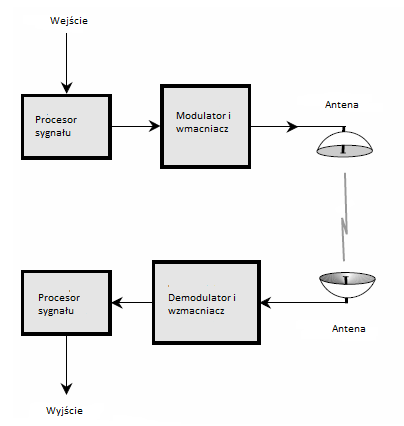
MILITARY ROBOT [ROBOT WOJSKOWY]
Za kaŋdym razem, gdy opracowywane są nowe technologie, eksperci wojskowi szukają sposobów, w jakie urządzenia i systemy mogą byæ uŋywane podczas dziaģaņ wojennych. Szczególną uwagę zwrócono na roboty wojskowe, poniewaŋ gdyby maszyny mogģy zająæ miejsce ludzi w walce, liczba ofiar byģaby mniejsza. Na przykģad androidy mogą byæ uŋywane jako ŋoģnierze robotów, technicy i do wielu innych zadaņ, które ludzie musieliby wykonywaæ w innym przypadku. Roboty medyczne mogģyby pomóc w szpitalach rannym ludziom. Zrobotyzowane samoloty i czoģgi istnieją od jakiegoķ czasu. Sztuczna inteligencja (AI) wzbudziģa takŋe zainteresowanie umysģów wojskowych. Za pomocą superkomputerów strategia wojenna moŋe zostaæ zoptymalizowana. Komputery mogą podejmowaæ decyzje bez wpģywu emocji.
MODEM
Termin modem jest skrótem modulatora / demodulatora. Modem ģączy komputer z ģączem komunikacyjnym, umoŋliwiając robotom komunikację ze sobą i / lub z centralnym sterownikiem. Komputer pracuje z binarnymi sygnaģami cyfrowymi, które szybko zmieniają się w prądach staģych. Aby dane cyfrowe byģy przesyģane przez obwód komunikacyjny, dane muszą zwykle zostaæ przekonwertowane na postaæ analogową. Odbywa się to poprzez zmianę cyfry 1 na ton audio, a cyfry 0 na inny ton o innej wysokoķci. Rezultatem jest niezwykle szybka naprzemienna zmiana dwóch tonów. W modulacji dane cyfrowe zamieniane są na dane analogowe. Jest to rodzaj konwersji cyfrowo-analogowej (D / A). Demodulacja zmienia sygnaģy analogowe z powrotem na cyfrowe; jest to konwersja analogowo-cyfrowa (A / D). Modemy pracują z róŋnymi prędkoķciami, zwykle mierzonymi w bitach na sekundę (bps). Często sģyszysz o kilobitach na sekundę (kb / s), gdzie 1 kb / s = 1000 b / s, lub megabitów na sekundę (Mb / s), gdzie 1 Mb / s = 1000 kb / s. Im wyŋsza wartoķæ bps, tym szybciej dane są wysyģane i odbierane przez modem. Modemy są oceniane wedģug najwyŋszej prędkoķci danych, jaką mogą obsģuŋyæ. Ilustracja jest funkcjonalnym schematem blokowym modemu. Modulator lub przetwornik cyfrowo-analogowy zmienia cyfrowe dane komputera na džwięki. Demodulator lub konwerter A / D zamienia przychodzące tony audio na sygnaģy cyfrowe do komputera.
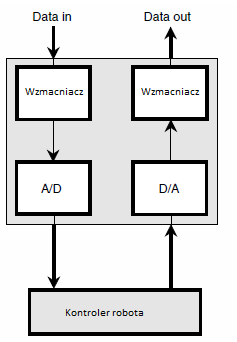
MODUĢOWA KONSTRUKCJA
Kilka dekad temu sprzęt elektroniczny byģ w duŋej mierze zbudowany inaczej niŋ dzisiaj. Komponenty zostaģy zamontowane na listwach ģączących, a okablowanie zostaģo wykonane punkt-punkt. Tego rodzaju okablowanie jest nadal stosowane w niektórych nadajnikach radiowych duŋej mocy, ale w ostatnich latach modularna konstrukcja staģa się reguģą. W moduģowej metodzie budowy stosowane są pojedyncze pģytki drukowane, a kaŋda pģytka (zwana takŋe kartą) ma okreķloną funkcję. Czasami kilka kart ģączy się w moduģ. Karty lub moduģy moŋna caģkowicie usunąæ, zwykle za pomocą prostego narzędzia przypominającego szczypce. Zģącza krawędziowe uģatwiają wymianę. Zģącza brzegowe są poģączone ze sobą w celu poģączenia między kartami i moduģami. Moduģowa konstrukcja uproķciģa utrzymanie skomplikowanej aparatury. Naprawa w terenie polega na identyfikacji, usunięciu i wymianie wadliwej karty lub moduģu. Wadliwa jednostka jest wysyģana do centralnej placówki, gdzie jest naprawiana przy uŋyciu wyrafinowanego sprzętu. Po naprawieniu karty lub moduģu moŋe ona sģuŋyæ jako jednostka zastępcza, gdy zajdzie taka potrzeba.
MOTOR [SILNIK]
Silnik przeksztaģca energię elektryczną lub chemiczną w energię mechaniczną. Silniki elektryczne są powszechnie stosowane w robotach. Mogą dziaģaæ z prądu przemiennego (AC) lub prądu staģego (DC) i mogą obracaæ się w szerokim zakresie prędkoķci, zwykle mierzonych w obrotach na minutę (rpm) lub obrotach na sekundę (rps). Silniki wahają się od maģych urządzeņ w zegarku na rękę po ogromne, potęŋne maszyny, które mogą ciągnąæ pociąg. Wszystkie silniki dziaģają za pomocą efektów elektromagnetycznych. Prąd elektryczny przepģywa przez zestaw cewek, wytwarzając pola magnetyczne. Siģy magnetyczne powodują obrót. Im większy prąd w cewkach, tym większa jest siģa obrotowa. Gdy silnik jest podģączony do obciąŋenia, siģa potrzebna do obrócenia waģu wzrasta. Im większa siģa, tym większy przepģyw prądu i tym większa moc pobierana jest ze žródģa zasilania. Ilustracja jest schematem dziaģania typowego silnika elektrycznego. Jeden zestaw cewek obraca się wraz z waģem silnika. Nazywa się to cewką twornika. Drugi zestaw cewek jest staģy i nazywa się cewką polową. Komutator odwraca prąd przy kaŋdym póģobrotu silnika, dzięki czemu waģ obraca się w tym samym kierunku. Silnik elektryczny dziaģa na tej samej zasadzie co generator elektryczny. W rzeczywistoķci niektóre silniki mogą byæ uŋywane jako generatory.
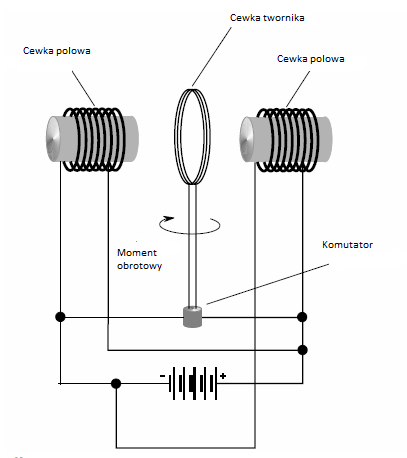
MULTIPLEKS
Multipleks oznacza transmisję dwóch lub więcej wiadomoķci za poķrednictwem tej samej linii lub kanaģu w tym samym czasie. Transmisja multipleksowa odbywa się na róŋne sposoby. Najpopularniejsze metody to multipleks z podziaģem częstotliwoķci (FDM) i multipleks z podziaģem czasu (TDM). W FDM kanaģ komunikacyjny jest podzielony na podkanaģy. Zaģóŋmy, ŋe kanaģ ma szerokoķæ 24 kHz (kiloherców). Wtedy teoretycznie moŋe pomieķciæ osiem sygnaģów o szerokoķci 3 kHz. Częstotliwoķci sygnaģów muszą byæ odpowiednie, aby się nie nakģadaģy. Zwykle po obu stronach kaŋdego podkanaģu jest trochę więcej miejsca, aby nie dopuķciæ do nakģadania się. W FDM dane są przesyģane równolegle. Oznacza to, ŋe informacje we wszystkich kanaģach są wysyģane jednoczeķnie. Czasami dane są nieporęczne w równolegģym przesyģaniu. Takie dane mogą byæ konwertowane do postaci szeregowej za pomocą TDM. W tym trybie sygnaģy są dzielone na kawaģki "w czasie", a następnie kawaģki są wysyģane w kolejnoķci obrotowej. Spowalnia to szybkoķæ przesyģania danych o wspóģczynnik równy liczbie sygnaģów. Na przykģad, jeķli kaŋdy z szeķciu komunikatów ma dģugoķæ 1 s, jeķli jest wysyģany sam z peģną prędkoķcią, sygnaģ multipleksowany z podziaģem czasu zajmie 6 s.
Naukowcy zawsze dąŋą do uzyskania większej "mocy komputera" w mniejszej przestrzeni fizycznej. Oznacza to superminiaturyzację elementów elektronicznych. Jest to szczególnie waŋne dla rozwoju sztucznej inteligencji (AI). Istnieje praktyczny limit liczby bramek logicznych lub przeģączników, które moŋna wytrawiæ w ukģadzie scalonym (IC) lub ukģadzie scalonym o danym rozmiarze. Limit ten zaleŋy od precyzji procesu produkcyjnego. Poniewaŋ metody ulegģy poprawie, gęstoķæ bramek logicznych na pojedynczym chipie wzrosģa. Moŋe to jednak pójķæ tylko do tej pory. Sugerowano, ŋe zamiast wytrawiania bramek logicznych w krzem w celu wytworzenia ukģadów komputerowych, inŋynierowie mogą podejķæ do problemu z przeciwnego punktu widzenia. Czy moŋna budowaæ ukģady atom po atomie? Ten proces spowodowaģby jak największą liczbę bramek logicznych lub przeģączników w danej objętoķci przestrzeni. Ten hipotetyczny czip nazwano nanochipem, poniewaŋ poszczególne przeģączniki mają wymiary rzędu kilku nanometrów. Jeden nanometr (1 nm) to 0,000000001 metra (10-9 m) lub milionowej częķci milimetra.
NANOROBOTYKA
Roboty superminiaturowe, zwane nanorobotami, mogą znaležæ wszelkiego rodzaju egzotyczne zastosowania. Robotyka Eric Drexler zasugerowaģ, ŋe takie maszyny mogą sģuŋyæ jako programowalne przeciwciaģa, wyszukując i niszcząc szkodliwe bakterie i wirusy w ludzkim ciele. W ten sposób moŋna wyleczyæ choroby. Maszyny mogģyby równieŋ naprawiaæ uszkodzone komórki. Plagi, które ludzie kiedyķ uwaŋali za zlikwidowane na dobre, takie jak gružlica i malaria, rozwijają nowe szczepy, które są odporne na konwencjonalne leczenie. Badania biologiczne są w duŋej mierze procesem prób i bģędów. Zaģóŋmy, ŋe ludzie mogliby budowaæ miliony inteligentnych robotów o wymiarach nanometrycznych, zaprogramowanych tak, aby ķcigaģy niektóre bakterie i wirusy i zabijaģy je? Futuryķci uwaŋają, ŋe jest to moŋliwe. Przewidują budowę komputerów molekularnych z pojedynczych atomów węgla, podstawowego skģadnika wszelkiej ŋywej materii. Komputery te przechowują dane w podobny sposób jak DNA, ale komputery byģyby programowane przez ludzi, a nie przez naturę. Komputery te mogą byæ tak maģe, jak 100 nm (10-7 m lub 0,0001 mm). Nawet tak maģy obiekt ma wystarczającą iloķæ atomów węgla, aby utworzyæ ukģad o mocy obliczeniowej równej mocy typowego komputera osobistego. Nanorobotyka ma ciemną stronę. Wszystko, co moŋna konstruktywnie wykorzystaæ, moŋe byæ równieŋ uŋyte w sposób niszczący. Programowalne przeciwciaģa mogą, jeķli dostaną się w ręce niewģaķciwych rodzajów ludzi, zostaæ wykorzystane jako biologiczne
NATURALNY JĘZYK
Język naturalny to język mówiony lub pisany powszechnie uŋywany przez ludzi. Przykģadami są angielski, hiszpaņski, rosyjski i chiņski. W przyjaznych dla uŋytkownika systemach komputerowych i robotycznych waŋne jest, aby maszyna potrafiģa mówiæ i / lub pisaæ, a takŋe rozumieæ jak najwięcej naturalnego języka. Im bardziej naturalny język moŋe zaakceptowaæ i wygenerowaæ maszyna, tym więcej osób będzie mogģo korzystaæ z maszyny, poķwięcając mniej czasu na naukę, jak to zrobiæ. Język naturalny będzie niezwykle waŋny w przyszģoķci hobby i robotyki osobistej. Na przykģad, jeķli chcesz, aby twój robot Cyberius podaģ filiŋankę wody, chciaģbyķ powiedzieæ: "Cyberius, proszę, podaj mi filiŋankę". Nie musisz wpisywaæ wielu cyfr, liter i znaków interpunkcyjnych na terminalu ani mówiæ tajemnym ŋargonem, który nie przypomina zwykģego mówienia.
NESTED LOOPS [PĘTLE ZAGNIEŊDŊONE]
W schematach lub programach wnioskowania często występują pętle logiczne. Pętla to zestaw operacji lub kroków, który jest powtarzany dwa razy lub więcej. Czasami pętle występują wewnątrz innych pętli. Mówi się wtedy, ŋe są to zagnieŋdŋone pętle. Mniejsza pętla w gnieždzie zwykle wymaga mniejszej liczby kroków na powtórzenie niŋ większa pętla. Liczba przypadków wykonania pętli jest niezaleŋna od liczby zawartych w niej kroków. Maģa, wtórna pętla moŋe byæ powtarzana 1 milion razy, podczas gdy otaczająca ją większa pętla jest powtarzana tylko 100 razy. Ilustracja jest schematem blokowym pokazującym prosty przykģad zagnieŋdŋenia. Kwadraty wskazują kroki proceduralne, takie jak "Pomnóŋ przez 3, a następnie dodaj 2." Diamenty to kroki IF / THEN / ELSE, które są kluczowe dla kaŋdej pętli. Znaki zapytania wewnątrz diamentów wskazują, ŋe naleŋy dokonaæ wyboru tak / nie, na przykģad "Czy x jest większy niŋ 587?" Znak minus (-) jest jak "nie" w pytaniu, w którym to przypadku proces musi wróciæ do wczeķniejszego punktu. Znak plus (+) jest jak "Tak", informujący o tym, aby proces byģ kontynuowany. Zagnieŋdŋone pętle są powszechne w programach komputerowych, zwģaszcza gdy występują skomplikowane obliczenia matematyczne. Prawdopodobnie równieŋ zachodzi zagnieŋdŋanie się pętli myķlowych w ludzkim umyķle. Kaŋda próba mapowania ludzkich procesów myķlowych ujawnia fantastyczne, niezliczone zwroty akcji. Kaŋda próba modelowania ludzkiej myķli wymaga uŋycia zagnieŋdŋonych pętli. Jest to rozwaŋane w badaniach nad sztuczną inteligencją (AI).
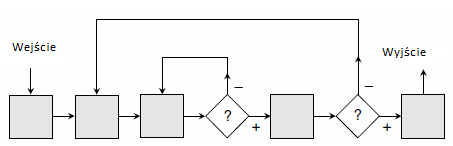
NEURONOWA SIEÆ
Termin sieæ neuronowa odnosi się do dowolnej z kilku form alternatywnej technologii komputerowej. Podstawową ideą wszystkich sieci neuronowych jest naķladowanie dziaģania ludzkiego mózgu.
Zasoby
W porównaniu z komputerami cyfrowymi sieci neuronowe są szybkie. Mogą wyciągaæ wnioski szybciej niŋ maszyny cyfrowe. Sieci neuronowe są dobre w zadaniach takich jak rozpoznawanie obiektów i rozpoznanie mowy. Sieci neuronowe mogą pobieraæ maģe fragmenty informacji o obiekcie, džwięku lub innej zģoŋonej rzeczy i wypeģniaæ luki, aby uzyskaæ caģoķæ. Zostaģo to wyražnie pokazane, gdy wczesna wersja sieci neuronowej wykonaģa niepeģny (20 procent) obraz radarowy samolotu odrzutowego i, na podstawie tych danych, stworzyģa peģną grafikę typu samolotu, który spowodowaģ echa. Sieci neuronowe mogą uczyæ się na bģędach, poprawiając wydajnoķæ po wielokrotnym powtarzaniu zadania. Wykazują równieŋ peģną wdzięku degradację, więc jeķli częķæ systemu zostanie zniszczona, reszta moŋe utrzymaæ bieg, choæ z mniejszą prędkoķcią i / lub z mniejszą dokģadnoķcią.
Ograniczenia
Sieci neuronowe są nieprecyzyjne. Jeķli poprosisz kogoķ o zrównowaŋenie ksiąŋeczki czekowej zbliŋy się ona, ale nie da dokģadnej odpowiedzi. Sieci neuronowe nie są przeznaczone do wykonywania obliczeņ, które moŋe przeprowadziæ komputer cyfrowy. Kalkulator 5,00 $ przewyŋszy nawet najbardziej zģoŋoną sieæ neuronową w podstawowej arytmetyce. W tym sensie technologia sieci neuronowej przypomina analogową technologię komputerową. Kolejna sģaboķæ sieci neuronowych wynika z faktu, ŋe one nieuchronnie popeģniają bģędy, gdy zbliŋają się do swoich wniosków. Cyfrowe maszyny rozkģadają problemy na maģe częķci, drobiazgowo rozdrabniając rozwiązanie do poziomu dokģadnoķci ograniczonego jedynie liczbą tranzystorów, które moŋna wytworzyæ na chipie krzemu. Sieci neuronowe rozwiązują problemy jako caģoķæ, modyfikując ich perspektywy, aŋ wyniki speģnią okreķlone warunki. Moŋna uogólniæ, ŋe komputery cyfrowe są analityczne, podczas gdy sieci neuronowe są intuicyjne.
Logika rozmyta
Maszyny cyfrowe rozpoznają na poziomie podstawowym dwa warunki lub stany: logikę 1 i logikę 0. Te dwa stany logiczne moŋna okreķliæ w kategoriach wysokiej / niskiej, prawdziwej / faģszywej, plus / minus, tak / nie, czerwony / zielony, góra / dóģ, przód / tyģ lub jakakolwiek inna wyražna dychotomia. Ludzki mózg skģada się z neuronów i synaps w ogromnej sieci, z których wszystkie mogą komunikowaæ się z wieloma innymi. W sieci neuronowej "neurony" i "synapsy" są elementami przetwarzającymi i ķcieŋkami danych między nimi. Pierwsi entuzjaķci sieci neuronowych postulowali, ŋe ludzki mózg dziaģa jak wielka cyfrowa maszyna, której neurony i synapsy "strzelają" lub "milczą". Póžniej okazaģo się, ŋe sprawy są bardziej skomplikowane. W niektórych sieciach neuronowych neurony mogą wysyģaæ tylko dwa róŋne typy sygnaģów i reprezentują mózg zgodnie z teorią z lat 50. XX wieku. Jednak wyniki moŋna modyfikowaæ, nadając niektórym neuronom i / lub synapsom większe znaczenie niŋ inne. To tworzy logikę rozmytą, w której prawda i faģsz istnieje z róŋną waŋnoķcią.
Sieci neuronowe i sztuczna inteligencja
Niektórzy badacze sugerują, ŋe ostateczny cel sztucznej inteligencji moŋna osiągnąæ poprzez "poģączenie" technologii cyfrowych i sieci neuronowych. Inni uwaŋają, ŋe sieci neuronowe stanowią ķlepy zauģek, a technologia cyfrowa wyražnie udowodniģa, ŋe jest najlepszym sposobem na zbudowanie komputera. Badania sieci neuronowej przeszģy cykle boomu i upadku, częķciowo w wyniku róŋnic zdaņ. Psychologowie są zainteresowani tą technologią, poniewaŋ moŋe pomóc im odpowiedzieæ na pytania dotyczące ludzkiego mózgu. Jednak ŋadna sieæ neuronowa nie zbliŋyģa się do takiej zģoŋonoķci. Nawet największe wymyķlone sieci neuronowe, z miliardami neuronów i trylionami synaps, byģyby mniej inteligentny niŋ kot czy pies.
NODE [WĘZEĢ]
Węzeģ jest konkretnym, waŋnym punktem na ķcieŋce robota mobilnego lub efektora koņcowego, który porusza się po swoim otoczeniu. Punkt początkowy nazywa się węzģem początkowym; punkt docelowy nazywany jest węzģem celu. Punkty decyzyjne, jeķli występują, między węzģem początkowym a docelowym, są węzģami poķrednimi. Na przykģad w planowaniu ķcieŋek metrycznych robot mobilny w zģoŋonym ķrodowisku z wieloma przeszkodami nawiguje między węzģami początkowym i docelowym, najpierw okreķlając zestaw węzģów poķrednich lub punktów poķrednich, a następnie podąŋając ķcieŋkami między tymi węzģami. W sieci komunikacyjnej termin węzeģ odnosi się do okreķlonej lokalizacji, w której dane są przetwarzane lub przesyģane. Przykģady obejmują stacje robocze, serwery, drukarki i aparaty fotograficzne. W systemie robotycznym pojedyncze roboty stanowią węzģy komunikacyjne, jeķli mogą komunikowaæ się z innymi robotami lub ze sterownikiem centralnym. Centralnym kontrolerem floty robotów owadowych jest węzeģ komunikacyjny.
NOISE [SZUM]
Szum to szerokopasmowe pole prądu przemiennego (AC) lub elektromagnetyczne (EM). W przeciwieņstwie do sygnaģów szum nie przenosi informacji. Haģas moŋe byæ naturalny lub wytwarzany przez czģowieka. Haģas zawsze obniŋa jakoķæ komunikacji. Jest to powaŋny problem w kaŋdym urządzeniu lub systemie, w którym dane są przesyģane z jednego miejsca do drugiego, np. Flota robotów mobilnych, które muszą wymieniaæ dane, lub rój robotów owadowych pod nadzorem centralnego kontrolera. Im wyŋszy poziom haģasu, tym silniejszy musi byæ sygnaģ, jeķli ma byæ odbierany bezbģędnie. Przy danym poziomie mocy sygnaģu wyŋsze poziomy haģasu przekģadają się na więcej bģędów i zmniejszony zasięg komunikacji. Ilustracja jest widmowym wyķwietlaniem sygnaģów i szumu, z amplitudą jako funkcją częstotliwoķci. Poziom haģasu w tle nazywany jest poziomem szumu. Pionowe linie lub piki wskazują sygnaģy silniejsze niŋ szum. Sygnaģy poniŋej poziomu szumu nie pojawiają się na wyķwietlaczu i nie moŋna ich odebraæ, chyba ŋe zostaną znalezione jakieķ ķrodki obniŋające poziom haģasu (to znaczy obniŋenie poziomu haģasu). Poziom haģasu w systemie moŋna zminimalizowaæ, stosując komponenty, które pobierają moŋliwie najmniejszy prąd. Haģas moŋna równieŋ ograniczyæ, obniŋając temperaturę wszystkich komponentów systemu. Niektóre eksperymenty przeprowadzono w ekstremalnie niskich temperaturach; nazywa się to technologią kriogeniczną. Ogólnie im węŋsze pasmo sygnaģu, tym lepszy będzie moŋliwy do uzyskania stosunek sygnaģu do szumu, jednak poprawa ta odbywa się kosztem szybkoķci danych. Systemy ķwiatģowodowe są stosunkowo odporne na wpģyw haģasu. Metody transmisji cyfrowej przewyŋszają metody analogowe pod względem odpornoķci na zakģócenia. Niezaleŋnie od wszystkich tych czynników istnieje ograniczenie, o ile poziom haģasu moŋna zmniejszyæ. Pewny haģas będzie istniaģ bez względu na zastosowaną technologię.
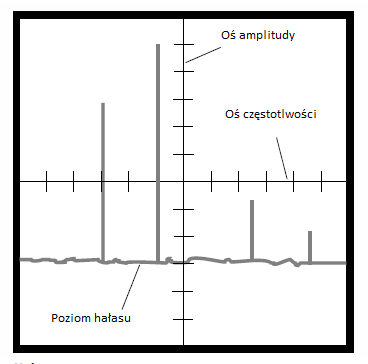
NUCLEAR SERVICE ROBOT [ROBOT SERWISOWY JĄDROWY]
Roboty dobrze nadają się do przenoszenia niebezpiecznych materiaģów. Wynika to z faktu, ŋe jeķli dojdzie do wypadku w ķrodowisku zamieszkaģym tylko przez maszyny, ŋycie ludzkie nie zostanie utracone. W przypadku substancji radioaktywnych roboty mogą byæ uŋywane i obsģugiwane za pomocą zdalnego sterowania, dzięki czemu ludzie nie będą naraŋeni na promieniowanie. Zdalne sterowanie odbywa się za pomocą teleoperacji i / lub teleobecnoķci. Roboty usģug jądrowych są uŋywane od pewnego czasu do konserwacji elektrowni atomowych. Jedna z takich maszyn, zwana ROSA, zostaģa zaprojektowana i zbudowana przez Westinghouse Corporation. Sģuŋy do naprawy i wymiany rur wymiennika ciepģa w kotģach. Poziom promieniowania jest niezwykle wysoki w tym ķrodowisku. Ludziom trudno jest wykonywaæ te zadania bez naraŋania zdrowia. Jeķli ludzie spędzają w pracy więcej niŋ kilka minut miesięcznie, skumulowana dawka promieniowania przekracza granice bezpieczeņstwa. Dģugotrwaģe nadmierne naraŋenie na promieniowanie zwiększa częstoķæ występowania raka i wad wrodzonych. Krótkotrwaģe, ekstremalne naraŋenie moŋe spowodowaæ chorobę popromienną lub ķmieræ. Roboty rozbroją gģowice jądrowe. Jeķli bģędny pocisk zostanie znaleziony z niewybuchģą gģowicą, lepiej jest uŋyæ maszyn, aby wyeliminowaæ niebezpieczeņstwo, niŋ naraŋaæ ludzi na ryzyko (i stres psychiczny) w pracy.
NUMERACJA
Kilka systemów liczbowych jest uŋywanych w informatyce, elektronice cyfrowej i robotyce. Schemat najczęķciej uŋywany przez ludzi to moduģ 10, zwany takŋe systemem liczb dziesiętnych.
Liczby dziesiętne
System liczb dziesiętnych jest równieŋ nazywany modulo 10, podstawa 10 lub podstawa 10. Cyfry są elementami zestawu {0, 1, 2, 3, 4, 5, 6, 7, 8, 9}. Cyfra znajdująca się bezpoķrednio po lewej stronie punktu (dziesiętnego) jest mnoŋona przez 100 lub 1. Kolejna cyfra po lewej jest mnoŋona przez 10 1 lub 10. Moc 10 roķnie wraz z przesuņ się dalej w lewo. Pierwsza cyfra po prawej stronie punktu podstawy jest mnoŋona przez wspóģczynnik 10 -1 lub 1/10. Następna cyfra po prawej stronie jest mnoŋona przez 10 -2 lub 1/100. Trwa to, gdy idziesz dalej w prawo. Po zakoņczeniu procesu pomnoŋenia kaŋdej cyfry wartoķci wynikowe są dodawane. To jest reprezentowane, gdy piszesz liczbę dziesiętną. Na przykģad,

Liczby binarne
System liczb binarnych to metoda wyraŋania liczb za pomocą tylko cyfry 0 i 1. Czasami nazywa się to podstawą 2, lub modulo 2. Cyfra znajdująca się bezpoķrednio po lewej stronie jest cyfrą "jeden". Następna cyfra po lewej to cyfra "dwa"; po tym następuje cyfra "czwórki". Przesuwając się bardziej w lewo, cyfry oznaczają 8, 16, 32, 64 itd., Podwajając się za kaŋdym razem. Po prawej stronie punktu podstawnika wartoķæ kaŋdej cyfry jest przecinana raz po raz, czyli 1/2, 1/4, 1/8, 1/16, 1/32, 1/64 i tak dalej. Rozwaŋ przykģad z liczbą dziesiętną 94:
94 = (4 x 100) + (9 x 101)
W systemie liczb binarnych podziaģ jest następujący
1011110 = (0 x 20) + (1 x 21) + (1 x 22)
+ (1 x 23) + (1 x 24 + (0 x 25) + (1 x 26)
Podczas pracy z komputerem lub kalkulatorem podajesz liczbę dziesiętną, która jest konwertowana na postaæ binarną. Komputer lub kalkulator wykonuje swoje operacje na zerach i zerach. Po zakoņczeniu procesu urządzenie konwertuje wynik z powrotem do postaci dziesiętnej w celu wyķwietlenia.
Liczby ósemkowe i szesnastkowe
Innym schematem numeracji jest system liczb ósemkowych, który ma osiem symboli lub 23. Kaŋda cyfra jest elementem zestawu {0, 1, 2, 3, 4, 5, 6, 7}. Liczenie przebiega zatem od 7 bezpoķrednio do 10, od 77 bezpoķrednio do 100, od 777 bezpoķrednio do 1000 i tak dalej. Jeszcze innym schematem, powszechnie stosowanym w praktyce komputerowej, jest szesnastkowy system liczbowy, tak nazwany, poniewaŋ ma 16 symboli lub 24. Te cyfry to zwykle 0 do 9 plus szeķæ kolejnych, reprezentowanych przez A do F, pierwsze szeķæ liter Alfabet. Zestaw cyfr to {0, 1, 2, 3, 4, 5, 6, 7, 8, 9, A, B, C, D, E, F}.
Jedną z metod, dzięki której robotyczny system wizyjny moŋe definiowaæ rzeczy, jest nazywana grafiką obiektową, znaną równieŋ jako grafika wektorowa. Jest to potęŋna technika wykorzystująca reprezentacje analogowe, a nie cyfrowe, do przedstawiania róŋnych ksztaģtów. Przykģadem zorientowanej obiektowo grafiki jest okrąg w kartezjaņskiej pģaszczyžnie wspóģrzędnych, zdefiniowany zgodnie z jego równaniem algebraicznym. Rozwaŋ okrąg reprezentowany przez równanie x 2 + y 2 = 1. Nazywa się to kóģkiem jednostkowym, poniewaŋ ma promieņ jednej jednostki, jak pokazano poniŋej .
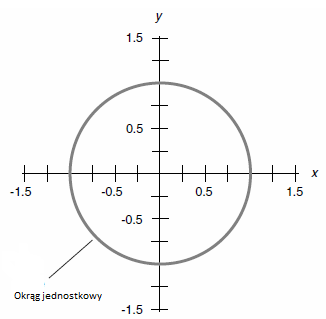
Równanie jest ģatwe do zapisania przez komputer w pamięci. Innym, jeszcze prostszym odwzorowaniem tego koģa jest jego równanie we wspóģrzędnych biegunowych
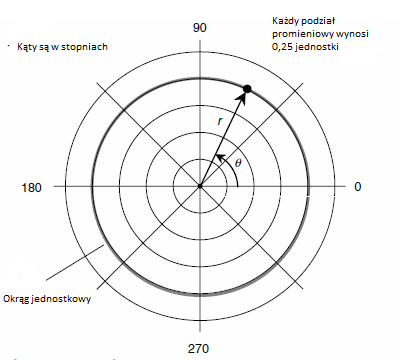
W tym ukģadzie okrąg jednostkowy jest reprezentowany przez r = 1. Oba równania są matematycznie dokģadnymi reprezentacjami koģa, a nie cyfrowymi przybliŋeniami. Cyfrowe lub odwzorowane bitowo odwzorowanie koģa jednostkowego wymaga przybliŋenia. Precyzja zaleŋy od rozdzielczoķci obrazu. Reprezentacja obiektowa jest często bardziej precyzyjna i pozwala uniknąæ problemu jaggies, zwanego takŋe aliasingiem, który zawsze jest artefaktem obrazu odwzorowanego bitowo.
OBIEKTÓW ROZPOZNAWANIE
Rozpoznawanie obiektów odnosi się do dowolnej metody uŋywanej przez robota do wybierania czegoķ spoķród innych rzeczy. Przykģadem jest zdobycie kubka z szafki. Moŋe to wymagaæ wybrania przez robota okreķlonego obiektu, takiego jak "kubek Jane". Zaģóŋmy, ŋe poprosisz swojego osobistego robota, aby poszedģ do kuchni i przyniósģ ci szklankę peģną soku pomaraņczowego. Pierwszą rzeczą, którą musi zrobiæ robot, jest znalezienie kuchni. Następnie musi zlokalizowaæ szafkę z zastawkami. W jaki sposób robot wybierze z szafki kubek, a nie talerz czy miskę? Jest to forma problemu pobierania bin. Jednym ze sposobów znalezienia kubka przez robota jest system wizyjny, który identyfikuje go po ksztaģcie. Inną metodą jest wyczucie dotykowe. Robot moŋe dwukrotnie sprawdziæ, po zģapaniu obiektu myķli, ŋe jest to kubek, aby sprawdziæ, czy jest on cylindryczny (charakterystyczny ksztaģt kubka). Jeķli wszystkie kubki w Twojej szafce waŋą to samo, a jeķli ta waga róŋni się od cięŋaru talerzy lub misek, robot moŋe uŋyæ cięŋaru, aby dwukrotnie sprawdziæ, czy ma wģaķciwy przedmiot. Jeķli wymagany jest konkretny kubek, konieczne będzie jego oznaczenie w jakiķ sposób. Kodowanie pasków jest powszechnym schematem stosowanym w tym celu. Ogólnie rzecz biorąc, im większa liczba cech, które moŋna oceniæ, tym dokģadniejsze jest rozpoznawanie obiektu. Rozmiar, ksztaģt, masa (lub waga), wspóģczynnik odbicia ķwiatģa, przepuszczalnoķæ ķwiatģa, tekstura i temperatura to przykģady zmiennych cech charakterystycznych dla przedmiotów codziennego uŋytku.
OCCUPANCY GRID [SIATKA OBĢOŊENIA]
Siatka zajętoķci jest graficznym odwzorowaniem zrobotyzowanego systemu sonaru lub radaru. Obszar objęty radarem lub sonarem jest podzielony na kwadraty, na wzór prostokątnego ukģadu wspóģrzędnych. Następnie kaŋdemu kwadratowi przypisuje się wartoķæ liczbową zgodnie z prawdopodobieņstwem jego zajęcia. Wartoķci te mogą wynosiæ od -1 (100 procent pewnoķci, ŋe kwadrat nie jest zajęty przez obiekt) przez 0 (równe szanse, ŋe kwadrat jest zajęty lub niezajęty) do +1 (100 procent pewnoķci, ŋe kwadrat jest zajęty). Alternatywnie moŋna okreķliæ procentowe prawdopodobieņstwo zajętoķci, od 0 (zdecydowanie nie zajęte) do 100 (zdecydowanie zajęte). Renderowana jako dwuwymiarowa (2-D) figura siatka zajętoķci skģada się z zestawu kwadratów lub prostokątów, z których kaŋdy zawiera cyfrę w ķrodku, reprezentującą prawdopodobieņstwo zajęcia kwadratu. Jednak siatkę zajętoķci moŋna renderowaæ przy uŋyciu kolorów zamiast liczb, jeķli wymagana jest mniejsza dokģadnoķæ. Technikę tę często stosuje się w radarach meteorologicznych lub wyķwietlaczach satelitarnych pokazujących intensywnoķæ opadów, prędkoķæ wiatru, temperatury szczytów chmur lub inne zmienne. Prawdopodobieņstwa obģoŋenia moŋna przypisaæ w następujący sposób: fioletowy = 0-17%; niebieski = 18-33%; zielony = 34-50%; ŋóģty = 51-67%; pomaraņczowy = 68-83%; czerwony = 84-100%. Moŋliwe są dwukierunkowe odwzorowanie siatki obģoŋenia w skali szaroķci. Przykģad pokazano na ilustracji, która przedstawia hipotetyczne ķrodowisko pracy, w którym znajduje się kilka gniazd ptaków. To wykonanie ma osiem odcieni szaroķci. Najciemniejsze odcienie reprezentują najwyŋsze prawdopodobieņstwo, ŋe ptak jest w danym sektorze w danym momencie w czasie. Biaģe regiony reprezentują prawdopodobieņstwo mniejsze niŋ 1/8 (12,5 procent). Siatkę zajętoķci moŋna renderowaæ w trzech wymiarach (3-D), przypisując prawdopodobieņstwa wartoķciom na osi prostopadģej do pģaszczyzny samej siatki. Regiony o najwyŋszym prawdopodobieņstwie pojawiają się zatem jako "wzgórza" lub "góry", zaķ regiony o najniŋszym prawdopodobieņstwie jako "doliny" lub "kaniony".
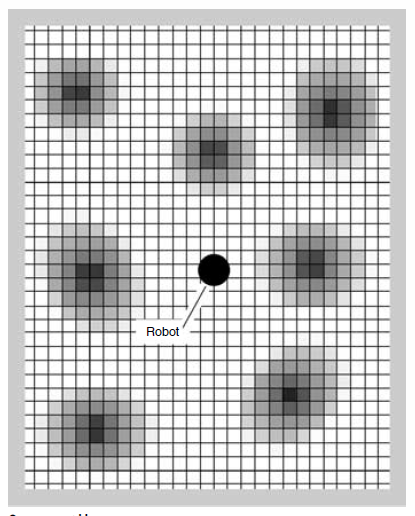
ODOMETRIA
Odometria jest sposobem wykrywania pozycji. Pozwala robotowi ustaliæ, gdzie jest, na podstawie dwóch rzeczy: (1) punktu początkowego i (2) ruchów, które wykonaģ po odejķciu z tego punktu. Wzdģuŋ linii prostej lub w jednym wymiarze odometrię wykonuje wskažnik przebiegu w samochodzie. Przemieszczenie lub przebytą odlegģoķæ okreķla się poprzez zliczenie liczby obrotów koģa w oparciu o okreķlony promieņ koģa. (W przypadku zmiany opon na większe lub mniejsze, naleŋy ponownie ustawiæ licznik kilometrów w samochodzie, aby uzyskaæ dokģadne odczyty.) Przejechana odlegģoķæ jest równa caģce prędkoķci w czasie. Graficznie moŋe to byæ reprezentowane przez obszar pod krzywą, jak pokazano
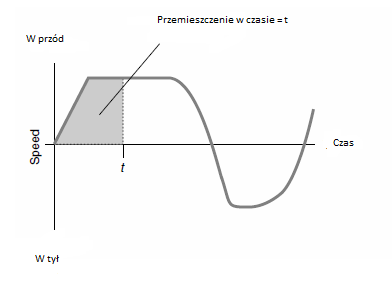
Przemieszczenie zmienia się z prędkoķcią zaleŋną od prędkoķci. Dopóki poruszasz się do przodu, przemieszczenie wzrasta. Jeķli cofniesz się, przemieszczenie maleje. Przemieszczenie moŋe byæ dodatnie lub ujemne w odniesieniu do punktu początkowego. W dwóch wymiarach, powiedzmy w pokoju lub nad powierzchnią Ziemi, odometria odbywa się poprzez utrzymywanie staģej ķcieŋki prędkoķci, która ma skģadniki zarówno prędkoķci, jak i kierunku. Wyobraž sobie pģywanie ģódką na otwartym morzu, zaczynając od wyspy. Znasz szerokoķæ i dģugoķæ geograficzną wyspy; moŋesz stale mierzyæ prędkoķæ i kierunek. Twój komputer ķledzi Twoją prędkoķæ i kierunek od momentu do momentu. Następnie, po jakimkolwiek czasie, komputer moŋe dowiedzieæ się, gdzie jesteķ, na podstawie wczeķniejszych ruchów. Odbywa się to poprzez integrację obu skģadników prędkoķci (prędkoķci i kierunku) jednoczeķnie w czasie. Ŋeglarze znają to jako obliczanie ded (skrót od dedukcji i obliczanie) pozycji. Robot moŋe korzystaæ z funkcji obliczania ded, poniewaŋ mikrokomputer niezaleŋnie integruje prędkoķæ do przodu i kierunek kompasu. Nazywa się to podwójną integracją. Jest to doķæ wyrafinowana forma rachunku róŋniczkowego, ale mikrokomputer moŋna tak zaprogramowaæ, aby robiģ to ģatwo. Ryc. 2 pokazuje dwuwymiarową odometrię opartą na prędkoķci i kierunku kompasu.
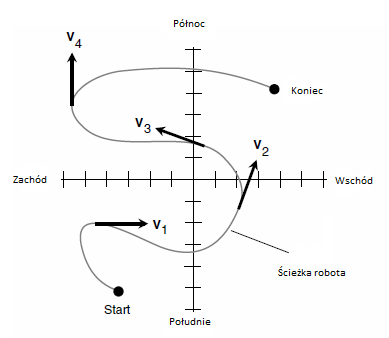
Wektory prędkoķci (V 1 , V 2 , V 3 i V 4 w tym przykģadzie) są stale wejķcie do mikrokomputera. Na podstawie tych informacji mikrokomputer "zna" wspóģrzędne robota w dowolnym momencie.
ODCIĄŊENIE
Mówi się, ŋe maszyna jest czymķ, co uģatwia ludziom pracę. Dotyczy to szczególnie robotów i inteligentnych komputerów. Urządzenia te mogą wykonywaæ wiele ŋmudnych lub niebezpiecznych prac wykonywanych przez ludzi w przeszģoķci. W miarę postępu technologii robotycznej moŋna oczekiwaæ, ŋe proces ten będzie kontynuowany. Zastąpienie pracowników przez roboty i / lub inteligentne komputery nazywa się robotyzacją, automatyzacją lub komputeryzacją. Na poziomie osobistym uŋycie robotów i inteligentnych komputerów do codziennych obowiązków nazywa się odciąŋeniem, terminem wymyķlonym przez futurysty Charlesa Lechta. Wedģug Lechta w naszym ŋyciu jest jeszcze wiele do zrobienia. Nawet w naszym zaawansowanym, wysoce technologicznym spoģeczeņstwie spędzamy czas na zakupach, praniu ubraņ i odkurzaniu podģogi. Zwģaszcza kreatywni ludzie często uwaŋają te rzeczy za stratę czasu. Ale jeķli prace nie zostaną wykonane, ludzie gģodują, noszą brudne ubrania, cierpią z powodu niehigienicznych warunków ŋycia. Niektórzy zatrudniają sģuŋących do wykonywania swoich przyziemnych obowiązków, ale niewielu moŋe sobie pozwoliæ na kamerdynera lub pokojówkę. Roboty mogą przejąæ codzienne obowiązki. Lecht wierzy, ŋe w koņcu to zrobi i będą dostępne dla prawie wszystkich. To pozwoli ludziom robiæ więcej zabawnych i kreatywnych rzeczy, mówi Lecht, malowaæ obrazy, pisaæ ksiąŋki, komponowaæ muzykę lub graæ w golfa.
OPEN-LOOP SYSTEM
Pojęcie systemu otwartej pętli odnosi się do kaŋdej maszyny, która nie zawiera serwomechanizmu. Z tego powodu roboty z otwartą pętlą są często nazywane robotami bezobsģugowymi. Ten typ robota zaleŋy od dokģadnoķci pozycjonowania od wyrównania i precyzji jego częķci. Nie ma sposobu na poprawienie bģędów pozycjonowania. Robot dziaģa na ķlepo; nie moŋe porównaæ swojej lokalizacji ani orientacji z otoczeniem. Systemy z otwartą pętlą mogą dziaģaæ szybciej niŋ systemy z robotami w zamkniętej pętli lub serwo. Wynika to z faktu, ŋe w systemie z otwartą pętlą nie ma sprzęŋenia zwrotnego, a zatem nie jest potrzebny czas na przetwarzanie sygnaģów sprzęŋenia zwrotnego i dokonywanie poprawek pozycjonowania. Systemy z pętlą otwartą są równieŋ taņsze niŋ systemy z pętlą zamkniętą. Jednak w zadaniach wymagających ekstremalnej dokģadnoķci systemy z otwartą pętlą nie są wystarczająco precyzyjne. Jest to szczególnie prawdziwe, gdy robot musi wykonaæ wiele zaprogramowanych ruchów, jeden po drugim. W niektórych typach systemów robotycznych bģędy pozycjonowania kumulują się, chyba ŋe są od czasu do czasu korygowane.
OPTYCZNE ROZPOZNAWANIE ZNAKÓW (OCR)
Komputery mogą tģumaczyæ materiaģy drukowane, takie jak tekst na tej stronie, na dane cyfrowe. Dane moŋna następnie wykorzystaæ w taki sam sposób, jakby ktoķ wpisaģ je na klawiaturze. Odbywa się to za pomocą optycznego rozpoznawania znaków (OCR), specjalistycznej formy skanowania optycznego. W OCR materiaģów drukowanych cienka wiązka laserowa przesuwa się po stronie. Biaģy papier odbija ķwiatģo; czarny tusz nie. Wiązka laserowa porusza się w taki sam sposób, jak wiązka elektronowa w kamerze telewizyjnej lub lampie. Odbita wiązka jest modulowana; to znaczy zmienia się jego intensywnoķæ. Ta modulacja jest tģumaczona przez oprogramowanie OCR na kod cyfrowy do uŋytku przez komputer. W ten sposób komputer moŋe "czytaæ" czasopismo lub ksiąŋkę. OCR jest powszechnie uŋywany przez pisarzy, redaktorów i wydawców do przesyģania drukowanych danych na noķniki cyfrowe, takie jak dysk twardy komputera lub CDROM (pģyta kompaktowa, pamięæ tylko do odczytu). Zaawansowane oprogramowanie OCR rozpoznaje symbole matematyczne i inne egzotyczne notacje, a takŋe duŋe i maģe litery, cyfry i znaki interpunkcyjne. Inteligentne roboty mogą wģączyæ technologię OCR do swoich systemów wizyjnych, umoŋliwiając im odczytywanie etykiet i znaków. Istnieje na przykģad technologia budowy inteligentnego robota z OCR, który moŋe wsiąķæ do samochodu i prowadziæ go w dowolnym miejscu. Byæ moŋe kiedyķ zostanie to zrobione powszechnie. Wģaķciciel robota moŋe przekazaæ robotowi listę zakupów i powiedzieæ: "Proszę, wež te rzeczy w supermarkecie", a robot wróci godzinę póžniej z zamówionymi przedmiotami. Aby robot mógģ odczytaæ coķ na odlegģoķæ, na przykģad znak drogowy, obraz jest obserwowany za pomocą kamery wideo, a nie przez odbijanie zeskanowanej wiązki laserowej od powierzchni. Ten obraz wideo jest następnie przetwarzany przez oprogramowanie OCR na dane cyfrowe.
OPTYCZNY ENKODER
Enkoder optyczny to urządzenie elektroniczne, które mierzy stopieņ, w jakim obraca się waģek mechaniczny. Moŋe takŋe mierzyæ prędkoķæ obrotową (prędkoķæ kątową). Koder optyczny skģada się z pary diod elektroluminescencyjnych (LED), fotodetektora i tarczy do cięcia. Diody LED ķwiecą na fotodetektorze przez koģo tnące. Koģo ma pasma promieniowe, na przemian przezroczyste i nieprzezroczyste (patrz ilustracja). Koģo jest przymocowane do waģu. Gdy waģ się obraca, wiązka ķwiatģa zostaje przerwana. Kaŋde przerwanie uruchamia obwód zliczający. Liczba impulsów jest bezpoķrednią funkcją stopnia, w jakim waģ się obróciģ. Częstotliwoķæ impulsów jest bezpoķrednią funkcją prędkoķci obrotowej. Dwie diody LED, umieszczone we wģaķciwych pozycjach, pozwalają enkoderowi wskazywaæ kierunek (w prawo lub w lewo), w którym obraca się waģ. Enkodery optyczne są uŋywane w róŋnych aplikacjach robotycznych. W szczególnoķci są one stosowane w manipulatorach do pomiaru zakresu obrotu zģącza.
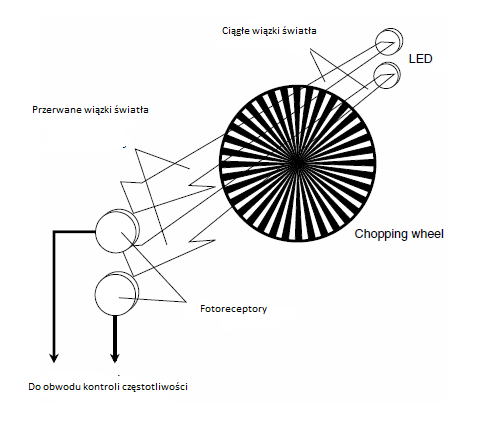
W procesach produkcyjnych często konieczne jest zdejmowanie przedmiotów z przenoķnika taķmowego i umieszczanie ich na specjalnie zaprojektowanej do nich tacy. Taca nazywana jest paletą, a proces jej napeģniania nazywany jest paletyzacją. Odwrotny proces, w którym przedmioty są zdejmowane z palety i umieszczane na przenoķniku, nazywa się depaletyzacją. Aby coķ usunąæ, konieczna jest zģoŋona sekwencja ruchów z przenoķnika, znajdž puste miejsce na palecie i prawidģowo umieķæ przedmiot w wolnym miejscu. Rozwaŋmy paletę z otworami na osiem kwadratowych koģków. Jedna dziura jest wypeģniona; pozostaģe siedem jest wolnych. Zaģóŋmy, ŋe zaprogramowano robota, aby paletyzowaģ koģki, aŋ taca będzie peģna, a następnie wež kolejną tacę i napeģni ją, i tak dalej. Jego instrukcje moŋna prymitywnie przedstawiæ mniej więcej tak:
1. Rozpocznij procedurę paletyzacji.
2. Czy koģki przechodzą wzdģuŋ przenoķnika?
a. Jeķli nie, przejdž do kroku 7.
b. Jeķli tak, przejdž do kroku 3.
3. Czy paleta jest peģna?
a. Jeķli nie, zatrzymaj to.
b. Jeķli tak, zaģaduj ją na cięŋarówkę, wež nową paletę i umieķæ ją na miejscu aby wypeģniæ
4. Wež pierwszy dostępny koģek z przenoķnika.
5. Umieķæ koģek w pustym otworze palety o najniŋszym numerze.
6. Przejdž do kroku 2.
7. Oczekuj dalszych instrukcji
PARALAKSA
Paralaksa to efekt, który pozwala oceniæ odlegģoķci do obiektów i dostrzec gģębię. Roboty z dwuocznym widzeniem maszynowym uŋywają paralaksy w tym samym celu. Ilustracja przedstawia podstawową zasadę. Pobliskie obiekty wydają się przesunięte w stosunku do odlegģego tģa, gdy są oglądane lewym okiem w porównaniu z widokiem widzianym prawym okiem. Zakres przemieszczenia zaleŋy od proporcjonalnej róŋnicy między odlegģoķcią do pobliskiego obiektu a odlegģą skalą odniesienia, a takŋe od odlegģoķci między okiem lewym a okiem prawym. Do nawigacji i wskazówek moŋna uŋyæ paralaksy. Jeķli zmierzasz w kierunku punktu, punkt ten wydaje się nieruchomy, podczas gdy inne obiekty wydają się oddalaæ od niego, co widaæ podczas jazdy pģaską, prostą autostradą. Znaki, drzewa i inne obiekty przydroŋne wydają się przemieszczaæ promieniķcie na zewnątrz z odlegģego punktu na drodze. System wizyjny robota moŋe wykorzystaæ ten efekt do wykrywania kierunku, w którym się porusza, jego prędkoķci i poģoŋenia.
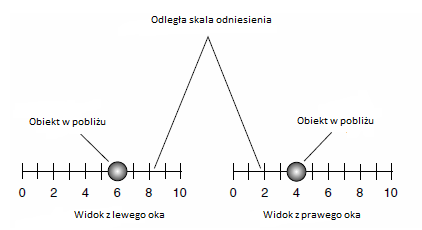
PASYWNY TRANSPONDER
Transponder pasywny to urządzenie, które umoŋliwia robotowi identyfikację obiektu. Przykģadem jest kod kreskowy. Innym przykģadem są etykiety magnetyczne, takie jak te na kartach kredytowych, kartach bankowych w bankomatach i towarach detalicznych. Wszystkie transpondery pasywne wymagają zastosowania czujnika w robocie. Czujnik dekoduje informacje z transpondera. Dane mogą byæ zģoŋone, a transponder niewielki. W niektórych systemach informacje moŋna odczytaæ z odlegģoķci większej niŋ metr. Zaģóŋmy, ŋe robot musi wybraæ wiertģo do okreķlonego zastosowania, a na tacy znajduje się 150 bitów, z których kaŋdy zawiera pasywny transponder z informacjami o jego ķrednicy, twardoķci, zalecanych prędkoķciach roboczych i poģoŋeniu w tacy. Robot moŋe szybko wybraæ najlepszy bit, zainstalowaæ go i uŋywaæ, a po zakoņczeniu pracy moŋna go odģoŋyæ na wģaķciwe miejsce.
PATTERN RECOGNITION [ROZPOZNAWANIE WZORCÓW]
W systemie wizyjnym robota jednym ze sposobów identyfikacji obiektu lub dekodowania danych jest ksztaģt. Kod kreskowy jest typowym przykģadem. Skanowanie optyczne to kolejny. Maszyna rozpoznaje kombinacje ksztaģtów i wydedukuje ich znaczenie za pomocą mikrokomputera. W robotach inteligentnych technologia rozpoznawania wzorców zyskuje na znaczeniu. Naukowcy czasami wykorzystują problemy Bongarda do udoskonalania systemów rozpoznawania wzorców. Wyobraž sobie osobistego robota, którego trzymasz w domu. Moŋe Cię zidentyfikowaæ na podstawie kombinacji cech, takich jak wzrost, kolor wģosów, kolor oczu, modulacja gģosu i akcent gģosu. Byæ moŋe Twój osobisty robot moŋe natychmiast rozpoznaæ Twoją twarz, tak jak robią to Twoi znajomi. Ta technologia istnieje, ale wymaga znacznej mocy obliczeniowej, a koszt jest wysoki. Istnieją prostsze sposoby identyfikacji ludzi. Zaģóŋmy, ŋe Twój robot jest zaprogramowany tak, aby uķcisnąæ dģoņ kaŋdemu, kto wejdzie do domu. W ten sposób robot pobiera odciski palców osoby. Przechowuje zbiór autoryzowanych odcisków palców. Jeķli ktoķ odmówi podania ręki, robot moŋe uruchomiæ cichy alarm, aby wezwaæ policyjne roboty. To samo moŋe się zdarzyæ, jeķli robot rozpozna odcisk osoby, która potrząsa ręką. To hipotetyczny i raczej orwellowski scenariusz; wiele osób wolaģoby nie wchodziæ do tak wyposaŋonego domu. Jednak sam ten fakt mógģby prawdopodobnie sģuŋyæ jako wzmocnienie bezpieczeņstwa.
PERSONAL ROBOT
Od wieków ludzie wyobraŋali sobie posiadanie osobistego robota. Taka maszyna mogģa byæ czymķ w rodzaju niewolnika, nie ŋądającego zapģaty (z wyjątkiem kosztów utrzymania). Jednak aŋ do eksplozji technologii elektronicznej próby budowania robotów przez ludzi koņczyģy się niezgrabnymi masami metalu, które niewiele lub wcale nie miaģy ŋadnego rzeczywistego zastosowania.
Cechy
Roboty osobiste mogą wykonywaæ wszelkiego rodzaju przyziemne prace domowe. Takie roboty nazywane są czasami robotami domowymi. W biurze moŋna uŋywaæ robotów osobistych; nazywane są robotami usģugowymi. Aby byæ efektywnym, roboty osobiste muszą zawieraæ takie funkcje, jak rozpoznawanie mowy, synteza mowy, rozpoznawanie obiektów i system wizyjny. Obowiązki robota domowego mogą obejmowaæ:
• Myjnia samochodowa
• Generalne sprzątanie
• Towarzystwo
• Gotowanie
• Zmywanie naczyņ
• Ochrona przeciwpoŋarowa
• Czyszczenie podģóg
• Zakupy spoŋywcze
• Wykrywanie wtargnięæ
• Pralnia
• Koszenie trawnika
• Konserwacja
• Podawanie posiģków
• towarzysz zabaw dziecka
• Usuwanie ķniegu
• Czyszczenie toalet
• Mycie okien
W biurze robot usģugowy moŋe wykonywaæ takie czynnoķci, jak:
• Księgowoķæ
• Generalne sprzątanie
• Przygotowanie i podawanie kawy
• Dostawa
• Dyktowanie
• Konserwacji sprzętu
• Wypeģnianie dokumentów
• Ochrona przeciwpoŋarowa
• Czyszczenie podģóg
• Powitanie goķci
• Wykrywanie wtargnięæ
• Przygotowanie posiģku
• Ksero
• Odpowiadanie na telefon
• Czyszczenie toalet
• Pisanie
• Mycie okien
Praktyczne roboty kontra zabawki
Niektóre roboty osobiste zostaģy zaprojektowane i sprzedane, ale do niedawna nie byģy na tyle wyrafinowane, aby przynosiæ jakiekolwiek praktyczne korzyķci. Większoķæ takich robotów bardziej trafnie nazywa się robotami hobbystycznymi. Dobry robot domowy, zdolny do sprawnego i niezawodnego wykonania nawet kilku z powyŋszych prac, przekracza moŋliwoķci finansowe zwykģych ludzi. Wraz z poprawą technologii i jej obniŋeniem koszt (w kategoriach rzeczywistych moŋliwoķci zarobkowych danej osoby) będzie spadaģ. Prostsze maszyny to dobre zabawki dla dzieci. Co ciekawe, jeķli robot jest zaprojektowany i przeznaczony jako zabawka, często sprzedaje się lepiej, niŋ gdyby byģ reklamowany jako praktyczna maszyna.
Pytania i obawy
Roboty muszą byæ bezpieczne do ŋycia w pobliŋu i nie mogą stanowiæ dla nich ŋadnego zagroŋenia wģaķciciela, zwģaszcza dzieci. Moŋna to zapewniæ dzięki dobremu projektowi. Wszystkie roboty powinny dziaģaæ zgodnie z trzema prawami Asimova. Zaģóŋmy, ŋe dostępny jest praktyczny robot osobisty za mniej więcej taką samą cenę, jak dobry samochód. Czy wielu ludzi by to kupiģo? Trudno to przewidzieæ. Choæ niektóre z wyŋej wymienionych zadaņ mogą się wydawaæ nudne, wiele osób lubi je wykonywaæ. Koszenie trawnika i odķnieŋanie moŋe byæ dobrym æwiczeniem. Wiele osób lubi gotowaæ. Niektórzy ludzie nigdy nie powierzą robotowi prawidģowego wykonania zadaņ, bez względu na to, jak wydajne i wyrafinowane mogą byæ te maszyny. Niektórzy ludzie wolą oszczędzaæ lub inwestowaæ pieniądze, które mogliby wydaæ na osobistego robota.
PHONEME [FONEM]
Fonem to indywidualny džwięk lub sylaba, którą wydajesz podczas mówienia. Przykģady to "ssss", "oooo" i "ffff". Gģos moŋna wyķwietliæ na ekranie oscyloskopu. Sprzęt jest prosty: mikrofon, wzmacniacz audio i oscyloskop. Kiedy ktoķ mówi do mikrofonu, na ekranie taņczy plątanina. Wygląd fonemów jest prostszy niŋ zwykģa mowa. Kaŋdy przebieg, bez względu na to, jak zģoŋony, moŋe zostaæ rozpoznany lub wygenerowany przez obwody elektroniczne. Teoretycznie syntezator mowy moŋe brzmieæ dokģadnie tak, jak czyjeķ gģos, mówiąc cokolwiek, z dowolną modulacją. Sygnaģ wyjķciowy takiej maszyny ma dokģadnie taki sam ksztaģt fali, jak widziany na oscyloskopie, co gģos konkretnej osoby mówiącej. Odbite ķwiatģo moŋe pomóc robotowi stwierdziæ, czy się do czegoķ zbliŋa. Fotoelektryczny czujnik zbliŋeniowy wykorzystuje modulowany generator wiązki ķwiatģa, fotodetektor, wzmacniacz czuģy na częstotliwoķæ i mikrokomputer. Ilustracja przedstawia zasadę dziaģania tego urządzenia. Wiązka ķwiatģa odbija się od obiektu i jest wychwytywana przez fotodetektor. Wiązka ķwiatģa jest modulowana z pewną częstotliwoķcią, powiedzmy 1000 Hz (herców), a detektor posiada wzmacniacz, który reaguje tylko na ķwiatģo modulowane przy tej częstotliwoķci. Zapobiega to faģszywym obrazom, które w przeciwnym razie mogģyby byæ spowodowane rozproszonym oķwietleniem, takim jak lampy lub ķwiatģo sģoneczne. Jeķli robot zbliŋa się do obiektu, mikrokomputer wyczuwa, ŋe odbita wiązka jest coraz silniejsza. Robot moŋe wtedy omijaæ obiekt. Ta metoda wykrywania bliskoķci nie dziaģa w przypadku czarnych lub bardzo ciemnych obiektów lub pģaskich okien lub luster ustawionych pod ostrym kątem. Tego rodzaju obiekty zwodzą ten system, poniewaŋ wiązka ķwiatģa nie jest odbijana z powrotem w kierunku fotodetektora.
PHOTOELECTRIC PROXIMITY SENSOR [FOTOELEKTRYCZNY CZUJNIK ZBLIŊENIOWY]
Odbite ķwiatģo moŋe pomóc robotowi stwierdziæ, czy się zbliŋa do czegoķ. Fotoelektryczny czujnik zbliŋeniowy wykorzystuje modulowany generator wiązki ķwiatģa, fotodetektor, wzmacniacz czuģy na częstotliwoķæ i mikrokomputer. Ilustracja przedstawia zasadę dziaģania tego urządzenia. Wiązka ķwiatģa odbija się od obiektu i jest wychwytywana przez fotodetektor. Wiązka ķwiatģa jest modulowana z pewną częstotliwoķcią, powiedzmy 1000 Hz (herców), a detektor posiada wzmacniacz, który reaguje tylko na ķwiatģo modulowane przy tej częstotliwoķci. Zapobiega to faģszywym obrazom, które w przeciwnym razie mogģyby byæ spowodowane rozproszonym oķwietleniem, takim jak lampy lub ķwiatģo sģoneczne. Jeķli robot zbliŋa się do obiektu, mikrokomputer wyczuwa, ŋe odbita wiązka jest coraz silniejsza. Robot moŋe wtedy omijaæ obiekt. Ta metoda wykrywania bliskoķci nie dziaģa w przypadku czarnych lub bardzo ciemnych obiektów lub pģaskich okien lub luster ustawionych pod ostrym kątem. Tego rodzaju obiekty zwodzą ten system, poniewaŋ wiązka ķwiatģa nie jest odbijana z powrotem w kierunku fotodetektora.
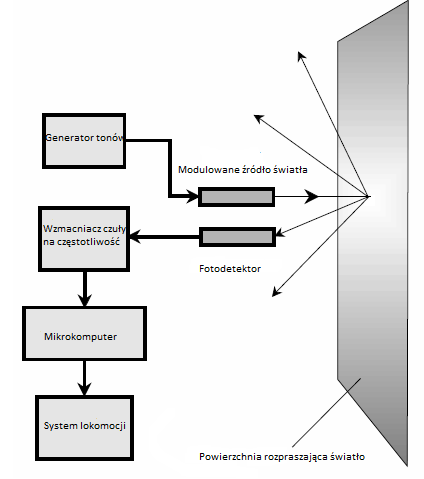
PRZETWORNIK PIEZOELEKTRYCZNY
Przetwornik piezoelektryczny to urządzenie, które moŋe przeksztaģciæ fale akustyczne w impulsy elektryczne i odwrotnie. Skģada się z krysztaģu, takiego jak kwarc lub materiaģ ceramiczny, umieszczonego pomiędzy dwiema metalowymi pģytami, jak pokazano na ilustracji na stronie 226. Kiedy fala akustyczna uderza w jedną lub obie pģytki, metal wibruje. Ta wibracja jest przenoszona na krysztaģ. Krysztaģ wytwarza sģabe prądy elektryczne, gdy jest poddawany napręŋeniom mechanicznym. Dlatego między dwiema metalowymi pģytami powstaje napięcie prądu przemiennego (AC) o przebiegu podobnym do fal džwiękowych. Jeķli do pģytek zostanie przyģoŋony sygnaģ prądu przemiennego, krysztaģ wibruje "w synchronizacji" z prądem. W rezultacie metalowe pģytki równieŋ wibrują, powodując zakģócenia akustyczne. Przetworniki piezoelektryczne są powszechne w zastosowaniach ultradžwiękowych, takich jak czujniki wtargnięcia i alarmy. Są przydatne w robotach, poniewaŋ są maģe, lekkie i wymagają niewielkiego prądu do swojej pracy. Są wraŋliwe i mogą funkcjonowaæ pod wodą
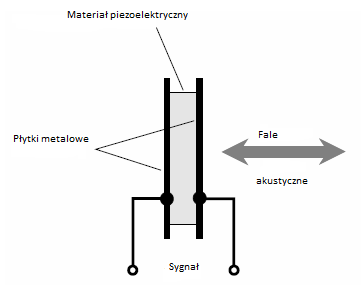
PITCH [SKOK]
Skok jest jednym z trzech rodzajów ruchu, jakie moŋe wykonaæ robotyczny efektor. Dotyczy to takŋe zmian postawy (orientacji) robota mobilnego w trzech wymiarach. Wysokoķæ džwięku jest zwykle zmienną w górę iw dóģ. Wyciągnij rękę prosto i wskaŋ coķ palcem wskazującym, a następnie przesuņ nadgarstek tak, aby palec wskazujący wskazywaģ w górę iw dóģ wzdģuŋ pionowej linii. Ten ruch to skok w twoim nadgarstku.
PIKSEL
Piksel to akronim oznaczający "picture (pix) element". Piksel to najmniejszy region na dwuwymiarowym (2-D) obrazie wideo lub wyķwietlaczu. W zģoŋonym sygnale wideo piksel jest najmniejszą jednostką przekazującą informacje. Te piksele czasami, ale nie zawsze, pokrywają się z pikselami na wyķwietlaczu po stronie odbiorczej obwodu. Jeķli spojrzysz przez lupę z bliska na ekran telewizora lub monitor komputera, zobaczysz tysiące maģych kropek. Są to piksele samego ekranu telewizora lub monitora. (Uwaga: jeķli spróbujesz tego eksperymentu, zaģóŋ ltrafioletowe okulary przeciwsģoneczne). Na obrazach w skali szaroķci kaŋdemu pikselowi przypisany jest okreķlony blask. W obrazie kolorowym kaŋdemu pikselowi przypisany jest kolor podstawowy (czerwony, zielony lub niebieski) oraz okreķlony blask. Rozmiar piksela jest waŋny w zrobotyzowanych systemach wizyjnych, poniewaŋ decyduje o ostatecznej rozdzielczoķci obrazu, czyli o tym, ile szczegóģów moŋe zobaczyæ robot. Im mniejsze piksele, tym lepsza rozdzielczoķæ. Wizja robota o wysokiej rozdzielczoķci wymaga lepszych kamer, większej przepustowoķci sygnaģu i większej iloķci pamięci niŋ wizja robota o niskiej rozdzielczoķci. Systemy o wysokiej rozdzielczoķci równieŋ kosztują więcej niŋ systemy o niskiej rozdzielczoķci.
PNEUMATYCZNY NAPĘD
Napęd pneumatyczny to metoda zapewniania ruchu manipulatorowi robota. Wykorzystuje spręŋony gaz, taki jak powietrze, do przenoszenia siģ na róŋne przeguby, sekcje teleskopowe i efektory koņcowe. Napęd pneumatyczny skģada się z zasilacza, co najmniej jednego silnika, zespoģu tģoków i zaworów oraz pętli sprzęŋenia zwrotnego. Zawory i tģoki kontrolują ruch gazu. Poniewaŋ gaz jest ķciķliwy, napęd nie moŋe przekazywaæ duŋych siģ bez znacznych bģędów pozycjonowania. Pętla sprzęŋenia zwrotnego skģada się z co najmniej jednego czujnika siģy, który moŋe zapewniæ korekcję bģędów i pomóc manipulatorowi podąŋaæ wyznaczoną ķcieŋką. Manipulatory napędzane pneumatycznie są uŋywane, gdy precyzja i prędkoķæ nie są krytyczne.
PUNKT DO PUNKTU RUCH
Niektóre ramiona robotów poruszają się w sposób ciągģy i mogą się zatrzymaæ w dowolnym punkcie ķcieŋki. Inni są w stanie zatrzymaæ się tylko w okreķlonych miejscach. Kiedy efektor koņcowy ramienia robota moŋe osiągnąæ tylko okreķlone pozycje, mówi się, ŋe manipulator wykonuje ruch punkt-punkt. Ilustracja przedstawia ruch punkt-punkt, w którym moŋliwych jest szeķæ punktów zatrzymania, nazywanych punktami przelotowymi (od A do F). W niektórych robotach, które wykorzystują ruch punkt-punkt, kontroler przechowuje duŋą liczbę punktów przelotowych w obwiedni roboczej manipulatora. Punkty te są tak blisko siebie, ŋe wynikający z nich ruch jest ciągģy ze względów praktycznych. Stosowane są maģe przyrosty czasu, takie jak 0,01 s lub 0,001 s. Ten schemat jest analogiem ruchu robota w grafice komputerowej z mapami bitowymi.
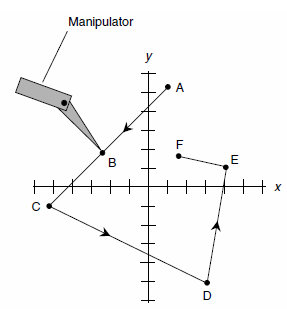
POLAR COORDINATE GEOMETRY [GEOMETRIA WSPÓĢRZĘDNYCH POLARNYCH]
Ramiona robotów przemysģowych mogą poruszaæ się na róŋne sposoby, w zaleŋnoķci od ich przeznaczenia. Geometria wspóģrzędnych biegunowych to powszechny ukģad dwuwymiarowy (2-D). Termin ten pochodzi z wykresu biegunowego funkcji matematycznych. Rysunki przedstawiają standardowe ukģady wspóģrzędnych biegunowych. Zmienna niezaleŋna to kąt w stopniach lub radianach względem zdefiniowanej linii zerowej. Istnieją dwie popularne metody okreķlania kąta. Jeķli linia zerowa biegnie w prawo ("wschód"), wówczas kąt jest mierzony od niej w kierunku przeciwnym do ruchu wskazówek zegara. Jeķli linia zerowa biegnie w górę ("póģnoc"), wówczas kąt jest mierzony od niej zgodnie z ruchem wskazówek zegara. Pierwszy schemat jest wspólny dla wyķwietlaczy matematycznych i niektórych manipulatorów robotów. Druga metoda jest uŋywana, gdy kąt jest namiarem kompasu lub azymutem, jak w systemach nawigacyjnych. Zmienną zaleŋną jest promieņ lub odlegģoķæ od ķrodka wykresu. Jednostki mają zwykle ten sam rozmiar na wykresie o podanych wspóģrzędnych (na przykģad milimetry). W niektórych przypadkach uŋywana jest logarytmiczna skala promienia. Jest to często wykonywane podczas kreķlenia wzorców kierunkowych przetwornika.

POLICYJNY ROBOT
Czy moŋesz sobie wyobraziæ funkcjonariuszy policji z metalu i krzemu, o wysokoķci 2 m, którzy potrafią podnoszących caģych samochodów jednym ramieniem i jednoczesne strzelanie 100 pocisków na sekundę z efektora koņcowego na drugim ramieniu? Te typy robotów policyjnych zostaģy przedstawione w fikcji. Technologia pozwalająca na zbudowanie takiej maszyny istnieje juŋ teraz, jednak kiedy i jeķli w rzeczywistoķci powstanie na duŋą skalę roboty policyjne, prawdopodobnie będą mniej rewelacyjne. Policjanci są często naraŋeni na niebezpieczeņstwo. Gdyby zdalnie sterowany robot mógģ zostaæ uŋyty do któregokolwiek z niebezpiecznych zadaņ, przed którymi stają gliniarze, moŋna by uratowaæ ŋycie. Takie jest uzasadnienie rozmieszczania robotów w miejsce ludzkich oficerów. Funkcjonariusz policji-robota moŋe dziaģaæ jak robot-ŋoģnierz lub dron. To mogģoby byæ teleoperowane, z czģowiekiem stacjonującym w centralnym miejscu, nie naraŋonym na ryzyko. Z pewnoķcią mechaniczny policjant mógģby byæ znacznie silniejszym niŋ jakikolwiek czģowiek. Ponadto maszyna nie boi się ķmierci i moŋe podejmowaæ ryzyko, od którego ludzie mogą się wycofaæ. Ludzie mogą manewrowaæ fizycznie w sposób, którego ŋadna maszyna nie moŋe dorównaæ. Sprytny zģodziejaszek prawdopodobnie umknąģby prawie kaŋdemu robotowi-policjantowi. Zwinnoķæ będzie kluczowym problemem, jeķli policjant-robot ma kiedykolwiek kogoķ zatrzymaæ. Sama siģa liczb moŋe rozwiązaæ ten problem. Byæ moŋe duŋa rójka maģych gliniarzy-robotów-owadów, rozmieszczonych strategicznie, mogģaby namierzyæ i zģapaæ uciekającego podejrzanego. Wyrafinowani, autonomiczni funkcjonariusze policji robotów mogą nie okazaæ się opģacalni. Czģowiek-operator musi otrzymywaæ wynagrodzenie za siedzenie i zdalne sterowanie robotem. Sam robot będzie kosztowaģ koszty budowy i utrzymania, a jeķli to konieczne, naprawy lub wymiany. Ludzie, którzy zrobotyzują policję, będą musieli porównaæ ratowanie ŋycia ze zwiększonymi kosztami. Byæ moŋe koszt technologii robotycznej spadnie, a jakoķæ wzroķnie, aŋ pewnego dnia częķæ lub większoķæ naszych metropolitalnych siģ policyjnych będzie mogģa zostaæ zrobotyzowana po rozsądnych kosztach.
POLIMORFICZNY ROBOT
Robot polimorficzny, zwany takŋe robotem zmieniającym ksztaģt, jest zaprojektowany tak, aby dostosowywaæ się do otoczenia poprzez zmianę jego geometrii. Istnieje wiele projektów, które mogą to osiągnąæ. Prostym przykģadem polimorficznego chwytaka robota jest aktywny mechanizm cięciwy, który dopasowuje się do obiektów poprzez owijanie się wokóģ nich. Specjalistyczne roboty gąsienicowe mogą zmieniaæ swój ksztaģt, aby podróŋowaæ po nierównym terenie lub wspinaæ się i schodziæ po schodach. Takie roboty mogą równieŋ zmieniaæ orientację ciaģa (poziomą lub pionową). Niektóre roboty mają ksztaģt węŋy i mają liczne przeguby, które pozwalają im manewrowaæ i sięgaæ do zģoŋonych przestrzeni roboczych.
POZYCJI WYKRYWANIE
Wykrywanie pozycji robota naleŋy do jednej z dwóch kategorii. W większym sensie, robot moŋe się zlokalizowaæ. Jest to waŋne podczas prowadzenia i nawigacji. W mniejszym sensie częķæ robota moŋe przemieķciæ się do miejsca w jego obszarze roboczym za pomocą urządzeņ, które mówią mu dokģadnie, gdzie się znajduje.
POTENCJALNE POLE
Potencjalne pole to odwzorowanie zachowania lub charakterystyki robota w okreķlonym obszarze roboczym. Takie pola są zwykle renderowane jako tablice wektorowe w dwuwymiarowym (2-D) ukģadzie wspóģrzędnych. Wektory mogą reprezentowaæ dowolną wielkoķæ, która ma wpģyw na robota lub jaką wykazuje robot, na przykģad siģa pola magnetycznego, prędkoķæ lub przyspieszenie. Bardziej zģoŋone pola potencjaģów istnieją w przestrzeni trójwymiarowej (3-D). Poniŋsze przykģady i doģączone ilustracje dotyczą przestrzeni 2-D (pģaskiej powierzchni) dla uproszczenia.
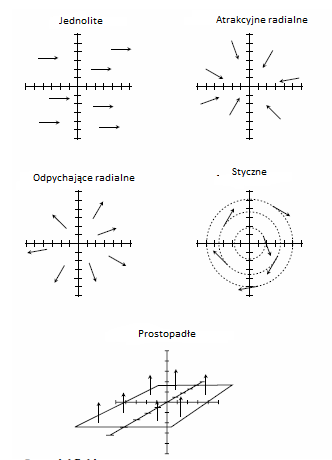
Jednolite pole
W jednolitym potencjalnym polu wszystkie wektory wskazują ten sam kierunek i mają tę samą wielkoķæ, niezaleŋnie od lokalizacji robota. Wszystkie wektory są skierowane równolegle do powierzchni roboczej, czego przykģadem jest staģy wiatr dziaģający na robota. Innym przykģadem jest pole magnetyczne Ziemi w przestrzeni roboczej, która obejmuje tylko niewielką częķæ powierzchni planety (na przykģad kilka kilometrów kwadratowych) i która znajduje się w pobliŋu równika geomagnetycznego, gdzie linie strumienia są równolegģe do powierzchni .
Atrakcyjne pole radialne
Atrakcyjne pole potencjaģu radialnego zawiera wektory, które wszystkie wskazują do wewnątrz w kierunku początku lub punktu ķrodkowego, reprezentowanego przez (0, 0) w ukģadzie wspóģrzędnych kartezjaņskich. Wielkoķæ wektora moŋe zaleŋeæ od odlegģoķci od žródģa, ale niekoniecznie. Przykģadem atrakcyjnego pola promieniowego jest odwzorowanie siģy, która istnieje, gdy robot przenoszący ģadunek elektrycznie dodatni dziaģa w pobliŋu obiektu niosącego elektrycznie ujemny ģadunek. opģata. W tym przypadku intensywnoķæ wektora roķnie wraz ze zmniejszaniem się odlegģoķci między robotem a punktem początkowym.
Odpychające pole radialne
Odpychające promieniowe pole potencjaģu zawiera wektory, które wszystkie skierowane są na zewnątrz od žródģa. Podobnie jak w przypadku pola przyciągającego wielkoķæ wektora moŋe zaleŋeæ od odlegģoķci od žródģa, ale niekoniecznie. Przykģadem odpychającego pola radialnego jest odwzorowanie siģy, która występuje, gdy robot niosący dodatni ģadunek elektryczny dziaģa w pobliŋu obiektu posiadającego dodatni ģadunek elektryczny (czyli o takiej samej biegunowoķci jak robot). W tym przypadku intensywnoķæ wektora roķnie wraz ze zmniejszaniem się odlegģoķci między robotem a punktem początkowym.
Pole styczne
Pole potencjaģu stycznego zawiera wektory, które wskazują zgodnie lub przeciwnie do ruchu wskazówek zegara w koncentrycznych okręgach wokóģ początku. Wielkoķæ wektora moŋe się róŋniæ w zaleŋnoķci od odlegģoķci od žródģa, ale niekoniecznie. Przykģadem tego typu pola jest cyrkulacja wiatru wokóģ intensywnego tropikalnego huraganu. Innym przykģadem jest strumieņ magnetyczny otaczający prosty drut przewodzący staģy, staģy prąd, gdy drut przechodzi przez dwuwymiarową powierzchnię roboczą pod kątem prostym. W obu tych przypadkach intensywnoķæ wektora roķnie wraz ze zmniejszaniem się odlegģoķci między robotem a punktem początkowym.
Pole prostopadģe
W prostopadģym polu potencjalnym, zwanym takŋe ortogonalnym polem potencjalnym, wszystkie wektory wskazują ten sam kierunek i mają tę samą wielkoķæ, niezaleŋnie od lokalizacji robota. Wszystkie wektory są skierowane pod kątem prostym do powierzchni roboczej. Przykģadem tego rodzaju pola jest pole magnetyczne Ziemi w bezpoķrednim sąsiedztwie któregokolwiek z biegunów geomagnetycznych. Innym przykģadem jest mapowanie siģy, która występuje, gdy robot przenoszący ģadunek elektryczny dziaģa na powierzchni roboczej, która równieŋ przenosi ģadunek elektryczny. Jeķli robot i powierzchnia mają podobne ģadunki, siģa jest odpychająca (wszystkie wektory są skierowane prosto do góry); jeķli robot i powierzchnia mają przeciwne ģadunki, siģa jest atrakcyjna (wszystkie wektory są skierowane prosto w dóģ).
POWER SUPPLY [ZASILACZ]
Zasilacz to obwód, który dostarcza urządzeniu elektronicznemu napięcie i prąd potrzebne do prawidģowego dziaģania. Zasilanie z typowego gniazda sieciowego skģada się z prądu przemiennego (AC) o wartoķci okoģo 117 V. Większoķæ urządzeņ elektronicznych wymaga prądu staģego (DC). Rysunek 1 to schemat blokowy pokazujący etapy w typowym zasilaczu DC. Stopnie obejmują transformator, prostownik, filtr i regulator napięcia.
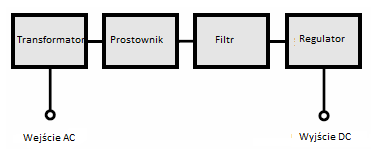
Transformator
Transformatory zasilające są dostępne w dwóch typach: transformator obniŋający napięcie, który przeksztaģca prąd przemienny na niŋsze napięcie oraz transformator podwyŋszający napięcie, który przeksztaģca prąd przemienny na wyŋsze napięcie. Zilustrowano je schematycznie na rys. 2. Większoķæ elektronicznych urządzeņ póģprzewodnikowych, takich jak sterowniki robotów i maģe silniki robotów, potrzebuje tylko kilku woltów. W zasilaczach takich urządzeņ stosowane są transformatory obniŋające napięcie. Fizyczny rozmiar transformatora zaleŋy od prądu.
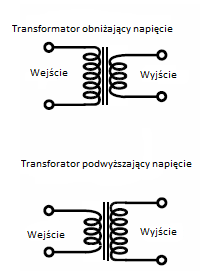
Niektóre obwody wymagają wysokiego napięcia (powyŋej 117 V DC). Wyķwietlacz wideo z lampą elektronopromieniową (CRT) potrzebuje kilkuset woltów. Transformatory w tych urządzeniach są typu podwyŋszanego.
Prostownik
Najprostszy obwód prostownika, zwany prostownikiem póģfalowym, wykorzystuje jedną diodę do "odcięcia" poģowy cyklu wejķciowego AC. Prostowanie póģfalowe jest przydatne w zasilaniach, które nie muszą dostarczaæ duŋego prądu lub które nie wymagają szczególnie dobrej regulacji. W przypadku urządzeņ wysokoprądowych preferowany jest prostownik peģnookresowy. Schemat peģnofalowy jest równieŋ lepszy, gdy potrzebna jest dobra regulacja napięcia. Obwód ten wykorzystuje obie poģowy cyklu prądu przemiennego do wyprowadzenia prądu staģego. Istnieją dwa podstawowe obwody zasilania peģnookresowego. Jedna wersja wykorzystuje ķrodkowy zaczep w transformatorze i wymaga dwóch diod. Drugi obwód wykorzystuje cztery diody i nie wymaga transformatora z centralnym zaczepem. Obwody póģfalowe, peģnookresowe centralne i prostownik mostkowy przedstawiono schematycznie tu.
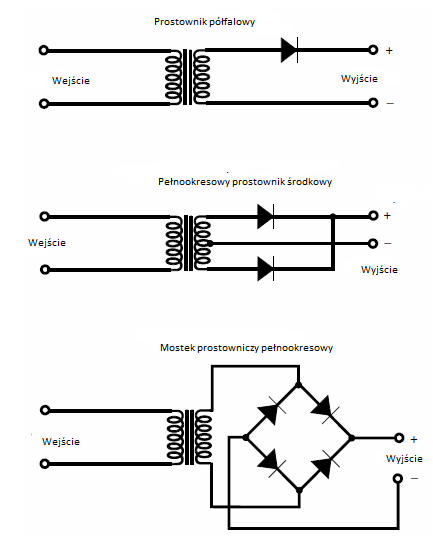
Filtr
Sprzęt elektroniczny generalnie nie dziaģa dobrze z pulsującym prądem staģym pochodzącym bezpoķrednio z prostownika. Tętnienie przebiegu musi zostaæ wygģadzone, aby dostarczany byģ czysty, podobny do baterii prąd staģy. Robi to obwód filtra. Najprostszym moŋliwym filtrem jest jeden lub więcej kondensatorów o duŋej wartoķci, poģączonych równolegle z wyjķciem prostownika. Stosowane są kondensatory elektrolityczne lub tantalowe. Czasami cewka o duŋej wartoķci, zwana dģawikiem filtrującym, jest poģączona szeregowo oprócz kondensatora równolegle. Zapewnia to pģynniejsze wyjķcie DC niŋ sam kondensator. Dwa przykģady filtrów indukcyjnoķci / pojemnoķci pokazano tu.
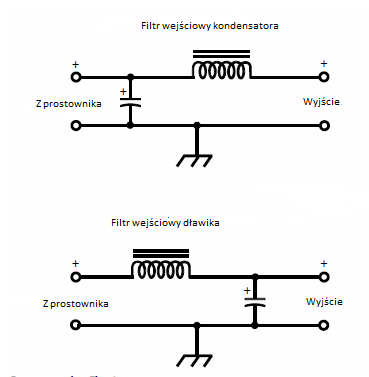
Regulator napięcia
Jeķli specjalny rodzaj diody, zwany diodą Zenera, zostanie podģączony równolegle do wyjķcia zasilacza, dioda ograniczy napięcie wyjķciowe zasilacza tak dģugo, jak dģugo dioda będzie miaģa wystarczająco wysoką moc znamionową. Napięcie ograniczające zaleŋy od zastosowanej diody Zenera. Istnieją diody Zenera pasujące do kaŋdego rozsądnego napięcia zasilania. Kiedy zasilacz musi dostarczaæ wysoki prąd, tranzystor mocy jest uŋywany wraz z diodą Zenera w celu uzyskania regulacji. Schemat obwodu takiego schematu pokazano na ryc.5. W ostatnich latach regulatory napięcia staģy się dostępne w postaci ukģadów scalonych (IC). Taki ukģad scalony, czasem wraz z zewnętrznymi komponentami, jest instalowany w obwodzie zasilającym na wyjķciu filtra. Zapewnia to doskonaģą regulację przy niskich i ķrednich napięciach.
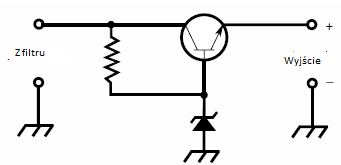
Stany nieustalone i skoki
AC na linii zasilającej nie ma czystego, idealnego, staģego ksztaģtu fali. Czasami występują "skoki" zwane przejķciami. Trwają one tylko przez kilka mikrosekund, ale mogą osiągnąæ wartoķci szczytowe przekraczające 1000 V. Skoki napięcia równieŋ mogą stanowiæ problem. W przypadku gwaģtownego wzrostu napięcie roķnie nieco powyŋej normy na okoģo póģ sekundy. Bez ochrony przed skutkami stanów nieustalonych i przepięæ wraŋliwy sprzęt elektroniczny, taki jak sterowniki robotów, moŋe dziaģaæ nieprawidģowo. Najprostszym sposobem na pozbycie się większoķci stanów nieustalonych i przepięæ jest uŋycie komercyjnie produkowanego tģumika przejķciowego, zwanego równieŋ tģumikiem przepięæ. Bardziej wyrafinowanym urządzeniem przetwarzającym energię jest zasilacz bezprzerwowy (UPS). Są one zalecane dla powaŋnych uŋytkowników komputerów, poniewaŋ mogą zapobiec problemom, które w przeciwnym razie wynikaģyby z zaniku napięcia i przerw w zasilaniu, a takŋe wyeliminowaæ skutki stanów nieustalonych i przepięæ.
Bezpieczniki i wyģączniki
Jeķli przepali się bezpiecznik, naleŋy go wymieniæ na inny o tej samej wartoķci. Jeķli nowy bezpiecznik ma zbyt niski prąd, prawdopodobnie przepali się natychmiast lub wkrótce po zainstalowaniu. Jeķli nowy bezpiecznik ma zbyt wysoki prąd znamionowy, moŋe nie chroniæ sprzętu. Wyģączniki automatyczne dziaģają tak samo, jak bezpieczniki, z tym wyjątkiem, ŋe wyģącznik moŋna zresetowaæ, wyģączając zasilanie, odczekając chwilę, a następnie naciskając przycisk lub przestawiając przeģącznik. Niektóre wyģączniki resetują się automatycznie po wyģączeniu sprzętu na okreķlony czas. Kwestie bezpieczeņstwa Zasilacze mogą byæ niebezpieczne. Dotyczy to zwģaszcza obwodów wysokiego napięcia, ale wszystko powyŋej 12 V powinno byæ traktowane jako potencjalnie ķmiertelne. We wszystkich urządzeniach elektronicznych zasilanych prądem przemiennym występuje wysokie napięcie na wejķciu do žródģa zasilania (gdzie pojawia się 117 V). Wyķwietlacz CRT ma wysokie napięcie, które steruje jego odchylającymi cewkami. Zasilanie niekoniecznie jest bezpieczne po wyģączeniu. Kondensatory filtrujące utrzymują ģadunek przez dģugi czas. W dobrze zaprojektowanych zasilaczach wysokonapięciowych rezystory upustowe są podģączone do kaŋdego kondensatora filtrującego, więc kondensatory rozģadują się w ciągu kilku minut po wyģączeniu zasilania. Ale nie zakģadaj ŋycia na komponenty, które mogą nie istnieæ w częķci sprzętu, a które czasami mogą zawieķæ, nawet jeķli są dostarczone. Jeķli masz jakiekolwiek wątpliwoķci co do moŋliwoķci naprawy zasilacza, zostaw to profesjonaliķcie.
PRESENCE SENSING [WYKRYWANIE OBECNOĶCI]
Wykrywanie obecnoķci to zdolnoķæ robota lub innej maszyny do wykrywania wprowadzenia obiektu do otoczenia. Takie urządzenie moŋe wykorzystywaæ zderzaki, wąsy, czujniki ķwiatģa widzialnego, podczerwieni (IR) lub akustyczne.
Zderzaki i wąsy
Najprostsze czujniki obecnoķci dziaģają na zasadzie bezpoķredniego kontaktu fizycznego. Ich wyjķcie wynosi zero, dopóki faktycznie w coķ nie trafią. Następnie moc gwaģtownie roķnie. W ten sposób dziaģają zderzaki i wąsy. Zderzak moŋe byæ caģkowicie pasywny, powodując, ŋe robot odbija się od rzeczy, w które uderza. Częķciej zderzak ma przeģącznik, który zamyka się, gdy zetknie się, wysyģając sygnaģ do sterownika, powodując cofanie się robota. Kiedy wąsy w coķ uderzają, wibrują. Moŋna to wykryæ i wysģaæ sygnaģ do kontrolera robota. Wiskery mogą wydawaæ się prymitywne, ale są tanią i skuteczną metodą zapobiegania zderzaniu się maszyny z przeszkodami.
Oko elektryczne
Innym prostym schematem wykrywania obecnoķci jest oko elektryczne. Wiązki podczerwieni lub ķwiatģa widzialnego padają na wejķcia, takie jak drzwi i otwory okienne. Fotodetektory odbierają energię z wiązek. Jeķli jakikolwiek fotodetektor przestaje odbieraæ swoją wiązkę, generowany jest sygnaģ.
Czujnik odbiciowy optyczny, IR lub mikrofalowy.
Optyczny czujnik obecnoķci to urządzenie podobne do oka elektrycznego, z tym wyjątkiem, ŋe wykrywa wiązki ķwiatģa odbijane od obiektów, a nie przerywane przez nie. Czujnik obecnoķci na podczerwieņ wykorzystuje podczerwieņ zamiast ķwiatģa widzialnego; czujnik obecnoķci mikrofal wykorzystuje fale elektromagnetyczne o krótkich dģugoķciach fal (rzędu kilku centymetrów lub mniej). Wiązki energii widzialnej, podczerwonej lub mikrofalowej są kierowane do ķrodowiska pracy z róŋnych strategicznych miejsc. Jeķli wprowadzony zostanie jakikolwiek nowy obiekt i jeķli ma on znaczny wspóģczynnik odbicia, fotodetektory wykryją odbitą energię i spowodują wygenerowanie sygnaģu. System widzialny lub IR moŋe zostaæ oszukany przez nieodblaskowe przedmioty. Dobrym przykģadem jest robot pokryty jednolitą, pģaską czarną farbą. Systemy mikrofalowe mogą nie reagowaæ na obiekty skģadające się wyģącznie z materiaģów nieprzewodzących (dielektrycznych), takich jak plastik lub drewno.
Interferometr optyczny, IR lub mikrofalowy
Interferometr moŋe byæ uŋyty przez robota do wykrywania obecnoķci obiektu lub bariery z bliskiej odlegģoķci. Dziaģa na zasadzie interferencji fal i moŋe dziaģaæ przy dowolnej dģugoķci fali elektromagnetycznej (EM). Zwykle uŋywana jest energia EM w zakresie mikrofalowym, podczerwieni lub widzialnym. Kiedy obiekt zawierający wystarczająco odblaskowy materiaģ przenika do przestrzeni roboczej, fala odbita ģączy się z falą padającą, tworząc wzór interferencyjny. Tę interferencję fal moŋna wykryæ i przesģaæ do sterownika robota. Skutecznoķæ interferometru zaleŋy od tego, jak dobrze obiekt lub bariera odbija energię przy dģugoķci fali uŋywanej przez urządzenie. Na przykģad pomalowana na biaģo ķciana jest ģatwiejsza do wykrycia za pomocą interferometru optycznego niŋ podobna ķciana pomalowana na matową czerņ. Ogólnie rzecz biorąc, interferometr dziaģa lepiej, gdy odlegģoķæ maleje, a gorzej, gdy odlegģoķæ roķnie. Waŋna jest równieŋ iloķæ szumów radiowych, podczerwonych lub optycznych w ķrodowisku pracy robota. Im wyŋszy poziom szumów, tym bardziej ograniczony jest zakres dziaģania czujnika i tym większe prawdopodobieņstwo wystąpienia faģszywych trafieņ lub negatywów.
Czujnik ruchu na podczerwieņ
Powszechny system wykrywania obecnoķci wykorzystuje czujnik ruchu na podczerwieņ. Dwa lub trzy szerokokątne impulsy podczerwieni są przesyģane w regularnych odstępach czasu; impulsy te obejmują większoķæ strefy, w której urządzenie jest zainstalowane. Przetwornik odbiorczy odbiera zwróconą energię IR, zwykle odbitą od ķcian, podģóg, sufitów i mebli. Intensywnoķæ odbieranych impulsów jest rejestrowana przez mikroprocesor. Jeķli coķ w pomieszczeniu zmieni poģoŋenie lub pojawi się nowy obiekt, następuje zmiana intensywnoķci odbieranej energii. Mikroprocesor zauwaŋa tę zmianę i generuje sygnaģ. Te urządzenia zuŋywają bardzo maģo energii podczas normalnej pracy, więc baterie mogą sģuŋyæ jako žródģo zasilania.
Promiennikowa czujka ciepģa
Urządzenia na podczerwieņ mogą wykrywaæ zmiany w ķrodowisku wewnętrznym poprzez bezpoķrednie wykrywanie energii IR (często nazywanej ciepģem promieniowania) emanującej z obiektów. Ludzie i wszystkie zwierzęta staģocieplne emitują promieniowanie podczerwone. Ogieņ teŋ. Prosty czujnik podczerwieni w poģączeniu z mikroprocesorem moŋe wykryæ gwaģtowny lub duŋy wzrost iloķci promieniowania cieplnego w pomieszczeniu. Próg czasowy moŋna ustawiæ tak, aby stopniowe lub niewielkie zmiany, na przykģad spowodowane promieniowaniem sģonecznym, nie wyzwoliģy sygnaģu, natomiast znaczące zmiany, takie jak wejķcie osoby do pomieszczenia, tak. Próg zmiany (wzrostu) temperatury moŋna ustawiæ tak, aby maģe zwierzę nie uruchomiģo alarmu, a osoba dorosģa. Tego typu urządzenie, podobnie jak czujnik ruchu na podczerwieņ, moŋe dziaģaæ na baterie. Gģównym ograniczeniem detektorów promieniowania cieplnego jest to, ŋe mogą daæ się zwieķæ. Faģszywe alarmy to ryzyko; sģoņce moŋe nagle oķwietliæ czujnik i wyzwoliæ sygnaģ obecnoķci. Moŋliwe jest równieŋ, ŋe osoba ubrana w zimową kurtkę, buty, kaptur i maskę na twarz, która wģaķnie wchodzi ze ķrodowiska zewnętrznego w temperaturze poniŋej zera, moŋe nie wygenerowaæ sygnaģu. Z tego powodu czujniki ciepģa promiennikowego są częķciej uŋywane jako aktuatory alarmu poŋarowego niŋ jako czujniki obecnoķci.
Ultradžwiękowy czujnik ruchu
Ruch w pomieszczeniu moŋna wykryæ, wykrywając zmiany we względnej fazie fal akustycznych. Ultradžwiękowy czujnik ruchu to interferometr akustyczny, który wykorzystuje zestaw przetworników emitujących fale akustyczne o częstotliwoķciach powyŋej zakresu ludzkiego sģuchu (powyŋej 20 kHz ). Inny zestaw przetworników wychwytuje odbite fale akustyczne, których dģugoķæ wynosi uģamek cala. Jeķli cokolwiek w pomieszczeniu zmieni poģoŋenie, zmienia się względna faza fal odbieranych przez róŋne przetworniki akustyczne. Dane te są przesyģane do mikroprocesora, który wyzwala sygnaģ obecnoķci.
PRESSURE SENSING [CZUJNIK CIĶNIENIA]
Zrobotyzowane czujniki ciķnienia wykrywają i mierzą siģę, aw niektórych przypadkach mogą okreķliæ, gdzie jest przyģoŋona. W podstawowym czujniku nacisku przetwornik wraŋliwy na nacisk informuje robota o zderzeniu się z czymķ. Dwie metalowe pģytki są oddzielone warstwą nieprzewodzącej pianki. To tworzy kondensator. Kondensator jest poģączony z cewką (cewką). Obwód cewki / kondensatora ustawia częstotliwoķæ oscylatora. Przetwornik jest pokryty tworzywem sztucznym, aby zapobiec zwarciu metalu do czegokolwiek. Jeķli jakiķ przedmiot uderzy w czujnik, zmieni się odstęp między pģytami. Zmienia to pojemnoķæ, a tym samym częstotliwoķæ oscylatora. Gdy obiekt oddala się od przetwornika, pianka odskakuje, a pģytki wracają do swoich pierwotnych odstępów. To urządzenie moŋe zostaæ oszukane przez metalowe przedmioty. Jeķli dobry przewodnik elektryczny zbliŋy się do przetwornika, pojemnoķæ moŋe się zmieniæ, nawet jeķli nie zostanie nawiązany kontakt. Pomiędzy pģytami moŋna umieķciæ piankę przewodzącą zamiast pianki dielektrycznej, tak ŋe opór zmienia się wraz z ciķnieniem. Przez urządzenie przepģywa prąd staģy. Jeķli coķ uderzy w przetwornik, prąd roķnie, poniewaŋ opór spada. Ten przetwornik nie będzie reagowaģ na pobliskie obiekty przewodzące prąd, chyba ŋe zostanie przyģoŋona siģa. Sygnaģ wyjķciowy czujnika ciķnienia moŋna przeksztaģciæ na dane cyfrowe za pomocą przetwornika analogowo-cyfrowego. Sygnaģ ten moŋe byæ uŋywany przez kontroler robota. Nacisk na przetwornik z przodu robota moŋe spowodowaæ cofnięcie się maszyny; nacisk po prawej stronie moŋe spowodowaæ skręcenie maszyny w lewo.
PRINTED CIRCUIT [OBWÓD DRUKOWANY]
Obwód drukowany to ukģad okablowania wykonany z folii na pģytce drukowanej. Obwody drukowane moŋna produkowaæ masowo niedrogo i wydajnie. Są kompaktowe i niezawodne. Większoķæ dzisiejszych urządzeņ elektronicznych jest zbudowana przy uŋyciu technologii obwodów drukowanych. Obwody drukowane są wytwarzane poprzez najpierw narysowanie wzoru trawienia. Jest to fotografowane i reprodukowane na przezroczystym plastiku. Plastik nakģada się na pokrytą miedzią pģytę szklano-epoksydową lub fenolową, a montaŋ poddawany jest procesowi fotochemicznemu. Miedž rozpuszcza się w pewnych obszarach, pozostawiając poŋądany obwód jako wzór przebiegów folii. Zastosowanie obwodów drukowanych znacznie zwiększyģo ģatwoķæ, z jaką moŋna serwisowaæ sprzęt elektroniczny. Obwody drukowane pozwalają na budowę moduģową, dzięki czemu caģą pģytkę moŋna wymieniæ w terenie i naprawiæ w peģni wyposaŋonym laboratorium.
PROBLEMÓW REDUKCJA
Zģoŋone problemy moŋna ģatwiej rozwiązaæ, dzieląc je na maģe etapy. Ten proces nazywa się redukcją problemu. To waŋna częķæ badaņ nad sztuczną inteligencją (AI).
Dwie popularne formy
Dowód twierdzenia matematycznego jest dobrym æwiczeniem w redukcji problemu. Innym sposobem rozwijania tej umiejętnoķci jest pisanie programów komputerowych w języku wysokiego poziomu. Rozbijając duŋy, trudny problem na maģe, ģatwe kroki, moŋna straciæ z oczu ogólny obraz. Utrzymywanie mentalnego obrazu celu, postępów i nadchodzących przeszkód to umiejętnoķæ, która staje się coraz lepsza wraz z praktyką. Nie moŋesz usiąķæ i udowodniæ gģębokich twierdzeņ matematycznych, dopóki nie nauczysz się najpierw udowodniæ kilku prostych rzeczy. To samo dotyczy inteligentnych komputerów i robotów.
Maszyna do dowodzenia twierdzeņ
Zaģóŋmy, ŋe budujesz maszynę do potwierdzania twierdzeņ (TPM) i przypisujesz jej plik twierdzenie, którego dowód jest moŋliwy, ale trudny. Często matematyk, gdy chce coķ udowodniæ, nie wie, czy zdanie jest prawdziwe. W ten sposób matematyk wie, czy moŋe rozwiązaæ problem. W przykģadzie pokazanym na ilustracji są cztery ķcieŋki początkowe: A, B, C i D. Dwie z nich, B i C, prowadzą do poŋądanego rezultatu; pozostaģe dwa nie. Ale nawet jeķli TPM zaczyna się wzdģuŋ B lub C, istnieje wiele moŋliwych ķlepych zauģków. W tym przykģadzie istnieje skrzyŋowanie ķcieŋek B i C. Jeden z bocznic ze ķcieŋki B moŋe prowadziæ do poŋądanego rezultatu poķrednio, koņcząc przez ķcieŋkę C. Równieŋ bocznica ze ķcieŋki C moŋe doprowadziæ TPM do próby, przesuwając się na ķcieŋkę B. Jednak te skrzyŋowania mogą równieŋ prowadziæ TPM z powrotem w kierunku punktu początkowego, a byæ moŋe nawet do ķlepych uliczek w drodze powrotnej tam.
Ķlepe zauģki
Gdy TPM wpada w ķlepy zauģek, moŋe się zatrzymaæ, zawróciæ i cofnąæ. Ale skąd TPM moŋe wiedzieæ, ŋe doszģo do ķlepego zauģka? Moŋe próbowaæ wielokrotnie przebiæ się przez barierę bez powodzenia. Jak wiesz z prawdziwego doķwiadczenia, czasami wytrwaģoķæ moŋe pokonaæ trudną przeszkodę, aw innych przypadkach ŋaden wysiģek nie jest w stanie przebiæ się przez tę barierę. Po dģugich próbach wyjķcia ze ķlepego zauģka od rozdraŋnienia i zawróciæ. w którym momencie TPM powinien się poddaæ? Odpowiedž na ten dylemat leŋy w zdolnoķci TPM do uczenia się na podstawie doķwiadczenia. To jedna z najbardziej zaawansowanych koncepcji sztucznej inteligencji. Prawdziwy TPM, który zawsze moŋe rozwiązaæ dowody prawdziwych twierdzeņ, nigdy nie zostanie, a wģaķciwie nigdy, nie zostanie skonstruowany. Dzieje się tak, poniewaŋ w kaŋdym systemie logicznym istnieją instrukcje, których nie moŋna udowodniæ prawdziwoķci lub faģszu w skoņczonej liczbie kroków. Zostaģo to udowodnione przez logika Kurt Gödel w 1930 roku i nazywa się to twierdzeniem o niezupeģnoķci.
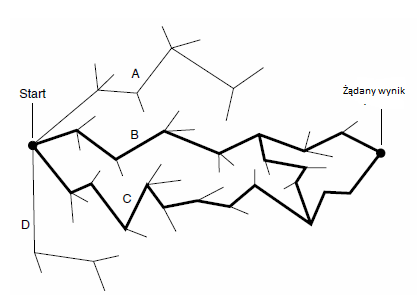
PROPRIOCEPTOR
Jeķli zamkniesz oczy i poruszysz rękami, zawsze moŋesz powiedzieæ, gdzie są twoje ręce. Wiesz, czy masz podniesione ręce, czy teŋ wiszą po bokach. Wiesz, jak mocno zgięte są ģokcie, jak skręcone są nadgarstki i czy masz otwarte czy zamknięte dģonie. Wiesz, które palce są zgięte, a które proste, wiesz o tym dzięki nerwom w ramionach i zdolnoķci mózgu do interpretowania sygnaģów wysyģanych przez nerwy. Robot posiadający podobny zmysģ ma pewne zalety, poniewaŋ moŋe okreķlaæ swoje poģoŋenie względem siebie i postępowaæ zgodnie z nim. Proprioceptor to system czujników, który na to pozwala.
PROSODYCZNE CECHY
W mowie ludzkiej znaczenie jest przekazywane przez fleksję (ton gģosu) jako ,a takŋe przez rzeczywiste wypowiadane džwięki. Byæ moŋe sģyszaģeķ prymitywne urządzenia do syntezy mowy o ich monotonnej, pozbawionej emocji jakoķci. Moŋna byģo doskonale zrozumieæ sģowa, ale brakowaģo im zmian w tonacji, synchronizacji i gģoķnoķci, które nadają gģębi wypowiadanym wypowiedziom. Te odmiany nazywane są cechami prozodycznymi. Aby zilustrowaæ znaczenie cech prozodycznych, rozwaŋ zdanie, "Pójdziesz do sklepu po póģnocy". Spróbuj podkreķliæ kaŋde sģowo po kolei:
o Pójdziesz do sklepu po póģnocy.
o Pójdziesz do sklepu po póģnocy.
o Pójdziesz do sklepu po póģnocy.
o Pójdziesz do sklepu po póģnocy.
o Pójdziesz do sklepu po póģnocy.
Teraz, zamiast skģadaæ oķwiadczenie, zadaj pytanie, ponownie podkreķlając po kolei kaŋde sģowo. Po prostu zastąp kropkę znakiem zapytania. Masz 16 róŋnych odmian prozodycznych tego jednego ciągu sģów. Kilka z nich jest bez znaczenia lub gģupich, ale róŋnice między większoķcią są uderzające. W rozpoznawaniu mowy waŋne są odchylenia prozodyczne. Dzieje się tak, poniewaŋ jeķli powiesz coķ w jeden sposób, moŋesz mieæ na myķli coķ zupeģnie innego niŋ gdybyķ wypowiedziaģ tę samą serię sģów w inny sposób. Programowanie maszyny tak, aby wychwytywaģa te subtelne róŋnice, jest jednym z największych wyzwaņ stojących przed naukowcami zajmującymi się sztuczną inteligencją.
PROTEZA
Proteza to sztuczna koņczyna lub częķæ ciaģa ludzkiego. Robotyka umoŋliwiģa zbudowanie elektromechanicznych ramion, rąk i nóg zastępujących koņczyny osób po amputacji, wykonano równieŋ sztuczne narządy oraz opracowano mechaniczne nogi w taki sposób, aby umoŋliwiæ chodzenie. Sztuczne dģonie mogą chwytaæ; protezy ramion mogą rzucaæ piģką. Niektóre narządy wewnętrzne moŋna zastąpiæ, przynajmniej na krótki czas, maszynami. Jednym z przykģadów jest dializa nerek. Inne jest sztuczne serce. Niektóre urządzenia elektroniczne lub elektromechaniczne nie zastępują caģkowicie częķci ludzkiego ciaģa, ale pomagają ŋywym organom robiæ to, co powinny. Przykģadem jest rozrusznik serca. Jednym z największych problemów związanych z protezami jest to, ŋe organizm czasami odrzuca je jako ciaģa obce. Ludzki ukģad odpornoķciowy, który chroni przed chorobami, traktuje maszynę jak ķmiercionoķny wirus lub bakterię i próbuje ją zniszczyæ. To stwarza zagraŋający ŋyciu stres na ciele. Aby temu zapobiec, lekarze czasami podają leki hamujące dziaģanie ukģadu odpornoķciowego. Moŋe to jednak sprawiæ, ŋe osoba będzie bardziej podatna na choroby, takie jak zapalenie pģuc i róŋne infekcje wirusowe. Nie opracowano jeszcze protez, które miaģyby wyrafinowany zmysģ dotyku. Moŋna by opracowaæ prymitywne wyczuwanie tekstury, ale czy kiedykolwiek będzie ono tak samo wymagające, jak prawdziwy zmysģ dotyku? Zaleŋy to od tego, czy obwody elektroniczne mogą powielaæ zģoŋone impulsy, które przechodzą przez ŋywe nerwy. Wģóŋ do kieszeni ani grosza i ani grosza. Sięgnij i za pomocą samego dotyku dowiedz się, który jest który. To jest ģatwe; grosz ma prąŋkowaną krawędž, ale brzeg grosza jest gģadki. Dane te przechodzą z palców do mózgu jako impulsy nerwowe. Czy te impulsy mogą byæ kopiowane przez przetworniki elektromechaniczne? Uwaŋa tak wielu badaczy, podobnie jak Alexander Graham Bell uwaŋaģ, ŋe fale gģosowe mogą byæ kopiowane przez urządzenia elektroniczne.
PROXIMITY SENSING [WYKRYWANIE ZBLIŊENIOWE]
Wykrywanie bliskoķci to zdolnoķæ robota do okreķlenia, kiedy znajduje się w pobliŋu obiektu lub kiedy coķ jest w pobliŋu. Ten zmysģ zapobiega wpadaniu robota na rzeczy. Moŋe byæ równieŋ uŋywany do pomiaru odlegģoķci od robota do obiektu.
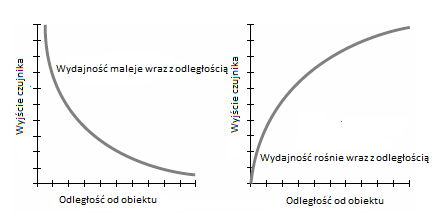
Podstawowa zasada
Większoķæ czujników zbliŋeniowych dziaģa w ten sam sposób: sygnaģ wyjķciowy przetwornika przemieszczenia zmienia się wraz z odlegģoķcią od jakiegoķ obiektu. Moŋe to przybieraæ dwie formy, jak pokazano na wykresach: po lewej, sygnaģ wyjķciowy czujnika maleje wraz ze wzrostem odlegģoķci, po prawej, sygnaģ wyjķciowy czujnika roķnie wraz ze wzrostem odlegģoķci. Teoretycznie kaŋdy typ przetwornika przemieszczenia moŋe dziaģaæ w dowolnej aplikacji, ale w danej sytuacji zwykle ģatwiej jest pracowaæ z jednym typem niŋ z drugim.
Pojemnoķæ i indukcyjnoķæ
Obecnoķæ pobliskich obiektów moŋe powodowaæ wzajemne efekty pojemnoķciowe lub indukcyjne. Efekty te moŋna wykryæ i przesģaæ sygnaģy do sterownika robota. Pojemnoķciowe czujniki zbliŋeniowe dziaģają z wykorzystaniem efektów elektrostatycznych, podczas gdy indukcyjne czujniki zbliŋeniowe wykorzystują sprzęŋenie ferromagnetyczne.
Ladar
Podczerwieņ (IR) lub widzialna wiązka laserowa moŋe zostaæ odbita od wszystkiego, co się tam znajduje odbija lub rozprasza energię. Moŋna zmierzyæ opóžnienie sygnaģu zwrotnego, a odlegģoķæ do obiektu okreķliæ przez ukģad sterowania robota. Nazywa się to ladar (skrót od wykrywania laserowego i okreķlania odlegģoķci). Ladar nie będzie dziaģaģ w przypadku obiektów, które nie odbijają podczerwieni ani energii widzialnej. Pomalowana na biaģo ķciana dobrze odbija taką energię; ta sama ķciana pomalowana na matową czerņ nie będzie. Ladar dziaģa lepiej na stosunkowo duŋych odlegģoķciach niŋ na krótkich dystansach, na których sonar lub interferometria zapewniają lepsze wyniki.
Radar i sonar
Wykrywanie bliskoķci moŋna przeprowadziæ za pomocą radaru lub sonaru. Radar wspóģpracuje z sygnaģami ultrawysokiej częstotliwoķci (UHF) lub mikrofalowymi sygnaģami radiowymi. Sonar uŋywa fale akustycznych. Impulsy są przekazywane i odbierane po odbiciu od obiektów. Mierzony jest czas opóžnienia, a wyniki wysyģane do sterownika robota. Zasada jest w zasadzie podobna do zasady dziaģania laserowego czujnika zbliŋeniowego. Radar nie będzie dziaģaģ w przypadku obiektów, które nie odbijają energii UHF lub mikrofal. Obiekty metalowe dobrze odbijają tę energię; sģona woda jest sprawiedliwa; a drzewa i domy są biedne. Radar, podobnie jak ladar, dziaģa lepiej na duŋe odlegģoķci niŋ z bliska. Sonar moŋe dobrze funkcjonowaæ na maģych odlegģoķciach, poniewaŋ prędkoķæ džwięku jest znacznie mniejsza niŋ prędkoķæ fal elektromagnetycznych (EM) w wolnej przestrzeni.
Historycznie rzecz biorąc, ludziom podobaģ się pomysģ zbudowania robota na ludzki obraz. Taka maszyna ma dwie nogi. W praktyce robot dwunoŋny lub dwunoŋny jest trudny do zaprojektowania. Ma sģabe poczucie równowagi; ģatwo się przewraca. Poczucie równowagi, które ludzie uwaŋają za coķ oczywistego, jest trudne do wbudowania w maszynę. (Specjalistyczne roboty dwukoģowe zostaģy zaprojektowane z wyczuciem równowagi, ale są one wyrafinowane i kosztowne). Aby zagwarantowaæ stabilnoķæ, robot wykorzystujący nogi do poruszania się musi zawsze mieæ co najmniej trzy stopy w kontakcie z powierzchnią. Czworonoŋna maszyna, zwana czworonoŋnym robotem, moŋe podnosiæ jedną nogę na raz podczas chodzenia i zachowaæ stabilnoķæ. Jedyny problem występuje, gdy trzy nogi związane z powierzchnią leŋą na wspólnej linii lub w jej pobliŋu, jak pokazano po lewej stronie ilustracji. W takich warunkach czworonoŋny przedmiot moŋe się przewróciæ. W najlepszym modelu czworokątnym cztery stopy sięgają do ziemi w punktach, które nie znajdują
się w pobliŋu wspólnej linii, jak pokazano po prawej stronie ilustracji. Następnie, gdy jedna stopa jest podniesiona do napędu, pozostaģe trzy znajdują się na powierzchni w wierzchoģkach dobrze zdefiniowanego trójkąta. W tych przykģadach peģne kropki oznaczają stopy na ziemi; otwarty okrąg przedstawia stopę, która jest w danym momencie podniesiona. Wielu inŋynierów uwaŋa, ŋe szeķæ nóg jest optymalnym rozwiązaniem dla robotów zaprojektowanych do napędzania nogami, a nie toczeniem się na koģach lub napędem gąsienicowym. Roboty z szeķcioma nogami mogą podnosiæ jedną lub dwie nogi na raz podczas chodzenia i zachowaæ stabilnoķæ. Im więcej nóg ma robot, tym lepsza jest jego stabilnoķæ; ale istnieje praktyczny limit. Ruchy nóg robota muszą byæ odpowiednio skoordynowane, aby maszyna mogģa się poruszaæ bez marnowania ruchu i energii. Wraz ze wzrostem liczby nóg staje się to coraz trudniejsze.
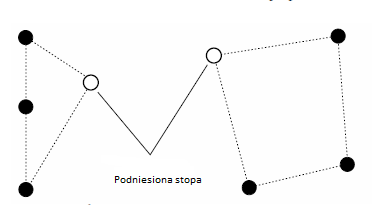
QUADTREE [DREWO CZWÓRKOWE]
Czworokąt to schemat, w którym dwuwymiarowy (2-D) prostokąt siatkę zajętoķci moŋna podzieliæ na mniejsze i mniejsze podelementy, jeķli jest to konieczne do zdefiniowania funkcji do poŋądanego poziomu rozdzielczoķci. Ilustracja przedstawia prosty przykģad. W tym przypadku ķrodowisko pracy robota (lub przestrzeņ ķwiata) jest pokazane przez największy kwadrat. Ten kwadrat jest podzielony na cztery kwadratowe podelementy. Lewy górny podelement jest z kolei podzielony na cztery kwadratowe podelementy (lub podelementy 2 ); prawy dolny element podrzędny jest podzielony na cztery elementy podrzędne 3 ; prawy dolny podrzędny 3 - element jest podzielony na cztery podrzędne 4 -elementy; lewy górny element podrzędny jest podzielony na cztery kwadratowe elementy podrzędne 5 . Ten proces moŋe trwaæ aŋ do osiągnięcia granicy rozdzielczoķci lub wymaganego poziomu dokģadnoķci. Jeķli przestrzeņ ķwiata nie ma ksztaģtu kwadratu lub prostokąta, sytuacja się komplikuje. Jednak mapa bitowa elementów kwadratowych moŋe przybliŋyæ dwuwymiarową przestrzeņ ķwiata o dowolnym ksztaģcie, pod warunkiem, ŋe elementy są wystarczająco maģe. Jeķli przestrzeņ ķwiata robota jest trójwymiarowa (3-D), moŋna ją podzieliæ na kostki lub prostokątne graniastosģupy (bloki). Kaŋdy blok moŋna podzieliæ na osiem podbloków. Proces ten moŋna powtórzyæ w taki sam sposób, jak w przypadku poczwórnego drzewa 2D. Wynik nazywany jest oktree.
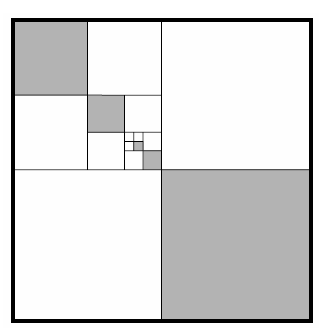
QUALITY ASSURANCE AND CONTROL [ZAPEWNIANIE I KONTROLA JAKOĶCI (QA / QC)]
W pracy w fabryce roboty mogą wykonywaæ powtarzalne zadania dokģadniej i szybciej niŋ pracownicy. Robotyzacja poprawiģa jakoķæ, a takŋe zwiększyģa wielkoķæ produkcji w wielu branŋach.
Robię to lepiej
Waŋny, ale często pomijany aspekt zapewniania jakoķci i kontrola leŋy w samym procesie produkcji. Jeden sposób na zapewnienie doskonaģoķci i jakoķci to perfekcyjne wykonanie. Roboty są do tego idealne. Nie wszystkie roboty dziaģają szybciej niŋ ludzie, ale roboty są prawie zawsze bardziej spójne i niezawodne. Gdy proces produkcji jest ulepszony, mniej wadliwych jednostek schodzi z linii montaŋowej. To sprawia, ŋe zapewnienie i kontrola jakoķci (QA / QC) jest stosunkowo ģatwe. Niektórzy inŋynierowie QA / QC twierdzą, ŋe w idealnym ķwiecie ich praca nie byģaby konieczna. Wadliwe materiaģy naleŋy wyrzuciæ przed umieszczeniem ich w cokolwiek. Roboty montaŋowe powinny wykonywaæ perfekcyjną pracę. Ta filozofia zostaģa sformuģowana przez japoņskiego inŋyniera QA / QC Hajime Karatsu: "Wykonaj tak dobrą robotę, ŋe kontrolery QA / QC nie są konieczne". Jest to oczywiķcie ideaģ teoretyczny; procesy produkcyjne nie są i nigdy nie będą doskonaģe. Zawsze będą bģędy w montaŋu lub wadliwe komponenty, które dostaną się do jednostek produkcyjnych. W związku z tym zawsze będzie potrzeba co najmniej jednej osoby odpowiedzialnej za kontrolę jakoķci / kontroli jakoķci, aby uniemoŋliwiæ zģym jednostkom dotarcie do kupujących.
Inspektorzy
Roboty mogą czasami pracowaæ jako inŋynierowie QA / QC. Mogą to jednak zrobiæ tylko w przypadku prostych inspekcji, poniewaŋ praca w zakresie zapewniania jakoķci / kontroli jakoķci często wymaga od inspektora wyostrzonego osądu. Jednym z prostych zadaņ QA / QC jest sprawdzanie wysokoķci butelek podczas ruchu wzdģuŋ linii montaŋowej. Poģączenie lasera i robota moŋe wykryæ butelki, które nie mają odpowiedniej wysokoķci. Zasada jest pokazana na ilustracji. Jeķli butelka jest za krótka, obie wiązki laserowe docierają do fotodetektorów. Jeķli butelka jest zbyt wysoka, ŋadna wiązka lasera nie dociera do fotodetektorów. W kaŋdej z tych sytuacji ramię robota / chwytak podnosi wadliwą butelkę z linii i wyrzuca ją. Dopiero gdy butelka znajdzie się w bardzo wąskim zakresie wysokoķci (dopuszczalnym zakresie), jeden laser dotrze do swojego fotodetektora, podczas gdy drugi laser będzie zablokowany. Następnie butelka moŋe przejķæ. Zrobotyzowane procesy QA / QC stają się coraz bardziej zģoŋone i wyrafinowane wraz z rozwojem sztucznej inteligencji (AI). Ale niektóre decyzje dotyczące kontroli jakoķci / kontroli jakoķci wymagają intuicji. To poczucie jest powszechne u ludzi, ale inŋynierowie zastanawiają się, czy moŋna tak zaprogramowaæ jakąkolwiek maszynę. Niektóre komputery mogą uczyæ się na swoich bģędach i podejmowaæ ķwiadome decyzje na podstawie duŋych iloķci danych, ale zdolnoķæ "podąŋania za przeczuciem" wydaje się cechą charakterystyczną tylko dla ludzi.
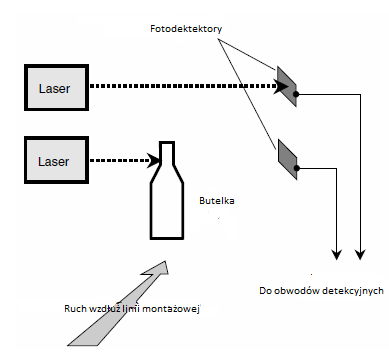
Fale elektromagnetyczne o częstotliwoķciach radiowych (RF) odbijają się od metalowych przedmiotów. Termin radar jest skrótem od radio detection and ranging. Radar moŋe byæ uŋywany przez roboty jako pomoc w nawigacji, a takŋe do pomiaru prędkoķci. System radarowy przeznaczony do pomiaru odlegģoķci i kierunku skģada się z nadajnika, anteny kierunkowej, odbiornika i wskažnika pozycji. Nadajnik wytwarza intensywne impulsy mikrofal RF. Te fale uderzają w obiekty. Niektóre rzeczy (takie jak samochody i cięŋarówki) odbijają fale radarowe lepiej niŋ inne (na przykģad drewno). Odbite sygnaģy lub echa są wychwytywane przez antenę. Im dalej odbijający się obiekt, tym dģuŋszy czas przed odebraniem echa. Antena nadawcza jest obracana tak, ŋe radar widzi we wszystkich kierunkach. Gdy antena radaru obraca się, echa są odbierane z róŋnych kierunków. W robocie te echa są przetwarzane przez mikrokomputer, który daje maszynie poczucie jej poģoŋenia względem ķrodowiska pracy. Radar moŋe byæ uŋywany przez zautomatyzowane
samoloty i statki kosmiczne. Specjalna forma radaru, zwana radarem dopplerowskim, sģuŋy do pomiaru prędkoķci zbliŋającego się lub cofającego celu lub prędkoķci robota względem bariery. Ten rodzaj radaru dziaģa na zasadzie efektu Dopplera, jak pokazano na ilustracji. W ten sposób radar policyjny mierzy prędkoķæ nadjeŋdŋającego pojazdu.
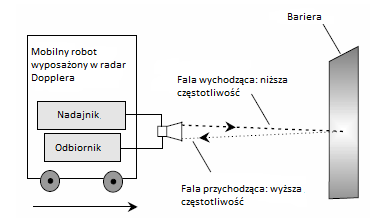
RADIOWEJ CZĘSTOTLIWOĶCI ZAKĢÓCENIA (RFI)
Zakģócenia o częstotliwoķci radiowej (RFI) to zjawisko, w którym urządzenia elektroniczne zakģócają wzajemnie dziaģanie. W ostatnich latach ten problem pogģębiaģ się, poniewaŋ mnoŋą się konsumenckie urządzenia elektroniczne i stają się one coraz bardziej podatne na RFI. Wiele RFI wynika z gorszej konstrukcji sprzętu. Do pewnego stopnia wadliwe metody instalacji równieŋ przyczyniają się do problemu. Komputery wytwarzają energię o szerokopasmowej częstotliwoķci radiowej (RF), która jest wypromieniowywana, jeķli komputer nie jest dobrze ekranowany. Komputery mogą dziaģaæ nieprawidģowo z powodu silnych pól RF, takich jak te z pobliskiego nadajnika. Moŋe się to zdarzyæ i często ma miejsce, gdy nadajnik telewizyjny dziaģa doskonale. W takich przypadkach, a takŋe w przypadkach dotyczących telefonów komórkowych, radia pasmowego (CB) obywatelskiego i radia amatorskiego ("krótkofalowego"), sprzęt nadawczy prawie nigdy nie jest uszkodzony; problemem jest prawie zawsze niewģaķciwe lub nieskuteczne ekranowanie systemu
komputerowego. RFI jest często wychwytywane przez kable zasilające i ģączące. Istnieją metody omijania lub dģawienia RF na tych kablach, zapobiegając przedostaniu się go do komputera, ale bypass lub dģawik nie mogą zakģócaæ transmisji danych przez kable. Aby uzyskaæ poradę, skonsultuj się ze sprzedawcą lub producentem komputera. Linie energetyczne mogą powodowaæ RFI. Taka interferencja jest prawie zawsze spowodowana wyģadowaniem ģukowym. Przyczyną moŋe byæ uszkodzony transformator, zģa latarnia uliczna lub zaufany izolator. Często pomoc moŋna uzyskaæ dzwoniąc do przedsiębiorstwa uŋytecznoķci publicznej. W przewodzie zasilającym znajduje się tģumik przejķciowy, zwany takŋe tģumikiem przepięæ niezbędny do niezawodnej pracy komputera osobistego lub kontrolera robota pracującego z sieci energetycznej. Filtr liniowy, skģadający się z kondensatorów między kaŋdą stroną linii zasilającej a uziemieniem, moŋe pomóc w zapobieganiu przedostawaniu się częstotliwoķci radiowych do komputera przez linie zasilające. W miarę
jak komputery stają się coraz bardziej przenoķne i coraz powszechniejsze, pojawiają się problemy z RFI moŋna spodziewaæ się pogorszenia sytuacji, chyba ŋe producenci zwrócą większą uwagę na ekranowanie elektromagnetyczne. Poniewaŋ komputery są coraz częķciej uŋywane jako kontrolery robotów, potencjalne problemy się mnoŋą. Bģędny robot moŋe stworzyæ zagroŋenie i spowodowaæ wypadki. Zagroŋenie jest największe w przypadku urządzeņ medycznych lub podtrzymujących ŋycie.
RANGE [ZASIĘG]
Zasięg to odlegģoķæ mierzona wzdģuŋ linii prostej w okreķlonym kierunku w przestrzeni trójwymiarowej (3-D), między robotem a obiektem lub barierą w ķrodowisku pracy. W przypadku czujnika zasięg to maksymalna odlegģoķæ promieniowa, na której moŋna oczekiwaæ, ŋe urządzenie będzie dziaģaæ poprawnie. W matematyce i logice termin zakres odnosi się do zbioru obiektów (zwykle liczb), na które odwzorowywane są obiekty z dziedziny funkcji matematycznej.
RANGE OF FUNCTION [ZAKRES FUNKCJI]
Zakres funkcji matematycznej to zbiór rzeczy (zwykle liczb), na które mapowane są obiekty w domenie. Kaŋdy x w dziedzinie funkcji f jest odwzorowywany na dokģadnie jedną wartoķæ y. Mogą istnieæ i często istnieją wartoķci y, które nie mają niczego odwzorowanego przez funkcję f. Punkty te są poza zakresem f. Zaģóŋmy, ŋe otrzymujesz funkcję f (x) = + x 1/2 (czyli dodatni pierwiastek kwadratowy z x) dla x> 0. Wykres tej funkcji jest pokazany na ilustracji. Ta funkcja zawsze odwzorowuje x na dodatnią liczbę rzeczywistą y. Bez względu na to, jaką wartoķæ wybierzesz dla x w domenie w tym przykģadzie, + x 1/2 jest dodatnie. Komputery pracują intensywnie z funkcjami, zarówno analogowymi, jak i cyfrowymi. Funkcje są waŋne w zrobotyzowanych systemach nawigacji, lokalizacji i pomiarach.
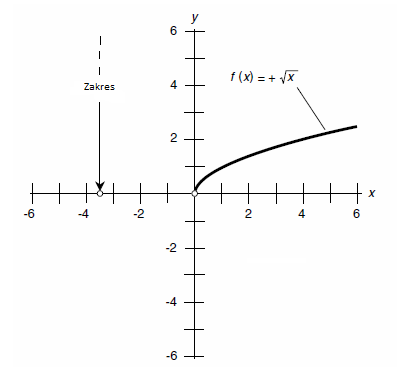
RANGE PLOTTING [WYKREĶLANIE ZAKRESU]
Rysowanie odlegģoķci to proces, w którym generowany jest wykres przedstawiający odlegģoķæ (zakres) do obiektów w funkcji kierunku w dwóch lub trzech wymiarach. Aby wykonaæ jednowymiarowe (1-D) wykreķlanie zakresu, wysyģany jest sygnaģ, a robot mierzy czas potrzebny na powrót echa. Sygnaģ ten moŋe byæ falą akustyczną, w którym to przypadku urządzeniem jest sonar. Lub moŋe to byæ fala radiowa; to jest radar. Jeķli jest to ķwiatģo widzialne w postaci wiązki laserowej, to jest to ladar. Dwuwymiarowe (2-W) kreķlenie zakresu polega na odwzorowaniu odlegģoķci do róŋnych obiektów w funkcji ich kierunku w okreķlonej pģaszczyžnie. Na ilustracji przedstawiono jedną metodę. Robot znajduje się poķrodku dziaģki, w pomieszczeniu zawierającym trzy biurka (prostokąty) i dwie lampy podģogowe (kóģka). Zasięg jest mierzony co 10 o azymutu wokóģ peģnego koģa, w wyniku czego powstaje zestaw pokazanych punktów. Lepszy wykres uzyskano by, gdyby zakres byģ wykreķlany co 5 o , co 2 o lub nawet co 1 o lub mniej. Ale bez względu na to, jak szczegóģowa jest rozdzielczoķæ kierunku, wykres zakresu 2-D moŋe pokazywaæ rzeczy tylko w jednej pģaszczyžnie, na przykģad poziom podģogi lub jakąķ poziomą pģaszczyznę nad podģogą. Trójwymiarowe (3-W) wykreķlanie zakresu wymaga uŋycia wspóģrzędnych sferycznych. Odlegģoķæ naleŋy mierzyæ dla wielu kierunków we wszystkich poģoŋeniach. Wykres zasięgu 3-W w pomieszczeniu, takim jak przedstawiony na ilustracji, pokazaģby osprzęt sufitowy, obiekty na podģodze, obiekty na biurkach i inne szczegóģy niewidoczne na wykresie zasięgu 2-D.
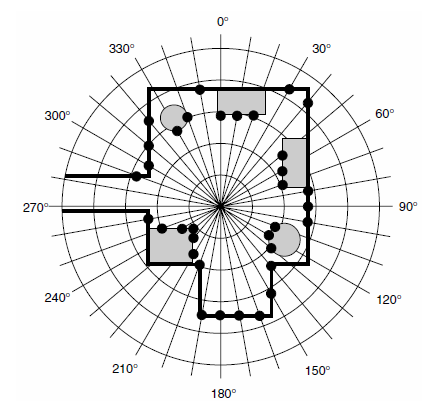
REAKTYWNY PARADYGMAT
Paradygmat reaktywny to podejķcie do programowania robotów, w którym wszystkie dziaģania są bezpoķrednim wynikiem wyjķcia czujnika. Nie jest wymagane planowanie z wyprzedzeniem. Podejķcie to powstaģo z powodu ograniczeņ nieodģącznie związanych z paradygmatem hierarchicznym, który polega na sztywnym przestrzeganiu okreķlonego planu w celu osiągnięcia celu. Paradygmat reaktywny staģ się popularny okoģo 1990 roku, a jego stosowanie byģo preferowane na początku lat dziewięædziesiątych. W najbardziej wyrafinowanych systemach robotów istnieją trzy podstawowe funkcje, znane jako planowanie / wyczuwanie / dziaģanie. Paradygmat reaktywny upraszcza to, aby wyczuæ / dziaģaæ. Robot dziaģający w ten sposób jest analogiczny do czģowieka lub zwierzęcia, które wykazuje odruchy, gdy pojawiają się okreķlone bodžce. Gģówną zaletą paradygmatu reaktywnego jest duŋa prędkoķæ. Tak jak ludzkie lub zwierzęce odruchy zachodzą szybciej niŋ zachowania wymagające ķwiadomego myķlenia (rozwaŋania), roboty stosujące paradygmat reaktywny mogą niemal natychmiast reagowaæ na zmiany w swoim ķrodowisku. Jednak podejķcie to ma wady. Proste podejķcie polegające na wyczuciu / dziaģaniu moŋe czasami skutkowaæ cyklicznymi zmianami między dwoma stanami, bez postępu w kierunku zamierzonego celu. Moŋna to uznaæ za robotyczny odpowiednik ludzkiej dezorientacji lub paniki
RZECZYWISTY CZAS
W komunikacji lub przetwarzaniu danych operacja wykonywana "na ŋywo" jest nazywana dziaģaniem w czasie rzeczywistym. Termin odnosi się szczególnie do komputerów. Wymiana danych w czasie rzeczywistym umoŋliwia rozmowę między komputerem a operatorem. Obsģuga w czasie rzeczywistym jest wygodna do przechowywania i weryfikowania danych w krótkim czasie. Dzieje się tak np. Przy dokonywaniu rezerwacji lotniczych, sprawdzaniu karty kredytowej czy dokonywaniu transakcji bankowej, jednak operacja w czasie rzeczywistym nie zawsze jest konieczna. Pisanie dģugiego programu na dziaģającym terminalu jest stratą czasu na komputerze. Dģugie programy najlepiej pisaæ w trybie offline, testowaæ w czasie rzeczywistym (on-line) i debugowaæ w trybie offline. We flocie robotów-owadów, kontrolowanych przez jeden komputer, wszystkie roboty mogą jednoczeķnie dziaģaæ w czasie rzeczywistym. Jedną z metod osiągnięcia tego jest dzielenie czasu. Sterownik zwraca uwagę na kaŋdego robota przez niewielki okres czasu, stale obracając się między robotami z duŋą prędkoķcią.
REKURENCJA
Rekurencja to logiczny proces, w którym jedno lub więcej zadaņ jest odkģadanych na bok podczas przedstawiania gģównego argumentu. Rekursja jest powszechna w programach komputerowych, gdzie moŋe przybraæ formę zagnieŋdŋonych pętli. Rekursja jest równieŋ przydatna w dowodzeniu twierdzeņ matematycznych i prawnych. To potęŋne narzędzie w sztucznej inteligencji (AI).
Pamiętaj o ostatecznym celu
Rekurencja moŋe byæ skomplikowana i jest jedną z najbardziej zaawansowanych form ludzkiego rozumowania. Aby rekursja zadziaģaģa, ogólny kierunek postępu jest w kierunku ostatecznego celu. Moŋe się wydawaæ, ŋe ķledzenie boczne nie ma nic wspólnego z zamierzonym wynikiem, ale w przypadku rekurencji zawsze istnieje ku temu powód. Wszystkie subargumenty muszą ostatecznie zostaæ wyciągnięte i wykorzystane w gģównym argumencie. Komputery idealnie nadają się do argumentów rekurencyjnych. Podargumenty moŋna wykonaæ, a wyniki zapamiętaæ. Ludzie są zdezorientowani, gdy jest zbyt wiele bocznych torów; nie tak z komputerami. Zrobią dokģadnie to, do czego są zaprogramowani, i nie rozpraszają się, bez względu na to, ile jest bocznych torów. W skomplikowanej, rekurencyjnej argumentacji, boczne tory mogą byæ zabezpieczone jeden na drugim, tak jak samoloty czekające na lądowanie na duŋym lotnisku. Podargumenty są przechowywane w stosach przesuwających lub rejestrach pamięci pierwszy na wejķciu / wyjķciu. W razie potrzeby wyniki z bocznego toru są wyciągane ze stosów. Ilustracja przedstawia argument rekurencyjny z kilkoma stosami pushdown.
Rozģączenia
Jeķli komputer uŋywa logiki rekurencyjnej i zbytnio zbacza z drogi, moŋe straciæ z oczu ostateczny cel lub chodziæ w kóģko w logicznych kręgach. Kiedy dzieje się to w programie komputerowym, nazywa się to nieskoņczoną pętlą lub nieskoņczoną pętlą. To uniemoŋliwia rozwiązanie ŋadnego problemu. Jest jeszcze jedna logiczna puģapka, w którą ģatwo wpaķæ czģowiek, wykonując argument rekurencyjny. Ma to na celu "udowodnienie" czegoķ przez nieķwiadome zaģoŋenie, ŋe to juŋ prawda. Komputery odpowiednio zaprogramowane nie popeģniają tego bģędu.
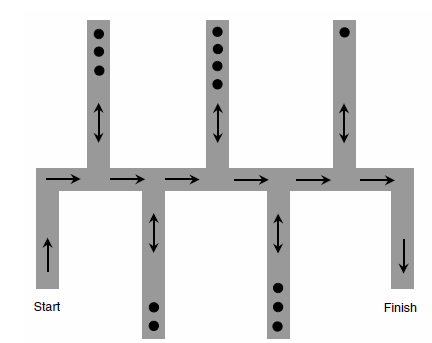
REDUKCJONIZM
Redukcjonizm to hipoteza, ŋe maszyny mogą powielaæ caģą ludzką myķl. Czy ostatecznie wszystkie ludzkie myķli i emocje moŋna zredukowaæ do logicznych jedynek i zer? Redukcjonista powiedziaģby, ŋe tak. Mózg ludzki jest znacznie bardziej skomplikowany niŋ jakikolwiek inny komputer, ale jest zbudowany z skoņczonej liczby pojedynczych komórek. W przypadku dowolnej liczby skoņczonej, niewaŋne jak duŋa, istnieje liczba większa. Jeķli mózg ma, powiedzmy, odpowiednik 1025 bramek logicznych, to przynajmniej w teorii moŋe istnieæ chip komputerowy z 1025 bramkami logicznymi. Redukcjonista argumentuje, ŋe caģa ludzka aktywnoķæ umysģowa to nic innego jak suma wielu bram dziaģających na wiele sposobów. Chociaŋ liczba moŋe byæ gigantyczna, niemniej jednak jest ograniczona. Redukcjonizm jest przedmiotem zainteresowania badaczy sztucznej inteligencji (AI). Jeķli hipoteza redukcjonistyczna okaŋe się prawdziwa, wówczas moŋna by stworzyæ komputery w ŋywe istoty. Niektórzy badacze są entuzjastycznie nastawieni do tego i inni są zaniepokojeni moŋliwymi negatywnymi konsekwencjami. Autorzy science fiction wykorzystali ten temat; byæ moŋe najwczeķniejszym przykģadem byģa sztuka Rossum's Universal Robots, napisana w 1920 roku przez Karela Capeka. W tej sztuce, którą autor zamierzyģ jako satyrę, oŋywają roboty i przejmują wģadzę nad ķwiatem.
REGULARNA SIATKA
Siatka regularna to metoda podziaģu pracy dwuwymiarowej (2-D) ķrodowiska w obszary kwadratowe lub prostokątne. W trójwymiarowym (3-D), regiony mają ksztaģt szeķcianu lub pudeģka. Podstawą siatki prostokątnej jest kartezjaņski ukģad wspóģrzędnych, zwany takŋe prostokątnym ukģadem wspóģrzędnych. Jest to znana pģaszczyzna xy lub przestrzeņ xyz geometrii analitycznej
.
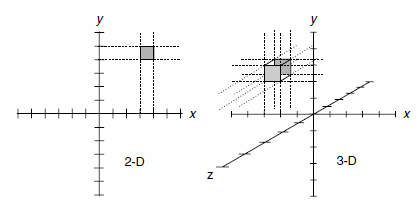
REINICJALIZACJA
. Czasami kontroler robota będzie dziaģaģ nieprawidģowo z powodu zabģądzenia
W takim przypadku mikrokomputer dziaģa nieprawidģowo lub przestaje dziaģaæ. Ponowna inicjalizacja polega na ustawieniu wszystkich linii mikrokomputera na stan niski lub zerowy. Większoķæ mikrokomputerów jest automatycznie inicjowana ponownie po kaŋdym odģączeniu i ponownym wģączeniu zasilania. Jednak nie wszystkie mikrokomputery mają tę funkcję; Aby ponownie zainicjowaæ takie urządzenia, naleŋy zastosowaæ okreķloną procedurę.
RELACYJNY WYKRES
Wykres relacyjny jest reprezentacją ķrodowiska pracy robota w postaci punktów zwanych węzģami i linii ģączących te punkty, zwanych krawędziami. Na podstawie mapy komputerowej generowany jest wykres relacyjny. Rozwaŋ prosty plan piętra, taki jak przedstawiony na ilustracji. Podstawowy wykres relacyjny moŋna wygenerowaæ, lokalizując punkty ķrodkowe wszystkich pokoi i punkty ķrodkowe wszystkich przejķæ i definiując kaŋdy taki punkt jako węzeģ. Jeķli w korytarzu występuje zakręt, jako węzeģ definiuje się punkt w poģowie odlegģoķci od wystającego naroŋnika do przeciwlegģej ķciany, obejmujący kąt 135 o z dowolną ķcianą w rogu. Węzģy te są następnie ģączone prostymi krawędziami. Wykresy relacyjne umoŋliwiają nawigację robota w ķrodowiskach, które nie zmieniają się geometrycznie i nie są umieszczane ŋadne nowe przeszkody, jednak ten typ wykresu nie reprezentuje na ogóģ najbardziej wydajnej metody nawigacji i moŋe byæ nieodpowiedni dla duŋych robotów lub dla flot robotów na ograniczonej przestrzeni.
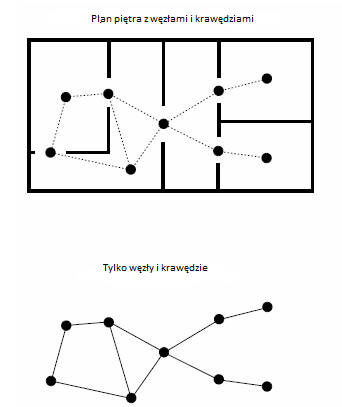
RELIABILITY [NIEZAWODNOĶÆ]
Niezawodnoķæ jest wyrazem tego, jak dobrze i jak dģugo maszyny pracują. Jest to odsetek jednostek, które nadal dziaģają po uŋywaniu ich przez pewien czas. Zaģóŋmy, ŋe 1 stycznia 2010 r. Zostanie uruchomionych 1 000 000 jednostek. Jeķli 920 000 jednostek dziaģa prawidģowo 1 stycznia 2011 r., To niezawodnoķæ wynosi 0,92, czyli 92 procent rocznie. 1 stycznia 2012 r. Moŋna się spodziewaæ, ŋe 920 000 0,92 = 846 400 jednostek będzie dziaģaæ. Liczba jednostek pracujących spada z roku na rok zgodnie ze wspóģczynnikiem niezawodnoķci. Im większa niezawodnoķæ, tym bardziej pģaska jest krzywa zaniku na wykresie jednostek roboczych w funkcji czasu. Jest to pokazane na ilustracji. Pojęcia "doskonaģy", "dobry", "sprawiedliwy" i "zģy" są względne i zaleŋą od wielu czynników. Idealna krzywa niezawodnoķci (100 procent) jest zawsze linią poziomą na takim wykresie. Niezawodnoķæ jest funkcją projektu, jak równieŋ jakoķci częķci i precyzji procesu produkcyjnego. Nawet jeķli maszyna jest dobrze wykonana, a komponenty są dobrej jakoķci, prawdopodobieņstwo awarii jest większe przy zģym projekcie niŋ przy dobrym projekcie. Niezawodnoķæ moŋna zoptymalizowaæ poprzez zapewnienie i kontrolę jakoķci.
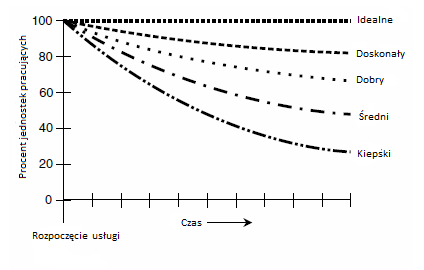
REMOTE CONTROL [ZDALNE STEROWANIE]
Roboty mogą byæ obsģugiwane na odlegģoķæ przez ludzi. Komputerami moŋna równieŋ sterowaæ z miejsc oddalonych od samych maszyn. Odbywa się to za pomocą pilota. Prostym przykģadem systemu zdalnego sterowania jest skrzynka sterownicza telewizora (TV). Innym przykģadem jest nadajnik uŋywany do pilotowania modelu samolotu. Sterowanie telewizorem wykorzystuje promieniowanie podczerwone (IR) do przenoszenia danych. Model samolotu odbiera polecenia za poķrednictwem sygnaģów radiowych. W tym sensie zarówno telewizor, jak i model samolotu to roboty.
Zdalne sterowanie moŋe odbywaæ się za pomocą przewodów, kabli lub ķwiatģowodów. W ten sposób obsģugiwane są roboty podwodne. Osoba siedzi przy terminalu w zaciszu ģodzi lub baņki podwodnej i obsģuguje robota, obserwując ekran, który pokazuje, co "widzi" robot. Jest to prymitywna forma teleobecnoķci. Zasięg pilota jest ograniczony, gdy uŋywane są przewody lub ķwiatģowody. Posiadanie kabla dģuŋszego niŋ kilka kilometrów jest niepraktyczne. Szczególny problem występuje w przypadku zdalnego sterowania podmorskiego na duŋe odlegģoķci. Fale radiowe na konwencjonalnych częstotliwoķciach radiowych nie mogą przenikaæ do oceanów, ale wyjątkowo dģugie kable stwarzają problemy mechaniczne. Gdy stacja kontrolna i robot są bardzo daleko od siebie, pokonanie odlegģoķci nawet przez sygnaģy radiowe, podczerwone lub widzialne zajmuje duŋo czasu. Zdalnie sterowany robot na Księŋycu jest oddalony o okoģo 1,3 sekundy ķwietlnej. Od chwili wysģania polecenia do robota na Księŋycu do momentu, w którym operator zobaczy wyniki polecenia, mija 2,6 s. Jednym z najbardziej dramatycznych przykģadów zdalnego sterowania radiowego jest przekazywanie poleceņ do sond kosmicznych podczas przelotu przez Ukģad Sģoneczny. W takich przypadkach odlegģoķæ separacji jest rzędu milionów kilometrów. Gdy sonda Voyager minęģa Neptuna i wysģano do niej polecenie, wyników nie obserwowano przez wiele godzin. Zdalne sterowanie tego typu to szczególne wyzwanie. Istnieje absolutna granica praktycznej odlegģoķci, jaka moŋe istnieæ między zdalnie sterowanym robotem a jego operatorem. Nie ma (jak dotąd) ŋadnego znanego sposobu przesyģania danych szybciej niŋ prędkoķæ energii elektromagnetycznej (EM) w wolnej przestrzeni.
ROZDZIELCZOĶÆ
Rozdzielczoķæ to zdolnoķæ zrobotyzowanego systemu wizyjnego do rozróŋniania rzeczy znajdujących się blisko siebie. Wewnątrz obiektów rozdzielczoķæ to stopieņ, w jakim system moŋe wydobyæ szczegóģy dotyczące obiektu. Jest to precyzyjna miara jakoķci obrazu. Czasami nazywa się to definicją. W zrobotyzowanym systemie wizyjnym rozdzielczoķæ to "ostroķæ" obrazu. Sģaba rozdzielczoķæ moŋe wynikaæ ze sģabej ostroķci, zbyt maģej liczby pikseli w obrazie lub zbyt maģej szerokoķci pasma sygnaģu. Ilustracja przedstawia dwa obiekty, które są daleko i blisko siebie, tak jak mogą wyglądaæ na system wizyjny robota o czterech róŋnych poziomach rozdzielczoķci. Kiedy obraz analogowy jest konwertowany na postaæ cyfrową, rozdzielczoķæ próbkowania to liczba róŋnych poziomów cyfrowych, które są moŋliwe. Liczba ta jest generalnie potęgą 2. Sygnaģ analogowy ma nieskoņczenie wiele róŋnych poziomów; moŋe zmieniaæ się w ciągģym zakresie. Im wyŋsza rozdzielczoķæ próbkowania, tym dokģadniejsza jest cyfrowa reprezentacja sygnaģu. W wykrywaniu pozycji, a takŋe w wykrywaniu i kreķleniu odlegģoķci, terminy rozdzielczoķæ kierunku i rozdzielczoķæ odlegģoķci odnoszą się do zdolnoķci czujnika robota do rozróŋniania między dwoma obiektami, które są oddzielone maģym kątem lub które znajdują się prawie w tej samej odlegģoķci. termin rozdzielczoķæ przestrzenna odnosi się do najmniejszego przemieszczenia liniowego, nad którym robot moŋe zdefiniowaæ swoje ķrodowisko pracy i skorygowaæ bģędy w swoim ruchu.
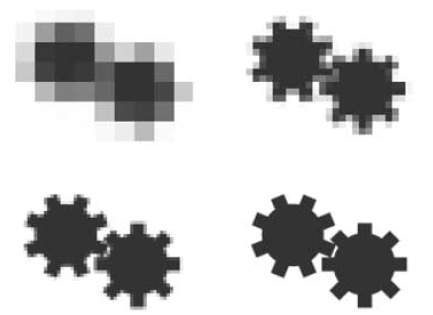
REVERSE ENGINEERING [INŊYNIERIA ODWROTNA]
Moŋliwe jest zbudowanie maszyny, która robi to samo, co inna maszyna, ale przy uŋyciu innego projektu. Kiedy jest to robione z komputerami, nazywa się to klonowaniem. Ogólnie rzecz biorąc, zģoŋone lub wyrafinowane urządzenia lub systemy mają bardziej równowaŋne projekty niŋ proste urządzenia lub systemy. Inŋynieria odwrotna to proces, w którym urządzenie lub system jest kopiowane funkcjonalnie, ale nie dosģownie. Inŋynieria odwrotna rodzi problemy prawne. Jeķli moŋesz powieliæ to, co zrobi opatentowana maszyna, ale zastosujesz nowe i odmienne podejķcie, o którym myķlaģeķ niezaleŋnie, w większoķci przypadków nie naruszysz patentu oryginalnej maszyny. Jeķli wymyķlisz coķ w rodzaju inteligentnego robota, a następnie opatentujesz go, normalnie nie moŋesz uzyskaæ patentu na to, co robi. Na przykģad nie moŋna zaprojektowaæ robota do woskowania rowerów, a następnie oczekiwaæ uzyskania patentu, który uniemoŋliwi innym legalne budowanie i sprzedawanie robota, który moŋe woskowaæ rowery. Ale przypuķæmy, ŋe ktoķ przeprowadzi inŋynierię wsteczną opatentowanego produktu, demontując go, a następnie przebudowując prawie, ale nie do koņca, w ten sam sposób. Ta osoba nie wymyķla nowego projektu. Praca jest uŋywana w nieco, ale nie znacząco, zmienionej formie, a następnie stwierdza się, ŋe otrzymany produkt jest "nowy". Stanowi to naruszenie patentu. Inŋynieria odwrotna, jeķli jest wykonywana zgodnie z prawem, jest waŋna w ewolucji nowych i ulepszonych systemów robotycznych. W badaniach i rozwoju to moŋe byæ cenną techniką w projektowaniu sprzętu, programowaniu i opracowywaniu systemów operacyjnych dla sterowników robotów.
REVOLUTE GEOMETRY [GEOMETRIA OBROTOWA]
Ramiona robotów przemysģowych mogą poruszaæ się na róŋne sposoby, w zaleŋnoķci od ich przeznaczenia. Jeden sposób ruchu jest znany jako geometria obrotowa. Na ilustracji przedstawiono ramię robota zdolne do poruszania się w trzech wymiarach (3-wymiarowe) przy uŋyciu geometrii obrotowej. Caģy zespóģ moŋe obracaæ się o peģny okrąg (360 °) u podstawy. Istnieje poģączenie podnoszące lub "ramię", które moŋe przesuwaæ ramię o 90 °, od poziomu do pionu. Jeden lub dwa przeguby w ķrodku ramienia robota, zwane "ģokciami", mogą poruszaæ się o 180 °, od pozycji prostej do podwójnego oparcia. Opcjonalnie moŋe byæ "nadgarstek", który swobodnie obraca się w prawo lub w lewo. Dobrze zaprojektowane obrotowe ramię robota moŋe dotrzeæ do dowolnego punktu w obrębie póģkuli o ksztaģcie odwróconej miski. Promieņ póģkuli to dģugoķæ ramienia, kiedy jego ramię i ģokieæ (ģokcie) są wyprostowane.
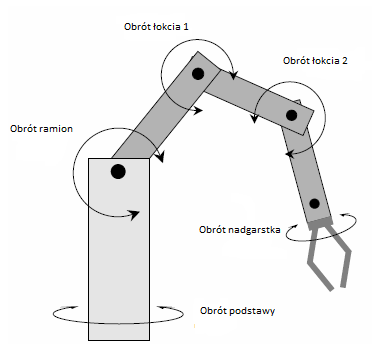
RAMIĘ ROBOTA
Istnieje wiele sposobów projektowania ramienia robota. Róŋne konfiguracje są uŋywane do róŋnych celów. Niektóre roboty, zwģaszcza roboty przemysģowe, to nic innego jak wyrafinowane ramiona robotów. Ramiona robotów są czasami nazywane manipulatorami, chociaŋ technicznie termin ten odnosi się do ramienia i jego efektora koņcowego, jeķli taki istnieje.
Ramię robota moŋna podzieliæ na kategorie wedģug jego geometrii. Projekty dwuwymiarowe (2-W) mają obwiednie robocze ograniczone do odcinka pģaskiej pģaszczyzny Większoķæ ramion robotów moŋe pracowaæ w obszarze przestrzeni trójwymiarowej (3-W). Niektóre ramiona robotów przypominają ręce ludzkie. Poģączenia w tych maszynach mają nazwy takie jak "ramię", "ģokieæ" i "nadgarstek". Jednak niektóre ramiona robotów tak bardzo róŋnią się od ludzkich ramion, ŋe te nazwy nie mają sensu. Ramię, które wykorzystuje geometrię obrotową, jest podobne do ludzkiego ramienia, ale ramię, które wykorzystuje geometrię wspóģrzędnych kartezjaņskich, jest znacznie inne.
ROBOTÓW KLASYFIKACJA
Pod koniec XX wieku Japan Industrial Robot Association (JIRA) sklasyfikowaģo roboty od prostych manipulatorów do zaawansowanych systemów wykorzystujących sztuczną inteligencję (AI). Od low-end do high-end, schemat klasyfikacji robotów JIRA przebiega w następujący sposób:
1. Manipulatory obsģugiwane ręcznie: Maszyny, które muszą byæ obsģugiwane bezpoķrednio przez czģowieka.
2. Manipulatory sekwencyjne: Urządzenia, które wykonują serię zadaņ w tej samej kolejnoķci za kaŋdym razem, gdy są uruchamiane. Dobrym przykģadem jest automatyczna sekretarka.
3. Programowalne manipulatory: Obejmują one prostsze typy robotów przemysģowych, znane większoķci ludzi.
4. Roboty sterowane numerycznie: Przykģadami są roboty serwo.
5. Roboty wyczuwające: roboty wyposaŋone w czujniki dowolnego typu, takie jak przeciwciķnienie, bliskoķæ, nacisk, dotyk lub siģa nadgarstka.
6. Roboty adaptacyjne: roboty, które dostosowują swój sposób pracy, aby kompensowaæ zmiany w swoim ķrodowisku.
7. Inteligentne roboty: roboty z zaawansowanymi kontrolerami, które moŋna uznaæ za posiadające sztuczną inteligencję.
8. Inteligentne systemy mechatroniczne: komputery sterujące flotą robotów lub urządzeniami zrobotyzowanymi.
Niektórzy badacze i inŋynierowie dodają inną kategorię: inteligentne systemy biomechatroniczne. Naleŋą do nich takie urządzenia, jak cyborgi i niektóre protezy.
ROBOTÓW GENERACJE
Inŋynierowie i naukowcy przeanalizowali ewolucję robotów, zaznaczając postęp wedģug generacji robotów.
Pierwsza generacja : Robot pierwszej generacji to proste ramię mechaniczne. Maszyny te mają zdolnoķæ wykonywania precyzyjnych ruchów z duŋą prędkoķcią, wielokrotnie, przez dģugi czas. Takie roboty znajdują dziķ szerokie zastosowanie w przemyķle. Roboty pierwszej generacji mogą pracowaæ w grupach, na przykģad w zautomatyzowanym zintegrowanym systemie produkcyjnym (AIMS), jeķli ich dziaģania są zsynchronizowane. Dziaģanie tych maszyn musi byæ stale nadzorowane, poniewaŋ jeķli wyjdą z ustawienia i pozwolą im dalej pracowaæ, moŋe to skutkowaæ serią zģych jednostek produkcyjnych.
Drugie pokolenie : Robot drugiej generacji ma podstawową inteligencję maszynową. Taki robot jest wyposaŋony w czujniki, które informują go o ķwiecie zewnętrznym. Urządzenia te obejmują czujniki ciķnienia, czujniki zbliŋeniowe, czujniki dotykowe, radar, sonar, ladar i systemy wizyjne. Sterownik przetwarza dane z tych czujników i odpowiednio dostosowuje dziaģanie robota. Urządzenia te weszģy do powszechnego uŋytku okoģo roku 1980. Roboty drugiej generacji mogą pozostawaæ ze sobą zsynchronizowane, bez koniecznoķci ciągģego nadzorowania ich przez czģowieka. Oczywiķcie okresowe sprawdzanie jest potrzebne w przypadku kaŋdej maszyny, poniewaŋ zawsze coķ moŋe pójķæ nie tak; im bardziej zģoŋony system, tym więcej sposobów moŋe dziaģaæ nieprawidģowo.
Trzecia generacja : Koncepcja robota trzeciej generacji obejmuje dwie gģówne ķcieŋki rozwoju technologii inteligentnych robotów: robota autonomicznego i robota-owada. Autonomiczny robot moŋe pracowaæ samodzielnie. Zawiera kontroler i moŋe wykonywaæ wiele czynnoķci bez nadzoru ze strony komputera zewnętrznego lub czģowieka. Dobrym przykģadem tego typu robota trzeciej generacji jest osobisty robot, o którym niektórzy marzą. Istnieją sytuacje, w których autonomiczne roboty nie dziaģają wydajnie. W takich przypadkach moŋna uŋyæ floty prostych robotów-owadów, kontrolowanych przez jeden centralny komputer. Maszyny te dziaģają jak mrówki w mrowisku lub jak pszczoģy w ulu. Podczas gdy poszczególnym maszynom brakuje sztucznej inteligencji (AI), caģa grupa jest inteligentna.
Czwarta generacja i nie tylko : Kaŋdy robot, który dopiero zostanie powaŋnie uruchomiony, to robot czwartej generacji. Przykģadami mogą byæ roboty, które rozmnaŋają się i ewoluują lub zawierają komponenty biologiczne i mechaniczne. Poza tym moŋemy powiedzieæ, ŋe robot piątej generacji to coķ, czego nikt jeszcze nie zaprojektowaģ ani nie wymyķliģ. Tabela podsumowuje generacje robotów, czasy ich rozwoju i ich moŋliwoķci.
Generacja: pierwsze uŋycie: moŋliwoķci
Pierwsza: przed 1980 r .: mechaniczne, stacjonarne, dobra precyzja, duŋa prędkoķæ, wytrzymaģoķæ fizyczna, stosowanie serwomechanizmów, brak czujników zewnętrznych, brak sztucznej inteligencji
Druga: 1980-1990: czujniki dotykowe, systemy wizyjne, czujniki poģoŋenia, czujniki ciķnienia, sterowanie mikrokomputerem, programowalne
Trzecia: poģowa lat 90. i póžniej: mobilny autonomiczny, owadopodobny, sztuczna inteligencja, rozpoznawanie mowy, synteza mowy, systemy nawigacyjne, zdalne sterowanie
Czwarta: Przyszģoķæ: projekt jeszcze się nie rozpocząģ, Czy moŋna odtworzyæ? , Potrafi ewoluowaæ? , Sztucznie ŋywy? , Tak mądry jak czģowiek? , Prawdziwe poczucie humoru?
Piąta:? : Jeszcze nie omówione, Moŋliwoķci nieznane
ROBOTA CHWYTAK
Chwytak robota to wyspecjalizowany efektor koņcowy, który moŋe przybieraæ jedną z dwóch ogólnych postaci: ręczną i inną. Te dwa gģówne schematy wynikają z róŋnych filozofii inŋynierii. Niektórzy badacze twierdzą, ŋe ludzka ręka jest zaawansowanym urządzeniem posiadającym ewoluowaģy w wyniku doboru naturalnego. Dlatego mówią, ŋe inŋynierowie robotyki powinni naķladowaæ ludzkie ręce podczas projektowania i budowy chwytaków robotów. Inni robotycy twierdzą, ŋe naleŋy uŋywaæ specjalistycznych chwytaków, poniewaŋ roboty zwykle wykonują tylko kilka okreķlonych zadaņ. Ludzkie ręce są wykorzystywane do wielu rzeczy, ale taka wszechstronnoķæ moŋe byæ niepotrzebna, a nawet szkodliwa w przypadku robota wykonanego do jednego zadania.
ROBOTIC SHIP [STATEK ZROBOTYZOWANY]
Wspóģczesny samolot pasaŋerski moŋe byæ i w duŋej mierze jest obsģugiwany przez komputer. Mówi się, ŋe taki samolot mógģby wystartowaæ z Nowego Jorku, polecieæ do Sydney i wylądowaæ bez ani jednego czģowieka na pokģadzie. Taki samolot to w istocie robot. W podobny sposób statkami oceanicznymi moŋna sterowaæ za pomocą komputerów. Zautomatyzowany statek moŋe byæ przeznaczony do walki i zbudowany wyģącznie w celu wygrywania bitew na morzu. Bez ludzi na pokģadzie nie byģoby zagroŋenia dla ŋycia ludzkiego. Statek nie wymagaģby ŋadnych udogodnieņ dla ludzi, takich jak pomieszczenia do spania, usģugi gastronomiczne i usģugi medyczne. Jedyną koniecznoķcią byģoby zabezpieczenie sterownika robota przed uszkodzeniem.
Wyobraž sobie, ŋe jesteķ kapitanem niszczyciela i walczysz z innym niszczycielem, na którego pokģadzie nie ma ludzi! Taki wróg nie baģby się ķmierci i dlatego byģby niezwykle niebezpieczny. Roboty odgrywają coraz większą rolę w zastosowaniach wojskowych, ale większoķæ ekspertów wątpi, czy transport pasaŋerski kiedykolwiek zostanie w peģni zrobotyzowany.
ROBOTIC SPACE TRAVEL [PODRÓŊ KOSMICZNA Z ROBOTEM]
Amerykaņski program kosmiczny osiągnąģ punkt kulminacyjny, gdy Apollo 11 wylądowaģ na Księŋycu i po raz pierwszy istota z Ziemi przeszģa na inny ķwiat. Niektórzy uwaŋają, ŋe goķæ z Ziemi równie dobrze mógģ byæ i powinien byæ robotem. Niektóre typy statków kosmicznych byģy zdalnie sterowane od dziesięcioleci. Satelity komunikacyjne uŋywają poleceņ radiowych, aby dostosowaæ swoje obwody i zmieniæ orbity. Sondy kosmiczne, takie jak sfotografowany Voyager. Uran i Neptun w póžnych latach 80. byģy kontrolowane przez radio. Satelity i sondy kosmiczne to prymitywne roboty. Sondy kosmiczne dziaģają jak inne maszyny w wrogim ķrodowisku. Roboty są uŋywane wewnątrz reaktorów jądrowych, w niebezpiecznych kopalniach i na gģębokim morzu. Wszystkie takie roboty dziaģają za pomocą pilota. Systemy zdalnego sterowania stają się coraz bardziej wyrafinowane wraz z rozwojem technologii.
Prawie jak tam
Niektórzy twierdzą, ŋe roboty powinny byæ uŋywane do eksploracji przestrzeni kosmicznej, podczas gdy ludzie bezpiecznie pozostają na Ziemi i pracują z robotami za pomocą teleoperacji lub teleobecnoķci. Czģowiek-operator moŋe nosiæ specjalny kombinezon sterujący i mieæ robota naķladującego wszystkie ruchy. Teleoperacja to prosta operacja zdalnego sterowania robotem. Teleobecnoķæ obejmuje zdalne sterowanie z ciągģym sprzęŋeniem zwrotnym, które daje operatorowi poczucie przebywania w miejscu robota. Niektórzy robotycy uwaŋają, ŋe dzięki technologii zwanej wirtualną rzeczywistoķcią moŋliwe jest odtworzenie wraŋenia przebywania w odlegģej lokalizacji do tego stopnia, ŋe operator robota moŋe sobie wyobraziæ, ŋe naprawdę tam jest. Stereoskopowe systemy wizyjne, sģyszenie obuuszne i prymitywny zmysģ dotyku moŋna powieliæ. Wyobraž sobie, ŋe wchodzisz do cienkiego jak pajęczyna skafandra, wchodzisz do komory i w efekcie egzystujesz na Księŋycu lub Marsie, wolnym od niebezpieczeņstw związanych z ekstremalnymi temperaturami lub ķmiertelnym promieniowaniem.
Gģówny problem
Jeķli roboty są uŋywane w podróŋach kosmicznych z zamiarem zastąpienia astronautów przez maszyny, odlegģoķæ między robotem a jego operatorem nie moŋe byæ bardzo duŋa. Powodem jest to, ŋe sygnaģy sterujące nie mogą poruszaæ się szybciej niŋ 299 792 km / s (186 282 mil / s), czyli prędkoķæ ķwiatģa w wolnej przestrzeni. Księŋyc znajduje się okoģo 400 000 km, czyli 1,3 sekundy ķwietlnej od Ziemi. Gdyby robot, a nie Neil Armstrong, wszedģ na Księŋyc tego letniego dnia 1969 roku, jego operator musiaģby uporaæ się z opóžnieniem 2,6 s między poleceniem a reakcją. Kaŋde polecenie potrzebowaģo 1,3 sekundy, aby dostaæ się na Księŋyc, a kaŋda odpowiedž - 1,3 sekundy, aby wróciæ na Ziemię. Prawdziwa teleobecnoķæ jest niemoŋliwa przy takim opóžnieniu. Eksperci twierdzą, ŋe maksymalne opóžnienie prawdziwej teleobecnoķci wynosi 0,1 s. Odlegģoķæ między robotem a jego kontrolerem nie moŋe więc byæ większa niŋ 0,5 lub 1/20 sekundy ķwietlnej. To okoģo 15 000 km - nieco więcej niŋ ķrednica Ziemi.
Moŋliwy scenariusz
Zaģóŋmy, ŋe astronauci znajdują się na orbicie wokóģ planety, której ķrodowisko jest zbyt nieprzyjazne, aby umoŋliwiæ osobistą wizytę. Następnie moŋna wysģaæ robota. Przykģadem takiej planety jest Wenus, której ciķnienie powierzchniowe miaŋdŋące zabiģoby astronautę w kaŋdym kombinezonie ciķnieniowym moŋliwym przy obecnej technologii. Ģatwo byģoby jednak utrzymaæ orbitę mniejszą niŋ 9300 mil nad Wenus, więc teleobecnoķæ byģaby moŋliwa. Operator mógģ siedzieæ w statku kosmicznym na orbicie nad planetą i mieæ wraŋenie chodzenia po powierzchni.
ROBOTA NOGA
Noga robota to wyrostek podobny do ramienia robota, ale przeznaczony raczej do podpierania i napędzania mobilnego robota niŋ do manipulowania obiektami. Lokomocja na nogach ma zalety, gdy teren w przestrzeni ķwiata robota jest nierówny lub nierówny. Nogi mogą równieŋ umoŋliwiaæ robotom skakanie, siadanie i kopanie przedmiotów. Jednak napędy koģowe lub gąsienicowe są zwykle preferowane w ķrodowiskach roboczych o gģadkich, stosunkowo równych powierzchniach. Ludzie marzyli o budowaniu maszyn na swój wģasny obraz. W rzeczywistoķci humanoidalne roboty prawie zawsze są stworzone do rozrywki. Kiedy roboty mają nogi, problemem jest stabilnoķæ. Robot moŋe się przewróciæ, jeķli musi stanąæ na jednej lub dwóch nogach lub jeķli wszystkie nogi są ustawione w jednej linii. Roboty z nogami mają zwykle cztery lub szeķæ nóg. Nogi mogą byæ niezaleŋnie manewrowane lub mogą poruszaæ się w grupach. Rzadko kiedy wymyķlano roboty z więcej niŋ szeķcioma nogami
ROLL
Roll to jeden z trzech rodzajów ruchu, jakie moŋe wykonaæ robot efektorowy. Jest to rotacyjna forma ruchu, w przeciwieņstwie do pochylenia i odchylenia, które są ruchami do przodu i do tyģu (lub w górę iw dóģ). Wyciągnij rękę prosto i wskaŋ coķ palcem wskazującym. Obróæ nadgarstek. Twój palec wskazujący wciąŋ wskazuje w tym samym kierunku, ale obraca się wraz z nadgarstkiem. Gdyby twój palec wskazujący byģ gģówką ķrubokręta, byģby w stanie obróciæ ķrubę. To jest przykģad roll
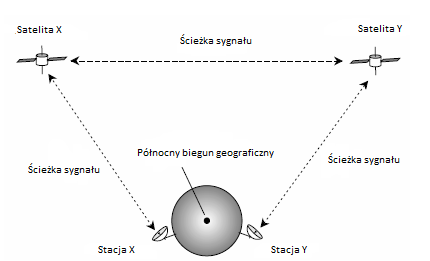
SKALOWANIE
Skalowanie to zasada znana inŋynierom budowlanym i fizykom. Gdy obiekt jest powiększany w jednakowym stopniu we wszystkich wymiarach liniowych, jego integralnoķæ strukturalna maleje. Kiedy rzeczy stają się większe, ale pozostają w tych samych względnych proporcjach, wytrzymaģoķæ mechaniczna wzrasta do kwadratu (druga potęga) wymiaru liniowego - wysokoķæ, szerokoķæ lub gģębokoķæ. Jednak masa roķnie zgodnie z szeķcianem (trzecia potęga) wymiaru liniowego. Na ilustracji pokazano, jak to dziaģa z kostkami. Masa, a tym samym cięŋar w staģym polu grawitacyjnym, roķnie szybciej niŋ zwiększa się wymiar liniowy lub pole przekroju poprzecznego. Ostatecznie, jeķli obiekt stanie się wystarczająco duŋy, stanie się fizycznie niestabilny lub mechanicznie niewykonalny. Rozwaŋmy teoretyczną bryģę szeķcianu o zmiennej wielkoķci, ale doskonale jednorodnej materii. Na ilustracji mniejsza kostka ma wysokoķæ = 1 jednostkę, szerokoķæ = 1 jednostkę i gģębokoķæ = 1 jednostkę. Większy szeķcian jest dwukrotnie większy w kaŋdym wymiarze liniowym: wysokoķæ = 2 jednostki, szerokoķæ = 2 jednostki i gģębokoķæ = 2 jednostki. Powierzchnia podstawy (lub przekroju) mniejszej kostki wynosi 1 jednostkę do kwadratu (1 x 1); objętoķæ mniejszej kostki to 1 jednostka szeķcienna (1 x 1 x1). Podstawa (lub pole przekroju poprzecznego) większej kostki wynosi 4 jednostki do kwadratu (2 x2); objętoķæ wynosi 8 jednostek szeķciennych (2 x 2 x 2). Jeķli kostki są wykonane z tego samego jednorodnego materiaģu, podwojenie wymiaru liniowego podwaja równieŋ wagę na jednostkę powierzchni u podstawy. W miarę jak szeķcian będzie się powiększaģ, w koņcu spadnie lub zapadnie się w powierzchnię, albo zapadnie się pod wģasnym cięŋarem. Wyobraž sobie sytuację z humanoidalnym robotem. Jeķli jego wysokoķæ nagle wzroķnie dziesięciokrotnie, jego powierzchnia przekroju poprzecznego wzroķnie o wspóģczynnik 102 = 100. Jednak jego masa stanie się 103 = 1000 razy większa. To odpowiednik 10-krotnego wzrostu przyspieszenia ziemskiego. Robot zbudowany ze zwykģych materiaģów miaģby trudnoķci z manewrowaniem w takich warunkach i byģby niestabilny. Kolejny 10-krotny wzrost wymiaru liniowego spowodowaģby fizyczny upadek. Dlatego gigantyczne roboty są nieporęczne i niepraktyczne, podczas gdy maģe są stosunkowo wytrzymaģe i trwaģe.
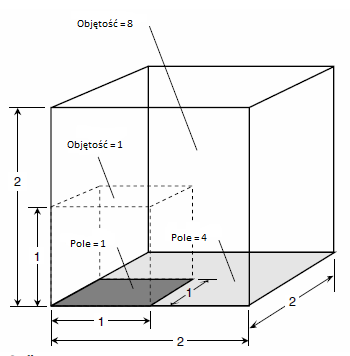
SECURITY ROBOT [ROBOT BEZPIECZEŅSTWA]
Termin robot bezpieczeņstwa odnosi się do kaŋdego robota, który pomaga w ochronie ludzi lub mienia, w szczególnoķci przed przestępczoķcią. Roboty bezpieczeņstwa istnieją od dziesięcioleci. Prostą wersją jest elektroniczny mechanizm otwierania bramy garaŋowej. Jeķli zamkniesz się poza domem, moŋesz uzyskaæ dostęp przez bramę garaŋową, jeķli posiadasz skrzynkę kontrolną. (Tak samo moŋe kaŋdy, kto ma skrzynkę kontrolną, która dziaģa na tej samej częstotliwoķci i ma ten sam kod sygnalizacyjny). Roboty bezpieczeņstwa ķredniego poziomu obejmują systemy alarmowe, elektroniczne otwieracze drzwi / bram wykorzystujące cyfrowe kody oraz róŋne systemy nadzoru. Urządzenia te mogą zniechęciæ nieupowaŋnione osoby do wejķcia na teren posesji. Jeķli ktoķ uzyska dostęp, system ķredniego poziomu moŋe wykryæ obecnoķæ intruza, zwykle za pomocą ultradžwięków, mikrofal lub laserów, i powiadomiæ policję przez telefon lub ģącze bezprzewodowe. Hipotetyczny, wysokiej klasy system bezpieczeņstwa przyszģoķci skģada się z jednego lub więcej mobilnych robotów, które czasami przypominają sģuŋących, a innym razem atakują psy. System zminimalizuje moŋliwoķæ lub celowoķæ wģamania. Jeŋeli do chronionego mienia wejdzie nieuprawniona osoba, roboty ochronne odciągną sprawcę lub zatrzymają go do czasu przybycia policji. Roboty tego typu zostaģy przedstawione w filmach. Z powodu tych filmów niektórzy ludzie wierzą, ŋe takie maszyny pewnego dnia staną się powszechne. Z tym schematem wiąŋe się jednak wiele problemów, tutaj, postawionych w formie pytaņ, podano kilka przykģadów wyzwaņ stojących przed projektantami ostatecznego zrobotyzowanego systemu bezpieczeņstwa.
• Czy takie roboty mogą byæ wystarczająco szybkie i mieæ wystarczająco dobry wzrok, aby ķcigaæ intruza lub wygraæ walkę z czģowiekiem w dobrej kondycji fizycznej?
• Czy takie roboty mogą byæ zaprojektowane do wykrywania intruza w dowolnym momencie?
• Czy takie roboty mogą byæ odporne na manipulacje?
• Czy takie roboty moŋna zaprojektowaæ tak, aby wytrzymaģy atak praktycznie dowolną bronią?
• Jeķli odpowiedž na wszystkie powyŋsze pytania brzmi "tak", czy koszt systemu na tym poziomie będzie kiedykolwiek osiągalny dla przeciętnej rodziny lub maģej firmy?
• Czy wģaķciciele nieruchomoķci będą mogli ufaæ, ŋe ich roboty bezpieczeņstwa będą dziaģaæ przez caģy czas?
• Co się stanie, jeķli robot ulegnie awarii i uzna, ŋe wģaķciciel jest intruzem?
• Czy maszyna moŋe zgodnie z prawem uŋywaæ ķmiercionoķnej siģy?
• Jakie będą konsekwencje, jeķli robot bezpieczeņstwa zrani lub zabije intruza?
SEEING-EYE ROBOT [ROBOT PRZeWODNIK]
Zaproponowano mobilne inteligentne roboty jako potencjalne zamienniki dla psów przewodników. Zaawansowana maszyna moŋe pomóc osobom niedowidzącym w poruszaniu się po otoczeniu. Tak zwany robot-przewodnik musi mieæ system wizyjny o doskonaģej czuģoķci i rozdzielczoķci. Robot musi mieæ sztuczną inteligencję (AI) co najmniej równowaŋną inteligencji psa. Maszyna musi byæ w stanie pokonaæ kaŋdy rodzaj terenu, wykonując tak róŋnorodne czynnoķci, jak przechodzenie przez ulicę, przechodzenie przez zatģoczony pokój lub wchodzenie po schodach. Japoņczycy, podchodzą z entuzjazmem do robotów przypominających ŋywe stworzenia, zaprojektowali róŋne roboty widzące. Są mniej więcej tego samego rozmiaru co ŋywe psy, większoķæ toczy się na koģach lub na gąsienicach.
SELSYN
Selsyn to urządzenie wskazujące, które pokazuje kierunek, w którym obiekt wskazuje. Skģada się z czujnika poģoŋenia i jednostki nadawczej w miejscu urządzenia ruchomego oraz jednostki odbiorczej i wskažnika umieszczonych w dogodnym miejscu. Powszechnym zastosowaniem selsyny jest wskažnik kierunku dla czujnika obrotowego, jak pokazano na ilustracji. W selsynie wskažnik zwykle obraca się o taką samą liczbę stopni kątowych, jak poruszające się urządzenie. Selsyn dla ģoŋysk azymutalnych zwykle obraca się o 360 °; selsyna do ģoŋysk elewacyjnych obraca się o 90o.
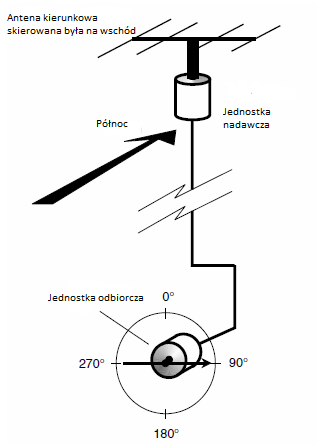
SIEÆ SEMANTYCZNA
Sieæ semantyczna to schemat rozumowania, który moŋna wykorzystaæ w sztucznej inteligencji (AI). W sieci semantycznej obiekty, lokalizacje, dziaģania i zadania nazywane są węzģami. Węzģy są poģączone relacjami. To ģamie rozumowanie w sposób podobny do sposobu, w jaki zdania są przedstawiane w formie diagramów w analizie gramatycznej. Gģówna róŋnica polega na tym, ŋe sieæ semantyczna nie jest ograniczona do jednego zdania; moŋe budowaæ na sobie w nieskoņczonoķæ, tak ŋe reprezentuje coraz bardziej zģoŋone scenariusze. Przykģad sieci semantycznej pokazano na ilustracji. Węzģy to okręgi, a relacje to linie ģączące okręgi. Sytuację moŋna wywnioskowaæ. Moŋna uzupeģniaæ. (Uŋyj swojej wyobražni). Niektórzy badacze uwaŋają, ŋe sieci semantyczne są bardziej wszechstronne niŋ inne popularne narzędzie rozumowania, znane jako systemy eksperckie.
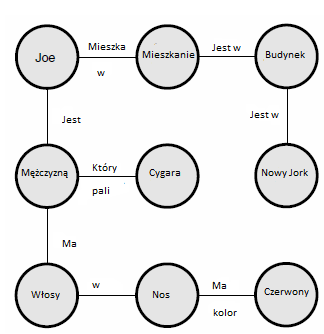
SENSOR COMPETITION [KONKURENCJA CZUJNIKÓW]
W niektórych systemach robotycznych do wykrywania pojedynczego postrzegania lub bodžca w ķrodowisku uŋywany jest więcej niŋ jeden czujnik. Konkurencja czujników polega na uŋyciu dwóch lub więcej nadmiarowych czujników w celu zminimalizowania liczby faģszywie ujemnych i faģszywie dodatnich. Zawsze, gdy do wykrywania jakiegoķ zjawiska lub zdarzenia w ķrodowisku uŋywany jest pojedynczy czujnik, istnieje ryzyko bģędu. Jeķli na wyjķciu czujnika pojawi się proste "tak / nie" (logika 1 lub logika 0), wyjķcie będzie czasami wynosiæ 1, gdy powinno wynosiæ 0 (faģszywie dodatni) lub odwrotnie (faģszywie ujemny). Jeķli czujnik wykryje zakres wartoķci, takich jak natęŋenie ķwiatģa widzialnego, pomiar jest zawsze obarczony pewnym bģędem. Zaģóŋmy, ŋe dwa czujniki z wyjķciem binarnym (1 lub 0) są uŋywane do wykrywania lub pomiaru tego samego zjawiska. Sygnaģ wyjķciowy kombinacji moŋna uznaæ za 1 wtedy i tylko wtedy, gdy wyjķcie obu czujników 1; sygnaģ wyjķciowy kombinacji moŋna uznaæ za 0 wtedy i tylko wtedy, gdy oba czujniki mają wyjķcie 0. Zwykle oba czujniki są zgodne, ale czasami nie. W przypadkach, gdy dwa czujniki się nie zgadzają, kontroler robota moŋe poinstruowaæ czujniki, aby pobraģy kolejne próbki. W przypadku czujników analogowych, takich jak te uŋywane do pomiaru natęŋenia ķwiatģa widzialnego, wyjķcia moŋna uķredniæ, aby uzyskaæ dokģadniejszy odczyt niŋ w przypadku jednego czujnika. Aby uzyskaæ znacznie większe, moŋna zastosowaæ wiele konkurencyjnych czujników dokģadnoķæ niŋ jest to moŋliwe w przypadku pojedynczego czujnika. Generalnie, im większa liczba konkurujących czujników, tym rzadziej będą występowaæ bģędy w binarnym systemie cyfrowym i tym mniejszy będzie bģąd w systemie analogowym. Istnieją róŋne sposoby ģączenia wyjķæ czujników w celu uzyskania wyniku o poŋądanej dokģadnoķci, przy jednoczesnym utrzymaniu rozsądnej szybkoķci systemu.
SENSOR FUSION [FUZJA CZUJNIKÓW]
Termin fuzja czujników odnosi się do jednoczesnego wykorzystania dwóch lub więcej róŋnych typów czujników do analizy obiektu. Przykģady cech, które moŋna zmierzyæ, obejmują masę (lub wagę), objętoķæ, ksztaģt, wspóģczynnik odbicia ķwiatģa, przepuszczalnoķæ ķwiatģa, barwę, temperaturę i teksturę. Fuzja czujników jest wykorzystywana przez inteligentne roboty do identyfikacji obiektów. Kontroler robota moŋe przechowywaæ duŋą bazę danych obiektów i ich unikalnych cech. Gdy obiekt zostanie napotkany, czujniki dostarczają dane wejķciowe i porównują wģaķciwoķci obiektu z informacjami w bazie danych.
STRAŊNIK - ROBOT
Robot straŋnik to wyspecjalizowany rodzaj robota bezpieczeņstwa, który ostrzega ludzi o nienormalnych warunkach. Taki robot moŋna zaprojektowaæ do wykrywania dymu, poŋarów, wģamywaczy czy zalania. Robot wartowniczy moŋe wykryæ nieprawidģową temperaturę, ciķnienie barometryczne, prędkoķæ wiatru, wilgotnoķæ lub zanieczyszczenie powietrza. W przemyķle roboty straŋnicze mogą ostrzegaæ personel o tym, ŋe coķ jest nie tak. Robot moŋe nie dokģadnie zlokalizowaæ i zidentyfikowaæ problem, ale moŋe poinformowaæ ludzi, ŋe system dziaģa nieprawidģowo. Na przykģad poŋar generuje dym i / lub podczerwieņ (IR), z których jedno lub oba mogą zostaæ wykryte przez wędrującego wartownika. Wysokiej klasy robot wartowniczy moŋe zawieraæ takie funkcje, jak:
• Wykrywanie ciķnienia powietrza
• Autonomia
• Nawigacja typu Beacon
• Mapa (e) komputerowa (e) ķrodowiska
• Systemy naprowadzania
• Urządzenia naprowadzające
• Wykrywanie wtargnięæ
• Ladar
• Mobilnoķæ
• Wykrywanie pozycji
• Radar
• Bezprzewodowe poģączenia z kontrolerem i stacją centralną
• Wykrywanie dymu
• Sonar
• Rozpoznawanie mowy
• Wyczuwanie dotykowe
• Wykrywanie temperatury
• Systemy wizyjne
SERWOMECHANIZM
Serwomechanizm to wyspecjalizowane urządzenie sterujące sprzęŋeniem zwrotnym. Serwomechanizmy sģuŋą do sterowania elementami mechanicznymi, takimi jak silniki, mechanizmy sterujące i roboty. Serwomechanizmy są szeroko stosowane w robotyce. Sterownik robota moŋe nakazaæ serwomechanizmowi poruszanie się w okreķlony sposób, który zaleŋy od sygnaģów wejķciowych z czujników. Wiele serwomechanizmów, poģączonych ze sobą i kontrolowanych przez wyrafinowany komputer, moŋe wykonywaæ zģoŋone zadania, takie jak gotowanie posiģku. Zestaw serwomechanizmów, w tym powiązane obwody i sprzęt, przeznaczony do okreķlonego zadania, stanowi serwo system. Systemy serwo wykonują precyzyjne, często powtarzalne, prace mechaniczne. Komputer moŋe sterowaæ serwomechanizmem skģadającym się z wielu serwomechanizmów. Na przykģad bezzaģogowy robot bojowy (znany równieŋ jako dron) moŋna zaprogramowaæ do startu, wykonywania misji, powrotu i lądowania. Systemy serwo moŋna zaprogramowaæ do wykonywania prac przy linii montaŋowej i innych zadaņ, które wymagają powtarzalnych ruchów, precyzji i wytrzymaģoķci. Servo robot to robot, którego ruch jest zaprogramowany w komputerze. Robot postępuje zgodnie z instrukcjami programu i na ich podstawie wykonuje precyzyjne ruchy. Roboty serwo moŋna podzieliæ na kategorie wedģug sposobu, w jaki się poruszają. W ruchu ciągģym mechanizm robota moŋe zatrzymaæ się w dowolnym miejscu na swojej drodze. W ruchu punkt-punkt moŋe zatrzymaæ się tylko w okreķlonych punktach na swojej ķcieŋce. Roboty serwo moŋna ģatwo zaprogramowaæ i przeprogramowaæ. Moŋna tego dokonaæ poprzez wymianę dyskietek, ręczne wprowadzanie danych lub bardziej egzotycznymi metodami, takimi jak pole do nauki.
SHARED CONTROL [WSPÓLNA KONTROLA]
Sterowanie wspóģdzielone, zwane równieŋ ciągģą pomocą, jest formą zdalnego sterowania robotem w systemie wykorzystującym zdalne sterowanie. Operator nadzoruje wykonanie zģoŋonego zadania, takiego jak naprawa satelity podczas misji promu kosmicznego. Czģowiek-operator moŋe przekazaæ robotowi niektóre częķci zadania, ale nadzór musi byæ caģy czas utrzymywany. W razie potrzeby operator moŋe interweniowaæ i przejąæ kontrolę (pomóc) robotowi. Wspólna kontrola ma atuty w niektórych sytuacjach, zwģaszcza w krytycznych misjach. Czģowiek-operator stale monitoruje postęp maszyny. System radzi sobie z nagģymi, nieprzewidzianymi zmianami w ķrodowisku pracy. Kontrola wspóģdzielona ma ograniczenia. Jednemu operatorowi trudno jest nadzorowaæ pracę więcej niŋ jednego robota na raz. Opóžnienie, czyli opóžnienie czasowe spowodowane opóžnieniami w propagacji sygnaģu, utrudnia dwukierunkową teleoperację, jeķli operator i robot znajdują się w duŋej odlegģoķci. Wspólna kontrola jest niepraktyczna, na przykģad w przypadku zdalnego sterowania robotem po drugiej stronie Ukģadu Sģonecznego. Jeszcze innym problemem jest to, ŋe wymagana jest duŋa szerokoķæ pasma sygnaģu w okresach, kiedy czģowiek musi przejąæ bezpoķrednią kontrolę nad robotem. W scenariuszach takich.
SIDE LIGHTING [OĶWIETLENIE BOCZNE]
W zrobotyzowanym systemie wizyjnym termin "oķwietlenie boczne" odnosi się do oķwietlenia obiektów w miejscu pracy za pomocą žródģa ķwiatģa umieszczonego w taki sposób, ŋe scena jest oķwietlana z jednej strony lub z góry lub z doģu. Ķwiatģo ze žródģa rozprasza się z powierzchni obserwowanych obiektów zanim dotrze do czujników. Ponadto robot widzi znaczący efekt cienia w swoim ķrodowisku pracy. Oķwietlenie boczne stosuje się w sytuacjach, w których szczegóģy powierzchni obserwowanych obiektów są interesujące lub istotne. Schemat ten nadaje scenie wraŋenie gģębi ze względu na cienie rzucane przez obiekty. Nieregularnoķci powierzchni ujawniają się szczególnie dobrze, gdy oķwietlenie pada na powierzchnię pod ostrym kątem. (Dobrym przykģadem jest oķwietlenie kraterów w strefie zmierzchu na Księŋycu, widziane przez teleskop, gdy Księŋyc jest w fazie pierwszej lub ostatniej æwiartki). Oķwietlenie boczne nie dziaģa dobrze w sytuacjach, w których występuje póģprzezroczysta lub przedmioty póģprzezroczyste, jeķli trzeba przeanalizowaæ ich strukturę wewnętrzną. W takich przypadkach najlepiej dziaģa podķwietlenie.
SIMPLE-MOTION PROGRAMMING [PROGRAMOWANIE PROSTYCH RUCHÓW]
W miarę jak maszyny stają się inteligentniejsze, programowanie staje się bardziej wyrafinowane. Nie zbudowano jeszcze ŋadnej maszyny, której inteligencja byģaby bliŋsza inteligencji czģowieka. Niektórzy badacze uwaŋają, ŋe prawdziwa sztuczna inteligencja (AI), na poziomie zbliŋonym do ludzkiego mózgu, nigdy nie zostanie osiągnięta. Programowanie robotów moŋna podzieliæ na poziomy, zaczynając od najmniej wyrafinowanego i przechodząc do teoretycznego poziomu prawdziwej sztucznej inteligencji. Rysunek przedstawia czteropoziomowy schemat. Poziom 1, najniŋszy poziom, to proste programowanie ruchu. Roboty na tym poziomie są zaprojektowane do wykonywania podstawowych, często powtarzalnych czynnoķci, takich jak uruchomienie silnika lub podniesienie przedmiotu.
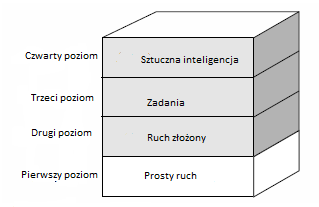
SYMULACJA
Symulacja polega na wykorzystaniu komputerów do naķladowania rzeczywistych sytuacji. Niektóre symulatory obejmują naukę umiejętnoķci obsģugi maszyn. Inne symulatory to programy, które przewidują (lub próbują przewidzieæ) zdarzenia w plikach realnego ķwiata. Interaktywny symulator przypomina wysokiej klasy grę wideo. W rzeczywistoķci komputerowe gry wideo są obecnie bardziej wyrafinowane niŋ niektóre symulacje. Zwykle jest monitor wideo, zestaw elementów sterujących i zestaw wskažników. Mogą byæ równieŋ urządzenia audio i maszyny imitujące ruch. Sterowanie zaleŋy od scenariusza. Zaģóŋmy, ŋe wchodzisz do symulatora, który ma naķladowaæ wraŋenia kierowcy biorącego udziaģ w wyķcigu samochodowym Indy 500. Elementy sterujące obejmują pedaģ przyspieszenia, hamulce i kierownicę. Jest prędkoķciomierz i obrotomierz. Są gģoķniki, które emitują džwięki podobne do tych, które sģyszaģby prawdziwy kierowca. Fotel wibruje i / lub koģysze się w przód iw tyģ. Wyķwietlacz o wysokiej rozdzielczoķci zapewnia perspektywiczny widok wirtualnej drogi, wirtualnych samochodów i wirtualnego otoczenia, gdy przejeŋdŋają. Interaktywna symulacja jest często uŋywana jako pomoc w nauczaniu / szkoleniu zģoŋonych umiejętnoķci, takich jak latanie samolotem. Ta technika jest szczególnie przydatna w wojsku, do treningu wielu róŋnych umiejętnoķci. Symulator zdarzeņ to program komputerowy, który naķladuje lub modeluje zachowanie systemu. Na przykģad, moŋesz chcieæ zaģoŋyæ firmę. Jak dobrze będzie ona dziaģaæ? Zbankrutujesz? Czy zarobisz milion dolarów w pierwszym roku? Symulator zdarzeņ, jeķli jest wystarczająco wyrafinowany i ma wystarczającą iloķæ danych, moŋe pomóc w udzieleniu odpowiedzi na takie pytania. Jednym z najwaŋniejszych symulatorów zdarzeņ jest model prognozowania huraganów stosowany przez National Hurricane Center w Miami na Florydzie. Gdy zbliŋaģ się huragan Andrew w sierpniu 1992 r., Komputery przewidziaģy najbardziej prawdopodobne miejsca wyjķcia na ląd. Andrew wybraģ niezwykģą ķcieŋkę ze wschodu na zachód. Huragany często zakręcają na póģnoc, zanim uderzą w ląd, ale Model Hurricane Center przewidywaģ, ŋe Andrew będzie posuwaģ się na zachód, aŋ minie póģwysep Florydy. Symulator wydarzenia w tym przypadku okazaģ się trafny. Poniewaŋ symulatory zdarzeņ stają się coraz bardziej zaawansowane, będą w coraz większym stopniu wykorzystywaæ sztuczną inteligencję (AI) do wyciągania wniosków, ale zawsze będzie istniaģ element niepewnoķci, który ogranicza skutecznoķæ symulatorów zdarzeņ.
SMART HOME [INTELIGENTNY DOM]
Wyobraž sobie, ŋe wszystkie przyziemne prace domowe są wykonywane bez twojego myķleenia! Komputer domowy mógģby sterowaæ flotą robotów osobistych, które zajmowaģyby się gotowaniem, zmywaniem naczyņ, praniem, utrzymaniem ogrodu, odķnieŋaniem i innymi rzeczami. To jest ostateczna forma skomputeryzowanego domu: posiadanie "centralnego ukģadu nerwowego" sterowanego przez komputer. W branŋy budowlanej skomputeryzowany dom nazywany jest inteligentnym domem.
Technologia i etyka
Kluczem do inteligentnego domu są technologie robotyki i sztucznej inteligencji (AI), które w miarę jak stają się one bardziej dostępne dla przeciętnego konsumenta, moŋemy spodziewaæ się np. Zrobotyzowanych pralni. , zmywaæ, odkurzaæ nasze dywany, odgarniaæ ķnieg z naszych podjazdów i myæ okna. Istnieją dwa gģówne typy robotów mobilnych, które mogą wędrowaæ po domu przyszģoķci: roboty autonomiczne i roboty-owady. Obie konstrukcje mają zalety i wady. Oprócz tego niektóre urządzenia same będą robotami, takie jak zmywarki i pralki. Niektórzy pytają, czy warto rozwijaæ skomputeryzowane, zrobotyzowane domy. Niektórzy ludzie wolą wydaæ cięŋko zarobione pieniądze w inny sposób, na przykģad na wakacje lub zakup nowej nieruchomoķci. Istnieją równieŋ obawy etyczne. Czy niektórzy powinni dąŋyæ do caģkowitej automatyzacji domu, skoro duŋej częķci spoģeczeņstwa w ogóle nie staæ na dom? Zaģóŋmy na chwilę, ŋe rozwiązujemy problem etyczny i ŋe kaŋdy ma dom i trochę pieniędzy do stracenia. Dalej wyobraž sobie, ŋe koszt technologii stale spada, podczas gdy wciąŋ roķnie bardziej wyrafinowane. Co moŋe przynieķæ przyszģoķæ?
Ochrona przed ogniem
Gdy ludzie i mienie muszą byæ chronione przed ogniem, wykrywanie dymu jest prostym i skutecznym ķrodkiem. Czujniki dymu są niedrogie i mogą dziaģaæ na baterie do latarek. Powinieneķ teraz mieæ w domu co najmniej jedno z tych urządzeņ. W skomputeryzowanym domu przyszģoķci czujnik dymu moŋe zaalarmowaæ robota. Roboty są idealne do gaszenia poŋarów, poniewaŋ mogą robiæ rzeczy, które są zbyt niebezpieczne dla ludzi. Wyzwaniem będzie zaprogramowanie robotów tak, aby miaģy ocenę porównywalną z oceną ludzkich straŋaków. Kiedy i czy roboty domowe staną się powszechne, jeden z nich do jego obowiązków będzie naleŋaģo zapewnienie bezpieczeņstwa przebywających w nich ludzi. Obejmuje to wyprowadzenie osób z domu, jeķli się zapali, a następnie ugaszenie poŋaru i / lub wezwanie straŋy poŋarnej. Moŋe równieŋ obejmowaæ wykonywanie prostych czynnoķci z zakresu udzielania pierwszej pomocy.
Bezpieczeņstwo
Komputery i roboty mogą byæ bardzo pomocne w caģym domu, jeķli chodzi o zapobieganie wģamaniom. Roboty bezpieczeņstwa istnieją od dziesięcioleci. Prostą wersją jest elektroniczny mechanizm otwierania drzwi garaŋowych, bardziej zaawansowane systemy obejmują systemy sygnalizacji wģamania i napadu oraz elektroniczne otwieracze drzwi / bram. Wysokiej klasy urządzenia utrudniają wejķcie na teren posesji osobom nieupowaŋnionym. Robot wartowniczy moŋe ostrzec wģaķciciela domu o nietypowych warunkach. Moŋe wykryæ poŋar, wģamywaczy lub wodę. Wartownik moŋe wykryæ nieprawidģową temperaturę, ciķnienie barometryczne, prędkoķæ wiatru, wilgotnoķæ lub zanieczyszczenie powietrza.
Obsģuga gastronomiczna
Roboty mogą przygotowywaæ i podawaæ jedzenie. Do tej pory gģówne zastosowania dotyczyģy powtarzalnych prac, takich jak umieszczanie odmierzonych porcji na talerzach, w stylu stoģówki, aby sģuŋyæ duŋej liczbie osób. Jednak roboty moŋna przystosowaæ do usģug gastronomicznych w zwykģych gospodarstwach domowych. Roboty osobiste, gdy są zaprogramowane do przygotowywania lub podawania posiģków, wymagają większej autonomii niŋ roboty obsģugujące usģugi gastronomiczne na duŋą skalę. Moŋesz wģoŋyæ dysk do domowego robota, który kaŋe mu przygotowaæ posiģek zģoŋony z mięsa, warzyw i napojów, a byæ moŋe takŋe deseru i kawy. Robot zadawaģby Ci pytania, takie jak:
• Ile osób będzie dziķ wieczorem na kolacji?
• Jaki rodzaj mięsa chcesz?
• Jaki rodzaj warzyw?
• Jak chciaģbyķ zrobiæ ziemniaki? A moŋe wolisz ryŋ?
• Jakie napoje chcesz?
Po otrzymaniu wszystkich odpowiedzi robot wykonuje czynnoķci niezbędne do przygotowania posiģku. Robot moŋe sģuŋyæ Ci, gdy będziesz czekaæ przy stole, a następnie sprzątaæ stóģ, gdy skoņczysz jeķæ. Moŋe teŋ zmywaæ naczynia.
Prace ogrodowe
Kosiarki samojezdne i odķnieŋarki będą ģatwe w obsģudze dla robotów. Robot musi tylko siedzieæ na krzeķle, ježdziæ na maszynie i obsģuguje kierownicę / pedaģy. Alternatywnie, kosiarki do trawy lub odķnieŋarki mogą same byæ robotami zaprojektowanymi z myķlą o odpowiednim zadaniu. Gdy robot koszący lub odķnieŋający zacznie swoją pracę, gģównym wyzwaniem jest to, aby wykonywaģ swoją pracę wszędzie tam, gdzie powinien, ale nie gdzie nie powinien. Nie chcesz, aby kosiarka byģa w Twoim ogrodzie, i nie ma sensu zdmuchiwanie ķniegu z trawnika. Przewody przenoszące prąd mogą byæ zakopane na obwodzie twojego podwórka oraz wzdģuŋ krawędzi podjazdu i chodników, wyznaczając granice, w których robot musi pracowaæ. W obszarze roboczym moŋna wykorzystaæ wykrywanie krawędzi, aby ķledziæ linię między skoszoną a nieskoszoną trawą lub między oczyszczoną a nieoczyszczoną nawierzchnią. Ta linia jest ģatwo widoczna z powodu róŋnic w jasnoķci i / lub kolorze. Alternatywnie moŋna uŋyæ mapy komputerowej, a robot moŋe zamiataæ wzdģuŋ kontrolowanych i zaprogramowanych pasków z matematyczną precyzją. Bezczynny wģaķciciel domu Jeķli roboty mogą wykonaæ wszystkie nasze prace domowe, co zostanie nam do zrobienia? Czy ludzie nie będą się nudziæ ŋeglarstwem, wędrówkami, æwiczeniami i innymi sposobami spędzania czasu, który wczeķniej byģ poķwięcony na utrzymanie naszego majątku? Chociaŋ roboty i komputery mogą dla nas pracowaæ, nie musimy ich zatrudniaæ. Zawsze będą chwile, kiedy ludzie będą woleli samodzielnie wykonywaæ prace domowe. Wiele osób lubi zajmowaæ się ogrodnictwem. Byæ moŋe największym wyzwaniem w automatyzacji domu będzie podjęcie decyzji, jakie zadania najlepiej pozostawiæ wģaķcicielom domów. Gģównym problemem związanym z komputeryzacją domu jest kwestia zaufania. Większoķæ ludzi ma doķæ kģopotów z powierzaniem komputerom prostych zadaņ, takich jak przechowywanie danych. Niektórzy ludzie nigdy nie będą czuæ się komfortowo, zostawiając komputer lub system robotyczny caģkowicie zarządzający domem.
SMOKE DETECTION [WYKRYWANIE DYMU]
Gdy ludzie i mienie muszą byæ chronione przed ogniem, wykrywanie dymu jest prostym i skutecznym ķrodkiem. Czujniki dymu są niedrogie i mogą dziaģaæ na baterie do latarek. Dym zmienia charakterystykę powietrza. Towarzyszą temu zmiany względnych iloķci gazów. Ogieņ wypala tlen i wytwarza inne gazy, zwģaszcza dwutlenek węgla. Sam dym się skģada cząstek staģych. Powietrze ma wģaķciwoķæ zwaną staģą dielektryczną. Jest to miara tego, jak dobrze atmosfera moŋe utrzymywaæ ģadunek elektryczny. Powietrze ma równieŋ potencjaģ jonizacji; jest to energia potrzebna do oderwania elektronów od atomów. Wiele rzeczy moŋe wpģywaæ na wģaķciwoķci powietrza. Typowymi czynnikami są wilgotnoķæ, ciķnienie, dym i zmiany względnych stęŋeņ gazów. Czujka dymu moŋe dziaģaæ poprzez wykrywanie zmiany staģej dielektrycznej i / lub potencjaģu jonizacji powietrza. Dwie elektrycznie naģadowane pģytki są oddalone od siebie o ustaloną odlegģoķæ (patrz ilustracja). Jeķli zmieniają się wģaķciwoķci powietrza, pģyty zyskują lub tracą częķæ swojego ģadunku elektrycznego. Powoduje to chwilowe prądy, które mogą uruchamiaæ alarmy lub systemy robotyczne.
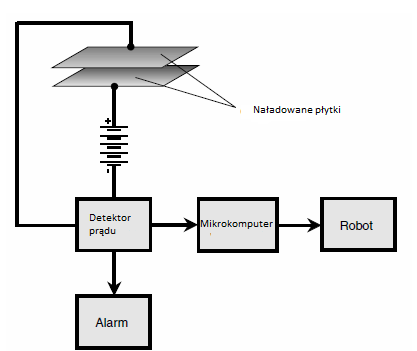
SĢONECZNA ENERGIA
Energię elektryczną moŋna pozyskaæ bezpoķrednio ze ķwiatģa sģonecznego za pomocą ogniw fotowoltaicznych. Większoķæ ogniw fotowoltaicznych, zwanych takŋe ogniwami sģonecznymi, wytwarza okoģo 15 mW mocy na kaŋdy centymetr kwadratowy powierzchni wystawionej na jasne ķwiatģo sģoneczne. Ogniwa sģoneczne wytwarzają prąd staģy (DC), który jest uŋywany w większoķci systemów elektronicznych. Energia sģoneczna jest idealna do stosowania w robotach mobilnych, które dziaģają na zewnątrz, szczególnie w miejscach o duŋym nasģonecznieniu. Samodzielny system zasilania energią sģoneczną jest najbardziej odpowiedni dla robotów mobilnych. Do magazynowania energii elektrycznej dostarczanej przez fotowoltaikę w godzinach nasģonecznienia wykorzystuje baterie akumulatorów, które moŋna ģadowaæ, np. Kwasowo-oģowiowe. Energia jest uwalniana przez baterie w nocy lub w ciemnoķci pogodowe w ciągu dnia. System ten jest niezaleŋny od zakģadu energetycznego. Gģównym ograniczeniem autonomicznego systemu zasilania energią sģoneczną do uŋytku w robotach mobilnych jest fakt, ŋe baterie sģoneczne (kombinacje ogniw sģonecznych poģączonych szeregowo i / lub równolegle) muszą mieæ znaczną powierzchnię wystawioną na dziaģanie sģoņca, aby wytworzyæ wystarczającą moc do obsģugi robotów napędowych. Moŋe to stanowiæ problem projektowy. Interaktywny system zasilania energią sģoneczną jest podģączony do publicznej sieci energetycznej. Ten typ systemu zwykle nie wykorzystuje akumulatorów. Nadmiar energii jest sprzedawany firmom uŋytecznoķci publicznej w porze dziennej i przy minimalnym zuŋyciu. Energię kupuje się od zakģadu w nocy, podczas ponurej pogody w ciągu dnia lub podczas intensywnego uŋytkowania. Schemat ten moŋe byæ uŋywany z robotami stacjonarnymi lub z komputerami przeznaczonymi do sterowania flotami robotów mobilnych.
SONAR
Sonar to metoda pomiaru odlegģoķci o ķrednim i krótkim zasięgu. Termin jest akronimem oznaczającym wykrywanie džwięku i jego zasięg. Podstawowa zasada jest prosta: odbijaæ fale akustyczne od obiektów i mierzyæ czas potrzebny do powrotu echa. W praktyce systemy sonarowe mogą byæ tak wyrafinowane, ŋe konkurują z systemami wizyjnymi w zakresie wykonywania zdjęæ otoczenia.
Sģyszalne a ultradžwiękowe
Sonar moŋe wykorzystywaæ sģyszalne fale džwiękowe, ale zamiast tego uŋywa się ultradžwięków. Ultradžwięki mają częstotliwoķæ zbyt wysoką, aby ludzie mogli ją usģyszeæ, od okoģo 20 kHz do ponad 100 kHz. (Jeden kiloherc, kHz, to 1000 cykli na sekundę). Oczywistą zaletą ultradžwięków w robotyce jest to, ŋe wybuchy fal akustycznych nie są sģyszalne przez osoby pracujące wokóģ robota. Te fale, jeķli są sģyszalne, mogą byæ denerwujące. Kolejną zaletą ultradžwięków nad džwiękiem sģyszalnym jest to, ŋe system wykorzystujący ultradžwięki jest mniej podatny na oszukanie przez rozmawiających ludzi, pracujące maszyny i inne powszechne džwięki. Przy częstotliwoķciach wyŋszych niŋ zasięg ludzkiego sģuchu zaburzenia akustyczne nie występują tak często lub z taką intensywnoķcią, jak w zakresie sģyszenia.
Prosty sonar
Najprostszy schemat sonaru pokazano na schemacie blokowym. Generator impulsów ultradžwiękowych wysyģa impulsy prądu przemiennego (AC) do przetwornika. To przeksztaģca prądy w ultradžwięki, które są wysyģane w wiązce. Wiązka ta odbija się od obiektów w otoczeniu i wraca do drugiego przetwornika, który przeksztaģca ultradžwięki z powrotem w impulsy prądu przemiennego. Te impulsy są opóžnione w stosunku do tych, które zostaģy wysģane. Mierzona jest dģugoķæ opóžnienia, a dane podawane są do mikrokomputera, który okreķla odlegģoķæ do danego obiektu. System ten nie moŋe dostarczyæ szczegóģowego obrazu otoczenia, jeķli nie zostanie dopracowany, a komputer zostanie wģączony do analizy napģywających impulsów. Wiązki sonaru wydają się byæ raczej szerokie; fale akustyczne są trudne do skupienia. Ogranicza to rozdzielczoķæ obrazu, którą moŋna uzyskaæ za pomocą sonaru. Innym problemem związanym z tym prostym systemem jest to, ŋe moŋna go oszukaæ, jeķli opóžnienie echa jest równe lub dģuŋsze niŋ czas między poszczególnymi impulsami.
Udoskonalenia
Naukowcy wiedzą, ŋe wysokiej klasy systemy sonarowe mogą konkurowaæ z systemami wizyjnymi w mapowaniu ķrodowiska, poniewaŋ nietoperze - których "wzrok" jest w rzeczywistoķci sonarem - potrafią nawigowaæ tak dobrze, jakby miaģy bystry wzrok. Co sprawia, ŋe nietoperze tak biegle posģugują się sonarem? Po pierwsze, mają mózg. Wynika z tego, ŋe sztuczna inteligencja (AI) musi byæ waŋną częķcią kaŋdego zaawansowanego robotycznego systemu sonarowego. Komputer musi analizowaæ przychodzące impulsy pod kątem ich fazy, znieksztaģceņ na krawędziach przednich i koņcowych oraz tego, czy powracające echa są strasznymi (iluzjami lub faģszywymi echami). Aby uzyskaæ dobrą rozdzielczoķæ obrazu, wiązka sonaru musi byæ tak wąska, jak to tylko moŋliwe i musi byæ omiatana w dwóch lub trzech wymiarach. Przy optymalnej rozdzielczoķci kierunkowej i odlegģoķci, sonar moŋe wykonaæ mapę komputerową ķrodowiska pracy robota.
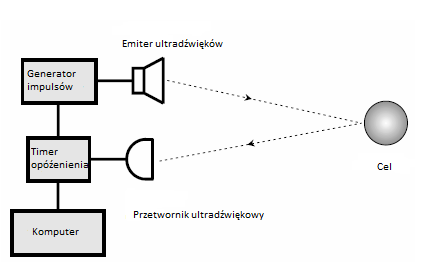
SOUND TRANSDUCER [PRZETWORNIK DŽWIĘKU]
Przetwornik džwięku, zwany równieŋ przetwornikiem akustycznym, to komponent elektroniczny, który przeksztaģca fale akustyczne w inną formę energii lub odwrotnie. Inną formą energii jest zwykle sygnaģ elektryczny prądu przemiennego (AC). Przebiegi sygnaģów akustycznych i elektrycznych są identyczne lub prawie takie same. Przetworniki akustyczne są zaprojektowane dla róŋnych zakresów częstotliwoķci. Widmo ludzkiego sģuchu rozciąga się od okoģo 20 Hz do 20 kHz, ale energia akustyczna moŋe mieæ częstotliwoķci niŋsze niŋ 20 Hz lub wyŋsze niŋ 20 kHz. Energia o częstotliwoķciach poniŋej 20 Hz nazywana jest infradžwiękami; jeķli częstotliwoķæ przekracza 20 kHz, jest to ultradžwięki. W akustycznych urządzeniach bezprzewodowych na ogóģ stosuje się ultradžwięki, poniewaŋ dģugoķæ fali jest krótka, a niezbędne przetworniki mogą byæ maģe. Ponadto nie sģychaæ ultradžwięków, dlatego nie rozpraszają one ani nie denerwują ludzi. Przetworniki džwięku stosowane są w systemach bezpieczeņstwa. Są równieŋ wykorzystywane w robotyce, aby pomóc maszynom mobilnym poruszaæ się w ich otoczeniu. Przetworniki akustyczne są stosowane w aparatach do pomiaru gģębokoķci, powszechnie spotykanych na ģodziach.
SPATIAL RESOLUTION [ROZDIELCZOĶÆ PRZESTRZENNA]
Rozdzielczoķæ przestrzenna jest iloķciową miarą szczegóģowoķci, za pomocą której robot moŋe zdefiniowaæ swoje ķrodowisko pracy. Moŋe byæ wyraŋony w metrach, centymetrach, milimetrach lub mikrometrach (jednostki 10-6 m). W niektórych robotach precyzyjnych moŋe byæ wyraŋony w nanometrach (jednostki 10-9 m). Ķrodek ten moŋe odnosiæ się do jednej z dwóch wielkoķci:
• Najmniejsza odlegģoķæ liniowa między dwoma punktami, którą robot moŋe rozróŋniæ
• Wymiar krawędzi najmniejszej szeķciennej dziaģki przestrzeni, którą robot moŋe zdefiniowaæ
Ogólnie rzecz biorąc, im mniejsza liczba rozdzielczoķci przestrzennej, tym większa dokģadnoķæ, z jaką robot moŋe ustawiæ swój efektor koņcowy (e) lub przemieķciæ się w okreķlone miejsce, oraz tym mniejszy bģąd, który moŋna wykryæ i skorygowaæ. Rozdzielczoķæ przestrzenna systemu robotycznego zaleŋy od rozdzielczoķci kontrolera. Wraz ze wzrostem rozdzielczoķci roķnie wymagana iloķæ pamięci i moc obliczeniowa. W serwomechanizmach rozdzielczoķæ przestrzenna zaleŋy od najmniejszego przemieszczenia, jakie urządzenie moŋe wykryæ
SPEECH RECOGNITION [ROZPOZNAWANIE MOWY]
Gģos ludzki skģada się z energii częstotliwoķci akustycznej (AF), której skģadowe wahają się od okoģo 100 Hz do kilku kiloherców (kHz). (Częstotliwoķæ 1 Hz to jeden cykl na sekundę; 1 kHz = 1000 Hz). Wiadomo o tym odkąd Alexander Graham Bell wysģaģ pierwsze sygnaģy gģosowe przez przewody elektryczne. Poniewaŋ roboty sterowane komputerowo ewoluują, ludzie w naturalny sposób chcą je kontrolowaæ, po prostu rozmawiając z nimi. Umoŋliwia to rozpoznawanie mowy, zwane takŋe rozpoznawaniem gģosu. Ilustracja przedstawia schemat blokowy prostego systemu rozpoznawania mowy.
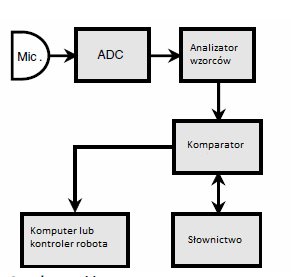
Skģadniki mowy
Przypuķæmy, ŋe mówisz do mikrofonu podģączonego do oscyloskopu i widzisz mieszaninę fal na ekranie. Jak moŋna zaprogramowaæ jakikolwiek komputer, aby nadaæ temu sens? Odpowiedž leŋy w fakcie, ŋe cokolwiek powiesz, skģada się z zaledwie kilkudziesięciu podstawowych džwięków zwanych fonemami. Te fonemy moŋna zidentyfikowaæ za pomocą programów komputerowych. W komunikacji gģos moŋe byæ transmitowany, jeķli szerokoķæ pasma jest ograniczona do zakresu od 300 do 3000 Hz. Niektóre fonemy, takie jak "ssss", zawierają energię o częstotliwoķciach kilku kiloherców, ale wszystkie informacje w gģosie, w tym treķæ emocjonalna, mogą zostaæ przekazane, jeķli pasmo przenoszenia džwięku zostanie odcięte przy 3000 Hz. Jest to typowa odpowiedž częstotliwoķciowa gģosu w radiu dwukierunkowym. Większoķæ energii akustycznej w ludzkim gģosie występuje w trzech okreķlonych zakresach częstotliwoķci, zwanych formantami. Pierwszy formant ma mniej niŋ 1000 Hz. Drugi formant ma zakres od okoģo 1600 do 2000 Hz. Trzeci formant ma zakres od okoģo 2600 do 3000 Hz. Pomiędzy formantami występują przerwy widmowe lub zakresy częstotliwoķci, przy których džwięk jest niewielki lub nie występuje. Formanty i przerwy między nimi pozostają w tych samych zakresach częstotliwoķci bez względu na to, co się powie. Drobne szczegóģy gģosu determinują nie tylko sģowa, ale wszystkie emocje, insynuacje i inne aspekty mowy. Kaŋda zmiana "tonu gģosu" pojawia się na wydruku gģosu. Dlatego w teorii moŋna zbudowaæ maszynę, która rozpoznaje i analizuje mowę, jak równieŋ kaŋdego czģowieka.
Konwersja A / D.
Pasmo przenoszenia lub zakres częstotliwoķci audio przesyģanych w obwodzie moŋna znacznie zmniejszyæ, jeķli chcesz zrezygnowaæ z częķci emocjonalnej zawartoķci gģosu na rzecz wydajnego przesyģania informacji. Umoŋliwia to konwersja analogowo-cyfrowa. Przetwornik analogowo-cyfrowy (ADC) zamienia zmienny ciągģy lub analogowy sygnaģ gģosowy na serię cyfrowych impulsów. Jest to trochę podobne do procesu, w którym zdjęcie jest przeksztaģcane w siatkę kropek do wydrukowania w gazecie. Istnieje kilka róŋnych charakterystyk ciągu impulsów, które moŋna zmieniaæ. Obejmują one amplitudę impulsu, czas trwania impulsu i częstotliwoķæ pulsu. Sygnaģ cyfrowy moŋe przenosiæ ludzki gģos w paķmie przenoszenia mniejszym niŋ 200 Hz. To mniej niŋ jedna dziesiąta pasma przenoszenia sygnaģu analogowego. Ogólnie rzecz biorąc, im węŋsze pasmo, tym więcej treķci emocjonalnych jest poķwięcanych. Treķæ emocjonalna jest przekazywana poprzez fleksję lub zmianę tonu gģosu. Kiedy zanika fleksja, sygnaģ gģosowy przypomina monotonię. Jednak nadal moŋe mieæ pewne subtelne znaczenia i uczucia.
Analiza sģów
Aby komputer mógģ odszyfrowaæ cyfrowy sygnaģ gģosowy, musi mieæ sģownik zawierający sģowa lub sylaby oraz jakieķ ķrodki umoŋliwiające porównanie tej bazy wiedzy z przychodzącymi sygnaģami audio. System ten skģada się z dwóch częķci: pamięci, w której przechowywane są róŋne wzorce mowy; oraz komparator, który porównuje te zapisane wzorce z napģywającymi danymi. Dla kaŋdej sylaby lub sģowa obwód sprawdza swoje sģownictwo aŋ do znalezienia dopasowania. Odbywa się to bardzo szybko, więc opóžnienie nie jest zauwaŋalne. Wielkoķæ sģownictwa komputera jest bezpoķrednio związana z pojemnoķcią pamięci. Zaawansowany system rozpoznawania mowy wymaga duŋej iloķci pamięci. Wyjķcie komparatora musi zostaæ w jakiķ sposób przetworzone, aby maszyna rozpoznaģa róŋnicę między sģowami lub sylabami, które brzmią podobnie. Przykģady to "dwa / teŋ", "droga / waga" i "nie / węzeģ". Aby byģo to moŋliwe, naleŋy zbadaæ kontekst i skģadnię. Komputer musi teŋ mieæ sposób, aby stwierdziæ, czy grupa sylab skģada się z jednego sģowa, dwóch sģów, trzech sģów czy więcej. Im bardziej skomplikowane wprowadzanie gģosowe, tym większa szansa na pomyģkę. Nawet najbardziej zaawansowany system rozpoznawania mowy popeģnia bģędy, tak jak ludzie czasami žle interpretują to, co mówisz. Takie bģędy będą występowaæ rzadziej wraz ze wzrostem pojemnoķci pamięci i szybkoķci dziaģania komputera.
Insynuacje i emocje
ADC w systemie rozpoznawania mowy usuwa niektóre odmiany gģosu. W skrajnym przypadku wszystkie zmiany tonalne zostają utracone, a gģos zostaje zredukowany do "sģyszalnego tekstu". Jest to wystarczające dla większoķci celów związanych z kontrolą robotów. Gdyby system mógģ byæ w 100% niezawodny w prawidģowym okreķlaniu kaŋdego sģowa, inŋynierowie zajmujący się rozpoznawaniem mowy byliby bardzo zadowoleni, jednak gdy dokģadnoķæ zbliŋa się do 100%, roķnie zainteresowanie równieŋ przekazaniem niektórych subtelniejszych znaczeņ. Rozwaŋ zdanie: "Pójdziesz do sklepu po póģnocy" i powiedz je po kolei, kģadąc nacisk na kaŋde sģowo (osiem róŋnych sposobów). Znaczenie zmienia się dramatycznie w zaleŋnoķci od prozodycznych cech twojego gģosu: które sģowo lub sģowa akcentujesz. Ton jest waŋny takŋe z innego powodu: zdanie moŋe byæ stwierdzeniem lub pytaniem. Zatem "Pójdziesz do sklepu po póģnocy?" reprezentuje coķ zupeģnie innego niŋ "Pójdziesz do sklepu po póģnocy!". Nawet jeķli wszystkie tony są takie same, znaczenie moŋe się róŋniæ w zaleŋnoķci od tego, jak szybko coķ zostanie powiedziane. Nawet czas oddechów moŋe mieæ znaczenie.
W celu uzyskania dalszych informacji
Rozpoznawanie mowy to szybko rozwijająca się technologia. Najlepszym žródģem aktualnych informacji jest dobra biblioteka uczelniana. Poproķ bibliotekarza o podręczniki i artykuģy w czasopismach inŋynierskich dotyczące najnowszych osiągnięæ. Wyszukiwanie wyraŋeņ "rozpoznawanie mowy" i "rozpoznawanie gģosu" moŋna przeprowadziæ w Internecie za pomocą Google (www.google.com) lub podobnej wyszukiwarki.
SYNTEZA MOWY
Synteza mowy, zwana takŋe syntezą gģosu, to elektroniczne generowanie džwięków naķladujących ludzki gģos. Džwięki te mogą byæ generowane z tekstu cyfrowego lub z dokumentów drukowanych. Mowa moŋe byæ równieŋ generowana przez komputery wysokiego poziomu, które mają sztuczną inteligencję (AI), w postaci odpowiedzi na bodžce lub dane wejķciowe od ludzi lub innych maszyn.
Co to jest gģos?
Wszystkie sģyszalne džwięki skģadają się z kombinacji fal prądu przemiennego (AC) w zakresie częstotliwoķci od 20 Hz do 20 kHz. (Częstotliwoķæ 1 Hz to jeden cykl na sekundę; 1 kHz = 1000 Hz). Przyjmują one postaæ drgaņ cząsteczek powietrza. Wzorce wibracji moŋna powieliæ jako prądy elektryczne. Pasmo częstotliwoķci od 300 do 3000 Hz jest wystarczająco szerokie, aby przekazaæ wszystkie informacje, a takŋe caģą zawartoķæ emocjonalną gģosem dowolnej osoby. Dlatego syntezatory mowy muszą wydawaæ džwięki w zakresie od 300 do 3000 Hz. Wyzwaniem jest wytwarzanie fal o dokģadnie odpowiednich częstotliwoķciach, we wģaķciwym czasie i we wģaķciwych kombinacjach faz. Modulacja równieŋ musi byæ poprawna, więc ma takie znaczenie przekazane. W ludzkim gģosie gģoķnoķæ i częstotliwoķæ rosną i opadają w subtelny i precyzyjny sposób. Najmniejsza zmiana modulacji moŋe spowodowaæ olbrzymią róŋnicę w znaczeniu tego, co się mówi. Nawet przez telefon moŋna stwierdziæ, czy rozmówca jest niespokojny, zģy czy zrelaksowany. Ŋądanie brzmi inaczej niŋ polecenie. Pytanie brzmi inaczej niŋ stwierdzenie deklaratywne, nawet jeķli sģowa są takie same.
Ton gģosu
W języku angielskim występuje 40 podstawowych džwięków, zwanych fonemami. W niektórych językach jest więcej fonemów niŋ w języku angielskim; niektóre języki mają mniej fonemów. Dokģadny džwięk fonemu moŋe się róŋniæ w zaleŋnoķci od tego, co następuje przed i po nim. Te odmiany nazywane są alofonami. W języku angielskim jest 128 alofonów. Moŋna je ģączyæ na niezliczone sposoby. Inną zmienną w mowie jest fleksja lub "ton gģosu"; zaleŋy to od tego, czy rozmówca jest zģy, smutny, przestraszony, szczęķliwy czy obojętny. Zaleŋą one nie tylko od faktycznych odczuæ mówiącego, ale takŋe od wieku, pģci, wychowania i innych czynników. Gģos moŋe mieæ równieŋ akcent. Prawdopodobnie moŋesz stwierdziæ, kiedy osoba, z którą rozmawiasz, jest zģa lub szczęķliwa, niezaleŋnie od tego, czy pochodzi ona z Teksasu, Indiany, Idaho czy Maine. Jednak niektóre akcenty brzmią bardziej autorytatywnie niŋ inne; niektóre brzmią zabawnie, jeķli wczeķniej nie byģeķ z nimi naraŋony. Wraz z akcentem, wybór uŋycia sģów jest róŋny w róŋnych regionach. To jest dialekt. Dla inŋynierów robotyki wyprodukowanie syntezatora mowy z wiarygodnym "tonem gģosu" jest wyzwaniem.
Nagrywanie i odtwarzanie
Najbardziej prymitywną formą syntezatora mowy jest zestaw nagraņ poszczególnych sģów na taķmie. Sģyszaģeķ je w automatycznych sekretarkach telefonicznych i usģugach. Większoķæ miast ma numer telefonu, pod który moŋesz zadzwoniæ, aby uzyskaæ czas lokalny; niektóre z nich to nagrania sģów. Wszystkie mają charakterystyczny, przerywany džwięk. Systemy te mają kilka wad. Chyba największym problemem jest to, ŋe kaŋde sģowo wymaga osobnego nagrania, na osobnym odcinku taķmy. Te taķmy muszą byæ dostępne mechanicznie, a to wymaga czasu. Niemoŋliwe jest posiadanie duŋego sģownictwa mowy przy uŋyciu tej metody.
Czytanie tekstu
Wydrukowany tekst moŋe zostaæ odczytany przez maszynę za pomocą optycznego rozpoznawania znaków (OCR) i przekonwertowany na standardowy kod cyfrowy o nazwie ASCII. ASCII moŋna przetģumaczyæ za pomocą konwertera cyfrowo-analogowego (DAC) na džwięki gģosu. W ten sposób maszyna moŋe odczytaæ tekst na gģos. Chociaŋ w chwili pisania tego tekstu są one doķæ drogie, są one uŋywane do pomocy niewidomym w czytaniu drukowanego tekstu. Poniewaŋ w języku angielskim jest tylko 128 alofonów, moŋna zaprojektowaæ maszynę do czytania prawie kaŋdego tekstu, jednak maszyny nie mają pojęcia, które odmiany są najlepsze dla róŋnych scen, które pojawiają się w opowieķci. rzadko jest to problem, ale w czytaniu historii dziecku kluczowe znaczenie ma wyobraŋenie psychiczne. Jest jak wyimaginowany film, wspomagany przez emocje czytelnika. Ŋadna jeszcze wymyķlona maszyna nie jest w stanie malowaæ obrazów ani wywoģywaæ nastrojów w umyķle sģuchacza, a takŋe istoty ludzkiej. Te rzeczy wynikają z kontekstu. Ton zdania moŋe zaleŋeæ od tego, co wydarzyģo się w poprzednim zdaniu, akapicie lub rozdziale. Technologia jest daleka od zapewnienia maszynie moŋliwoķci zrozumienia i docenienia dobrej historii, ale nic poza tym poziomem sztucznej inteligencji nie stworzy ŋywego "filmu fabularnego" w umyķle sģuchacza.
Proces
Istnieje kilka sposobów zaprogramowania maszyny do wytwarzania mowy. Na ilustracji przedstawiono uproszczony schemat blokowy jednego procesu. Niezaleŋnie od metody uŋywanej do syntezy mowy konieczne są okreķlone kroki. Są to następujące:
• Maszyna musi uzyskaæ dostęp do danych i uporządkowaæ je we wģaķciwej kolejnoķci.
• Allofony muszą byæ przypisane w odpowiedniej kolejnoķci.
• Naleŋy wprowadziæ odpowiednie przegięcia.
• Przerwy muszą byæ wstawiane w odpowiednich miejscach.
Oprócz powyŋszego, w celu zwiększenia wszechstronnoķci i realizmu moŋna doģączyæ takie funkcje, jak następujące:
• W róŋnych momentach moŋna przekazaæ zamierzony nastrój (radoķæ, smutek, nagģa potrzeba itp).
• Moŋna zaprogramowaæ ogólną wiedzę na temat treķci. Na przykģad maszyna moŋe poznaæ znaczenie opowieķci i znaczenie kaŋdej częķci opowieķci.
• Maszyna moŋe mieæ funkcję przerywania, aby umoŋliwiæ rozmowę z czģowiekiem. Jeķli czģowiek coķ powie, maszyna zatrzyma się i zacznie sģuchaæ z systemem rozpoznawania mowy.
Ta ostatnia funkcja mogģaby okazaæ się interesująca, gdyby dwa komputery, oba wyposaŋone w sztuczną inteligencję, syntezę mowy i rozpoznawanie mowy, wdaģy się w kģótnię. Jedną maszynę moŋna zaprogramowaæ jako republikanina, a drugą jako demokratę; inŋynier mógģby poruszyæ temat podatków i pozwoliæ obu maszynom na kģótnię.
W celu uzyskania dalszych informacji
Najlepszym žródģem aktualnych informacji na temat syntezy mowy jest dobra biblioteka uczelniana. Wyszukiwanie fraz "synteza mowy" i "synteza gģosu" moŋna przeprowadziæ w Internecie za pomocą Google (www.google.com) lub podobnej wyszukiwarki.
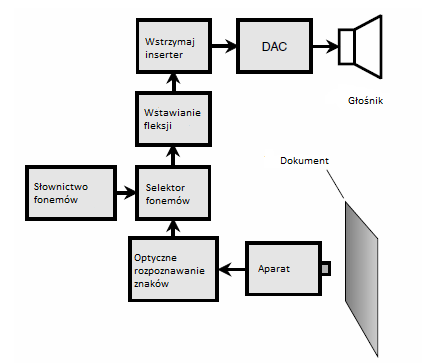
SFERYCZNYCH WSPÓĢRZĘDNYCH GEOMETRIA
Sferyczna geometria wspóģrzędnych to schemat prowadzenia ramienia robota w trzech wymiarach. Sferyczny ukģad wspóģrzędnych jest czymķ w rodzaju ukģadu biegunowego, ale ma dwa kąty zamiast jednego. Oprócz dwóch kątów istnieje wspóģrzędna promienia. Jeden kąt, nazywany x, jest mierzony w kierunku przeciwnym do ruchu wskazówek zegara od osi odniesienia. Wartoķæ x moŋe wynosiæ od 0o do 360o. Moŋesz pomyķleæ o x jako podobnym do namiaru azymutu uŋywanego przez astronomów i nawigatorów, z wyjątkiem tego, ŋe jest mierzony w kierunku przeciwnym do ruchu wskazówek zegara, a nie zgodnie z ruchem wskazówek zegara. Gdy promieņ obraca się wokóģ peģnego koģa przez wszystkie moŋliwe wartoķci x, definiuje pģaszczyznę odniesienia. Drugi kąt, nazywany y, jest mierzony w górę lub w dóģ od pģaszczyzny odniesienia. Wartoķæ y idealnie mieķci się w zakresie od -90o (prosto w dóģ) do + 90o (prosto w górę). Strukturalne ograniczenia ramienia robota mogą ograniczyæ dolną granicę tego zakresu do okoģo -70o. Moŋesz myķleæ o y jako o wysokoķci nad lub pod horyzontem. Promieņ, oznaczony r, jest nieujemną liczbą rzeczywistą (zero lub większą). Moŋna go podaæ w jednostkach, takich jak centymetry, milimetry lub cale. Ilustracja przedstawia ramię robota wyposaŋone w sferyczną geometrię wspóģrzędnych. Ruchy x, y i r nazywane są odpowiednio rotacją podstawy, uniesieniem i zasięgiem.
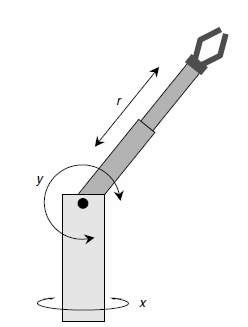
STADYMETRIA
Stadymetria to metoda, której robot moŋe uŋyæ do zmierzenia odlegģoķci do obiektu, gdy znana jest wysokoķæ, szerokoķæ lub ķrednica obiektu. System wizyjny i kontroler ustalają ķrednicę kątową obiektu. Musi byæ znany liniowy wymiar obiektu. Odlegģoķæ moŋna następnie obliczyæ za pomocą trygonometrii.
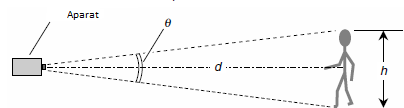
Ilustracja przedstawia przykģad stadymetrii, poniewaŋ moŋna jej uŋyæ do pomiaru odlegģoķci d, w metrach, od kamery robota do osoby. Zaģóŋmy, ŋe znany jest wzrost osoby h wyraŋony w metrach. System wizyjny okreķla kąt, pod jakim dana osoba znajduje się w polu widzenia. Na podstawie tych informacji odlegģoķæ d oblicza się wedģug następującego wzoru:
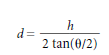
Jeķli odlegģoķæ d jest duŋa w porównaniu z wysokoķcią h, moŋna zastosowaæ prostszy wzór:

Aby stadymetria byģa dokģadna, oķ wymiaru liniowego (cale) ,w tym przypadku oķ przedstawiająca wzrost osoby, h) musi byæ prostopadģa do linii między systemem wizyjnym a ķrodkiem obiektu. Ponadto waŋne jest, aby d i h byģy wyraŋane w tych samych jednostkach.
STATYCZNA STABILNOĶÆ
Stabilnoķæ statyczna to zdolnoķæ robota do utrzymania równowagi podczas postoju. Robot z dwoma lub trzema nogami lub poruszający się na dwóch koģach ma zwykle sģabą stabilnoķæ statyczną. Moŋe byæ w porządku, dopóki się porusza, ale gdy przychodzi do odpoczynku, ģatwo moŋe się przewróciæ. Rower jest przykģadem maszyny o dobrej stabilnoķci dynamicznej (w trakcie toczenia jest w porządku), ale sģabej stabilnoķci statycznej (w spoczynku sam nie stanie). Aby robot dwunoŋny lub trójnoŋny miaģ doskonaģą stabilnoķæ statyczną, potrzebuje wyczucia równowagi. Moŋesz staæ nieruchomo i nie przewracaæ się, poniewaŋ masz ten zmysģ. Jeķli twoje poczucie równowagi jest zaburzone, przewrócisz się. Trudno jest zbudowaæ dobre poczucie równowagi w dwukoģowym lub dwunoŋnym robocie. Jednak udaģo się to i chociaŋ technologia jest droga, obiecuje przyszģoķæ.
SILNIK KROKOWY
Silnik krokowy to silnik elektryczny, który obraca się w maģych krokach, a nie w sposób ciągģy. Silniki krokowe są szeroko stosowane w robotach.
Krokowy kontra konwencjonalny
Gdy prąd elektryczny jest doprowadzany do konwencjonalnego silnika, waģ obraca się w sposób ciągģy z duŋą prędkoķcią. W przypadku silnika krokowego waģek obraca się trochę, a następnie zatrzymuje się. Kąt kroku lub zakres kaŋdego obrotu zmienia się w zaleŋnoķci od konkretnego silnika. Moŋe wynosiæ od mniej niŋ 1o ģuku do æwiartki koģa (900). Konwencjonalne silniki pracują bez przerwy, dopóki do cewek doprowadzany jest prąd elektryczny. Silnik krokowy obraca się o kąt kroku, a następnie zatrzymuje się, nawet jeķli prąd jest utrzymywany. W rzeczywistoķci, gdy silnik krokowy jest zatrzymywany przez prąd pģynący przez jego cewki, waģ jest odporny na obracanie się. Silnik krokowy ma wbudowane hamulce. Jest to ogromna zaleta w robotyce; zapobiega przemieszczaniu się ramienia robota w przypadku przypadkowego uderzenia. Konwencjonalne silniki pracują z setkami, a nawet tysiącami obrotów na minutę (rpm). Typowa prędkoķæ to 3600 obr / min lub 60 obrotów na sekundę (obr / s). Jednak silnik krokowy zwykle dziaģa mniej niŋ 180 obr / min lub 3 obroty na sekundę. Często prędkoķæ jest znacznie wolniejsza. Nie ma dolnej granicy; ramię robota moŋna zaprogramowaæ tak, aby poruszaģo się tylko o 10 dziennie, jeķli wymagana jest tak maģa prędkoķæ. W tradycyjnym silniku moment obrotowy lub siģa obracania wzrasta, gdy silnik pracuje szybciej, jednak w przypadku silnika krokowego moment obrotowy maleje, gdy silnik pracuje szybciej. Z tego powodu silnik krokowy ma największą moc obrotową, gdy pracuje z maģą prędkoķcią. Generalnie silniki krokowe mają mniejszą moc niŋ silniki konwencjonalne.
Dwufazowe i czterofazowe
Najpopularniejsze silniki krokowe są dwojakiego rodzaju: dwufazowe i czterofazowe. Dwufazowy silnik krokowy ma dwie cewki, zwane fazami, sterowane czterema przewodami. Czterofazowy silnik krokowy ma cztery fazy i osiem przewodów. Silniki są stopniowane poprzez sekwencyjne przykģadanie prądu do faz. Na ilustracji przedstawiono schematyczne schematy dwufazowych i czterofazowych silników krokowych. Kiedy prąd pulsujący jest dostarczany do silnika krokowego, z prądem wirującym przez fazy, silnik obraca się stopniowo, po jednym kroku dla kaŋdego impulsu. W ten sposób moŋna utrzymaæ precyzyjną prędkoķæ. Ze względu na efekt hamowania prędkoķæ ta jest staģa dla szerokiego zakresu mechanicznych oporów skrętu. Większoķæ silników krokowych moŋe pracowaæ z częstotliwoķcią impulsów do okoģo 200 na sekundę.
Kontrola
Silniki krokowe moŋna sterowaæ za pomocą mikrokomputerów. Kilka silników krokowych, wszystkie pod kontrolą jednego mikrokomputera, jest typowych dla ramion robotów o kaŋdej geometrii. Silniki krokowe są szczególnie dobrze przystosowane do ruchu punkt-punkt. Skomplikowane, skomplikowane zadania mogą byæ wykonywane przez ramiona robotów przy uŋyciu silników krokowych sterowanych oprogramowaniem. Zadanie moŋna zmieniæ, zmieniając oprogramowanie. Moŋe to byæ tak proste, jak uruchomienie nowego programu za pomocą wypowiedzianego lub wpisanego polecenia.
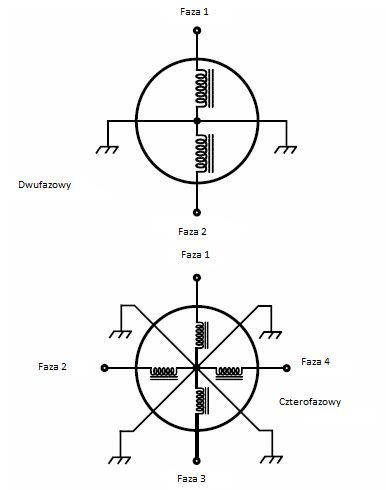
SUBMARINE ROBOT [ROBOT PODWODNY]
Ludzie, nurkowie akwalungowi nie mogą normalnie zejķæ na poziomy gģębsze niŋ okoģo 300 m. Rzadko schodzą poniŋej 100 m. Nawet na tej gģębokoķci konieczny jest ŋmudny okres dekompresji, aby zapobiec chorobie lub ķmierci z "choroby kesonowej". Nic dziwnego, ŋe istnieje duŋe zainteresowanie opracowywaniem robotów, które mogą nurkowaæ na gģębokoķci ponad 300 m, wykonując wszystkie lub większoķæ rzeczy, które mogą robiæ nurkowie. Idealny robot do ģodzi podwodnych wykorzystuje teleobecnoķæ. To jest zaawansowana forma zdalnego sterowania, w której operator ma wraŋenie "bycia robotem". Wyobraž sobie wyprawę w poszukiwaniu skarbów, podczas której wydobywasz diamenty, szmaragdy i zģote monety z zatopionego galeonu 1000 m pod powierzchnią morza, siedząc w ciepģym i suchym fotelu ze zdalnym sterowaniem. Wyobraž sobie testowanie repelentów rekinów bez strachu. Wyobraž sobie rozbrojenie zatopionej gģowicy na dnie gģębokiej zatoki lub naprawę gģębinowej stacji obserwacyjnej. Pozostaģoķci Titanica, "niezatapialnego" liniowca oceanicznego, który zatonąģ po zderzeniu z górą lodową, zostaģy znalezione i sfotografowane przez podwodnego robota zwanego zdalnie sterowanym pojazdem (ROV). Ta maszyna nie posiadaģa teleobecnoķci, ale korzystaģa z teleoperacji i zapewniaģa wiele wysokiej jakoķci zdjęcia wraku statku. Specjalistyczna forma ROV nazywana jest autonomicznym pojazdem podwodnym (AUV). To urządzenie jest wyposaŋone w kabel, przez który przechodzą sygnaģy sterujące i dane odpowiedzi. W zastosowaniach podwodnych sterowanie radiowe nie jest moŋliwe, poniewaŋ woda blokuje pola elektromagnetyczne. Kabel moŋe wykorzystywaæ sygnaģy elektryczne lub sygnaģy ķwiatģowodowe. Alternatywną, bezprzewodową metodą zdalnego sterowania robotami podwodnymi jest ultradžwięki. Jeden rodzaj AUV to latająca gaģka oczna. Jest to w zasadzie kamera z silnikami zaburtowymi.
SURGICAL ASSISTANCE ROBOT [ROBOT POMOCY CHIRURGICZNEJ]
Roboty znalazģy swoją rolę w niektórych procedurach chirurgicznych. Urządzenia robotyczne są stabilniejsze i moŋna nimi manipulowaæ dokģadniej niŋ jakakolwiek ludzka ręka. Wiercenie w czaszce to jedna z aplikacji, do której wykorzystano roboty. Technikę tę zapoczątkowaģ dr Yik San Kwo, inŋynier elektryk w Memorial Medical Center w poģudniowej Kalifornii. Urządzenie wiertnicze jest pozycjonowane za pomocą oprogramowania pochodzącego ze skomputeryzowanego skanowania rentgenowskiego, zwanego skanem komputerowej tomografii osiowej (CAT), mózgu. Caģa operacja robota jest nadzorowana przez chirurga-czģowieka. Zaproponowano liczne zastosowania robotów w chirurgii. Jednym z bardziej obiecujących pomysģów jest uŋycie zdalnie sterowanego robota sterowanego rękami chirurga. Chirurg obserwuje zabieg wykonując ruchy, ale faktyczny kontakt z pacjentem jest w caģoķci wykonywany przez maszynę. Ludzkie ręce zawsze trochę drŋą. W miarę zdobywania doķwiadczenia chirurg starzeje się, a drŋenie wzrasta. Teleoperowany robot wyeliminowaģby ten problem, umoŋliwiając chirurgom z duŋym doķwiadczeniem (ale ograniczoną zręcznoķcią) operacje krytyczne.
SYNCHRO
Synchro to specjalny rodzaj silnika, uŋywany do zdalnego sterowania urządzeniami mechanicznymi. Skģada się z generatora i silnika odbiornika. Podczas obracania waģu generatora waģ silnika odbiornika podąŋa dokģadnie wzdģuŋ. W robotach synchros znajduje wiele róŋnych zastosowaņ. Są szczególnie dobrze przystosowane do drobnych ruchów, a takŋe do teleoperacji. Prosty synchro, uŋywany do wskazywania kierunku, nazywany jest selsynem. Niektóre urządzenia synchro są programowalne. Operator wprowadza liczbę do generatora synchronizacji, a odbiornik odpowiednio zmienia pozycję. Komputery umoŋliwiają programowanie sekwencji ruchów. Umoŋliwia to zģoŋoną, zdalną obsģugę robota.
SKĢADNIA
Skģadnia odnosi się do sposobu, w jaki zdanie, pisane lub mówione, jest skģadane razem. Jest to waŋne w rozpoznawaniu i syntezie mowy. Jest to równieŋ waŋne w programowaniu komputerów. Kaŋdy język wysokiego poziomu ma swoją wģasną, unikalną skģadnię. Uczyģaķ się struktury zdaņ na lekcjach gramatyki polskiej w gimnazjum. Większoķæ uczniów uwaŋa to za nudne, ale moŋe to byæ fascynujące, jeķli masz dobrego nauczyciela. Tworzenie diagramów zdaņ jest jak praca z logiką matematyczną - komputery są w tym dobre. Niektórzy inŋynierowie spędzają swoją karierę na odkrywaniu nowych i lepszych sposobów ģączenia ludzkiego języka z komputerami. Istnieje kilka podstawowych form zdaņ; wszystkie zdania moŋna zaklasyfikowaæ do jednej z tych form. Na przykģad zdanie "Jan podnosi tacę" moŋe nazywaæ się SVO dla tematu / czasownika / przedmiotu. "Jan" to podmiot, "podnosi" to czasownik, a "t" to dopeģnienie. Róŋne języki mają róŋne reguģy skģadni. W języku rosyjskim "lubię cię" jest powiedziane jako "lubisz". Oznacza to, ŋe zdanie SVO to tak naprawdę SOV. Znaczenie jest jasne, o ile znane są reguģy skģadni. Jeķli jednak reguģy skģadni nie są znane, moŋna straciæ znaczenie. Projektując robota, który potrafi rozmawiaæ z ludžmi, inŋynierowie muszą zaprogramowaæ w kontrolerze reguģy skģadniowe, w przeciwnym razie robot mógģby wydawaæ bezsensowne stwierdzenia lub bģędnie interpretowaæ wypowiedzi ludzi.
Termin wyczuwanie dotykowe odnosi się do róŋnych elektromechanicznych metod symulacji zmysģu dotyku ludzkiego. Obejmują one zdolnoķæ wykrywania i pomiaru ciķnienia, siģy liniowej, momentu obrotowego, temperatury i tekstury powierzchni. Niektórzy robotycy uwaŋają czujniki dotykowe za drugie pod względem waŋnoķci po systemach wizyjnych.
TASK ENVIRONMENT [ĶRODOWISKO ZADAŅ]
Termin ķrodowisko zadaniowe odnosi się do charakterystyki przestrzeni, w której dziaģa robot lub grupa robotów. Ķrodowisko zadaniowe nazywane jest równieŋ przestrzenią ķwiata. Charakter ķrodowiska zadaniowego zaleŋy od wielu czynników, które często oddziaģują na siebie. Niektóre rzeczy wpģywają na ķrodowisko zadaņ
• Charakter pracy, jaką musi wykonaæ robot (y)
• Projekt robota (ów)
• Szybkoķæ, z jaką pracują robot (y)
• Ile robotów jest w okolicy
• Czy ludzie pracują z robotem (-ami)
• Czy obecne są niebezpieczne materiaģy
• Czy jakakolwiek praca jest niebezpieczna
Autonomiczny robot moŋe skorzystaæ z komputerowej mapy swojego ķrodowiska zadaniowego. Zminimalizuje to niepotrzebne ruchy i zmniejszy ryzyko wpadek, takich jak upadek robota ze schodów lub uderzenie przez okno. Kiedy robot jest zakotwiczony w jednym miejscu, podobnie jak wiele robotów przemysģowych, ķrodowisko zadaņ nazywane jest obwiednią roboczą.
TASK-LEVEL PROGRAMMING [PROGRAMOWANIE NA POZIOMIE ZADANIA]
W miarę jak maszyny stają się inteligentniejsze, programowanie staje się bardziej wyrafinowane. Nie zbudowano jeszcze ŋadnej maszyny, której inteligencja byģaby bliŋsza inteligencji czģowieka. Niektórzy badacze uwaŋają, ŋe prawdziwa sztuczna inteligencja (AI), na poziomie zbliŋonym do ludzkiego mózgu, nigdy nie zostanie osiągnięta. Programowanie robotów moŋna podzieliæ na poziomy, zaczynając od najmniej wyrafinowanego i przechodząc do teoretycznego poziomu prawdziwej sztucznej inteligencji. Rysunek przedstawia czteropoziomowy schemat. Poziom 3, tuŋ poniŋej AI, nazywany jest programowaniem na poziomie zadaņ. Jak sama nazwa wskazuje, programy na tym poziomie obejmują caģe zadania, takie jak gotowanie posiģków, koszenie trawnika czy sprzątanie domu. Programowanie na poziomie zadaņ znajduje się tuŋ nad hierarchią z planowania zģoŋonego ruchu, ale poniŋej poziomu zaawansowania ogólnie uwaŋanego za sztuczną inteligencję.
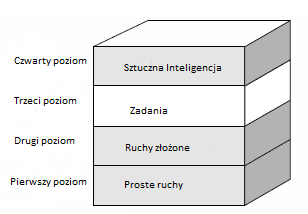
TABLICA NAUCZANIA
Gdy ramię robota musi wykonywaæ powtarzalne, precyzyjne, zģoŋone ruchy, ruchy moŋna wprowadziæ do pamięci sterownika robota. Następnie po uzyskaniu dostępu do pamięci ramię robota wykonuje wszystkie odpowiednie ruchy. Panel uczenia to urządzenie, które wykrywa i zapamiętuje ruchy lub procesy do póžniejszego przywoģania. W czteropoziomowej hierarchii programowania pokazanej na rysunku dla PROGRAMOWANIA NA POZIOMIE ZADANIA, pierwszy i drugi poziom są zwykle programowane w okienkach uczenia. W niektórych przypadkach moŋna zaprogramowaæ prymitywną formę trzeciego poziomu. Przykģadem urządzenia uczącego poziomu 1 jest automatyczny otwieracz / samozamykacz bramy garaŋowej, który po otrzymaniu sygnaģu z pilota otwiera lub zamyka bramę. Innym przykģadem moduģu uczącego poziomu 1 jest pilot zdalnego sterowania uŋywany do zmiany kanaģu i regulacji gģoķnoķci w telewizorze. Przykģadem panelu uczącego poziomu 2 jest mikrokomputer, który steruje automatyczną sekretarką. Kiedy przychodzi poģączenie, sekwencja operacji jest przywoģywana z pamięci mikrokomputera. Urządzenie odbiera telefon, ogģasza komunikat, odbiera wiadomoķæ i resetuje się do następnego poģączenia przychodzącego. Przeprogramowalne moduģy uczące są szeroko stosowane w robotach przemysģowych. Ruchy ramion moŋna wprowadzaæ za pomocą przycisków. W niektórych przypadkach moŋliwe jest ręczne kierowanie ramieniem robota (czyli "uczenie" go) i zapamiętanie sekwencji ruchów w celu wykonania okreķlonego zadania. Tor ramienia, zmiany prędkoķci, obroty i ruchy chwytania / chwytania są programowane, gdy ramię jest "nauczane". Następnie, po przywoģaniu pamięci, ramię robota zachowuje się tak, jak zostaģo "nauczone".
TECHNOCENTRYZM
W XX wieku ludzie coraz bardziej polubili komputery, maszyny i urządzenia elektroniczne. Oczekuje się, ŋe ten trend się utrzyma. Gadŋety mogą byæ fascynujące. Technocentryzm odnosi się do ŋywego zainteresowania technologią ze strony jednostek, grup i spoģeczeņstw. W skrajnych przypadkach moŋe to oczywiķcie staæ się obsesją. Entuzjazm dla technologii moŋe prowadziæ do ekscytujących i satysfakcjonujących karier, ale jeķli pójdzie za daleko, moŋe wytrąciæ z równowagi ŋycie. Niektórzy technocentrycy mają trudnoķci w kontaktach z innymi ludžmi, a krytycy postępu technologicznego twierdzą, ŋe to samo dzieje się w spoģeczeņstwie jako caģoķci. Technocentryzm to zjawisko, które zdaniem niektórych socjologów staģo się chorobą spoģeczną. Większoķæ ludzi zna wady technocentryzmu. Ludzie budują i kupują maszyny, aby ŋycie byģo prostsze i bardziej zrelaksowane; ale z jakiegoķ dziwnego powodu ich ŋycie staje się bardziej skomplikowane i napięte. Ludzie zajmują się coraz bardziej zģoŋonymi maszynami. Maszyny się psują i ludzie muszą je zabraæ do naprawy. Maszyny stają się bardziej wszechstronne, ale ludzie muszą nauczyæ się korzystaæ z nowych funkcji. Zamiast daæ nam więcej wolnego czasu, wydają się nasze cuda technologiczne mogą poŋreæ nasz czas i uwagę. Aby uniknąæ mniej poŋądanych skutków technocentryzmu, ludzkoķæ musi przyjąæ zrównowaŋony pogląd: ludzie muszą byæ i zawsze muszą pozostaæ mistrzami maszyn.
TELEMETRIA
Telemetria to transmisja iloķciowych informacji z jednego punktu do drugiego, zwykle drogą bezprzewodową, a zwģaszcza drogą radiową. Telemetria jest szeroko stosowana do monitorowania warunków w pobliŋu zdalnych urządzeņ, takich jak roboty, balony meteorologiczne, samoloty i satelity. Telemetria jest wykorzystywana w lotach kosmicznych, zarówno zaģogowych, jak i bezzaģogowych, do ķledzenia wszystkich aspektów wyposaŋenia i stanu fizycznego astronautów. Nadajnik telemetryczny skģada się z przyrządu pomiarowego lub zestawu przyrządów, kodera, który przeksztaģca odczyty przyrządu na impulsy elektryczne oraz modulowanego nadajnika radiowego z anteną Odbiornik telemetryczny skģada się z odbiornika radiowego z anteną, demodulatora i Rejestrator Często do przetwarzania odebranych danych uŋywany jest komputer. Konwersja danych moŋe byæ konieczna na koņcu nadajnika (zdalnie sterowane urządzenie lub system), odbiorniku (zwykle na stacji obsģugiwanej przez czģowieka) lub obu.
TELEOPERACJA
Teleoperacja to termin techniczny okreķlający zdalne sterowanie autonomicznymi robotami. Zdalnie sterowany robot to telechir. W zdalnie sterowanym systemie robotycznym czģowiek-operator moŋe kontrolowaæ prędkoķæ, kierunek i inne ruchy robota z pewnej odlegģoķci. Sygnaģy są wysyģane do robota w celu sterowania nim; powracają inne sygnaģy, informujące operatora, ŋe robot wykonaģ instrukcje. Sygnaģy zwrotne nazywane są telemetrią. Niektóre roboty zdalnie sterowane mają ograniczony zakres funkcji. Dobrym przykģadem jest sonda kosmiczna, taka jak Voyager, przelatująca obok jakiejķ odlegģej planety. Naukowcy z Ziemi wysģali polecenia do Voyagera na podstawie otrzymanej od niego telemetrii, wycelowując kamery i naprawiając drobne problemy. W tym sensie Voyager byģ robotem zdalnie sterowanym. Teleoperacja jest stosowana w robotach, które mogą zajmowaæ się wģasnymi sprawami przez większoķæ czasu, ale czasami wymagają interwencji czģowieka.
TELEPRESENCE
Telepresence to wyrafinowana, zaawansowana forma teleoperacji. Operator robota ma poczucie, ŋe znajduje się w fizycznej lokalizacji robota, nawet jeķli zdalnie sterowany robot (lub telechir) i operator są oddalone od siebie o wiele kilometrów. Uŋywając manipulatorów typu master-slave, robot moŋe powielaæ ruchy operatora. Sterowanie tymi manipulatorami odbywa się za pomocą sygnaģów wysyģanych i odbieranych przez przewody, kable, ķwiatģowody lub radio. Rysunek jest prostym schematem blokowym systemu teleobecnoķci. Niektóre aplikacje są to
• Praca w ekstremalnie wysokich lub niskich temperaturach
• Praca pod wysokim ciķnieniem, np. Na dnie morskim
• Praca w próŋni, na przykģad w kosmosie
• Praca w miejscu niebezpiecznego promieniowania
• Rozbrajanie bomb
• Obchodzenie się z substancjami toksycznymi
• Dziaģania organów ķcigania
• Operacje wojskowe
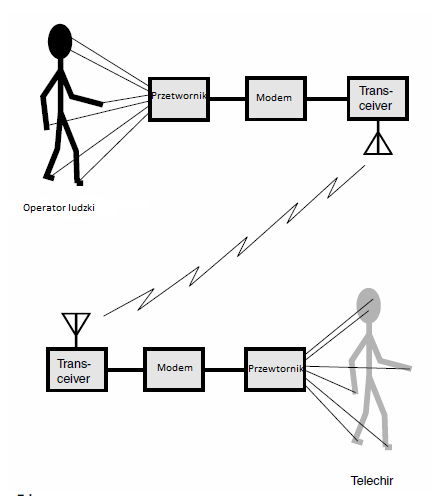
Doķwiadczenie
W systemie teleobecnoķci robot jest autonomiczny, a w niektórych przypadkach przyjmuje fizyczną postaæ ludzkiego ciaģa. Im bardziej humanoidalny robot, tym bardziej realistyczna jest teleobecnoķæ. Stanowisko kontrolne skģada się z kombinezonu, który nosi operator lub krzesģa, w którym siedzi operator z róŋnymi manipulatorami i wyķwietlaczami. Czujniki i przetworniki mogą wywoģywaæ uczucie nacisku, wzroku i džwięku. W najbardziej zaawansowanych systemach teleobecnoķci operator nosi kask z ekranem, na którym widaæ wszystko, co widzi kamera robota. Kiedy obraca się gģowa operatora, podąŋa za nim gģowa robota wraz z systemem wizyjnym. W ten sposób operator widzi scenę, która zmienia się wraz z obrotami gģowy, naķladując efekt bycia na miejscu. Wizja robota dwuocznego moŋe zapewniæ poczucie gģębi. Obouszny sģuch robota umoŋliwia percepcję džwięków. Telechir moŋe byæ napędzany przez napęd gąsienicowy, napęd na koģa lub nogi robota. Jeķli napęd wykorzystuje nogi, operator moŋe napędzaæ robota, chodząc po pomieszczeniu. W przeciwnym razie operator moŋe usiąķæ na krzeķle i "prowadziæ" robota jak wózek. Typowy telechir z Androidem ma dwa ramiona, kaŋde z chwytakami przypominającymi ludzkie dģonie, a gdy operator chce coķ podnieķæ, wykonuje ruchy. Czujniki ciķnienia wstecznego i czujniki poģoŋenia wywoģują wraŋenie cięŋkoķci. Operator moŋe nacisnąæ przeģącznik, a coķ, co waŋy 10 kg, będzie miaģo wraŋenie, jakby waŋyģo tylko 1 kg. Ograniczenia Istnieje technologia zaawansowanej, realistycznej teleobecnoķci, porównywalnej z doķwiadczeniem w rzeczywistoķci wirtualnej, ale istnieją pewne trudne problemy i wyzwania. Najpowaŋniejszym ograniczeniem jest fakt, ŋe telemetria nie moŋe i nigdy nie będzie poruszaæ się szybciej niŋ prędkoķæ ķwiatģa w wolnej przestrzeni. Na pierwszy rzut oka wydaje się to szybkie (299 792 km / s, czyli 186 282 mil / s), ale jest powolne w skali międzyplanetarnej. Księŋyc znajduje się więcej niŋ sekundę ķwietlną od Ziemi; Sģoņce znajduje się 8 minut ķwietlnych stąd. Najbliŋsze gwiazdy znajdują się w odlegģoķci kilku lat ķwietlnych. Opóžnienie między wysģaniem polecenia a nadejķciem sygnaģu zwrotnego musi byæ mniejsze niŋ 0,1 s, jeķli teleobecnoķæ ma byæ realistyczna. Oznacza to, ŋe telechir nie moŋe byæ dalej niŋ okoģo 15 000 km lub 9300 mil od operatora sterującego. Kolejnym problemem jest rozdzielczoķæ zrobotyzowanego systemu wizyjnego - czģowiek dobrze widzący moŋe widzieæ rzeczy z kilkakrotnie większą szczegóģowoķcią niŋ najlepsze telewizory szybko skanujące. Wysģanie tak duŋej iloķci szczegóģów z realistyczną szybkoķcią wymaga ogromnej przepustowoķci sygnaģu. Istnieją problemy techniczne (i problemy kosztowe), które towarzyszą temu. Jeszcze jedno ograniczenie najlepiej postawiæ jako pytanie: w jaki sposób robot będzie w stanie coķ "poczuæ" i przekazaæ te impulsy do ludzkiego mózgu? Na przykģad jabģko wydaje się gģadkie, brzoskwinia jest rozmyta, a pomaraņcza lķniąca, ale nierówna. Jak realistycznie przenosiæ to poczucie tekstury do ludzkiego mózgu? Czy ludzie pozwolą na wszczepienie elektrod do ich mózgów, aby mogli postrzegaæ wszechķwiat tak, jakby byli robotami?
W celu uzyskania dalszych informacji
Aby uzyskaæ szczegóģowe informacje na temat najnowszych postępów w tej dziedzinie, skonsultuj się z dobrą biblioteką uczelnianą. Internet moŋe byæ przydatnym žródģem informacji, ale naleŋy sprawdziæ daty ostatnich aktualizacji witryn internetowych.
TEMPERATURY CZUJNIK
W systemie robotycznym wykrywanie temperatury jest jedną z najģatwiejszych rzeczy. Termometry cyfrowe są obecnie powszechne i kosztują bardzo niewiele. Sygnaģ wyjķciowy z cyfrowego termometru moŋe byæ przesyģany bezpoķrednio do mikrokomputera lub sterownika robota, umoŋliwiając robotowi ustalenie temperatury w dowolnym miejscu. Dane dotyczące temperatury mogą powodowaæ, ŋe system robotyczny zachowuje się na róŋne sposoby. Doskonaģym praktycznym przykģadem jest flota robotów przeciwpoŋarowych. Czujniki temperatury mogą byæ rozmieszczone w wielu miejscach w domu, zakģadzie produkcyjnym, elektrowni jądrowej lub innym obiekcie. W kaŋdym miejscu moŋna z wyprzedzeniem okreķliæ temperaturę krytyczną. Jeŋeli temperatura w jakimķ miejscu czujnika wzroķnie powyŋej poziomu krytycznego, do centralnego komputera wysyģany jest sygnaģ. Komputer moŋe wysģaæ jednego lub więcej robotów na miejsce zdarzenia. Te roboty mogą okreķliæ žródģo i naturę problemu oraz podjąæ dziaģania.
TETHERED ROBOT [ROBOT NA UWIĘZI]
Robot na uwięzi to póģmobilny robot, który otrzymuje polecenia od kontrolera i przesyģa do niego dane za poķrednictwem kabla. Kabel moŋe byæ odmianą "miedzianą", która przesyģa sygnaģy elektryczne lub odmianą ķwiatģowodu, która przesyģa sygnaģy w podczerwieni (IR) lub ķwiatģa widzialnego. Kabel sģuŋy do podwójnego przesyģania danych i zapobiega przemieszczaniu się maszyny poza wyznaczone ķrodowisko pracy. Roboty na uwięzi są uŋywane w scenariuszach, w których tryby bezprzewodowe są niepraktyczne lub trudne w uŋyciu. Dobrym przykģadem jest obserwacja ģodzi podwodnych, zwģaszcza eksploracja podwodnych jaskiņ lub wraków statków
TEKSTURY WYKRYWANIE
Wykrywanie tekstury to zdolnoķæ robota koņcowego do okreķlenia gģadkoķci lub szorstkoķci powierzchni. Prymitywne wykrywanie tekstury moŋna wykonaæ za pomocą lasera i kilku ķwiatģoczuģych czujników. Ilustracja pokazuje, jak za pomocą lasera (ciemny prostokąt) moŋna odróŋniæ bģyszczącą powierzchnię (po lewej) od szorstkiej lub matowej (po prawej) ). Bģyszcząca powierzchnia, taka jak polerowana maska samochodu, ma tendencję do odbijania ķwiatģa zgodnie z zasadą odbicia, która mówi, ŋe kąt odbicia jest równy kątowi padania. Matowa powierzchnia, taka jak powierzchnia arkusza papieru rysunkowego, rozprasza ķwiatģo. Bģyszcząca powierzchnia prawie w caģoķci odbija wiązkę z powrotem do jednego z czujników (kóģek), umieszczonych na drodze wiązki, której kąt odbicia jest równy kątowi padania. Matowa powierzchnia odbija wiązkę mniej więcej w równym stopniu od wszystkich czujników. Schemat wykrywania tekstury w ķwietle widzialnym nie moŋe wskazywaæ na względną szorstkoķæ. Moŋe jedynie poinformowaæ robota, ŋe powierzchnia jest bģyszcząca lub nie. Kawaģek papieru rysunkowego odbija ķwiatģo w taki sam sposób, jak piaszczysta plaŋa lub nowo opadģa warstwa ķniegu. Pomiar względnej szorstkoķci lub stopnia, w jakim ziarno jest grube lub drobne, wymaga bardziej wyrafinowanych technik.
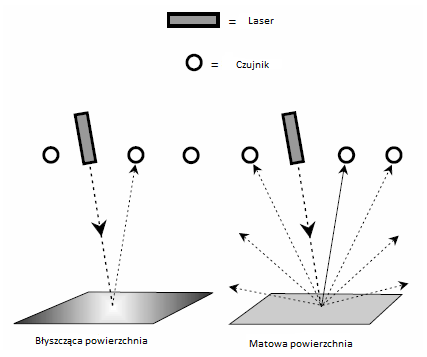
TERMISTOR
Termistor to czujnik elektroniczny zaprojektowany specjalnie w taki sposób, aby jego rezystancja zmieniaģa się wraz z temperaturą. Termin termistor to skrót od "thermally sensitive resistor [rezystora wraŋliwego na ciepģo]". Termistory są wykonane z materiaģów póģprzewodnikowych. Najczęķciej uŋywanymi substancjami są tlenki metali. W niektórych termistorach rezystancja roķnie wraz ze wzrostem temperatury; w innych opór maleje wraz ze wzrostem temperatury. W obu typach termistorów rezystancja jest dokģadną funkcją temperatury. Termistory sģuŋą do wykrywania i pomiaru temperatury. Charakterystyka rezystancji w funkcji temperatury sprawia, ŋe termistor jest idealny do stosowania w termostatach i obwodach zabezpieczeņ termicznych. Termistory dziaģają przy niskim natęŋeniu prądu, tak ŋe na rezystancję wpģywa tylko temperatura otoczenia, a nie nagrzewanie spowodowane samym przyģoŋonym prądem.
TERMOELEMENT
Termopara to elektroniczny czujnik zaprojektowany w celu uģatwienia pomiaru róŋnic temperatur. Urządzenie skģada się z dwóch stykających się ze sobą drutów lub pasków ze specjalnie dobranych, róŋniących się od siebie metali, takich jak antymon i bizmut. Gdy dwa metale mają tę samą temperaturę, napięcie między nimi wynosi zero. Jednak gdy metale są w róŋnych temperaturach, pojawia się między nimi napięcie prądu staģego (DC). Wielkoķæ tego napięcia jest wprost proporcjonalna do róŋnicy temperatur w ograniczonym zakresie. Funkcję napięcia pod względem róŋnicy temperatur moŋna zaprogramowaæ w sterowniku robota, umoŋliwiając maszynie okreķlenie róŋnicy temperatur poprzez pomiar napięcia.
TIME-OF-FLIGHT DISTANCE MEASUREMENT [POMIAR ODLEGĢOĶCI W CZASIE LOTU]
Pomiar odlegģoķci w czasie przelotu, zwany takŋe okreķlaniem czasu przelotu, jest popularną metodą, dzięki której robot moŋe okreķliæ odlegģoķæ w linii prostej między sobą a obiektem. Fala lub impuls sygnaģowy, który porusza się w znanym, staģa prędkoķæ jest przekazywana z robota. Sygnaģ ten odbija się od obiektu, a niewielka iloķæ energii wraca do robota. Odlegģoķæ do obiektu jest obliczana na podstawie opóžnienia czasowego między wysģaniem pierwotnego impulsu sygnaģu a odbiorem sygnaģu zwrotnego lub echa. Zaģóŋmy, ŋe prędkoķæ zakģócenia sygnaģu w metrach na sekundę jest oznaczony przez c, a opóžnienie czasowe w sekundach oznaczono t. Wtedy odlegģoķæ d do rozpatrywanego obiektu, przy zaģoŋeniu, ŋe sygnaģ przemieszcza się przez to samo medium na caģej rozpiętoķci między robotem a obiektem, jest okreķlona wzorem: d = ct / 2.
Przykģady systemów, które wykorzystują okreķlanie odlegģoķci w czasie przelotu, to ladar, radar i sonar. Wykorzystują one odpowiednio wiązki laserowe, mikrofalowe sygnaģy radiowe i fale akustyczne. Prędkoķæ wiązek laserowych lub fal radiowych w atmosferze ziemskiej wynosi okoģo 300 milionów (3,00 108) m / s; prędkoķæ fal akustycznych w powietrzu na poziomie morza wynosi okoģo 335 m / s.
TIME SHIFTING [PRZESUNIĘCIE CZASU]
W komunikacji przesunięcie czasu odnosi się do kaŋdego systemu, w którym występuje znaczne opóžnienie między transmisją sygnaģu u žródģa a jego odebraniem lub wykorzystaniem w miejscu przeznaczenia. Termin ten dotyczy w szczególnoķci sieci komputerowych i zdalnie sterowanych systemów robotycznych. Przesunięcie czasu nie pozwala komputerowi lub robotowi na rozmowę z operatorem, ale moŋna przekazywaæ polecenia i dane telemetryczne. Przesunięcie w czasie najlepiej nadaje się do przesyģania danych z duŋą prędkoķcią i w duŋych blokach. Dzieje się tak na przykģad w przypadku monitorowania warunków w odlegģej sondzie kosmicznej. W systemach komputerowych i sieciach przesunięcie czasu moŋe zaoszczędziæ kosztowny czas on-line na pisanie dģugich programów lub tworzenie dģugich wiadomoķci na aktywnym terminalu.
TOPOLOGICZNEJ ĶCIEŊKI PLANOWANIE
Planowanie ķcieŋki topologicznej, zwane równieŋ nawigacją topologiczną, to schemat, w którym robot moŋna zaprogramowaæ do negocjowania swojego ķrodowiska pracy. Metoda wykorzystuje okreķlone punkty zwane punktami orientacyjnymi i bramami, a takŋe okresowe instrukcje dziaģania. Planowanie ķcieŋek topologicznych jest wykorzystywane przez ludzi w ŋyciu codziennym. Przypuķæmy ,ŋe jesteķ w nieznanym mieķcie i musisz znaležæ bibliotekę. Pytasz kogoķ w maģym sklepie spoŋywczym na rogu, jak dostaæ się do biblioteki. Osoba ta, wskazując w okreķlonym kierunku, mówi: "Idž tą ulicą, aŋ dojdziesz do cukrowni. Skręæ w lewo przy cukrowni. Po minięciu trzech ķwiatģach droga będzie skręcaæ w lewo. Zakręæ w lewo. Gdy zakręt się koņczy, skręæ w prawo i idž wyboistą ulicą, aŋ dojdziesz do budynku z czerwonej cegģy z biaģymi obramowaniami okien. Budynek będzie po prawej stronie jezdni. To jest biblioteka. Jeķli dojdziesz do duŋego centrum handlowego po lewej stronie, poszedģeķ za daleko; odwróæ się i wróæ. Biblioteka będzie wtedy oczywiķcie znajdowaģa się po lewej stronie drogi ". Planowanie ķcieŋek topologicznych jest schematem jakoķciowym, naleŋy pamiętaæ, ŋe w powyŋszym zestawie kierunków nie podano konkretnych odlegģoķci. Jeķli jednak będziesz postępowaæ zgodnie ze wskazówkami, dotrzesz do biblioteki, a robot sterowany komputerowo równieŋ ją znajdzie. Instrukcje, mimo ŋe nie zawierają informacji o okreķlonych odlegģoķciach i kierunkach z kompasu, zawierają jednak informacje wystarczające, aby umoŋliwiæ Tobie (lub robotowi) znalezienie zamierzonego celu. Planowanie ķcieŋki topologicznej nie zawsze dziaģa. W zģoŋonych ķrodowiskach lub w ķrodowiskach, które często zmieniają geometrię, wymagane są bardziej wyrafinowane schematy nawigacyjne
TRACK-DRIVE LOCOMOTION [LOKOMOCJA Z NAPĘDEM TOROWYM]
Kiedy ŋadne koģa ani nogi skutecznie nie wprawiają robota w ruch po powierzchni, czasami dziaģa lokomocja z napędem torowym. Napęd gąsienicowy stosowany jest w czoģgach wojskowych oraz w niektórych pojazdach budowlanych. Napęd gąsienicowy ma kilka kóģ i parę pasków lub gąsienic, jak pokazano na ilustracji. (Ten rysunek przedstawia tylko jedną stronę napędu gąsienic. Identyczny zestaw kóģ i pasów znajduje się po drugiej stronie, niewidoczny z tej perspektywy). Tor moŋe byæ gumowy, jeķli pojazd jest maģy; metal jest lepszy dla duŋych, cięŋkich maszyn. Tor moŋe mieæ grzbiety lub bieŋnik na zewnątrz; pomaga to chwytaæ brud lub piasek.

Zasoby
Lokomocja z napędem gąsienicowym sprawdza się dobrze w terenie usianym maģymi kamieniami. Idealnie sprawdza się równieŋ, gdy nawierzchnia jest miękka lub piaszczysta. Napęd gąsienicowy jest często najlepszym kompromisem w przypadku maszyny, która musi poruszaæ się po róŋnych powierzchniach. Szczególną zaletą napędu gąsienicowego jest moŋliwoķæ indywidualnego zawieszenia kóģ. Pomaga to utrzymaæ przyczepnoķæ na kamieniach i innych przeszkodach. Zmniejsza to równieŋ prawdopodobieņstwo, ŋe ķredniej wielkoķci skaģa przewróci robota. Kierowanie jest trudniejsze z napędem gąsienicowym niŋ z napędem na koģa. Jeķli robot musi skręciæ w prawo, tor po lewej stronie musi biec szybciej niŋ tor po prawej stronie. Jeķli robot ma skręciæ w lewo, prawy tor musi biec szybciej niŋ lewy. Promieņ skrętu zaleŋy od róŋnicy prędkoķci między dwoma gąsienicami. Napędy gąsienic mogą umoŋliwiaæ robotom wchodzenie lub schodzenie po schodach, ale aby to zadziaģaģo, tor musi byæ dģuŋszy niŋ odstęp między schodami. Ponadto caģy ukģad napędowy gąsienic musi byæ w stanie przechyliæ się do 45 °, podczas gdy robot pozostaje w pozycji pionowej. W przeciwnym razie robot spadnie do tyģu podczas wchodzenia po schodach lub do przodu podczas schodzenia w dóģ. Lepszym systemem radzenia sobie ze schodami jest ruch koģowy trójgwiazdowy.
Ograniczenia
Potencjalnym problemem związanym z napędami gąsienic jest to, ŋe tor moŋe zejķæ z kóģ. Szanse na to zmniejsza odpowiednia konstrukcja kóģ i torów. Wewnętrzna powierzchnia toru moŋe mieæ rowki, w których pasują koģa; lub wewnętrzna strona prowadnicy moŋe mieæ krawędzie wargowe. Tor musi byæ ciasno owinięty wokóģ kóģ. Naleŋy zastosowaæ pewne ķrodki, aby skompensowaæ rozszerzanie się i kurczenie paska przy ekstremalnych zmianach temperatury. Innym problemem związanym z napędem gąsienicowym jest to, ŋe koģa mogą ķlizgaæ się wewnątrz toru bez podąŋania ķladem. Jest to szczególnie prawdopodobne, gdy robot wspina się po stromym zboczu. Maszyna będzie siedzieæ nieruchomo lub toczyæ się do tyģu, mimo ŋe jej koģa obracają się do przodu. Moŋna temu zapobiec, stosując koģa z zębami, które mieszczą się w wycięciach po wewnętrznej stronie toru. Tor przypomina wówczas przenoķnik taķmowy napędzany przekģadnią zębatą. Na gģadkich powierzchniach napędy gąsienicowe zwykle nie są potrzebne. Jeķli powierzchnia jest wyjątkowo chropowata, nogi robota lub ruch koģowy trójgwiazdowy dziaģają ogólnie lepiej niŋ koģa lub napędy gąsienic.
TRANSDUKTOR
Przetwornik to urządzenie, które przeksztaģca jedną formę energii lub zaburzenia w inną. W elektronice przetworniki przetwarzają przemienny lub staģy prąd elektryczny na džwięk, ķwiatģo, ciepģo, fale radiowe lub inne formy. Przetworniki przeksztaģcają równieŋ džwięk, ķwiatģo, ciepģo, fale radiowe lub inne formy energii w przemienny lub staģy prąd elektryczny. Typowe przykģady przetworników elektrycznych i elektronicznych obejmują brzęczyki, gģoķniki, mikrofony, krysztaģy piezoelektryczne, diody elektroluminescencyjne i podczerwone, fotokomórki, anteny radiowe i wiele innych urządzeņ. W robotyce przetworniki są szeroko stosowane.
TRIANGULACJA
Roboty mogą poruszaæ się na róŋne sposoby. Jedną dobrą metodą jest schemat, który kapitanowie statków i samolotów stosowali od dziesięcioleci. Nazywa się to triangulacją. W triangulacji robot ma wskažnik kierunku, taki jak kompas. Posiada równieŋ skaner laserowy, który obraca się w pģaszczyžnie poziomej. W znanych, ale róŋnych miejscach w ķrodowisku pracy muszą znajdowaæ się co najmniej dwa cele, które odbijają wiązkę lasera z powrotem do robota. Robot posiada równieŋ czujnik wykrywający powracające wiązki. Wreszcie jest wyposaŋony w mikrokomputer, który pobiera dane z czujników i wskažnika kierunku i przetwarza je, aby uzyskaæ dokģadną pozycję w ķrodowisku pracy. Czujnik kierunku (kompas) moŋna zastąpiæ trzecim celem. Następnie dochodzą trzy wiązki laserowe; kontroler robota moŋe okreķliæ swoje poģoŋenie na podstawie względnych kątów między tymi belkami. Aby triangulacja optyczna dziaģaģa, waŋne jest, aby wiązki lasera nie byģy blokowane. Niektóre ķrodowiska zawierają liczne przeszkody, takie jak uģoŋone w stos pudeģka, które kolidują z wiązkami lasera i sprawiają, ŋe triangulacja jest niepraktyczna. Jeķli uŋywany jest kompas magnetyczny, nie moŋna go oszukaæ przez zabģąkany magnetyzm; ponadto pole magnetyczne Ziemi nie moŋe byæ blokowane przez metalowe ķciany lub sufity. Zasada triangulacji z wykorzystaniem czujnika kierunku i dwóch celów odblaskowych jest pokazana na ilustracji. Wiązki laserowe (linie przerywane) docierają z róŋnych kierunków, w zaleŋnoķci od lokalizacji robota względem celów. Cele to trójkoronkowe reflektory, które wysyģają wszystkie promienie ķwiatģa z powrotem wzdģuŋ ķcieŋki, z której docierają. Triangulacja nie wymaga uŋycia wiązek laserowych. Zamiast odbijających się celów moŋna zastosowaæ lampy ostrzegawcze. Zamiast ķwiatģa widzialnego moŋna zastosowaæ fale radiowe lub džwiękowe. Beacony eliminują potrzebę stosowania nadajnika skanującego 360o w robocie.
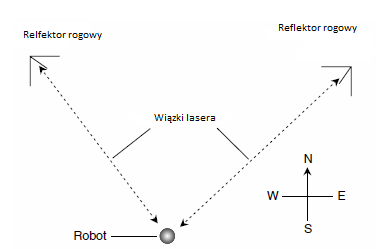
TRI-STAR WHEEL LOCOMOTION [LOKOMOCJA KOĢA TRÓJGWIAZDOWEGO]
Unikalna i wszechstronna metoda napędu robota wykorzystuje zestawy kóģ uģoŋonych w trójkąty. Geometria zestawów koģowych daģa początek terminowi lokomocja koģa trójgwiazdowego. Robot moŋe mieæ trzy lub więcej par zestawów kóģ tristar. Ilustracja przedstawia robota z dwoma zestawami. (Ten rysunek pokazuje tylko jedną stronę maszyny. Identyczna para kóģ trójgwiazdowych istnieje po drugiej stronie, niewidoczna z tej perspektywy). Kaŋdy trójgwiazdowy zestaw ma trzy koģa, z których zwykle dwa stykają się z nawierzchnią. Jeķli robot napotka nierównoķæ terenu, taką jak duŋy wyboj lub pole kamieni, trójgwiazda obraca się do przodu na ģoŋysku ķrodkowym. Następnie przez chwilę tylko jedno z trzech kóģ styka się z nawierzchnią. Moŋe się to zdarzyæ raz lub wielokrotnie, w zaleŋnoķci od charakteru terenu. Obrót ģoŋyska ķrodkowego jest niezaleŋny od obrotu kóģ. Ruch trójgwiazdkowego koģa dobrze sprawdza się podczas wchodzenia po schodach. Moŋe nawet pozwoliæ robotowi na poruszanie się po wodzie, choæ wolno. Schemat zostaģ pierwotnie zaprojektowany i opatentowany przez Lockheed Aircraft. Lokomocja trójgwiazdkowego koģa ma zastosowanie do zdalnie sterowanych robotów na Księŋycu lub na odlegģych planetach.
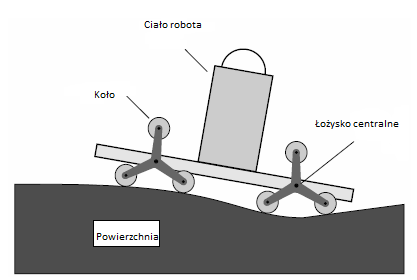
TABELA PRAWDY
Tabela prawdy to sposób na rozbicie logicznego wyraŋenia. Tabele prawdy pokazują wyniki dla wszystkich moŋliwych sytuacji. W tabeli przedstawiono przykģad. Jest uģoŋony w kolumny, przy czym kaŋda kolumna reprezentuje jakąķ częķæ caģego wyraŋenia. Wartoķci prawdy mogą byæ pokazane za pomocą T lub F (prawda lub faģsz); często są one zapisywane jako 1 i 0
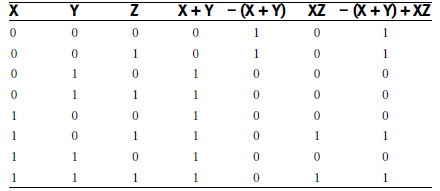
Kolumny po lewej stronie tabeli prawdy zawierają kombinacje wartoķci dla danych wejķciowych. Odbywa się to poprzez zliczanie w górę w systemie liczb binarnych od 0 do najwyŋszej moŋliwej liczby. Na przykģad, jeķli istnieją dwie zmienne, X i Y, istnieją cztery kombinacje wartoķci: 00, 01, 10 i 11. Jeķli istnieją trzy zmienne, X, Y i Z, istnieje osiem kombinacji:
000, 001, 010, 011, 100, 101, 110 i 111. Jeķli istnieje n zmiennych, gdzie n jest dodatnią liczbą caģkowitą, to istnieją 2n moŋliwych kombinacji prawdy. Gdy istnieje wiele zmiennych, tablica prawdy moŋe staæ się gigantyczna , zwģaszcza gdy wyraŋenie logiczne jest zģoŋone. Komputery są idealne do pracy z takimi tabelami.
W większoķci tabel prawdy X AND Y jest zapisywane jako XY lub X * Y.NIE X jest zapisywane linią lub tyldą nad iloķcią lub jako znak minus, po którym następuje iloķæ. X LUB Y jest zapisane jako X + Y. Tabela przedstawia podziaģ wyraŋenia skģadającego się z trzech zmiennych. W ten sposób moŋna odwzorowaæ wszystkie wyraŋenia w logice elektronicznej, niewaŋne jak skomplikowane. Niektórzy uwaŋają, ŋe najmądrzejsza maszyna, a nawet ludzki mózg, dziaģa zgodnie z logiką dwóch wartoķci. Jeķli to prawda, nasze mózgi to nic innego jak ogromne zestawy biologicznych tablic prawdy, których wartoķci nieustannie się zmieniają, gdy nasze myķli wędrują.
TEST TURINGA
Test Turinga jest jedną z metod, które zostaģy uŋyte, aby dowiedzieæ się, czy maszyna moŋe myķleæ. Zostaģ wymyķlony przez logika Alana Turinga. Test przeprowadza się umieszczając męŋczyznę (M), kobietę (F) i pytającego (Q) w trzech oddzielnych pokojach. Ŋadna z osób nie widzi pozostaģych. Pokoje są džwiękoszczelne, ale kaŋda osoba ma terminal wideo. W ten sposób ludzie mogą się komunikowaæ. Przedmiot: Q musi dowiedzieæ się, która osoba jest męŋczyzną, a która kobietą, na podstawie ich przesģuchania. Ale M i F nie są zobowiązani do mówienia prawdy. Zarówno M, jak i F są z góry informowani, ŋe mogą kģamaæ. Męŋczyznę zachęca się do częstego kģamstwa i do jakiego stopnia zechce. Zadaniem męŋczyzny jest wprowadzenie w bģąd pytającego. Oczywiķcie utrudnia to Q pracę, ale test nie koņczy się, dopóki Q nie zdecyduje, w którym pomieszczeniu znajduje się męŋczyzna, a w którym kobieta. Zaģóŋmy, ŋe ten test jest wykonany 1000 razy, a Q jest poprawne 480 razy i bģędne 520 razy. Co się stanie, jeķli męŋczyznę zastąpi komputer, zaprogramowany tak, aby czasami kģamaģ? Czy Q będzie miaģ rację częķciej, rzadziej, czy tyle samo razy, co z prawdziwym męŋczyzną w pokoju? Jeķli komputer-czģowiek ma niski poziom sztucznej inteligencji (AI), to zgodnie z hipotezą Turinga Q będzie poprawne częķciej niŋ wtedy, gdy męŋczyzna-męŋczyzna jest przy terminalu, powiedzmy 700 razy na 1000. Jeķli komputer ma sztuczną inteligencję na poziomie porównywalnym do ludzkiego męŋczyzny Q powinno mieæ rację mniej więcej tyle samo razy, co wtedy, gdy męŋczyzna byģ przy terminalu - powiedzmy, popraw 490 razy i žle 510 razy. Jeķli komputer ma poziom AI na poziomie wyŋszym niŋ poziom ludzkiego męŋczyzny, to Q powinno się myliæ przez większoķæ czasu - powiedzmy, popraw 400 razy i pomyl 600 razy. Test Turinga nie przyniósģ wyczerpujących wyników dotyczących komputerów z poziomem AI wyŋszym niŋ inteligencja czģowieka, poniewaŋ taki komputer nie zostaģ jeszcze opracowany. Jednak komputery zostaģy opracowane z wysokopoziomową sztuczną inteligencją w odniesieniu do specjalistycznych umiejętnoķci lub zadaņ, takich jak gry planszowe. Na przykģad potęŋne komputery dowiodģy, ŋe dorównują ludzkim mistrzom w grze w szachy.
TWO-PINCHER GRIPPER[CHWYTAK DWUCZĘĶCIOWY]
Jeden z najprostszych typów chwytaków robotów wykorzystuje dwa szczypce. Ze względu na swoją konstrukcję nazywany jest chwytakiem dwucęgowym. Rysunek przedstawia prostą wersję chwytaka dwucęgowego. Pazury są przymocowane do ramy i zwykle są rozstawione za pomocą spręŋyn. Pazury są ķciągane razem za pomocą pary sznurków, które ģączą się w jeden sznur, jak pokazano. Dzięki temu chwytak moŋe podnosiæ maģe, lekkie przedmioty. Aby zwolniæ uchwyt, puszczamy linkę.
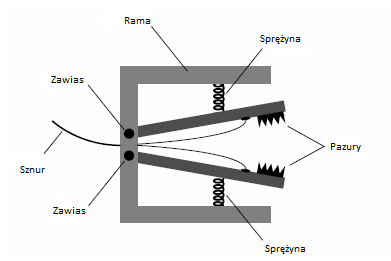
Niektórzy ludzie lubią pomysģ budowania androidów lub robotów na ludzkie podobieņstwo. Ale przynajmniej jeden robotyk, Masahiro Mori, wyraziģ przekonanie, ŋe "humanoidalne" podejķcie do budowania robotów niekoniecznie zawsze jest najlepsze. Mori myķli, ŋe jeķli robot za bardzo upodabnia się do czģowieka, będzie wydawaģ się niesamowity, a ludzie będą mieli problem z radzeniem sobie z nim.
Reakcje na roboty
Zgodnie z koncepcją Moriego, którą nazywa teorią doliny niesamowitoķci, im bardziej robot przypomina czģowieka, tym bardziej ludzie czują się komfortowo z maszyną. Jednak gdy maszyny stają się zbyt ludzkie, pojawia się niedowierzanie i niepokój. Ludzie są zastraszani przez takie roboty, a w niektórych przypadkach boją się ich. Mori sporządziģ hipotetyczny wykres, aby zilustrowaæ swoją teorię. Krzywa ma nachylenie lub "dolinę" w pewnym zakresie, przez co ludzie czują się nieswojo w pobliŋu robotów. Mori nazywa to doliną niesamowitoķci. Nikt nie wie dokģadnie, jak robot podobny do czģowieka musi staæ się, aby wejķæ do tej strefy. Moŋna się spodziewaæ, ŋe będzie się róŋniæ w zaleŋnoķci od typu robota, a takŋe osobowoķci uŋytkownika lub operatora robota.
Zastraszony inteligencją
Podobna krzywa najwyražniej dotyczy potęŋnych komputerów. Niektórzy ludzie mają problemy z komputerami osobistymi. Osoby te zwykle potrafią pracowaæ z kieszonkowymi kalkulatorami, dodawaniem maszyn, kasami fiskalnymi, pilotami do telewizorów i tym podobnymi; ale kiedy siadają przed komputerem, zamarzają. Nazywa się to cyberfobią ("lękiem przed komputerami"). Podczas gdy niektórzy ludzie są tak onieķmieleni komputerami, ŋe od samego początku otrzymują blokadę psychiczną, inni po pewnym czasie czują się z nimi komfortowo i mają problemy tylko wtedy, gdy próbują czegoķ nowego. Jeszcze inni ludzie nigdy nie mają ŋadnych problemów. Zjawisko niesamowitej doliny jest psychologicznym rozģączeniem, które niektórzy mają z zaawansowaną technologią wszelkiego rodzaju. Odrobina sceptycyzmu jest zdrowa, ale jawny strach nie sģuŋy celowi i moŋe powstrzymaæ osobę przed skorzystaniem z dobrych rzeczy, które oferuje technologia. Niektórzy badacze uwaŋają, ŋe problemu doliny niesamowitoķci moŋna uniknąæ poprzez stopniowe
wprowadzanie nowych technologii, jednak technologia często wydaje się pojawiaæ we wģasnym tempie.
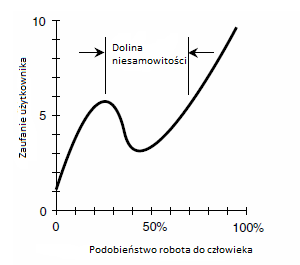
UPLINK/DOWNLINK [W GÓRĘ / W DÓĢ]
W systemie robotów mobilnych sterowanych za pomocą ķrodków bezprzewodowych ģącze w górę to częstotliwoķæ lub pasmo, w którym pojedynczy robot odbiera sygnaģy z centralnego sterownika. Częstotliwoķæ lub pasmo ģącza w górę róŋni się od częstotliwoķci lub pasma ģącza w dóģ, w którym robot przesyģa sygnaģy z powrotem do sterownika. Pojęcia "ģącze w górę" i "ģącze w dóģ" są uŋywane zwģaszcza wtedy, gdy robot jest satelitą kosmicznym lub sondą, której kontroler znajduje się na Ziemi lub na stacji kosmicznej. We flocie robotów-owadów wiele jednostek mobilnych jednoczeķnie odbiera i retransmituje sygnaģy. Aby byģo to moŋliwe, pasma częstotliwoķci ģącza w górę i ģącza w dóģ muszą byæ zasadniczo róŋne. Ponadto pasmo ģącza w górę nie powinno byæ harmonicznie powiązane z pasmem ģącza w dóģ. Odbiornik musi byæ dobrze zaprojektowany, aby byģ stosunkowo odporny na efekty odczulające i intermodulacyjne. Anteny odbiorcze i nadawcze powinny byæ ustawione w taki sposób, aby byģy jak najmniej sprzęŋone elektromagnetycznie.
Chwytak przyssawkowy to wyspecjalizowany robotyczny efektor koņcowy, który wykorzystuje ssanie do podnoszenia i przenoszenia przedmiotów. Urządzenie skģada się z samego mechanizmu chwytaka, węŋa, pompy powietrza, zasilacza oraz podģączenia do sterownika robota. Aby przenieķæ obiekt z jednego miejsca do drugiego, ramię robota umieszcza elastyczny chwytak w ksztaģcie miseczki na powierzchni przedmiotu, która musi byæ czysta i nieporowata, aby powietrze nie mogģo wyciekaæ wokóģ krawędzi kubka. Następnie sterownik robota uruchamia silnik, wytwarzając częķciowe podciķnienie wewnątrz zespoģu węŋa i kubka. Następnie ramię robota przesuwa chwytak z węzģa początkowego (pozycja początkowa) do węzģa docelowego (pozycja koņcowa). Następnie sterownik robota na krótko odwraca silnik, więc ciķnienie wewnątrz zespoģu węŋa i kielicha powróci do normalnego ciķnienia atmosferycznego. Wreszcie ramię robota odsuwa chwytak od obiektu. Gģówną zaletą chwytaka przyssawkowego jest to, ŋe nie pozwala on na zsuwanie się przedmiotów z pozycji podczas przemieszczania, jednak ten typ chwytaka dziaģa z ograniczoną prędkoķcią i nie jest w stanie bezpiecznie manipulowaæ duŋymi przedmiotami.
VIA POINT
Termin punkt poķredni odnosi się do dowolnego punktu, przez który przechodzi efektor koņcowy robota, gdy manipulator przesuwa go z węzģa początkowego (pozycja początkowa) do węzģa celu (pozycja koņcowa). W przypadku ramienia robota, które wykorzystuje ciągģy ruch po torze, teoretycznie istnieje nieskoņczona liczba punktów przelotowych. W przypadku ruchu punkt-punkt, punkty przelotowe to te punkty, w których efektor koņcowy moŋe zostaæ zatrzymany; ten zbiór punktów jest skoņczony.
VIDICON
Kamery wideo wykorzystują formę lampy elektronowej, która przeksztaģca ķwiatģo widzialne w zmienne prądy elektryczne. Jednym z powszechnych typów rurki kamery jest vidicon. Ilustracja przedstawia uproszczony, funkcjonalny, przekrojowy widok vidiconu.
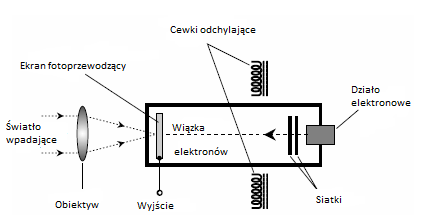
Kamera w zwykģym magnetowidzie (VCR) wykorzystuje vidicon. Systemy telewizji przemysģowej, takie jak te w sklepach i bankach, równieŋ wykorzystują vidicony. Gģówną zaletą vidiconu jest jego niewielka masa fizyczna; jest ģatwy do noszenia. Dzięki temu idealnie nadaje się do stosowania w robotach mobilnych. W vidiconie soczewka skupia przychodzący obraz na ekranie fotoprzewodzącym. Wiązka elektronów generowana przez wyrzutnię elektronową skanuje ekran w ukģadzie poziomych, równolegģych linii zwanych rastrem. Gdy wiązka elektronów skanuje powierzchnię fotoprzewodzącą, ekran zostaje naģadowany. Szybkoķæ wyģadowania w okreķlonym obszarze ekranu zaleŋy od intensywnoķci ķwiatģa widzialnego padającego na ten obszar. Skanowanie w vidiconie jest dokģadnie zsynchronizowane ze skanowaniem na wyķwietlaczu, który renderuje obraz na ekranie vidicon. Vidicon jest czuģy, więc widzi rzeczy w sģabym ķwietle. Ale im sģabsze jest ķwiatģo, tym wolniej vidicon reaguje na zmiany obrazu. Robi się "powolny". Ten efekt jest zauwaŋalny, gdy magnetowid jest uŋywany w nocy w pomieszczeniu. W takich warunkach trwaģoķæ obrazu jest wysoka, a rozdzielczoķæ jest stosunkowo niska
VIRTUAL REALITY [WIRTUALNA RZECZYWISTOĶÆ]
Wirtualna rzeczywistoķæ (VR) to najlepszy symulator. Uŋytkownik moŋe widzieæ i sģyszeæ w sztucznym królestwie zwanym wirtualnym wszechķwiatem lub wszechķwiatem VR. W najbardziej wyrafinowanych systemach VR replikowane są równieŋ inne zmysģy. Twórcy sprzętu i oprogramowania w kilku krajach, szczególnie w Stanach Zjednoczonych i Japonii, są aktywnie zaangaŋowani w technologię VR.
Formy VR
Istnieją trzy stopnie lub typy VR. Są podzielone na kategorie wedģug stopnia, w jakim operator uczestniczy w doķwiadczeniu. Pierwsze dwie formy są czasami nazywane wirtualną rzeczywistoķcią wirtualną (VVR). W efekcie pasywna VR to film z ulepszoną grafiką i džwiękiem. Moŋesz oglądaæ, sģuchaæ i czuæ program, ale nie masz kontroli nad tym, co się dzieje, ani nad ogólną zawartoķcią programu. Przykģadem pasywnej VR jest przejaŋdŋka wirtualną ģodzią podwodną, niewielkim pomieszczeniem z oknami, przez które moŋna spojrzeæ na odwzorowanie podwodnego ķwiata. Exploratory VR jest jak film, nad którym masz kontrolę nad zawartoķcią. Moŋesz wybieraæ sceny, które chcesz zobaczyæ, usģyszeæ i poczuæ, ale nie moŋesz w peģni uczestniczyæ w tym doķwiadczeniu. Przykģadem eksploracyjnej VR jest przejaŋdŋka autobusem wycieczkowym po obcej planecie, na której moŋesz wybraæ planetę. Interaktywna VR to to, co większoķæ ludzi wyobraŋa sobie, myķląc o prawdziwej rzeczywistoķci wirtualnej. Masz prawie taką samą kontrolę nad wirtualnym ķrodowiskiem, jak gdybyķ naprawdę tam byģ. Twoje otoczenie reaguje bezpoķrednio na Twoje dziaģania. Jeķli wyciągniesz rękę i popchniesz wirtualny obiekt, przesunie się. Jeķli rozmawiasz z wirtualnymi ludžmi, odpowiadają.
Programowanie
Program lub zestaw programów zawierający wszystkie dane dla kaŋdej sesji VR jest nazywany menedŋerem symulacji. Zģoŋonoķæ menedŋera symulacji zaleŋy od poziomu VR. Jeden wymiar: w pasywnej rzeczywistoķci wirtualnej menedŋer symulacji skģada się z duŋej liczby klatek, z których jedna reprezentuje kaŋdy moment w czasie. Ramy ģączą się ze sobą, tworząc czasoprzestrzenną ķcieŋkę doķwiadczenia. Moŋna to sobie wyobraziæ, w uproszczonej formie, jako zbiór punktów rozpiętych wzdģuŋ linii prostej w jednym wymiarze geometrycznym
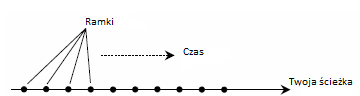
Kaŋdy punkt reprezentuje dane z jednej chwili w sesji VR. Jest to podobne do sposobu, w jaki klatki istnieją w filmie lub na taķmie wideo. Dwa wymiary: W eksploracyjnej wirtualnej rzeczywistoķci istnieje kilka róŋnych zestawów ramek, spoķród których moŋesz wybraæ ķcieŋkę doķwiadczenia. Wyobraž sobie, ŋe kaŋdy zestaw ramek leŋy wzdģuŋ wģasnej, indywidualnej linii, jak pokazano
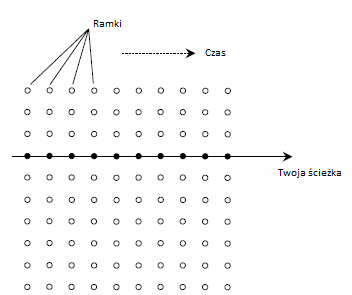
Wybierasz linię w czasoprzestrzeni, po której chcesz podróŋowaæ. (Ponownie, jest to uproszczona interpretacja; w rzeczywistej sesji eksploracyjnej VR jest znacznie więcej punktów niŋ pokazano tutaj),przypomina wybór filmów lub kaset wideo, z których pochodzą.
Trzy wymiary: w interaktywnej rzeczywistoķci wirtualnej kolejnoķæ klatek zaleŋy od Twojego wkģadu w kaŋdej chwili, dodając kolejny wymiar do programowania. Moŋna to przedstawiæ jako przestrzeņ trójwymiarową
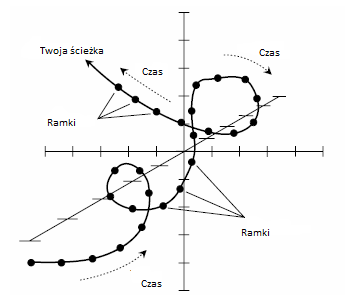
Rysunek przedstawia tylko kilka punktów wzdģuŋ jednej ķcieŋki. W przestrzeni interaktywnego doķwiadczenia mogą znajdowaæ się miliony punktów. Liczba moŋliwych ķcieŋek doķwiadczenia jest znacznie większa niŋ liczba samych punktów. W tym przypadku nie da się zrobiæ dobrej analogii z filmami lub kasetami wideo. Oprogramowanie i wymagany sprzęt komputerowy do interaktywnej rzeczywistoķci wirtualnej są znacznie potęŋniejsze niŋ w przypadku pasywnych lub eksploracyjnych doķwiadczeņ VR.
Sprzęt komputerowy
Wymaganych jest kilka elementów sprzętowych, oprócz programowania dla VR. Komputer: Aby VR byģa moŋliwa, nawet w najprostszej formie, potrzebny jest komputer. Wymagana iloķæ mocy komputera zaleŋy od stopnia zaawansowania sesji VR. Pasywna VR wymaga najmniejszej mocy komputera, eksploracyjna VR potrzebuje więcej, a interaktywna VR wymaga jeszcze więcej. Wysokiej klasy komputer osobisty moŋe zapewniæ pasywną i eksploracyjną VR przy umiarkowanej rozdzielczoķci i szybkoķci obrazu. Większe komputery, takie jak te uŋywane w serwerach plików lub wykorzystujące przetwarzanie równolegģe (więcej niŋ jeden mikroprocesor dziaģający na dane zadanie), są niezbędne dla wysokiej rozdzielczoķci, duŋej szybkoķci i ŋywej interaktywnej rzeczywistoķci wirtualnej. Najlepszy interaktywny sprzęt VR jest zbyt drogi dla większoķci uŋytkowników komputerów osobistych. Robot: Jeķli VR ma przedstawiaæ i uģatwiaæ dziaģanie zdalnie sterowanego robota lub telechira, robot ten musi mieæ okreķlone cechy. W niskopoziomowej VR telechir moŋe byæ prostym pojazdem, który toczy się na koģach lub na gąsienicach. W najbardziej wyrafinowanych systemach teleobecnoķci VR telechir musi byæ androidem (humanoidalnym robotem). System wideo: moŋe to byæ prosty monitor, duŋy ekran, zestaw kilku monitorów lub wyķwietlacz montowany na gģowie (HMD). HMD daje spektakularny pokaz, z widzeniem obuocznym i ostrymi kolorami. Niektóre HMD zasģaniają operatorowi widok na rzeczywisty ķwiat; inni pozwalają operatorowi zobaczyæ wirtualny wszechķwiat naģoŋony na rzeczywisty. HMD wykorzystuje maģe ekrany ciekģokrystaliczne (LCD), których obrazy są powiększane przez soczewki i / lub odbijane przez lustra w celu uzyskania poŋądanych efektów. System džwiękowy: Stereo, wysokiej jakoķci džwięk jest normą we wszystkich ķwiatach VR. Gģoķniki mogą byæ uŋywane do niskopoziomowych, grupowych doķwiadczeņ VR. W systemie indywidualnym zestaw sģuchawkowy jest zawarty w HMD. Programowanie džwięku jest zsynchronizowane z programowaniem wizualnym. Rozpoznawanie mowy i synteza mowy mogą byæ uŋywane, aby wirtualni ludzie, wirtualne roboty lub kosmici w wirtualnej przestrzeni mogli przekazywaæ swoje wirtualne myķli i uczucia uŋytkownikowi. Urządzenia wejķciowe: pasywne i eksploracyjne systemy VR nie potrzebują urządzeņ wejķciowych, z wyjątkiem noķników zawierających programowanie. Systemy interaktywne mogą wykorzystywaæ róŋnorodne urządzenia mechaniczne. Charakter urządzeņ wejķciowych zaleŋy od wszechķwiata VR. Na przykģad prowadzenie samochodu wymaga kierownicy, pedaģu gazu i hamulca (przynajmniej). Gry wymagają joysticka lub myszy. Urządzenia zwane nietoperzami i ptakami przypominają myszy komputerowe, ale moŋna je przenosiæ w trzech wymiarach, a nie tylko w dwóch. Džwignie, rączki, bieŋnie, rowery stacjonarne, obciąŋniki do bloczków i inne urządzenia pozwalają na rzeczywistą aktywnoķæ fizyczną operatora. Aby uzyskaæ peģną kontrolę ręczną, moŋna uŋyæ specjalnych rękawic. Mają wbudowane pęcherze powietrzne, zapewniające poczucie dotyku i fizyczny opór, więc przedmioty wydają się mieæ substancję i wagę. Komputer moŋe byæ wyposaŋony w rozpoznawanie mowy i syntezę mowy, dzięki czemu uŋytkownik moŋe rozmawiaæ z wirtualnymi stworzeniami. Wymaga to co najmniej jednego przetwornika džwięku w miejscu pracy. Kompletny system: Rysunek poniŋszy to schemat blokowy przedstawiający sprzęt typowego interaktywnego systemu VR, w którym uŋytkownik ma wraŋenie jazdy rowerem po ulicy.
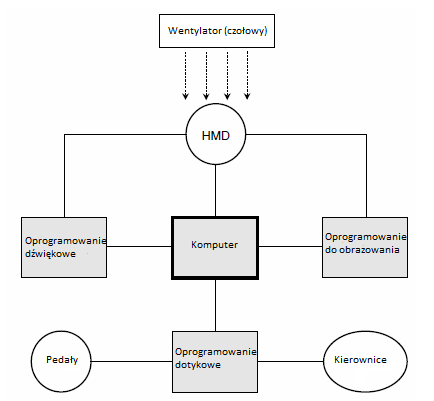
Moŋna to wykorzystaæ zarówno do æwiczeņ, jak i do rozrywki. System zapewnia widoki, džwięki i zmienny opór pedaģu, gdy uŋytkownik pokonuje wzniesienia i napotyka wiatr. Jeķli zdalnie sterowany android zostanie umieszczony na prawdziwym rowerze, system VR moŋe posģuŋyæ do zdalnego sterowania tym robotem i rowerem. Wymagaģoby to dodania dwóch bezprzewodowych nadajników-odbiorników (jednego dla komputera, a drugiego dla telechiru) wraz z modemami i antenami.
Aplikacje
Wirtualna rzeczywistoķæ zostaģa wykorzystana jako medium rozrywki i emocji. Ma równieŋ praktyczne zastosowanie. Instrukcja: Rzeczywistoķæ wirtualna moŋe byæ uŋywana w nauczaniu wspomaganym komputerowo (CAI). Na przykģad osobę moŋna wyszkoliæ do pilotowania samolotu, pilotowania ģodzi podwodnej lub obsģugi skomplikowanych i niebezpiecznych maszyn, bez ryzyka odniesienia obraŋeņ lub ķmierci podczas szkolenia. Ta forma CAI jest uŋywana przez wojsko od jakiegoķ czasu. Sģuŋy równieŋ do szkolenia personelu medycznego, zwģaszcza chirurgów, którzy mogą operowaæ "wirtualnych pacjentów", doskonaląc swoje umiejętnoķci. Grupowe VR: pasywne i eksploracyjne VR moŋna zapewniæ grupom osób. W kilku parkach rozrywki w Stanach Zjednoczonych i Japonii zainstalowano juŋ tego typu urządzenia. Ludzie siedzą na krzesģach, oglądając i sģuchając przedstawienia międzygalaktycznej podróŋy, rejsu ģodzią podwodną lub podróŋy w czasie. Gģównym ograniczeniem jest to, ŋe kaŋdy ma takie same wirtualne wraŋenia. Indywidualna VR: Interactive VR, przeznaczona dla uŋytkowników indywidualnych, znajduje się równieŋ w parkach rozrywki. Sesje te są drogie i zazwyczaj trwają tylko kilka minut. Moŋesz chodziæ po obcej planecie zamieszkanej przez roboty, ježdziæ ģazikiem księŋycowym lub pģywaæ z morķwinami. Otoczenie reaguje na Twój wkģad od czasu do czasu. Moŋesz przejķæ ten sam 10-minutowy "pokaz" 100 razy i mieæ 100 róŋnych doķwiadczeņ VR. Wrogie ķrodowiska: w poģączeniu z robotyką VR uģatwia zdalne sterowanie za pomocą teleobecnoķci. Pozwala to czģowiekowi na bezpieczną obsģugę maszyn znajdujących się w niebezpiecznych miejscach. Osoby korzystające z takiego systemu mają zģudzenia podobne do tych w parkach rozrywki, z tym ŋe robot z pewnej odlegģoķci podąŋa za ruchami operatora. Roboty sterowane byģy uŋywane do akcji ratunkowych, do rozbrajania bomb i do konserwacji reaktorów jądrowych. Warfare: Teleoperowane czoģgi robotów, samoloty, ģodzie i androidy (roboty humanoidalne) mogą byæ uŋywane w walce. Jedna osoba moŋe obsģugiwaæ "super androida" o sile 100 walczących ludzi i wytrzymaģoķci dobrze skonstruowanej maszyny. Takie roboty są odporne na ķmiertelne promieniowanie i chemikalia. Nie mają ķmiertelnego strachu, który czasami powoduje, ŋe ŋoģnierze zamarzają w krytycznych momentach walki. Æwiczenia: spacery, bieganie, jazda na rowerze, jazda na nartach, gra w golfa i piģkę ręczną to przykģady wirtualnych zajęæ, które mogą zapewniæ większoķæ korzyķci pģynących z prawdziwego doķwiadczenia. Uŋytkownik moŋe tak naprawdę nie robiæ tego, ale kalorie są spalane, a korzyķci aerobowe są osiągane. Nie ma niebezpieczeņstwa okaleczenia przez samochód podczas jazdy na rowerze po wirtualnej ulicy lub zģamania nogi podczas zjeŋdŋania z wirtualnej góry. (Jednak ludzie na ķwieŋym powietrzu bez wątpienia będą woleli prawdziwą aktywnoķæ niŋ wirtualną, bez względu na to, jak realistyczna będzie VR).
Ucieczka: Innym moŋliwym, ale jeszcze nie szeroko przetestowanym, zastosowaniem wirtualnej rzeczywistoķci jest ucieczka od nudy i frustracji w prawdziwym ķwiecie. Moŋesz zaģoŋyæ HMD i bawiæ się w dŋungli z dinozaurami. Jeķli potwory próbują cię zjeķæ, moŋesz zdjąæ heģm. Moŋesz iķæ dalej na jakiejķ nieznanej planecie lub pod powierzchnią morza, moŋesz lataæ wysoko nad chmurami lub tunelem przez ķrodek ziemi.
Ograniczenia
Dziedzina VR jest zģoŋona, wymagająca i trudna z inŋynieryjnego punktu widzenia. Wymyķlanie zastosowaņ i scenariuszy VR to jedno; wprowadzenie ich do dziaģania po rozsądnych kosztach to coķ zupeģnie innego. Koszt: najwyŋszej klasy, interaktywny system VR moŋe kosztowaæ nawet 250 000 USD Podczas gdy wysokiej klasy komputer osobisty i urządzenia peryferyjne kosztujące ģącznie okoģo 5000 USD mogą byæ uŋywane do interaktywnej VR, rozdzielczoķæ obrazu jest niska, a ķcieŋki doķwiadczenia są ograniczone . Reakcja jest raczej powolna ze względu na ogromne wymagania dotyczące pojemnoķci pamięci i szybkoķci przetwarzania. Jednak komputery stają się coraz mocniejsze i taņsze. Oczekiwanie: Pojemnoķæ pamięci komputera wzrasta o okoģo 100 procent rocznie. Najnowsze wysiģki na rzecz opracowania chipów i biochipów pamięci pojedynczego elektronu (SEM) budzą nadzieję, ŋe komputery będą rywalizowaæ z ludzkim mózgiem pod względem gęstoķci danych. Szybkoķæ przetwarzania równieŋ roķnie, poniewaŋ prędkoķci zegara są coraz szybsze, a magistrale danych coraz szersze, niemniej jednak oczekiwania w rzeczywistoķci wirtualnej historycznie wyprzedziģy technologię. Reakcje: Niektórzy technofile uwaŋają VR za tak fascynujący, ŋe uŋywają jej jako ucieczki od rzeczywistoķci, a nie jako urządzenia rozrywkowego. Zwolennicy VR twierdzą, ŋe nie oznacza to problemu z VR, tak samo jak "uzaleŋnienie od komputera" nie stanowi problemu z komputerami. Badacze twierdzą, ŋe problem tkwi w gģowach ludzi, którzy na początku są nieprzystosowani. Inni ludzie boją się doķwiadczeņ VR; niektóre iluzje VR są tak intensywne, jak halucynacje wywoģane przez narkotyki, kolejny problem wynika ze zjawiska niesamowitej doliny, w której ludzie boją się inteligentnych maszyn
VISION SYSTEM [SYSTEM WIZYJNY]
Jedną z najbardziej zaawansowanych funkcji robota mobilnego jest system wizyjny, zwany takŋe widzeniem maszynowym. Istnieje kilka róŋnych projektów; optymalny projekt zaleŋy od zastosowania.
Skģadniki systemu ķwiatģa widzialnego.
System wizyjny ķwiatģa widzialnego musi mieæ urządzenie do odbierania przychodzących obrazów. Zwykle jest to kamera wideo typu vidicon lub urządzenie ze sprzęŋeniem ģadunkowym. W jasnym ķwietle moŋna uŋyæ ortykonu obrazu. Kamera wytwarza analogowy sygnaģ wideo. Aby uzyskaæ najlepszą wizję maszynową, naleŋy to przetworzyæ na postaæ cyfrową. Odbywa się to za pomocą przetwornika analogowo-cyfrowego (ADC). Sygnaģ cyfrowy jest następnie oczyszczany przez cyfrowe przetwarzanie sygnaģu (DSP). Uzyskane dane trafiają do sterownika robota. Ilustracja przedstawia schemat blokowy tego schematu.
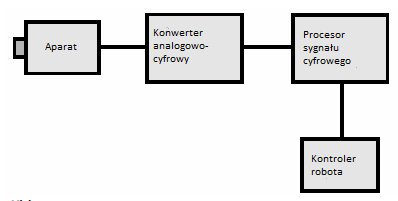
Ruchomy obraz odebrany z kamery i przetworzony zawiera olbrzymią iloķæ informacji. Ģatwo jest przedstawiæ kontroler robota ze szczegóģowym i znaczącym ruchomym obrazem. Trudniej jest sprawiæ, by robot "wiedziaģ", co dzieje się w danym scenariuszu, na podstawie otrzymywanych danych wizualnych Przetwarzanie obrazu i wyciągnięcie z niego wszelkich informacji jest wyzwaniem dla inŋynierów systemów wizyjnych.
Wizja i sztuczna inteligencja
W obrazie są subtelne rzeczy, których maszyna nie zauwaŋy, chyba ŋe ma niezwykle zaawansowany poziom sztucznej inteligencji (AI). Na przykģad, jak robot ma "wiedzieæ", czy obiekt stanowi zagroŋenie? Czy to czworonoŋne stworzenie to duŋy pies, czy tygrys? W jaki sposób robot moŋe poznaæ zamiary poruszającego się obiektu, jeķli taki ma? Czy to dwunoŋne stworzenie to czģowiek czy inny robot? Dlaczego trzyma kij? Czy kij to broņ? Co dwunoŋny chce zrobiæ z kijem? Moŋe to byæ kobieta z zamkniętym parasolem lub chģopiec z kijem baseballowym. Moŋe to byæ starzec z laską lub myķliwy z karabinem. Dla istoty ludzkiej ģatwo jest odróŋniæ róŋnicę i oceniæ odpowiednie zachowania, aby poradziæ sobie w kaŋdej z tych sytuacji; zaprogramowanie robota tak, aby miaģ taki sam poziom oceny, jest niezwykle zģoŋone. Wiesz od razu, czy ktoķ ma przy sobie podnoķnik, który pomoŋe Ci naprawiæ przebitą oponę, czy teŋ ķciska ģyŋkę do opon, którą rozbije Ci przednią szybę. Jak robot moŋe wiedzieæ takie rzeczy? Dla robota policyjnego lub ochronnego waŋne byģoby, aby wiedziaģ, co stanowi zagroŋenie, a co nie. Zmienne na obrazie są podobne do tych w ludzkim gģosie. System wizyjny, aby uzyskaæ peģne znaczenie obrazu, musi byæ co najmniej tak wyrafinowany, jak system rozpoznawania mowy wysokiego poziomu. Technologia nie osiągnęģa jeszcze poziomu sztucznej inteligencji potrzebnego do ludzkiego widzenia maszynowego i przetwarzania obrazu. Na szczęķcie w wielu zastosowaniach robotów nie jest konieczne, aby robot bardzo "rozumiaģ" to, co się dzieje. Roboty przemysģowe są zaprogramowane do wyszukiwania pewnych, ģatwych do zidentyfikowania rzeczy. Butelka, która jest zbyt wysoka lub zbyt krótka, nierówna powierzchnia lub wada w kawaģku materiaģu są ģatwe do wykrycia.
Czuģoķæ i rozdzielczoķæ
Dwie waŋne specyfikacje w kaŋdym systemie wizyjnym to czuģoķæ i rozdzielczoķæ. Czuģoķæ to zdolnoķæ maszyny do widzenia w sģabym ķwietle lub do wykrywania sģabych impulsów o niewidzialnych dģugoķciach fal, takich jak podczerwieņ (IR) lub ultrafiolet (UV). W niektórych ķrodowiskach wymagana jest wysoka czuģoķæ. W innych nie jest to potrzebne i moŋe nie byæ poŋądane. Robot pracujący w jasnym ķwietle sģonecznym nie musi dobrze widzieæ w ciemnej jaskini. Robot przeznaczony do pracy w kopalniach, rurach lub jaskiniach musi widzieæ w sģabym ķwietle, korzystając z systemu, który moŋe byæ oķlepiony zwykģym ķwiatģem dziennym. Rozdzielczoķæ to stopieņ, w jakim maszyna moŋe rozróŋniaæ obiekty. Im lepsza rozdzielczoķæ, tym ostrzejsza będzie wizja. Ludzkie oczy mają doskonaģą rozdzielczoķæ, ale maszyny moŋna projektowaæ z większą rozdzielczoķcią. Generalnie im lepsza rozdzielczoķæ, tym bardziej ograniczone musi byæ pole widzenia. Aby zrozumieæ, dlaczego to prawda, pomyķl o teleskopie. Im większe powiększenie, tym lepsza rozdzielczoķæ (do pewnego punktu). Jednak zwiększenie powiększenia zmniejsza kąt lub pole widzenia. Zerowanie jednego obiektu lub strefy odbywa się kosztem innych obiektów lub stref. Czuģoķæ i rozdzielczoķæ zaleŋą od siebie w pewnym stopniu. Zwykle lepsza czuģoķæ oznacza poķwięcenie w rozdzielczoķci. Ponadto im lepsza rozdzielczoķæ, tym gorzej system wizyjny będzie dziaģaģ w sģabym ķwietle. Moŋe wiesz coķ o kliszy fotograficznej. Film szybki ma zwykle grubsze ziarno niŋ film wolny. Niewidzialne i pasywne widzenie Roboty mają duŋą przewagę nad ludžmi, jeķli chodzi o widzenie. Maszyny mogą widzieæ na dģugoķciach fal, na które my, ludzie, jesteķmy ķlepi. Ludzkie oczy są wraŋliwe na fale elektromagnetyczne, których dģugoķæ waha się od okoģo 390 do 750 nanometrów (nm). Nanometr to jedna miliardowa (10 9) metra. Ķwiatģo o najdģuŋszej widzialnej dģugoķci fali wygląda na czerwone. Wraz ze zmniejszaniem się dģugoķci fali kolor zmienia się na pomaraņczowy, ŋóģty, zielony, niebieski i indygo. Najkrótsze fale ķwietlne wyglądają na fioletowe. Energia przy dģugoķci fal nieco dģuŋsze niŋ 750 nm to podczerwieņ; energia przy dģugoķciach fal nieco krótszych niŋ 390 nm to UV. Maszyny nie muszą i często nie widzą w tym samym zakresie dģugoķci fal, co widzi ludzkie oko. Owady widzą promieniowanie UV, którego ludzie nie mogą, ale są ķlepe na czerwone i pomaraņczowe ķwiatģo, które widzą ludzie. (Wielu ludzi uŋywa pomaraņczowych "ķwiateģ owadów" podczas biwakowania lub lamp UV z urządzeniami elektrycznymi, które przyciągają owady, a następnie je niszczą). Robota moŋna zaprojektowaæ tak, aby widziaģ promieniowanie podczerwone lub ultrafioletowe lub jedno i drugie, a takŋe (lub zamiast) ķwiatģo widzialne. Kamery wideo mogą byæ wraŋliwe na zakres dģugoķci fal znacznie szerszy niŋ zasięg, który ludzie widzą. Roboty moŋna zmusiæ do widzenia w ķrodowisku, które jest ciemne i zimne, i które emituje zbyt maģo energii, aby moŋna je byģo wykryæ na dowolnej dģugoķci fali elektromagnetycznej. W takich przypadkach robot zapewnia wģasne oķwietlenie. Moŋe to byæ prosta lampa, laser, urządzenie na podczerwieņ lub urządzenie UV. Alternatywnie, robot moŋe emitowaæ fale radiowe i wykrywaæ echa; to jest radar. Niektóre roboty mogą nawigowaæ za pomocą echa akustycznego (ultradžwiękowego), jak nietoperze; to jest sonar.
Język dobrze ustrukturyzowany jest zaawansowaną formą języka programowania komputerowego wysokiego poziomu. Języki te są uŋywane w programowaniu zorientowanym obiektowo, na przykģad we wszystkich komputerach osobistych, a takŋe w programowaniu sterowników robotów.
Zasoby
Gģówną zaletą dobrze zorganizowanego języka jest fakt, ŋe moŋe on pomóc w pisaniu wydajnych, logicznych programów. Dobrze skonstruowane oprogramowanie moŋna ģatwo zmieniæ. Często wykorzystuje programowanie moduģowe: programy w programach. Moduģy są przestawiane i / lub zastępowane do róŋnych zastosowaņ. Dobrze skonstruowane programy dają się ģatwo debugowaæ. W większoķci języków wysokiego poziomu program komputerowy moŋna napisaæ na wiele róŋnych sposobów. Niektóre są bardziej wydajne niŋ inne. Efektywnoķæ programu komputerowego moŋna mierzyæ na trzy sposoby w odniesieniu do zadaņ, do których realizacji program jest przeznaczony:
• Wymagane miejsce na dysku
• Pamięæ wymagana do dziaģania programu
• Iloķæ czasu komputera potrzebnego do uruchomienia programu
Czynniki te są ze sobą ķciķle powiązane. Wydajny program potrzebuje mniej miejsca na dane, mniej pamięci i mniej czasu do uruchomienia niŋ nieefektywny, gdy wszystkie inne czynniki są niezmienne. Gdy zuŋyta pamięæ i pamięæ są zminimalizowane, komputer moŋe uzyskaæ dostęp do danych w krótkim czasie. W ten sposób moŋe rozwiązaæ moŋliwie największą liczbę problemów w danym okresie czasu. W sztucznej inteligencji (AI) wymagany jest dobrze zorganizowany język. W tej najbardziej wymagającej i zģoŋonej dziedzinie informatyki, naleŋy uŋywaæ najpotęŋniejszych dostępnych technik programowania.
Dwie formy
Strukturyzacja programu kontrolera robota moŋe przyjąæ jedną z dwóch form ,które moŋna nazwaæ programowaniem odgórnym i oddolnym. W podejķciu odgórnym uŋytkownik komputera patrzy na caģy scenariusz i zeruje w róŋnych częķciach, w zaleŋnoķci od natury problemu, który ma zostaæ rozwiązany. Dobrym tego przykģadem jest skorzystanie z sieci w celu znalezienia informacji o przepisach budowlanych w hrabstwie Dade na Florydzie. Moŋesz zacząæ od tematu takiego jak Prawo stanowe. Byģby katalog na ten temat, który poprowadziģby cię do czegoķ bardziej szczegóģowego, a moŋe nawet do konkretnego dziaģu, który chcesz. Programista, który napisaģ oprogramowanie, uŋyģby dobrze zorganizowanego języka, aby zapewniæ uŋytkownikom ģatwe wyszukiwanie danych. W podejķciu oddolnym zaczynasz od maģych kawaģków i rozbudowujesz do caģoķci. Dobra analogia to kurs rachunku róŋniczkowego. Pierwszą rzeczą do zrobienia jest nauczenie się podstaw algebry, geometrii analitycznej, ukģadów wspóģrzędnych i funkcji. Następnie wszystkie są uŋywane razem do róŋnicowania, caģkowania i rozwiązywania innych zģoŋonych problemów w rachunku róŋniczkowym. Na kursie komputerowego rachunku róŋniczkowego oprogramowanie byģoby napisane w dobrze ustrukturyzowanym języku, abyķ (student) nie traciģ czasu na uciekanie w ķlepe zauģki.
WHEEL-DRIVE LOCOMOTION [LOKOMOCJA Z NAPĘDEM NA KOĢA]
Lokomocja z napędem koģowym to najprostszy i najtaņszy sposób poruszania się robota. Dziaģa dobrze w większoķci ķrodowisk wewnętrznych. Najczęstsza liczba kóģ to trzy lub cztery. Robot trójkoģowy nie moŋe się chwiaæ, nawet jeķli powierzchnia jest trochę nieregularna. Jednak robot czterokoģowy jest ģatwiejszy do kierowania. Najbardziej znanym schematem sterowania jest obracanie niektórych lub wszystkich kóģ. W przypadku robota czterokoģowego jest to ģatwe. Przednie koģa są na jednej osi, a tylne na drugiej. Aby sterowaæ robotem, moŋna obróciæ kaŋdą oķ. Ilustracja w lewym górnym rogu przedstawia sterowanie przednią osią. Inną metodą sterowania robota jest poruszanie koģami z róŋnymi prędkoķciami. Jest to pokazane na prawym górnym rysunku trójkoģowego robota skręcającego w lewo. Tylne koģa są napędzane przez oddzielne silniki, podczas gdy przednie koģo obraca się swobodnie (bez silnika). Aby robot skręciģ w lewo, prawe tylne koģo porusza się szybciej niŋ lewe tylne koģo. Aby skręciæ w prawo, lewe tylne koģo musi obracaæ się szybciej. Trzecią metodą sterowania robotami napędzanymi koģami jest rozbicie maszyny na dwie częķci, z których kaŋda ma dwa lub więcej kóģ. Poģączenie między sekcjami moŋna obróciæ, powodując zmianę kierunku robota. Ten schemat jest pokazany na dolnej ilustracji. Prosty napęd na koģa ma ograniczenia. Jednym z problemów jest to, ŋe powierzchnia musi byæ doķæ gģadka. W przeciwnym razie robot moŋe utknąæ lub się przewróciæ. Ten problem moŋna do pewnego stopnia przezwycięŋyæ, stosując lokomocję z napędem gąsienicowym lub lokomocję koģa trójgwiazdowego. Inny problem pojawia się, gdy robot musi przejķæ z jednego piętra na drugie w budynku. Jeķli windy lub rampy nie są dostępne, robot napędzany koģami jest ograniczony do jednego piętra, jednak specjalnie zbudowane systemy tri-star mogą umoŋliwiæ robotowi napędzanemu koģami wchodzenie po schodach. Inną alternatywą dla napędu na koģa jest wyposaŋenie robota w nogi. Jest to droŋsze i trudniejsze do zaprojektowania niŋ jakikolwiek inny schemat.
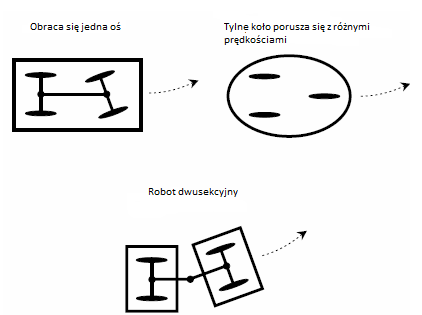
WORK ENVELOPE [OBWIEDNIA ROBOCZA]
Obwiednia robocza to zakres ruchu, w którym moŋe się poruszaæ ramię robota. W praktyce jest to zbiór punktów w przestrzeni, do których moŋe dotrzeæ efektor koņcowy. Rozmiar i ksztaģt obwiedni roboczej zaleŋy od wspóģrzędnych geometrii ramienia robota, a takŋe od liczby stopni swobody. Niektóre koperty robocze są pģaskie, prawie caģkowicie ograniczone do jednej pģaszczyzny poziomej. Inne są cylindryczne; jeszcze inne są kuliste. Niektóre koperty robocze mają skomplikowane ksztaģty. Ilustracja przedstawia prosty przykģad obwiedni roboczej ramienia robota wykorzystującego cylindryczną geometrię wspóģrzędnych. Zbiór punktów, do których moŋe dotrzeæ efektor koņcowy, znajduje się w dwóch koncentrycznych cylindrach, oznaczonych jako "wewnętrzna granica" i "zewnętrzna granica". Obszar roboczy tego ramienia robota ma ksztaģt nowej rolki taķmy do pakowania. Wybierając ramię robota do okreķlonego celu przemysģowego, waŋne jest, aby obszar roboczy byģ wystarczająco duŋy, aby obejmowaģ wszystkie punkty, do których ramię robota będzie musiaģo dotrzeæ. Ale marnotrawstwem jest uŋywanie ramienia robota z obszarem roboczym znacznie większym niŋ to konieczne.
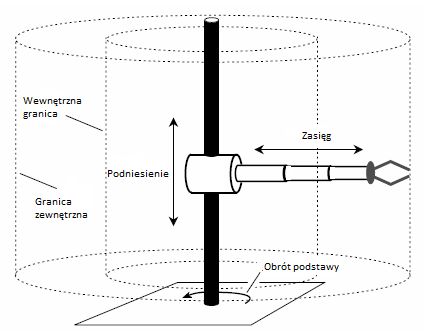
WORK ENVIRONMENT [ĶRODOWISKO PRACY]
Ķrodowisko pracy robota, zwane teŋ przestrzenią ķwiata, to region, w którym robot istnieje i moŋe wykonywaæ zadania. Róŋni się od obwiedni roboczej, która reprezentuje obszar przestrzeni, do którego moŋe dotrzeæ efektor koņcowy, gdy robot znajduje się w okreķlonym miejscu. W przypadku naziemnego robota mobilnego ķrodowisko pracy moŋna zdefiniowaæ w sposób uproszczony za pomocą dwuwymiarowego (2-D) ukģadu wspóģrzędnych, okreķlającego punkty na powierzchni, takie jak szerokoķæ i dģugoķæ geograficzna. W przypadku robotów mobilnych podmorskich lub powietrznych ķrodowisko pracy jest trójwymiarowe (3-D).
WORLD MODEL [MODEL ĶWIATA]
Termin model ķwiata odnosi się do koncepcji, którą robot rozwija w swoim ķrodowisku pracy. Koncepcja ta jest uzyskiwana z wyjķæ czujników, wczeķniej uzyskanych danych (jeķli takie istnieją) oraz informacji, które kontroler robota wyprowadza na temat jego optymalnego zachowania. Model ķwiata powinien moŋliwie najbliŋej przybliŋaæ rzeczywistoķæ fizyczną i sprawczą. Kaŋda osoba ma koncepcję ķrodowiska - "otaczającego nas ķwiata" - ale róŋni się ona nieco w zaleŋnoķci od róŋnych czynników. W ten sam sposób postrzeganie ķwiata przez robota zaleŋy od takich czynników, jak
• Lokalizacja robota
• Zjawiska, które robot moŋe wykryæ
• Czuģoķæ czujników
• Rozdzielczoķæ czujników (jeķli dotyczy)
• Mapa komputerowa (jeķli istnieje), którą posiada kontroler robota
• Informacje uzyskane od innych robotów
• Informacje uzyskane od ludzi
• Obecnoķæ lub brak wprowadzających w bģąd danych wejķciowych
Dwa identyczne roboty w tej samej ogólnej lokalizacji i poddane identycznym warunkom mają identyczne modele ķwiata, chyba ŋe jedna lub obie maszyny ulegną awarii lub jeden z robotów ma inną bazę wiedzy niŋ pozostaģe. Jeķli oba roboty mają sztuczną inteligencję (AI), a ich "doķwiadczenia ŋyciowe" są róŋne, moŋna oczekiwaæ, ŋe roboty będą inaczej postrzegaæ otoczenie, nawet jeķli znajdują się w tej samej ogólnej lokalizacji.
WYKRYWANIE SIĢY NADGARSTKA
W punkcie, w którym ramię robota ģączy się z efektorem koņcowym, istnieje kilka róŋnych siģ. Ten punkt nazywa się nadgarstkiem. Ma jeden lub więcej stawów, które poruszają się na róŋne sposoby. Czujnik siģy nadgarstka moŋe wykryæ i zmierzyæ te siģy. Skģada się ze specjalistycznych czujników ciķnienia zwanych tensometrami. Tensometry zamieniają siģy dziaģające na nadgarstek na sygnaģy elektryczne, które trafiają do sterownika robota. W ten sposób maszyna moŋe okreķliæ, co dzieje się na nadgarstku i odpowiednio zareagowaæ. Siģa nadgarstka jest zģoŋona. Do przedstawienia wszystkich moŋliwych ruchów, które mogą mieæ miejsce, potrzeba kilku wymiarów. Ilustracja przedstawia hipotetyczny nadgarstek robota i siģy, które mogą tam wystąpiæ. Orientacje to prawo / lewo, wejķcie / wyjķcie oraz góra / dóģ. Obrót jest moŋliwy we wszystkich trzech osiach. Siģy te nazywane są pochyleniem, przechyģem i odchyleniem. Czujnik siģy nacisku na nadgarstek musi niezaleŋnie wykrywaæ i tģumaczyæ kaŋdą z siģ. Zmiana jednego wektora musi powodowaæ zmianę sygnaģu wyjķciowego czujnika dla tej siģy, a nie innych.
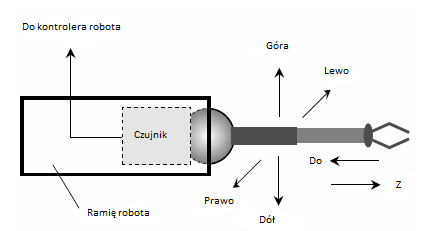
Termin oķ x ma róŋne znaczenia w matematyce, informatyce i robotyce. Na wykresie kartezjaņskim lub wykresie z 2 przestrzeniami oķ x jest ogólnie osią poziomą (ilustracja po lewej stronie). Oķ ta reprezentuje zmienną niezaleŋną. W trójwymiarowej przestrzeni kartezjaņskiej oķ x jest jedną z dwóch zmiennych niezaleŋnych, a druga jest zwykle reprezentowana przez y (ilustracja po prawej). W wykrywaniu siģy nadgarstka oķ x odnosi się do siģ liniowych z prawej lub lewej strony
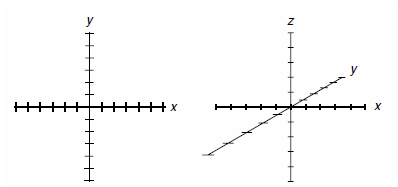
XR ROBOTY
Roboty XR byģy manipulatorami wymyķlonymi, zaprojektowanymi i zbudowanymi przez firmę Rhino Robots. Gģównym celem urządzeņ byģo pokazanie, jak dziaģają roboty i ŋe nie ma cudu w ich dziaģaniu. Roboty XR zostaģy wprowadzone na rynek w latach 80-tych i byģy sprzedawane za mniej niŋ 3000 USD za sztukę. Wykonywaģy róŋne zadania z duŋą precyzją i uŋywaģy urządzenia programującego podobnego do panelu uczącego. W przypadku zadaņ obejmujących wiele czynnoķci wykonywanych w okreķlonej kolejnoķci, jako kontrolera robota moŋna uŋyæ komputera osobistego. Roboty XR okazaģy się przydatne jako pomoce dydaktyczne w korporacjach i szkoģach, a wiele osób czuje się nieswojo w stosunku do robotów, zwģaszcza typu programowalnego. Roboty XR pomogģy ludziom uwolniæ się od obaw, jakie czasami mają wobec robotów.
YAW [ODCHYLENIE]
Odchylenie jest jednym z trzech rodzajów ruchu, jakie moŋe wykonaæ robotyczny efektor. Wyciągnij rękę prosto i wskaŋ coķ palcem wskazującym. Następnie przesuņ nadgarstek tak, aby palec wskazujący wskazywaģ w tę i z powrotem (w lewo i w prawo) w pģaszczyžnie poziomej. Ten ruch to odchylenie w nadgarstku.
Y OĶ
Termin oķ y ma róŋne znaczenia w matematyce, informatyce i robotyce. Na wykresie kartezjaņskim lub wykresie z 2 przestrzeniami oķ y jest zwykle osią pionową (ilustracja po lewej). Ta oķ reprezentuje zmienną zaleŋną. W funkcji matematycznej f zmiennej niezaleŋnej x inŋynierowie okreķlają y = f (x). Funkcja odwzorowuje wartoķci x na wartoķci y. W trójwymiarowej przestrzeni kartezjaņskiej oķ y jest jedną z dwóch zmiennych niezaleŋnych, a druga jest zwykle reprezentowana przez x (ilustracja po prawej). W wykrywaniu siģy nadgarstka oķ y odnosi się do liniowych wektorów siģy skierowanych do wewnątrz / na zewnątrz.
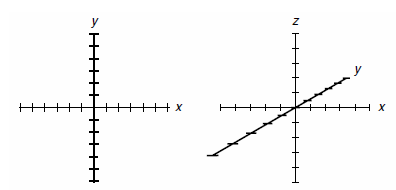
Z OĶ
Termin oķ z ma róŋne znaczenia w matematyce, informatyce i robotyce. W trójwymiarowej przestrzeni kartezjaņskiej oķ z reprezentuje zmienną zaleŋną, która jest funkcją dwóch niezaleŋnych zmiennych x i y. Oķ z przebiega pionowo, podczas gdy pģaszczyzna (x, y) jest pozioma, jak pokazano na ilustracji. Funkcja f odwzorowuje wartoķci x i y na wartoķci z, tak ŋe z = f (x, y). W wykrywaniu siģy nadgarstka oķ z odnosi się do liniowych wektorów siģy w górę / w dóģ (pionowych).
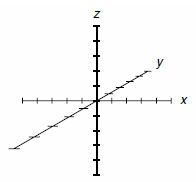
ZOOMING
W zrobotyzowanym systemie wizyjnym termin zooming odnosi się do powiększenia obrazu. Jeķli chcesz bardziej szczegóģowo przyjrzeæ się okreķlonej częķci ekranu, moŋesz ją powiększyæ. Ilustracje przedstawiają hipotetyczną, nieskoņczenie zģoŋoną linię brzegową lub granicę. Najniŋsze powiększenie znajduje się w lewym górnym rogu. Po powiększeniu okreķlonej częķci tej grafiki ujawnia się więcej szczegóģów (w prawym górnym rogu). Proces powiększania jest powtarzany, odsģaniając jeszcze więcej szczegóģów (dolna ilustracja). Poniewaŋ granica jest nieregularna we wszystkich skalach, powiększanie moŋe byæ wykonywane w nieskoņczonoķæ, a na obrazie zawsze pojawiają się nowe szczegóģy. Zoomowanie, choæ teoretycznie zwiększa powiększenie, moŋe zwiększyæ rozdzielczoķæ tylko do pewnego punktu, w zaleŋnoķci od jakoķci zastosowanego ukģadu optycznego. Ogólnie rzecz biorąc, im większa ķrednica obiektywu, tym lepsza jest ostateczna rozdzielczoķæ. Zoom ogranicza równieŋ widzenie, zawęŋając pole widzenia. W pokazanych przykģadach widok w prawym górnym rogu ma 1?5 (20 procent) ķrednicy kątowej widoku w lewym górnym rogu; widok na dole ma 1?5 (20 procent) ķrednicy kątowej widoku w prawym górnym rogu, a zatem 1?25 (4 procent) ķrednicy kątowej widoku w lewym górnym rogu.